
Cross-provider Platoons for Same-day Delivery
Sînziana-Maria Sebe
1 a
, Philipp Kraus
1 b
, Jörg P. Müller
1 c
and Stephan Westphal
2 d
1
Institut für Informatik, Technische Universität Clausthal, Julius-Albert Straße 4, Clausthal-Zellerfeld, Germany
2
Institut für Angewandte Stochastik und Operations Research, Technische Universität Clausthal,
Erzstraße 1, Clausthal-Zellerfeld, Germany
Keywords:
Platoon, Heterogeneous Groups, Route Matching, Group Building.
Abstract:
Platooning – vehicles travelling close together behaving as a unit – aims to improve network throughput both
on highways and in urban traffic. We study the problem of platoon formation in an urban environment us-
ing the scenario of logistic service providers equipped with fleets of autonomously driving pods to carry out
same-day delivery tasks by creating cross-provider platoons. The novelty of our work is that we investigate
the problem of cross-provider platoons, i.e., platoons with members from different self-interested logistic ser-
vice providers. Our aim is to study platoon formation mechanisms and possible benefits of cross-provider
platooning using simulation. We formulate optimal platoon formation as an integer linear optimisation prob-
lem (ILP), aiming to find the longest sub-routes to be shared between vehicles by platooning. The proposed
method was implemented and tested on a mesoscopic model to simulate platoon formation and operation, on
real network data with realistic background traffic models. Comparing our method to a simpler route matching
algorithm reveals comparable system level performance; however, our method performs better with respect to
local participant utility, i.e.appears more suited to take vehicle/provider preferences into account.
1 INTRODUCTION
With the growth of e- and m-commerce, same-day de-
livery is emerging as a desirable option for customers.
This new logistics concept has been mostly imple-
mented in hub and spoke architectures so far, where
delivery satellites are connected with hubs (Crainic,
2008), (Crainic and Sgalambro, 2014), and where last
mile delivery is performed from satellite to customer
– usually the most costly part of transport (Gevaers
et al., 2011).
Logistic service providers (LSP) usually plan and
time their deliveries in advance, in order to minimise
the driving distance while maximising the number of
orders honoured. This process is costly in computa-
tional resources and time, thus making it unviable for
same day delivery. Orders that are received should
be handled immediately, making small-sized, possi-
bly automated vehicles with little capacity a better op-
tion not only because of time constraints, but also to
achieve higher flexibility in an urban traffic environ-
a
https://orcid.org/0000-0002-9435-9879
b
https://orcid.org/0000-0003-3819-7163
c
https://orcid.org/0000-0001-7533-3852
d
https://orcid.org/0000-0002-5893-5533
ment. This creates a huge challenge for LSPs, which
are in need of new and innovative ways to success-
fully complete deliveries in busy urban traffic situa-
tions while limiting their own negative effects on it.
Recently, vehicle platooning in conjunction with
the use of automated (electric) vehicles has been ap-
pearing as a possible technology, enabling more sus-
tainable usage of road space. Starting with early
work on highway platooning (Swaroop and Hedrick,
1999) and work focusing on truck platooning and au-
tonomous vehicles (e.g. SARTRE (Robinson et al.,
2010)), a considerable body of research on platooning
has been recently conducted, including some work
studying urban environments. Yet, so far, research on
urban platooning has focused on control, stability and
operation (see e.g., (Schindler et al., 2018) (Khalifa
et al., 2018) (Ali et al., 2015)). There is also some
work that considers the use of platooning from a traf-
fic management perspective, e.g., by decreasing con-
gestions and emissions at traffic lights (e.g., (Lioris
et al., 2017)).
There is only little research focusing on applying
platooning to city logistics applications (e.g. (Scherr
et al., 2018)), and to our knowledge; no work that
studies methods for platoon formation and operation
involving vehicles operated / owned by different ser-
106
Sebe, S., Kraus, P., Müller, J. and Westphal, S.
Cross-provider Platoons for Same-day Delivery.
DOI: 10.5220/0007689601060116
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 106-116
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

vice providers, including possible benefits and disad-
vantages of these methods. For a more detailed ac-
count of the state of the art, we refer to Section 2.
Our research aims at closing this gap, and the
work described in this paper establishes a first step
to investigate benefits and trade-offs of urban cross-
provider platooning for same-day delivery. For the
scope of this paper, we assume that LSPs operate lo-
cal fleets of smaller-sized automated delivery vehicles
(Pods) which are dispatched into urban traffic. We
further assume that platooning is encouraged by traf-
fic management by offering them easier / faster pas-
sage through the network. We study methods for pla-
toon formation and operation in this context.
In order to increase the usage (and hence achiev-
able benefit) of platooning in the urban network, we
propose cross-provider platoons; that is platoons with
vehicles belonging to different LSPs. This leads to
heterogeneous groups not only as far as the destina-
tions are concerned, but also – due to the fact that
LSPs are self-interested – with respect to constraints,
preferences and valuation functions. Platoons are as-
sumed to form spontaneously in the network, and a
pod will only join a platoon if its local utility when
joining is lower than when traveling alone. Said util-
ity is hereby named costs but measured in terms of
time-savings based on traffic density.
In Section 2, we analyse the state of the art and
formulate the research gap. In Section 3, we formu-
late optimal platoon formation as an integer linear op-
timisation (ILP) problem, aiming to find the longest
possible routes to be shared between vehicles. In Sec-
tion 4, we describe a simulation system implement-
ing the proposed method, and its evaluation against
real network data with synthetic but realistic back-
ground traffic models. Preliminary results reported
in Section 5 are encouraging and show that overall
(system-level) performance of our method is com-
parable to that of state-of-the-art methods, but may
lead to higher acceptance by LSPs because it achieves
higher average local utility values. We end with a con-
clusion and outlook in Section 6.
2 STATE OF THE ART
2.1 Platoons
Platooning – multiple vehicles travelling together as
one logical unit– has been getting plenty of atten-
tion as of late, since it shows great promise for large
freight transport on a highway system (Bengtsson
et al., 2015), (Amoozadeh et al., 2015), (Biswas et al.,
2006) as far as resource usage is concerned. Platoons
take up less road space since they travel closer to-
gether than individual vehicles do, thus positively af-
fecting flow within the network and fuel consumption.
The latter is due again, to the smaller gap between ve-
hicles, which in turn reduces wind drag, leading to a
lower consumption. This is particularly effective on
highways due to the straight roads and high speeds.
Traffic management benefits of platooning have
been investigated e.g., by (Lioris et al., 2017), who
showed that platoons can increase network through-
put at urban intersections and that adapting traffic sig-
nalling to allow for the faster passing of platoons can
potentially improve overall city traffic.
With regards to urban platooning, related work fo-
cuses on models describing ways of control, ensur-
ing stability within the platoon and ways of operation
(how vehicles form, travel within and split from the
platoon). Ali et al. (Ali et al., 2015) have shown that
in order to account for curved roads, as well as vary-
ing speeds which tend to occur in an urban network
more so than in highway traffic, longitudinal control
must be decoupled from the lateral one. They pro-
pose three different models, one for each movement
type (longitudinal, lateral and platoon). Khalifa et
al. (Khalifa et al., 2018) propose a new consensus-
based longitudinal control model which is capable of
ensuring string stability even in the case of commu-
nication breakdown. Schindler et al (Schindler et al.,
2018) investigate stable and flexible platooning on ur-
ban roads. The authors propose the use of state ma-
chines, one for each aspect of the platooning logic
(platooning, forming, message, distance).
All previous papers do not address the issue of
platoon grouping, which is how the vehicles decide
whether to platoon or not and who platoons with
whom. Even when discussing joining (Schindler
et al., 2018), only the actions leading to forming
or joining the platoon are discussed, but not the
characteristics which would indicate whether join-
ing/forming makes sense.
Using platooning in the context of logistic same-
day delivery is a rather new area of study, where the
subject of network design was broached (Scherr et al.,
2018). This paper presents how a service network for
such a process could be modelled, considering mixed
autonomous platoons. The authors consider that fully
automated platoons could only be viable on certain
parts of the network, and would rely on a human
driver to navigate through the others. All vehicles,
both human-driven and autonomous belong to a sin-
gle LSP and focus on minimising the cost of delivery.
Even with this study, the subject of grouping vehicles
into platoons is not touched upon, mainly due to the
homogeneity of the vehicles, and the fact that such
Cross-provider Platoons for Same-day Delivery
107

platoons would be grouped and planned to maximise
utility in the first place.
2.2 Group Formation
When looking at group building algorithms we have
different approaches based on the field in which they
are applied. More general and largely applied meth-
ods are described in (Amir and Lindenbaum, 1998)
with algorithms solely based on recognising impor-
tant information and sorting by a particular criterion
(Havaldar et al., 1994); Wertheimers laws of group-
ing (Gordon, 2004); grouping by maximising a con-
sistency function between group assignment and data;
hierarchical grouping (Mojena, 1977); Walds SPRT
Algorithm (Wald and Wolfowitz, 1948) or simply by
maximum likelihood.
When focusing on vehicle or trips grouping there
are again multiple facets, each belonging to a spe-
cific domain. To form, maintain and dissolve a group,
communication is required; so a clear first grouping
strategy would be based on vehicles maintaining com-
munication. (Taleb et al., 2007) state in their paper
that a group can be made only by vehicles being able
to maintain a communication link and for that they
must be grouped by velocity headings. The vehicles
must all head in the same direction as well as main-
tain a constant speed within the group to avoid link
breakages due to distance. They assume a very basic
set of criteria which is not sufficient for our problem.
Kagaya et al. (Kagaya et al., 1994) present ways
to group vehicles with drivers and passengers (some
of which with special needs) while also taking into ac-
count routing and scheduling. They define their prob-
lem as a many-to-many advanced reservation travel
problem. They identified different characteristics
upon which a group could be built, namely: close-
ness of desired departure times, the location of ori-
gins and destinations, the direction of the trips, the
passenger type and trip purpose, number and capac-
ity of available vehicles. Routing and scheduling al-
gorithms often focus on the operating companies by
minimising their cost, the length of distance travelled
and the empty vehicle travel time/distance. They tend
to neglect preferences of the passengers/customers,
which should be given more importance. The algo-
rithm proposed by Kagaya works with a fuzzy rela-
tion to define similarity of trips. While not exactly the
same, a parallel can be drawn between our delivery
problem and that of Kagaya. We are less concerned
with the human factor, since our vehicles are fully au-
tomated, and we have no need to combine trips, since
pods cannot exchange packages between them.
Dennisen and Müller (Dennisen and Müller, 2016)
propose preference-based group formation through it-
erative committee elections. Passengers visiting sev-
eral points of interest need to be grouped in a ride-
sharing autonomous vehicle. They express their pref-
erences on their desired destinations and by iteratively
removing the most dissatisfied passenger using the
Minisum or Minimax approval committee rules and
recounting votes, a suitable grouping is found. In our
work, while the goal of finding the best common route
is the same, we consider packages instead of passen-
gers. Hence, the voting approach appears less obvi-
ously suited to our problem.
3 A METHOD FOR CROSS-LSP
PLATOON FORMATION
Coming back to our problem of heterogenous group
building, we need to identify the important charac-
teristics and limitations that will influence our algo-
rithm. Considering all actors in the traffic scenario,
especially logistic traffic, we get different preferences
making the problem of heterogeneity more and more
complex. We have the clients with the preference of
delivery time (delivery window), the pods themselves
which have a preferred speed, and an energy budget
they must not overdraft (length of route). Then the
different providers would want to keep the costs un-
der a certain margin, cooperate with some but not all
other competing companies, and also fulfil a certain
number of orders per time unit.
A simple implementation of a grouping algorithm
to solve our problem of heterogenous group build-
ing is to treat it as an optimisation problem based
on preferences. All the preferences mentioned above
are modelled as constraints in the optimisation prob-
lem with the objective of minimising the route costs
(thus positively affecting the time and the length of
road travelled). The algorithm proposed, presented at
length in subsection 3.4, is deterministic and provides
one or more "best" solutions.
Employing the previously presented fuzzy the-
ory approach would not be a good fit to the prob-
lem simply because the weights given to the criteria
are not constant over the different logistics service
providers. For some it might be more important to
have as many orders fulfilled as possible, thus disre-
garding platooning as long as it is not immediately
available; whereas other might prefer to wait for a
platoon instead of travelling alone. So while the set
of preferences might contain the same values for all
pods (mentioned above), their weight in the decision
making process might differ.
In the case where the optimisation problem offers
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
108

more than one similar solution (for example in a Man-
hattan grid scenario), a voting procedure, like the one
presented before, could be employed to determine the
route and the grouping of pods. This would ensure
that route selection is not left up to one entity, but
all potential platooning pods contribute to the selec-
tion. Such an approach would be a secondary decision
mechanism, a fail-safe method to determine a singular
solution.
3.1 Input
The cities network is transformed into a structure
which allows routing; a graph where streets are rep-
resented by edges and connecting points by vertices.
Traffic demand (Q(x,t))is modelled as a collection of
routes given by origin and destination pairs in the
network. This represents background traffic, more
specifically how many vehicles travel on a specific
edge(∆N) on average in an hour(∆t). (1) (Treiber and
Kesting, 2013).
Q(x, t) =
∆N
∆t
(1)
This is then transformed into traffic density (ρ(x, t)),
by dividing the number of vehicles per hour(∆N)
through the length of the edge(Σ
α
d
α
), and added on
as that specific edge’s weight (2) (Treiber and Kest-
ing, 2013).
ρ(x, t) =
∆N
Σ
α
d
α
(2)
This will act as our cost to minimise, thus being trans-
lated into time-savings; for the more free an edge is,
the faster would a vehicle transverse it. Since the pods
are electric, the longer they travel and are away from
an energy source, the higher the costs of recharging
will be in order to dispatch them again.
In the above described environment we add pods
and run the optimisation algorithm to determine their
routes. The pods have a given destination as well as a
set of preferences.
3.2 Assumptions
We assume the pods to be functioning independently
while also attempting to form a platoon. A platoon
can be formed by two or more pods. It can only form
at intersections in the network. Platoons form spon-
taneously. Pods must not only be at the same place
in order to platoon but also in the same time space.
A pod only joins a platoon if the expected platooning
cost is lower than that of travelling alone and all its
restrictions respected. After formation, pods travel in
a platoon with a uniform speed.
Short range communication must be present. The
pods communicate with a local agent which performs
the optimisation algorithm. Lastly, it communicates
the groups, common route, length and expected costs
back to the pods.
Platooning is encouraged by traffic management,
through treating platoons as one entity, exactly like
a vehicle would be. Thus, the members of a platoon
all contribute to the cost of a route. We assume the
cost of the route to be the sum of the traffic density
on all edges taken. When travelling in a platoon, all
participants contribute equally with the same amount.
This naturally reduces the cost of the whole route for
all participating pods and encourages the formation of
larger platoons.
3.3 Definitions
In Table 1 we introduce the basic symbols used in the
formalisation of the optimisation problem, and their
meaning:
Table 1: Symbols and meaning.
Symbol Definitions
G=(V, E) graph
n ∈ V vertices
e ∈ E edges, e ≡ (i, j)
d(e) traffic density of edge e
l(e) length of edge e
dest destination vertex of a pod, fixed
c(e) cost of a pod to transverse edge e
K
∗
v
costs of alone travel for pod v
Ω
v
maximum delivery time for pod v
Λ
v
maximum length of route for pod v
p(e)
v
price pod v pays for edge e
NP the number of pods in the platoon
3.4 Optimisation Problem
The goal of the optimisation problem is to have the
longest overlapping route for all pods, all the while
taking into account their particular preferences. This
can be written as an adapted shortest path problem.
min
∑
(i, j)∈E
x(i, j) ∗ c(i, j)
x(i, j) ∈ 0, 1∀edge (i, j)
∑
j
x(i, j)−
∑
j
x( j, i) =
1 ⇐⇒ i = Origin
−1 ⇐⇒ i = Destination
0 otherwise.
The variable x indicates whether the edge denoted
by the vertices i and j is used in the shortest path
Cross-provider Platoons for Same-day Delivery
109

(value of one) or not (value of zero). The three cases
represent the flow constrain which ensures that the
route flows through intermediary vertices. Then the
objective function reduces the costs to a minimum.
In the case of platooning, we have to add in a new
variable to cover all routes for all pods, namely y.
Much like x it will have the value of one if it is in-
cluded in the route of any pod, or zero if it is not. This
is the variable that replaces x in the objective function.
The flow constraint remains the same, and we add one
more to ensure that y takes the value of one only when
one or more x for that specific edge has the value of
one.
This leads us to the formulation of the platooning
optimisation problem:
Given a group of pods Pods, being at the same
vertex O in the graph at the same time; let the routes
for all the pods be given by y(i, j), and the individual
pod routes by x(i, j)
v
where
min
∑
(i, j)∈E
y(i, j) ∗ d(i, j)
y(i, j), x(i, j) ∈ {0, 1}, ∀edge (i, j)
x(i, j)
v
≤ y(i, j)∀edge (i, j), ∀pod v
∑
j
x(i, j)
v
−
∑
j
x( j, i)
v
=
1 ⇐⇒ i = O
−1 ⇐⇒ i = dest
v
0 otherwise.
∀v ∈ Pods, ∀(i, j) ∈ E
Preferences are modelled as restrictions in the op-
timisation problem, so in addition to the base problem
presented previously, one could add
∑
(i, j):x(i, j)
v
=1
c(i, j)
v
≤ K
∗
v
, ∀ pod v, cost restric-
tions
∑
x(i, j)
v
=1
l(i, j) ≤ Λ
v
∀pod v, length of route re-
strictions
∑
x(i, j)
v
=1
l(i, j)
s
≤ Ω
v
∀pod v, time restrictions
(delivery-window)
and so on.
To incentivise the pods to form a platoon we
grant vehicles a reduction in costs; the more pod in
a platoon, the lower the cost of the edge is. In this
paper’s case, it is equal across all pods forming the
platoon. Therefore we get
p(i, j)
v
=
c(e)
NP
∀pod v
p(i, j)
v
≥ 0 ∀vehicle v and edge (i, j)
and the previous cost restriction becomes
∑
(i, j):x(i, j)
v
=1
p(i, j)
v
≤ K
∗
v
, ∀ pod v.
4 SIMULATION
4.1 Overall Architecture
The simulation kicks off with loading the environ-
ment and starting the internal clock. Then the pods
would be generated, either at specific locations (de-
livery satellites) or random ones, given a destination
and a set of characteristics and preferences. The pods
follow the best route toward their destination while
also attempting to build platoons. If pods/ pods and
a platoon/ platoons, meet at the same vertex, they
communicate their destination and preferences to a
centralised agent situated at that vertex, which runs
the aforementioned optimisation algorithm. Alterna-
tively, a pod may choose to wait to form or join a
platoon, and communicates the necessary information
upon arrival at the vertex. The algorithm provides
the groups, common route and expected costs for all
pods.
After the pods are grouped in a platoon, they fol-
low the common route until its end, then disband and
continue toward their destination. To accommodate
the fickle nature of urban traffic, the platoon may be
re-routed at each intermediary vertex. The simulation
ends when all pods have successfully reached their
destination.
4.2 Implementation
To execute and run the program, a simulation was
built using Java. For each of the components of
the simulation an appropriate framework was found
and used. For the environment we used Jung
(O’Madadhain et al., 2018) a powerful and flexible
library to model data into a network or a graph. It
comes with routing and analysis algorithms, as well
as additional libraries for visualisation purposes. To
help with visualisation of the routes, we use a heat
map. This is built using colour maps, kindly provided
by (Kraus, 2018). A JXMapViewer2 (Steiger, 2012)
painter was defined, based on existing examples, to
draw the routes.
The optimisation method is executed using the
commercial solver Gurobi (Gurobi, 2018), chosen
since it can be easily introduced in a Java program
as a Jar file. The process of defining the problem goes
as follows; at first, the optimisation environment and
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
110
model are defined. Based on the number of pods in
our theoretical platoon, several x’s as well as one y
are defined as binary variables for each of the edges
in the graph. When creating the y variables, the ob-
jective function is also defined. The next step is to
add the constraints; first is the flow constraint, which
is defined for each of the pods; then the x ≤ y con-
straint, and lastly, whichever preference constraints
the user deems as necessary. In the infancy stages of
the project we just used the length constraint, forcing
pods to not take detours longer than a given coeffi-
cient × their ideal shortest path. The model is then
optimised, the results saved into another data struc-
ture and the model then made redundant. The results
can be displayed anytime by calling the display func-
tion.
In order to be able to compare our optimisation
approach with a state-of-the-art alternative, we con-
ceived a baseline algorithm, which creates an overlap
of all the pods’ best routes. Assuming the current po-
sition of the pods as the origin point, the best (fastest)
route is identified with a normal routing algorithm.
After a route has been found for all pods, they are ag-
gregated, and the number of times an edge appear in
a route, counted. This gives the number of pods per
edge, giving a crude approximation of where a pla-
toon could form and who could be a part of it. This
approach is fairly straightforward and easy to calcu-
late, but does not take into account all the possible
restrictions and preferences that may arise.
4.3 Simulation Settings and Input Data
The data acting as the environment for our sim-
ulation can be found at https://github.com/bstabler/
TransportationNetworks (Stabler et al., 2018). We fo-
cused on the Berlin neighbourhoods since they were
the most finely granular example provided. The net-
work was transformed into a Json file respecting a
Json schema defined for this specific purpose.
Traffic demand was not given along with the net-
works but had to be generated based on trips between
given zones. The vertices were divided into zones
which were provided in the trips file. To simulate the
trips given, random vertices were pulled from each
zone and then the best route between them calculated.
For example, if there were 14 trips from zone 1 to
zone 8, the process would be as follows: pull a ran-
dom vertex from zone 1, pull a random vertex from
zone 8, route, save the edges taken. Repeat this pro-
cess for another 13 times. All the resulting routes
were aggregated and divided by the edges’ length giv-
ing us the traffic density which is then added in the
form of edge weights to the environment. The results
from this process are not constant, but they are similar
enough to be consistent throughout the runs.
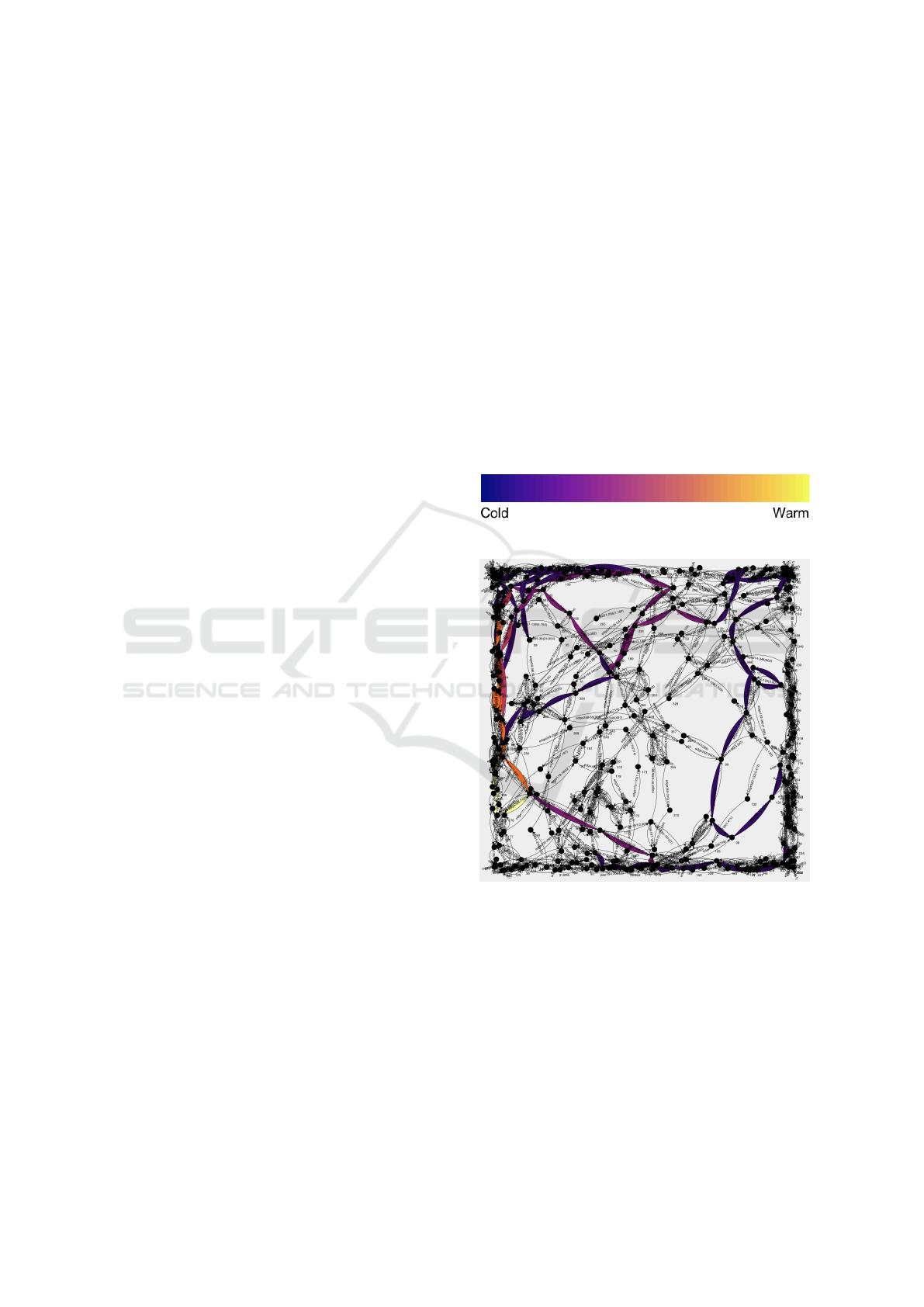
4.4 Simulation Output
A simulation run delivers two types of outputs. The
first is a visualisation of the network, with edges
painted to represent how many pods travel on them,
in the form of a heat map. The colour range cho-
sen to display the heat map was the Inferno palette
since the spectrum (yellow for hot to dark purple for
cold) is uniformly perceived and understood by the
human eye. (Thyng et al., 2016) Thus, a light yellow
coloured edge would indicate that all pods would use
that edge, whereas a dark purple edge would mean
that it is a part of only one pods’ route. An edge with
no colour means that it is not used in any of the routes.
Figure 1: Heat scale.
Figure 2: Route for a ten pod platoon, on real Berlin net-
work. For legend see Figure 1.
The second output is a log file consisting of six
parts:
1. the origin and destination vertices. These are
given to help with the understanding and interpre-
tation of results.
2. the routes of individual pods. Since the individual
route is also given by the optimisation function;
the list of xs with the value one is displayed for
each of the pods/destinations.
Cross-provider Platoons for Same-day Delivery
111

3. the route of the fleet. The ys with the value of one
are also displayed, thus rendering the route of the
whole fleet.
4. the number of pods per edge. For each of the
edges displayed in step three, we get the number
of pods which would travel it.
5. the cost savings. For each of the destinations,
the original costs (travelling alone) are displayed
along with the new costs if the pods were to pla-
toon how the optimiser suggests.
6. the system optimal solution costs, i.e. the sum of
the weights of all edges mentioned in step three.
The baseline algorithm follows the same structure,
creating first a heat map visualisation of the network
and then presenting written results following the same
6 step pattern as before.
5 RESULTS
Experiments were run on a set of real and syn-
thetic environments using both realistic and gener-
alised background traffic density. For the real envi-
ronments we used the Berlin networks mentioned in
Chapter 4 coupled with realistic traffic density data.
For the synthetic environments a simple five by five
vertex Manhattan grid was created with higher traffic
density on the outside edges and lower in the center
of the network. The algorithm was run both with and
without restrictions (preferences), in our experiments
case length of route and cost restrictions, performing
well. All common routes could be determined and the
number of pods in the platoon specified.
When studying the resulting heat maps, one can
easily identify potential split and also join points in
the routes. Whenever the colour changes to colder
it means pods would leave the platoon and whenever
it would get warmer, pods would potentially join the
platoon. For ease of visualisation and understand-
ing, the remaining figures exemplifying results will be
shown on a smaller synthetic environment with lower
edge weights in the center and higher on the outside.
To identify join points, we must assume that two
groups of pods are platooning from different origins
and spontaneously meet at a different vertex in the
network. If their routes have a common set of edges,
they may choose to form an even larger platoon. To
illustrate we have the following example presented in
figures 4, 5 and 6. Each of the problems has a sepa-
rate instance of the optimisation algorithm set as their
route, and upon meeting, would run another one to
determine the combined platoon.
Figure 3: Route for five pods, synthetic network, featuring
split points. For legend see Figure 1.
Figure 4: Route for five pods, synthetic network, starting
vertex 0. For legend see Figure 1.
We can see that the two problems (Figures 4 and
5), have edges 7-8 and 8-9 in common, so vertex 7
could act as a join point. Here a four pod platoon
could be created, with two pods pertaining to the pla-
toon starting from vertex 0 and two other from the
platoon starting from vertex 2 (Figure 6).
5.1 Comparison to Baseline Algorithm
To illustrate this we go back to our real-life example
of the Berlin Tiergarten neighbourhood. To mimic
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
112

Figure 5: Route for five pods, synthetic network, starting
vertex 2. For legend see Figure 1.
Figure 6: Route for ten pods, synthetic network, two start-
ing vertices, featuring join point. For legend see Figure 1.
real traffic, we assumed the pods would meet at the
most popular intersection (where most traffic takes
place) and considered that our origin point. For the
destinations, we selected the vertices where the sub-
traction of entering and exiting vehicles was the low-
est. With these origin-destination pairs we performed
both algorithms and studied their results as far as costs
are concerned. In Table 2 the results are presented; the
first column denotes how many pods meet and could
platoon, the second and third column present the over-
all costs for the overlapping and optimiser algorithms
respectively. The fourth column presents the pods,
and the last four columns show their costs; if they
were to travel alone, platooning by the overlapping
solution, platooning by the optimiser solution, and fi-
nally the cost of the tour with the optimiser solution
without the platooning incentives.
In some cases, especially for smaller platoons, the
algorithms deliver the same solution, like the case
presented with six pods. With eight or ten pods we
see how the optimisation algorithm produces a bet-
ter solution than the simplistic algorithm. This is
due to the fact that the resulting route from the op-
timiser presents the system optimal solution; provid-
ing the longest, but most cost-efficient common route
of the pods. When looking into the simple overlap-
ping example, we get the pod specific optimal solu-
tion, which is to be expected.
We can also see, in the case of pod v8 for both
of the last cases, that in our optimiser approach it is
included in a platoon, whereas for the overlapping one
it travels alone.
Although one can see that the overlapping solu-
tion provides more cost savings for individual pods,
its simplistic method would not be suitable as a com-
plete solution, since the preferences cannot be mod-
elled in. The optimiser approach treats preferences as
restrictions on the system and would provide a more
complete solution to the platooning problem.
5.2 Runtime Performance Analysis
As far as performance of the algorithm is concerned,
the runtime increases exponentially with the number
of pods as expected, but due to the nature of our sce-
nario this bears little importance. In a traffic scenario
where the pods must be close in both space and time,
we do not foresee more than twenty individual pods
forming a platoon. In the case where more platoons
would join forming a larger one, they still act as in-
dividual pods, thus keeping the optimisation problem
small. Even though the optimisation approach is sub-
stantially slower, it still performs within an acceptable
margin of 23 seconds for fifty pods. For a more realis-
tic scenario of five or ten pods, it performs in 2.8 and
3.7 seconds respectively.
In Figure 7 both algorithms’ performance is por-
trayed, with each point representing the runtime of
one instance of the optimisation problem / overlap-
ping algorithm respectively for the number of vehicles
specified.
Cross-provider Platoons for Same-day Delivery
113
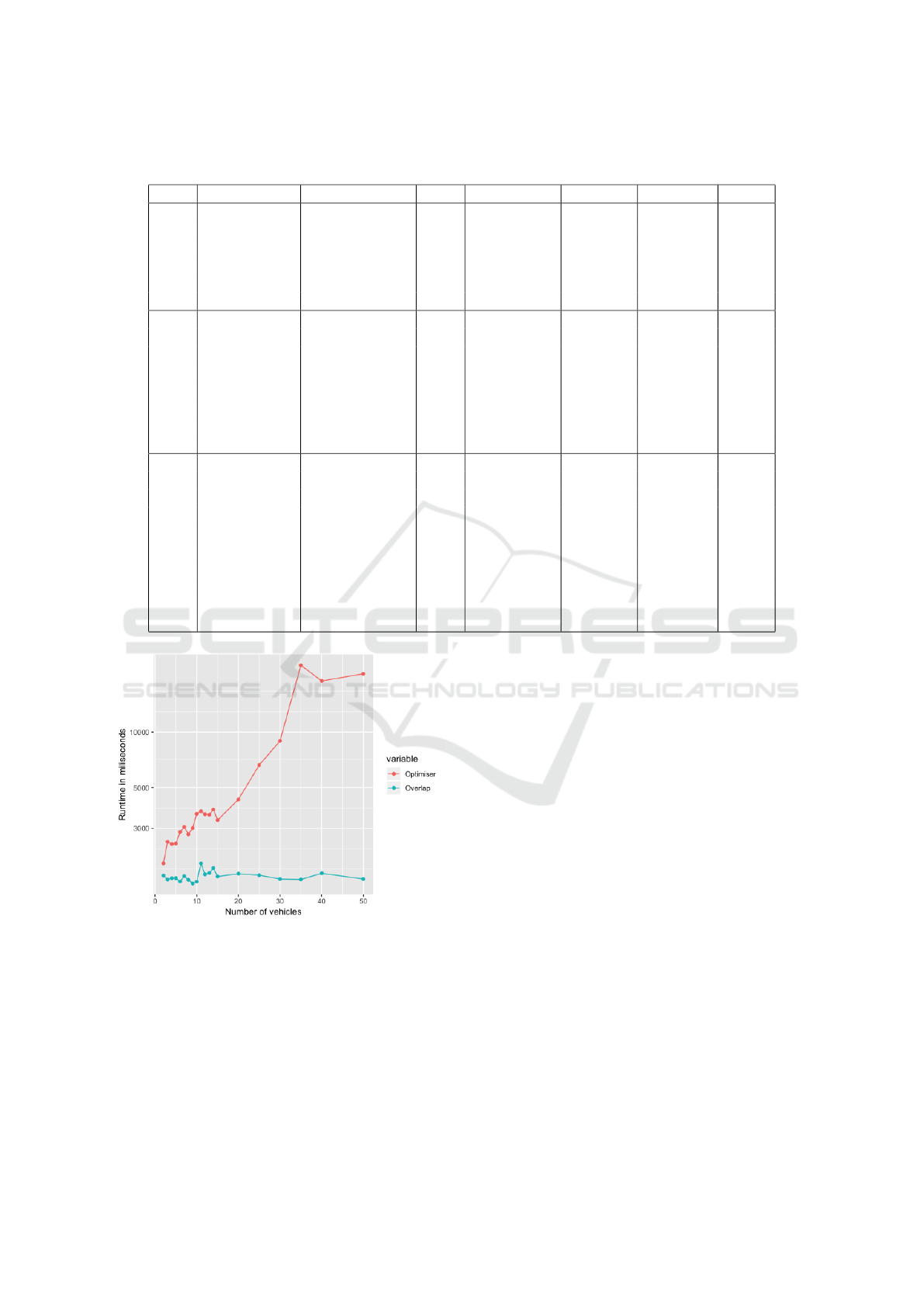
Table 2: Resulting costs comparison of the two algorithms. Costs represented in traffic density, measured in number of
vehicles per length unit of the edge.
Pods Total Overlap Total Optimiser Pods Alone-travel Overlap Optimiser Tour
6 51954 51954 v1 3510 1010.58 1010.58 3510
v2 4818 2318.58 2318.58 4818
v3 5765 3508.58 3508.58 5765
v4 16578 16329.5 16329.5 16578
v5 30702 28538.25 25538.25 30702
v6 497 248.5 248.5 497
8 75103 73161 v1 3510 773.75 880.3 3510
v2 4818 2033.25 3265.5 6868
v3 5765 3352.75 3378.3 5765
v4 16578 16329.5 16329.5 16578
v5 30702 28394 28408 30702
v6 497 248.5 248.5 497
v7 16330 13545.25 13700.3 16330
v8 10426 10426 6950.5 10553
10 119682 98455 v1 3510 677.58 880.3 3510
v2 4818 1937.08 3265.5 6868
v3 5765 3256.58 3378.3 5765
v4 16578 16274.3 5484 16578
v5 30702 24762.83 28408 30702
v6 497 193.3 124.25 497
v7 16330 13449.08 13700.3 16330
v8 10426 10426 6950.5 10553
v9 25113 24892 11066.38 27742
v10 29752 23812.83 25186.58 41862
Figure 7: Comparing the two performances.
5.3 Discussion
Overall the algorithm performs well and gives a vi-
able route and a possible grouping for the pods to
platoon. It provides the system optimal route, which
may not guarantee the best individual cost savings for
the pods, but a substantial cost saving nevertheless.
When dealing with a heterogenous group, an individ-
ual optimal solution would most likely mean that the
pod is not part of the group, and since costs are equal
across all pods, the system optimum is the individual
optimum as well. The optimisation method is simple,
easy to understand and to use, however it may prove
to be slow when comparing to other more novel ap-
proaches. It makes up for it though, by being a very
straight forward and precise way of including prefer-
ences into the routing and grouping algorithm.
The next steps of this research, are to complete
this program creating a fully functioning simulation,
including discreet time and moveable pods in the en-
vironment. With the inclusion of time, more restric-
tions can be added (such as delivery windows and
speed) thus adding another degree of realism to the
results. To further improve on the accuracy of the sim-
ulation, we plan on using more real cities with exact
visualisation by means of Graphhopper (Karich et al.,
2018)and Open Street Map (OpenStreetMap, 2018).
This information is readily available and easy to im-
plement but traffic density data is scarce and hard to
find.
This application will then be further developed
into a fully fledged agent-based simulation of urban
logistic traffic, which is immensely useful in the fur-
ther research on urban platooning.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
114

6 CONCLUSION
Using self driving electric vehicles to carry out pack-
age deliveries in cities is a logical next step for lo-
gistic companies. Not only do they cut costs on em-
ploying human drivers, but they also cut down on
harmful emissions in an already polluted environ-
ment. Given that these vehicles are small for the time
being, they can only carry one or very few packages
in one trip. Having many such vehicles swarming an
already overcrowded network would be chaotic and
confusing, so for their sake as well as the general traf-
fic, they could form platoons and travel in a convoy.
To ensure that groups are formed, all pods are vi-
able for platooning, but can impose certain limita-
tions, whether they are characteristics (such as speed),
restrictions (must arrive at their destination by a spe-
cific time) or preferences (would platoon with some
but not all other pods).
This paper presents a simple and flexible algo-
rithm in order to create cross-provider platoons of au-
tonomous electric pods used for same day delivery.
Routing and grouping are handled by an optimisation
problem, treating features and preferences as restric-
tions. The objective function is minimising the pla-
toons cost, which is modelled as traffic density for
each edge transversed. The aforementioned charac-
teristics and limitations are represented by linear con-
straints. This offers more freedom to add or limit the
system without much difficulty, all the while main-
taining a clear and optimal result.
The program performs well and is accurate even
with a large number of vehicles, giving not only the
route of the platoon, but each individual pods route as
well.
ACKNOWLEDGMENTS
This work has been funded by the Deutsche
Forschungsgemeinschaft (DFG, German Research
Foundation) under Grant 227198829 / GRK1931.
The focus of the SocialCars Research Training Group
is on significantly improving the city‘s future road
traffic, through cooperative approaches. The first au-
thor gratefully acknowledges helpful discussions with
Prof. Dirk Mattfeld, and the help of Nelly Nyeck
Mbialeu Nicaise in the data transposing process.
REFERENCES
Ali, A., Garcia, G., and Martinet, P. (2015). Urban pla-
tooning using a flatbed tow truck model. In Intelligent
Vehicles Symposium (IV), 2015 IEEE, pages 374–379.
IEEE.
Amir, A. and Lindenbaum, M. (1998). A generic grouping
algorithm and its quantitative analysis. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
20(2):168–185.
Amoozadeh, M., Deng, H., Chuah, C.-N., Zhang, H. M.,
and Ghosal, D. (2015). Platoon management with co-
operative adaptive cruise control enabled by vanet. Ve-
hicular communications, 2(2):110–123.
Bengtsson, H. H., Chen, L., Voronov, A., and Englund,
C. (2015). Interaction protocol for highway platoon
merge. In Intelligent Transportation Systems (ITSC),
2015 IEEE 18th International Conference on, pages
1971–1976. IEEE.
Biswas, S., Tatchikou, R., and Dion, F. (2006). Vehicle-
to-vehicle wireless communication protocols for en-
hancing highway traffic safety. IEEE communications
magazine, 44(1):74–82.
Crainic, T. G. (2008). City logistics. In State-of-the-Art
Decision-Making Tools in the Information-Intensive
Age, pages 181–212. INFORMS.
Crainic, T. G. and Sgalambro, A. (2014). Service network
design models for two-tier city logistics. Optimization
Letters, 8(4):1375–1387.
Dennisen, S. L. and Müller, J. P. (2016). Iterative commit-
tee elections for collective decision-making in a ride-
sharing application. In ATT@ IJCAI.
Gevaers, R., Van de Voorde, E., and Vanelslander, T.
(2011). Characteristics and typology of last-mile lo-
gistics from an innovation perspective in an urban
context. City Distribution and Urban Freight Trans-
port: Multiple Perspectives, Edward Elgar Publish-
ing, pages 56–71.
Gordon, I. E. (2004). Theories of visual perception. Psy-
chology Press.
Gurobi (2018). Gurobi optimization.
Havaldar, P., Medioni, G., and Stein, F. (1994). Extraction
of groups for recognition. In European Conference on
Computer Vision, pages 251–261. Springer.
Kagaya, S., Kikuchi, S., and Donnelly, R. A. (1994). Use
of a fuzzy theory technique for grouping of trips in
the vehicle routing and scheduling problem. European
Journal of Operational Research, 76(1):143–154.
Karich, P., Schröder, S., and Zilske, M. (2018). Graphhop-
per.
Khalifa, A., Kermorgant, O., Dominguez, S., and Mar-
tinet, P. (2018). Vehicles platooning in urban envi-
ronment: Consensus-based longitudinal control with
limited communications capabilities. In International
Conference on Control, Automation, Robotics and Vi-
sion.
Kraus, P. (2018). Colormap.
Lioris, J., Pedarsani, R., Tascikaraoglu, F. Y., and Varaiya,
P. (2017). Platoons of connected vehicles can double
throughput in urban roads. Transportation Research
Part C: Emerging Technologies, 77:292–305.
Mojena, R. (1977). Hierarchical grouping methods and
stopping rules: An evaluation. The Computer Jour-
nal, 20(4):359–363.
Cross-provider Platoons for Same-day Delivery
115

O’Madadhain, J., Fisher, D., and Nelson, T. (2018). Jung,
java universal network/graph framework.
OpenStreetMap (2018). Open street map.
Robinson, T., Chan, E., and Coelingh, E. (2010). Operating
platoons on public motorways: An introduction to the
sartre platooning programme. In 17th world congress
on intelligent transport systems, volume 1, page 12.
Scherr, Y. O., Neumann-Saavedra, B. A., Hewitt, M., and
Mattfeld, D. C. (2018). Service network design for
same day delivery with mixed autonomous fleets.
Transportation research procedia, 30:23–32.
Schindler, J., Dariani, R., Rondinone, M., and Walter, T.
(2018). Dynamic and flexible platooning in urban ar-
eas. In AAET Automatisiertes und vernetztes Fahren
conference 2018.
Stabler, B., Bar-Gera, H., and Sall, E. (2018). Transporta-
tion networks for research.
Steiger, M. (2012). jxmapviewer2 github.
Swaroop, D. and Hedrick, J. K. (1999). Constant spacing
strategies for platooning in automated highway sys-
tems. Journal of dynamic systems, measurement, and
control, 121(3):462–470.
Taleb, T., Sakhaee, E., Jamalipour, A., Hashimoto, K.,
Kato, N., and Nemoto, Y. (2007). A stable routing pro-
tocol to support its services in vanet networks. IEEE
Transactions on Vehicular technology, 56(6):3337–
3347.
Thyng, K. M., Greene, C. A., Hetland, R. D., Zimmerle,
H. M., and DiMarco, S. F. (2016). True colors of
oceanography: Guidelines for effective and accurate
colormap selection. Oceanography, 29(3):9–13.
Treiber, M. and Kesting, A. (2013). Trajectory and floating-
car data. In Traffic Flow Dynamics, pages 15–18.
Springer.
Wald, A. and Wolfowitz, J. (1948). Optimum character of
the sequential probability ratio test. The Annals of
Mathematical Statistics, pages 326–339.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
116
