
Optimizing Sample Patches Selection of CNN to Improve the mIOU
on Landslide Detection
Omid Ghorbanzadeh
a
and Thomas Blaschke
b
Department of Geoinformatics - Z-GIS, University of Salzburg, Salzburg, Austria
Keywords: Convolutional Neural Network, RapidEye, mean Intersection Over Union, Training Data Set.
Abstract: Remarkable improvement has been made in object detection and image classification, mainly due to the
availability of large-scale labelled data and also the progress of deep convolutional neural networks (CNNs).
Thus, this amount of training data enables CNNs to learn data-driven image features. However, generating
the efficient sample patches from the satellite images for training the CNNs remains a challenge. In this
study, we use a CNN for the case of landslide detection based on the optical data from the Rapid Eye
satellite. We separate the image into training and test areas of the highly landslide-prone Rasuwa district in
Nepal. Thus, the sample patches were extracted from the training area of the Rapid Eye image. Although the
approach of random sample patches is considered as the most common for feeding the CNNs, it is not the
best solution for all object detection aims. We feed our structured CNN with the randomly selected sample
patches as our first approach. For the second approach, the same CNN architecture is trained by the patches
that selected based on only the central areas of any landslide. The trained CNNs based on both approaches
were used to detection the landslides in an area where considered as our test zone. The detection results are
compared against a precise inventory dataset of landslide polygons through a mean intersection-over-union
(mIOU). The mIOU value of the first approach is 53.56%. However, that of the second one is 56.24%,
which shows an approximately 3% improvement in the resulting accuracy of the landslide detection using
the sample patches generated by the second approach. Rather, the current performance of CNNs in object
detection domain they strongly depend on the quality of the training data and augmentation strategies.
a
https://orcid.org/0000-0002-9664-8770
b
https://orcid.org/0000-0002-1860-8458
1 INTRODUCTION
Landslide detection has been considered as one of
the important active study domains in remote
sensing today because of the adverse consequences
of this natural hazard on the human habitation (Hong
et al., 2017). It is essential regarding fast response
actions after a destructive landslide. Although there
are some new field surveying methods for landslide
detection and mapping, e.g. laser rangefinder
binoculars by applying a GPS receiver (Guzzetti et
al., 2012), the problems of the accessing to such
areas still remains a challenge . Therefore, remotely
sensed imagery is the most accessible data providing
critical information required for supporting
humanitarian response (Lang et al., 2017). Analysis
and classification of the remotely sensed imagery for
extracting landslides have done in several studies.
Previous researches have primarily focused on
detecting the changes occurred on the environment
due to the landslides based on the remotely sensed
imagery and some knowledge-based methods or
manually image processing methods (Amit and
Aoki, 2017). Moreover, different machine learning
techniques, e.g. MLP Neural Nets have been used
for landslide detection (Mezaal et al., 2017; Bui et
al., 2016). (Moosavi et al., 2014) proposed a
landslide detection approach based on support vector
machines to find whether the occurrence of the
landslide.
Recently, convolutional neural networks (CNNs)
have become the new hot topic in various image
processing domains and object detection in
particular (Zhang et al., 2018). CNNs are specific
Ghorbanzadeh, O. and Blaschke, T.
Optimizing Sample Patches Selection of CNN to Improve the mIOU on Landslide Detection.
DOI: 10.5220/0007675300330040
In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2019), pages 33-40
ISBN: 978-989-758-371-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
33

kind of deep learning techniques based on artificial
neural networks. CNNs can directly get the images
as input data, to avoid the traditional approaches
with pre-processing methods and feature extraction
by the complex operations (Yu et al., 2017). They
have achieved acceptable results in wide range of
image analysis tasks in computer vision (Zhu et al.,
2017; Ghorbanzadeh et al., 2018). There are several
studies that used CNNs for image segmentation
(Längkvist et al., 2016), scene classification
(Qayyum et al., 2017), and object detection
(Radovic et al., 2017). The large numbers of labelled
images along with CNNs were used to some object
detection aims, e.g. airplanes, vehicles, and some
specific trees. The availability of massive amount of
labelled images is considered as one of the main
reasons for achieving fairly good results by CNNs.
However, the way of using these data for training
the CNNs is still a topic of discussion. Randomly
sample patches selection is the common and
traditional way to patch extraction for the CNNs, but
not the best method for any application. A critical
problem in object detection using CNNs is the
selection way of sample patches. Because in some
cases such as landslide detection results with poor
quality when the sample patches are selected
randomly. Therefore, the method of selection of the
patches can be improved regarding the target object
that should be detected. For example, the Genetic
Algorithm was used to identify the best sample
patches from all of the selected patches of tile-based
texture synthesis by (Dong et al., 2005). In another
study (Zhang et al., 2018) used the Moment
bounding (MB) box for identifying the location of
the optimal patches on objects in the urban land use
classification. However, using the mentioned
approaches for the case of landslide detection has
some difficulties regarding the various shapes of
landslides.
In this study, ones we use the conventional
approach of a random selection of sample patches.
Then we selected the sample patches were located
on the central part of any landslide. Most of the
landslides have linear shape started from SCAR
(area of initial failure) to the deposition area (Fan)
that leads to a high ratio of length to width. Thus, we
selected the patches of the central areas of the
landslides to get those with the most area from
landslides. Both approaches of randomly and central
selection of sample patches were implemented on
optical satellite imagery from the Rapid Eye sensor.
We compare the results from the CNNs based on
both approaches to illustrate the performance of each
approach and its impact on landslide detection. For
comparison, the resulting detected landslide the
mean intersection-over-union (mIOU) accuracy
assessment method was used.
2 STUDY AREA
The case study area lies in the southern part of the
Rasuwa district in Nepal (see figure 1). The study
area has an area of about 1544 km2. The land cover
is mostly forest, followed by shrub land, grassland,
agriculture, and villages. This district is located in
the higher Himalayas and is one of the most
landslide-prone areas along the Trishuli River. Some
of the known landslides had adverse consequences
on the built-up areas and have already caused
casualties in settlement areas. Landslides have also
destroyed the bridges and roads of the main
transport corridor between this country and China.
Figure 1: The geographic location of the study area.
3 METHODOLOGY
3.1 Overall Methodology
The Rapid Eye images were used to evaluate the
performance of two approaches of randomly and
central sample patches selection within a structured
CNN for the detection of landslides. The workflow
of the present study is as follow:
Landslide inventory data set creation;
Designing the training data set of the spectral
information;
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
34

Generating the random sample patches by
considering a window size of 32×32 pixels;
Generating the central sample patches by
considering the same window size;
Structuring CNN;
Testing and validating the performances of each
sample patches selection approaches using
mIOU method.
The experimental results and related descriptions of
this study are organized in the following sections.
More explanations and discussions about the impact
of using different approaches on the resulting
landslide detection can be found in the conclusion
section.
3.2 Landslide Inventory
Our landslide inventory data set was generated
within an extensive field survey in the Rasuwa
district in the higher Himalayas using a GPS device
(Garmin Etre 20X). The resulting GPS polygons of
landslides were then manually boosted using the
satellite images. Therefore, our inventory data set
was generated using the GPS data, correcting
instances, and finally adding landslide areas visible
in the image but not mapped in the field. The
Geographic Information System ArcGIS 10.3 was
used for the correction process.
3.3 Data
The data used for the present study is from
RapidEye that is a constellation of five Earth-
observing satellites with a height of 680 km, the
swath width of 77 km and a 5-day revisit period.
These five satellites deliver sun synchronous of 5
m spatial resolution images (Mahdianpari et al.,
2018). Two RapidEye cloud-free satellite images
were used for this study. We used multispectral
bands (Red, Green, Blue, Red Edge, and Near
Infrared) of RapidEye as following:
Blue 440 – 510 nm;
Green 520 – 590 nm;
Red 630 – 685 nm;
Red Edge 690 – 730 nm;
Near-Infrared 760 – 850 nm.
Moreover, the normalized difference vegetation
index (NDVI) as a widely used ratio was calculated
from the near-infrared and the red spectral bands
(Modzelewska et al., 2017). Therefore, we prepared
a data set of the spectral information of RapidEye
and the NDVI.
3.4 Convolution Neural Network
(CNN)
CNNs have introduced state-of-the-art results for
image processing and computer vision (Zhang et al.,
2018). Multi-layer neural networks of a CNN can
obtain the important feature representations of an
image. Thus, these networks can distinguish the
visual laws in the image without any expert-
designed complex rule (Ding et al., 2016). CNNs
have a basic architecture, where each so-called
hidden layer normally contains convolutional and
pooling layers, whereby the convolutional layers are
considered as the main building block of any CNN
(Ghorbanzadeh et al., 2018). The sample patches of
the input image are convolving with a set of
trainable kernels that scan across the entire input
patch resulting in a group of feature maps.
Therefore, the set feature maps result from the
convolution of the filter, with its corresponding local
region on the original sample patches of the input
image.
Structuring a CNN with the architecture that
results in the best performance vary regarding the
application and still is an ongoing discussion in the
deep learning field (Csillik et al., 2018). In this
study, a seven-layer depth CNN was structured and
trained separately with sample patches resulting
from both random and central approaches. This layer
depth was selected according to our sample patches
size of 32×32 through cross-validation. By using
two different sample patches and the same CNN, we
could investigate the impacts of sample selection
approaches on landslide detection. Our structured
CNN was fed by the input sample patches with
32×32×6 units, where 32×32 is the size of one layer
of sample patches and 6 is the number of image
layers (Red, Green, Blue, Red Edge, and Near
Infrared). The first convolution layer was
implemented with a filter size of 5 continuing with
further convolution layers with a smaller filter size
of 3. A max-pooling layer of 2×2 was used
immediately after any convolution layer except the
last one. The architecture of the CNN is shown in
figure 5.
3.5 Sample Patches Selection
In this section, the generation of two different the
datasets based on random and central approaches as
well as the problem of using the moment bounding
(MB) box for our case is detailed. Generally, the
scope of the datasets is to obtain a consistent set of
patches with the aim of training the CNNs for any
Optimizing Sample Patches Selection of CNN to Improve the mIOU on Landslide Detection
35
object detection or classification aims (Depeursinge
et al., 2012). The random selection of the patches
approach was used in several studies, and the
randomly extracted patches were applied to train
their network (Wei et al., 2014; Ghorbanzadeh et al.,
2019). The moment bounding (MB) box is
considered as a useful method for finding the
position of the sample patches and also the size of
the patches. However, for the object of the landslide,
on the one hand, this method leads to defining a
wide range of patch sizes and consequently much
more computations. On the other hand, considering
the specific shape of some landslides (see figure 2),
selecting the patches based on the position that
defined by MB box results in having much more
non-landslide areas in the patch. It means the CNN
would train by the patches that have less useful data
for landslide detection. Using the MB box for CNN
is fully described by (Zhang et al., 2018).
Figure 2: An illustration of different sizes and shapes of
the landslides that resulted in different moment bounding
(MB) boxes.
In this study, we used this approach for
generating our first training data set. The CNN that
trained with this approach was named as random-
CNN. More than 3000 original samples were
generated from the training area (see figure 1).
However, approximately 2000 sample patches were
manually extracted from the central areas of
landslides. The lower number of central sample
patches is because of avoiding much overlap of
patches on the image. By selecting the patches from
the central areas of the landslides, it is more likely to
have more areas from the landslide polygon in the
extracted patch than the non-landslide areas.
Therefore, the central-CNN will train with the
patches that have more data from the landslide areas.
The difference of sample patches selection is
illustrated in figure 2.
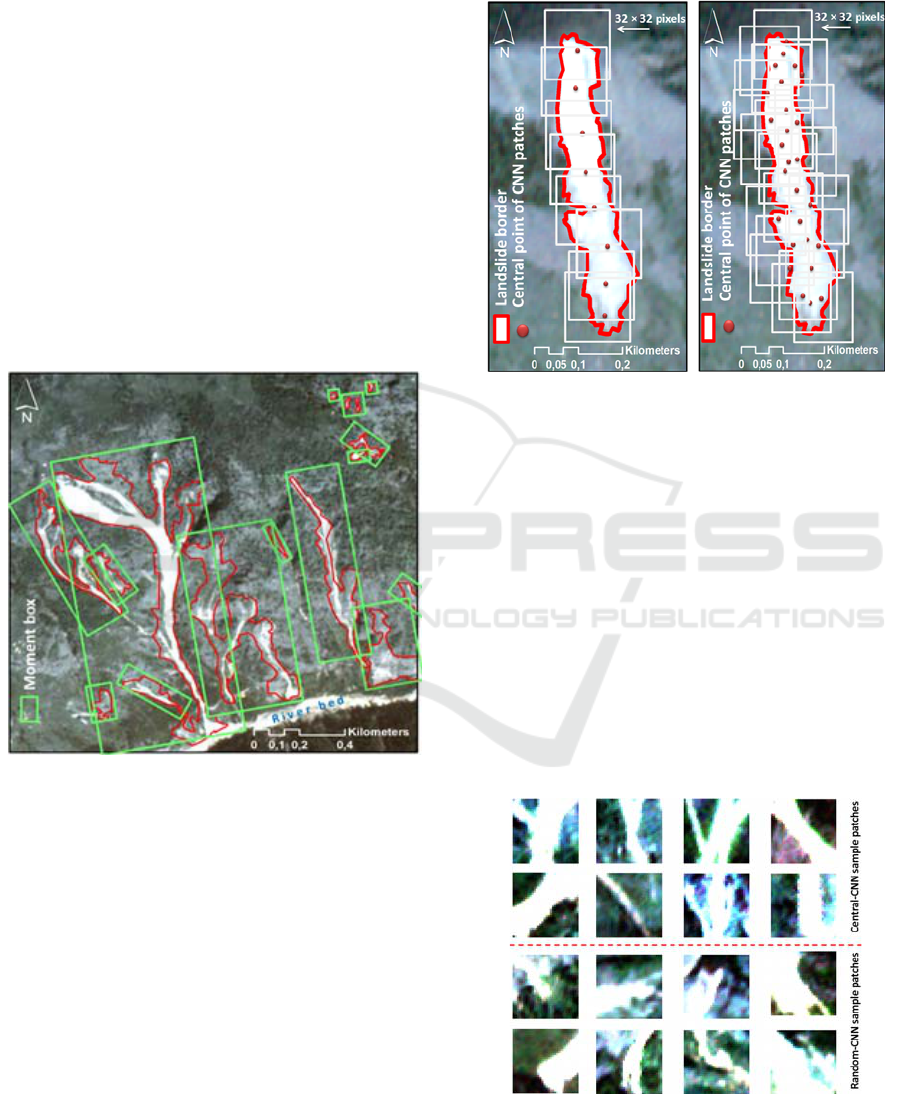
Figure 3: An example of the sample patches selection
based on central (left) and random (right) approaches.
4 RESULTS
The same CNNs trained with different sample
patches extracted from both random and central
approaches were tested on the Rasuwa district where
considered as our test area. For both CNNs, we used
the same threshold of 95% and those detected
landslides which were smaller than 70 pixels were
removed. As described earlier, the main goal of this
study is to investigate the impact of using different
input sample patches of CNN on the accuracy of
landslide detection. The sample patches extracting
from both approaches are presented in figure 4.
Figure 4: An illustration of convolution input sample
patches extracting based on central (upper) and random
(lower) approaches.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
36

Figure 5: Flowchart of different sections of the methodology and accuracy assessment.
Two landslide maps were generated based on
different sample patches selection approaches and
the same CNN. Figure 6 shows the resulting
landslide detected maps. Both approaches were
implemented with five spectral layers from the
RapidEye images (Red, Green, Blue, Red Edge, and
Near Infrared) and the NDVI.
Figure 6: Landslide detection results using central and
random-CNNs.
5 VALIDATION
5.1 Quantitative Results
In this section, we represent quantitative results of
the resulting maps based on random-CNN and
central-CNN. In this regard, the area and also the
percentage of three classified pixels, namely, true
positive (TP), false positive (FP), and false negative
(FN) were assessed. These are the common
measures that used in the remote sensing and the
computer vision domains to validate the
performance of the models. TP is referring to the
pixels that were correctly detected as the target
object. FP relates to pixels that were detected as the
target object, but they are not. FN points to ground
truths that are not detected as such by the applied
model (Guirado et al., 2017). Regarding the
calculation of these measures, a reliable inventory
data set of the ground truths is required. The
accuracy and details of the inventory data set can
easily affect the final accuracy assessment results.
Obtaining these measures make it possible to find
any uncertainty among the location, and boundaries
of the areas where the model detected as the
landslide area. The areas and percentages of each
Optimizing Sample Patches Selection of CNN to Improve the mIOU on Landslide Detection
37

measure and the approach were represented in table
1.
5.2 Mean Intersection Over Union
(mIOU)
The mIOU is an accuracy assessment metric applied
to measure the accuracy of the result of a predictor
model based on ground truth. The mIOU is a known
validation metric in computer vision domain,
particularly for object detection studies (Liu et al.,
2018). The mIOU is a general validation metric
where any model that generates bounding polygons
can be evaluated by using this metric based on an
inventory dataset of ground truth polygons (see
figure 7). It is defined as the mean of the following
equation (1):
IOU = (Area of Overlap)
⁄
(Area of Union) (1)
Figure 7: An illustration area of union and area of overlap.
The resulting mIOU value for both landslide
maps generated by random-CNN and central-CNN
were calculated and represented in table 1.
According to the mIOU values, random-CNN
yielded a landslide detection result with the mIOU
value of 53.56. However, using the central-CNN
improved the mIOU value to 56.24.
Table 1: The area and percentage of each measure along
with the mIOU.
Model
TP (ha)
TP (%)
FP (ha)
FP (%)
FN (ha)
FN (%)
mIOU (%)
Random-CNN
309.065
53.56 %
35.079
6.07 %
232.835
40.35 %
53.56
Central-CNN
186.839
56.24 %
81.092
24.42 %
64.227
19.34 %
56.24
6 DISCUSSION
In this study, we illustrated the importance of the
quality of CNN training sample patches on the final
result in the case of landslide detection. For the same
model used, different training strategies will
significantly influence the results. In this study, we
generated two different training data sets. First, we
randomly selected the sample patches from the
landslides that occurred in the area where we
considered as the training area. Second, we chose
sample patches from the central area of the same
landslides in the training area. Using the second
approach improved the value of the mIOU metric. It
means the landslides detected by the central-CNN
have more overlap with those of indicated by the
inventory map. However, it is not as simple as to
generally compare, for instance, the TP value of the
random-CNN is much more than that of central-
CNN.
Moreover, random-CNN could not detect only 6
% of all landslides in the test area. Whereas, this is
more than 24 % for the central-CNN. Therefore, the
second approach was not successful to detect a
quarter of the landslides, which is a significant
portion. The better achievement of the central-CNN
in the mIOU is because of it’s lower FN value
compare to that of random-CNN. Therefore, the
second approach showed a better performance to
differentiate between landslide and non-landslide
areas.
7 CONCLUSIONS
The growing availability of remotely sensed imagery
opens many options for updating any classification
and object detection through the deep learning
models. Generating of the appropriate training data
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
38

sets for these models is still a challenging task due to
the variety of the applications, scale of working and
target classes or objects. CNN training data sets are
traditionally generated by random sample patches
from the whole image or region of interest.
However, in parallel to the improvements in the
methodology and training processes, several
attempts have been made to improve the quality of
training data sets generating approaches. In this
study, we observed that selecting the CNN sample
patches from only the central part of objects such as
landslides is helpful to increase the final accuracy of
the results. Although we used fewer sample patches
for the central-CNN, we got a better result regarding
mIOU. Thus, we can conclude the quality of the
training data set for CNNs is as important as their
quantity. For our future study, we aim to develop an
object-based CNN method for the CNN sample
patches generation. We also want to evaluate the
multiple window sizes for the selection patches from
the landslides of different sizes.
ACKNOWLEDGEMENTS
This research is partly funded by the Austrian
Science Fund (FWF) through the GIScience
Doctoral College (DK W 1237-N23). Special thanks
are owed to Sansar Raj Meena, Department of
Geoinformatics, University of Salzburg, Austria.
REFERENCES
Amit, S. N. K. B., Aoki, Y. Disaster detection from aerial
imagery with convolutional neural network.
Knowledge Creation and Intelligent Computing (IES-
KCIC), 2017 International Electronics Symposium on,
2017. IEEE, 239-245.
Bui, D. T., Tuan, T. A., Klempe, H., Pradhan, B.,
Revhaug, I. 2016. Spatial prediction models for
shallow landslide hazards: a comparative assessment
of the efficacy of support vector machines, artificial
neural networks, kernel logistic regression, and
logistic model tree. Landslides, 13(2), pp 361-378.
Csillik, O., Cherbini, J., Johnson, R., Lyons, A., Kelly, M.
2018. Identification of Citrus Trees from Unmanned
Aerial Vehicle Imagery Using Convolutional Neural
Networks. Drones, 2(4), pp 39.
Depeursinge, A., Vargas, A., Platon, A., Geissbuhler, A.,
Poletti, P.-A., Müller, H. 2012. Building a reference
multimedia database for interstitial lung diseases.
Computerized Medical Imaging and Graphics, 36(3),
pp 227-238.
Ding, A., Zhang, Q., Zhou, X., Dai, B. Automatic
recognition of landslide based on CNN and texture
change detection. Chinese Association of Automation
(YAC), Youth Academic Annual Conference of, 2016.
IEEE, 444-448.
Dong, W., Sun, S., Paul, J.-C. Optimal sample patches
selection for tile-based texture synthesis. Computer
Aided Design and Computer Graphics, 2005. Ninth
International Conference on, 2005. IEEE, 6 pp.
Ghorbanzadeh, O., Blaschke, T., Gholamnia, K., Meena,
S. R., Tiede, D., Aryal, J. 2019. Evaluation of
Different Machine Learning Methods and Deep-
Learning Convolutional Neural Networks for
Landslide Detection. Remote Sensing, 11(2), pp 196.
Ghorbanzadeh, O., Tiede, D., Dabiri, Z., Sudmanns, M.,
Lang, S. 2018. Dwelling Extraction in Refugee Camps
Using CNN-First Experiences and Lessons Learnt.
International Archives of the Photogrammetry,
Remote Sensing, Spatial Information Sciences, 42(1),
pp.
Guirado, E., Tabik, S., Alcaraz-Segura, D., Cabello, J.,
Herrera, F. 2017. Deep-Learning Convolutional
Neural Networks for scattered shrub detection with
Google Earth Imagery. arXiv preprint
arXiv:1706.00917.
Guzzetti, F., Mondini, A. C., Cardinali, M., Fiorucci, F.,
Santangelo, M., Chang, K.-T. 2012. Landslide
inventory maps: New tools for an old problem. Earth-
Science Reviews, 112(1-2), pp 42-66.
Hong, H., Chen, W., Xu, C., Youssef, A. M., Pradhan, B.,
Tien Bui, D. 2017. Rainfall-induced landslide
susceptibility assessment at the Chongren area (China)
using frequency ratio, certainty factor, and index of
entropy. Geocarto international, 32(2), pp 139-154.
Lang, S., Schoepfer, E., Zeil, P., Riedler, B. Earth
observation for humanitarian assistance. GI Forum–J
Geogr Inf Sci, 2017. 157-165.
Längkvist, M., Alirezaie, M., Kiselev, A., Loutfi, A.
Interactive learning with convolutional neural
networks for image labeling. International Joint
Conference on Artificial Intelligence (IJCAI), New
York, USA, 9-15th July, 2016, 2016.
Liu, B., Dixit, M., Kwitt, R., Vasconcelos, N. Feature
Space Transfer for Data Augmentation. Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, 2018. 9090-9098.
Mahdianpari, M., Salehi, B., Rezaee, M.,
Mohammadimanesh, F., Zhang, Y. 2018. Very deep
convolutional neural networks for complex land cover
mapping using multispectral remote sensing imagery.
Remote Sensing, 10(7), pp 1119.
Mezaal, M. R., Pradhan, B., Sameen, M. I., Mohd Shafri,
H. Z., Yusoff, Z. M. 2017. Optimized neural
architecture for automatic landslide detection from
high‐resolution airborne laser scanning data. Applied
Sciences, 7(7), pp 730.
Modzelewska, A., Stereńczak, K., Mierczyk, M., Maciuk,
S., Bałazy, R., Zawiła-Niedźwiecki, T. 2017.
Sensitivity of vegetation indices in relation to
Optimizing Sample Patches Selection of CNN to Improve the mIOU on Landslide Detection
39

parameters of Norway spruce stands. Folia Forestalia
Polonica, 59(2), pp 85-98.
Moosavi, V., Talebi, A., Shirmohammadi, B. 2014.
Producing a landslide inventory map using pixel-based
and object-oriented approaches optimized by Taguchi
method. Geomorphology, 204(646-656.
Qayyum, A., Malik, A. S., Saad, N. M., Iqbal, M., Faris
Abdullah, M., Rasheed, W., Rashid Abdullah, T. A.,
Bin Jafaar, M. Y. 2017. Scene classification for aerial
images based on CNN using sparse coding technique.
International journal of remote sensing, 38(8-10), pp
2662-2685.
Radovic, M., Adarkwa, O., Wang, Q. 2017. Object
recognition in aerial images using convolutional neural
networks. Journal of Imaging, 3(2), pp 21.
Wei, Y., Xia, W., Huang, J., Ni, B., Dong, J., Zhao, Y.,
Yan, S. 2014. CNN: single-label to multi-label. arXiv
preprint arXiv:1406.5726.
Yu, H., Ma, Y., Wang, L., Zhai, Y., Wang, X. A landslide
intelligent detection method based on CNN and
RSG_R. Mechatronics and Automation (ICMA), 2017
IEEE International Conference on, 2017. IEEE, 40-44.
Zhang, C., Sargent, I., Pan, X., Li, H., Gardiner, A., Hare,
J., Atkinson, P. M. 2018. An object-based
convolutional neural network (OCNN) for urban land
use classification. Remote Sensing of Environment,
216(57-70.
Zhu, X. X., Tuia, D., Mou, L., Xia, G.-S., Zhang, L., Xu,
F., Fraundorfer, F. 2017. Deep learning in remote
sensing: a comprehensive review and list of resources.
IEEE Geoscience and Remote Sensing Magazine, 5(4),
pp 8-36.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
40
