
In-Vehicle IoT Platform Enabling the Virtual Sensor Concept:
A Pothole Detection Use-case for Cooperative Safety
Ilaria Bosi, Enrico Ferrera, Daniele Brevi and Claudio Pastrone
LINKS Foundation – Leading Innovation & Knowledge for Society, Turin, Italy
Keywords: Pothole Detection, IoT Platform, Virtual Sensor, Automotive, Intelligent Transportation System (ITS),
Autonomous Vehicle, Smartphone, 6LoWPAN Sensor, Inertial Measurement Unit, Accelerometer.
Abstract: Nowadays the number of on-board sensors increases continuously due to their benefits in many different
areas, such us driving efficiency, maintenance, autonomous driving, etc. Usually the vehicle itself and its
users are those which take direct advantage from these benefits. By leveraging Internet-of-Things (IoT)
technologies, it is possible to abstract data and functionalities provided by on-board sensors and actuators
exposing relevant services outside the vehicle to external cloud-based applications and other vehicles. With
these technologies the vehicle is thus transformed in an IoT object which can be part of external IoT
platforms. This work focuses on the design and implementation of an in-vehicle IoT platform which
exposes internal functionalities as IoT services enabling also the concept of “Virtual Sensor”, which
leverages sensor fusion techniques to provide enhanced services combining raw data coming from on-board
devices. This IoT platform solution is validated through a use case in which virtual real-time pothole
detection sensor is implemented to evaluate the road surface conditions. In such use-case, multi-source
sensing information - coming from 6LoWPAN sensors as well as Smartphones and Inertial Measurement
Units - is fused, enabling IoT applications such as cooperative safety and early road maintenance.
1 INTRODUCTION
Today’s autonomous driving applications are relying
on autonomous vehicle systems in which the needed
information is gathered, processed and analysed on
the vehicles themselves. Automated vehicles largely
rely on on-board sensors (LiDAR, radar, cameras,
sensors…) or interconnects surrounding sensors
(cameras, traffic light radars, road sensors…) to
detect the environment and make autonomous cars a
full entity in the IoT eco-system. This paper is based
on the use cases carried out during the European
project AUTOPILOT (Ertico, 2017), that focuses on
utilizing the IoT potential for automated driving and
making data from autonomous cars available to the
Internet-of-Things. In this way the Automated
vehicle systems consist of inputs from a large variety
of sensors, data signal condition and decision making
by central or edge processing units and outputs to a
large variety of actuators. The overall objective is to
bring together relevant knowledge and technology
from the automotive and the IoT value chains in
order to develop IoT-architectures and platforms
which will bring Automated Driving towards a new
dimension. In order to demonstrate how additional
IoT sensors placed in the AUTOPILOT prototype
can enhance the functions of the car itself, the
vehicle can be used for example as an IoT sensor for
detecting the surface condition for both highway and
urban scenarios.
Smart sensors and actuators in the vehicles, roads
and traffic control infrastructures collect a variety of
information to serve enhanced automated driving,
while considering the timing, safety and security
constraints (Maag et al., 2012).
Road surface anomalies, such as potholes, speed
bumps, railroad crossing and joints, can determine
some problems for vehicles and can affect road users
safety. Road quality assessment plays a key role in
infrastructure management and it is useful to an
adequate allocation of road maintenance operations
(Mukherjee and Majhi, 2016).
A pothole refers to a shallow pit on a road’s
surface, caused by activities like erosion, weather,
traffic and some other factors. Detecting and hence
avoiding potholes may reduce the fuel consumption,
wear-tear and maintenance cost of a vehicle. With
the availability of information regarding the road
232
Bosi, I., Ferrera, E., Brevi, D. and Pastrone, C.
In-Vehicle IoT Platform Enabling the Virtual Sensor Concept: A Pothole Detection Use-case for Cooperative Safety.
DOI: 10.5220/0007690602320240
In Proceedings of the 4th International Conference on Internet of Things, Big Data and Security (IoTBDS 2019), pages 232-240
ISBN: 978-989-758-369-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

conditions, road users can be cautious about or avoid
the bad spots (Langle and Dantu, 2009), in addition,
Autonomous vehicles can make the right manoeuvres
to avoid potholes or other dangerous situations. It is
desirable to have a mechanism for detecting the
condition of roads and get them repaired as soon as
possible. As a result, working on monitoring road
conditions has gained significant attention in recent
time.
Related with the concept of Fog Computing,
since there is no sensor on the vehicle that
"physically" detects the roadway potholes, it is
thought to use a combination of sensors that can
already be integrated into the Original Equipment
Manufacturer (OEM) dispositive (e.g.
accelerometers, gyroscopes, etc.) or use sensors from
external devices to be placed on-board (e.g.
smartphones, cameras, external accelerometers, etc.)
to recover the same type of data (acceleration,
orientation, etc.) (De Silva et al., 2013).
This study proposes a pothole detection method
based on the in-vehicle platform that will act as a
“virtual sensor” for vibration. The information can be
taken by 1) a 6LoWPAN sensor, 2) a
smartphone/tablet or 3) an Inertial Measurement Unit
(IMU). The “virtual sensor” can work with only one
source of information or combines different sources.
The accelerometer data is normalized and is adopted
in the pothole detection algorithm to obtain the
pothole information (interpolation with global
positioning system (GPS) data). When a pothole is
detected, a message is sent to the OneM2M cloud
platform (Scarrone, 2016) where it is available for all
the other vehicles and services. The proposed real-
time pothole detection method based on mobile
sensing includes three main steps: (1) accelerometer
data normalization, (2) pothole detection algorithms,
and (3) pothole location determination.
Till now, smartphones used for road condition
monitoring, is limited to recording of accelerations,
processing them to discern potholes and monitoring
the overall condition of road surfaces. Therefore, the
data must be pre-processed before it can be used.
This can be done for example by using a passband
filter. It removes low and high frequencies from the
measured data. This makes the data much cleaner
and easier to process. Data can also be divided into
small segments and normalized to some specific
scale to make the feature extraction and classification
easier (Aksamit and Szmechta, 2011).
Our main goals are to classify road surfaces and
further evaluate road conditions. Two basic
categories for describing the road surface has been
defined: smooth roads and rough roads (roads
containing surface anomalies). A smooth road offers
a high-quality driving surface to vehicles traversing
over it, while a rough road is its complement.
The study begins with a general overview of the
different already implemented methods for the
detection of the road bumps, followed by the
presentation of IoT platform on board vehicle
implemented in AUTOPILOT project. Then the core
of this work related to pothole detection is described
and the developed algorithms with the procedures
adopted in the tests are presented. Finally, the
discussion of the first results obtained and the
conclusions of the entire work are proposed.
2 STATE OF THE ART
With the increasing popularity of new road
technologies and smartphones among people,
researchers are showing interest in building smart
IoT solutions using smartphones (because of the
embedded sensors, like a GPS, accelerometer,
gyroscope or magnetometer) or other image
recognition methods in order to monitoring overall
condition of road surfaces and improve the driving
safety.
An image processing approach was proposed by
Danti et al., (2012)
where the potholes are first
photographed or recorded using camera on a car. The
algorithm that process these images of the road,
represents the pothole as a distinct black colour.
Also Mertz (Mertz, 2011) uses light sensor and a
camera mounted on vehicles (equipped with GPS) to
detect road damages. The data is collected from
many vehicles, aggregated and analysed at a central
location and the assessment results are displayed
interactively to facilitate road maintenance
operations.
A similar approach was provided by
(Balakuntala and Venkatesh, 2013): the system
comprises a laser sensor and pressure sensors in
shock absorbers to detect and quantify the intensity
of a pothole, a centralized server which maintains a
database of locations of all the potholes which can be
accessed by another unit inside the vehicle.
In a recent study (Jothi et al., 2010), the potholes
and the hump locations are detected using GPS,
GSM and Ultrasonic sensor, to alert the driver,
reduce the vehicle speed decreasing the accident
impact and consequently the vehicle damage. One
database server collects the information about the
potholes and humps and the information are sent to
government authorities through the TCP protocol.
Regarding the use of smartphones, Wang et al.,
(2015) proposes a pothole detection method based on
In-Vehicle IoT Platform Enabling the Virtual Sensor Concept: A Pothole Detection Use-case for Cooperative Safety
233
the mobile sensing (G-sensors and GPS) and shares
the pothole information with road users and
government. The accelerometer data is normalized
by Euler angle computation and is adopted in the
pothole detection algorithm to obtain the pothole
information.
In a different study (Astarita et al., 2012), the
accelerometer of five different devices (all placed in
a test vehicle in three different placement conditions)
is used for detecting surface conditions, using three
different filters to analyse acceleration signals.
Moreover, verification of the rate of false detections
and undetected road anomalies is planned, using
georeferenced photos that allow the correct
localization on the map and the assessment of the
correspondence between the elements, detected with
the accelerometer, and real road conditions. Also
Kalra et al., (2014) used data from smartphone
accelerometer sensor: various thresholds are set and
used for distinguishing and classifying various
driving events and road anomalies.
The accelerometer sensor and navigation system
interfaced microcontroller based embedded device
mounted inside the vehicle works as a pothole
inspector which updates the database on instant basis
for every single experienced pothole (Aniket and
Vivek, 2016).
A recent study (Akinwande et al., 2015) proposed
a real-time pothole detection and traffic monitoring
system and has been able to harness smartphone
sensors to solve a global challenge, applying
Machine Learning to a real world problem and
developing a scalable and reliable system driven by
the power of crowdsourcing.
Jakob Eriksson (Eriksson et al., 2008) have
proposed The Pothole Patrol: this system uses the
inherent mobility of the participating vehicles,
opportunistically gathering data from vibration and
GPS sensors (3-axis accelerometers and GPS sensors
mounted on the dashboard of cars) and processing
the data to assess road surface conditions. It not only
identifies potholes but also differentiate potholes
from other road anomalies.
Another method (Bhoraskar et al., 2012) uses
Smartphone sensors for traffic state monitoring and
detection of bumps. This system reorients the phone
in two steps using accelerometer and magnetometer.
The accelerometer sensor data is classified using k-
means clustering algorithm into two classes which is
labelled manually as either smooth or bumpy (for
bump detection) and brake or not (for braking
detection). This labelled data is used to train Support
Vector Machine (SVM) for classification of data
points during test phase for vehicle state prediction.
Also Bhatt et al., (2017) assess roads using
gyroscope and accelerometer sensors in the phone,
training SVM models to classify road conditions with
93% accuracy and potholes with 92%. Then, the
classification results are used to create data-rich
maps that illustrate road conditions across the city.
Nericell (Mohan et al., 2008) focuses specifically
on an array of sensors; accelerometer, microphone,
GSM radio, and/or GPS sensors are used to detect
potholes, bumps, braking, and honking. They also
proposed a method to virtually reorient a disoriented
accelerometer and to use multiple sensors in tandem,
with one triggering the other, to save energy.
Mednis et al., (2011) describes accelerometer
data based on different Android smartphones, for
pothole detection algorithms deployed on devices
with limited hardware/software resources. They have
proposed four algorithms for detection of potholes in
real-time and for off-line post-processing of data.
3 IN-VEHICLE IOT PLATFORM
Thanks to AUTOPILOT’s aim, the IoT eco-system
will involve vehicles, road infrastructure and
surrounding objects in the IoT, with a particular
attention to safety critical aspects of automated
driving.
Extending the work described in (Ferrera et al.,
2017), the IoT in-vehicle platform of the
AUTOPILOT’s Italian Pilot Site is a modular
software including Application Container and
Communication System, which are deployed on the
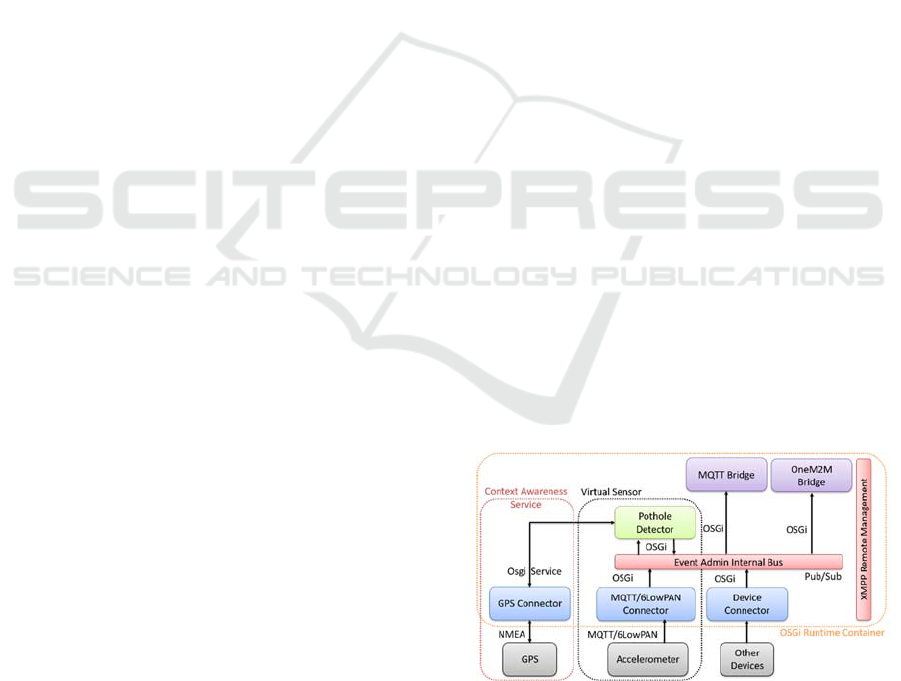
On Board Unit (OBU) inside the vehicle. The
“Runtime Environment” part of the OBU is
composed by several software modules, as showed in
Figure 1.
Figure 1: Italian IoT in vehicle platform AUTOPILOT
project.
The functionality of Remote Management is
implemented by a software (OSGi remote
management tool) (Ferrera et al., 2017), that allows
IoTBDS 2019 - 4th International Conference on Internet of Things, Big Data and Security
234

to configure the platform by adding/removing
bundles, introducing the idea of remote monitoring
and control of external application based on OSGi
platform. Through the Event Admin Internal Bus the
connectors have the same communication interface
to the bundles which they interfaced in the
Application Container.
The Application Container also encase the
functionality of Data Management, with the modules
implementing a Local Dynamic Maps (LDM) and the
Pothole Detector. LDM is a database that achieves
integrated management of static digital map
information and dynamic object information such as
the one coming from vehicles (functional
requirement of Context Awareness). The bundle of
Pothole detector represents the implementation of
the pothole detection algorithm. It is based on data
fusion techniques in order to implement the concept
of "virtual sensors". This module collects data from
multiple sensors on the vehicle (IoT in-vehicle
components or OEM in-vehicle components),
processes the various data and sends the results of
this elaboration to the cloud OneM2M platform or
Road Side Units or other vehicles (via
communication system).
Regarding the IoT device adaptation, it is planned
to support different IoT communication protocols
with the devices: the IoT connector are used to
integrate with 6LoWPAN data coming from
additional IoT devices (i.e. Inertial sensors), that are
used by edge applications on the OBU
(CoAP/6LoWPAN connector) and also to integrate
with MQTT protocol data coming from additional
IoT devices (i.e. smartphone), that are used by edge
applications on the OBU (MQTT connector).
The “Communication System” part of the OBU,
manages different high-level capabilities. The
module CANBus Interface reads data coming from
the CAN Bus and decodes important data coming
from the in-vehicle sensors that are sent directly to
the OneM2M platform or used by edge applications
on the OBU.
4 “VIRTUAL SENSORS”
The innovative and relevant part of this study is to
demonstrate how additional IoT sensors placed in the
car prototype, in conjunction with a centralized
(OneM2M) platform for data collection, can enhance
the functions of the car itself: the vehicle can be used
for example as an IoT sensor for detecting the
surface condition for both highway and urban
scenarios.
Object virtualization aids to address the issues of
heterogeneity, interoperability, multitenancy,
scalability, counter-productivity, mobility and
protocol inconsistency that are commonly existing in
IoT. Related with the concept of Fog Computing,
since there is no sensor on the vehicle that
"physically" detects the roadway potholes, it is
thought to use a combination of sensors that can
already be integrated into the OEM dispositive (e.g.
accelerometers, gyroscopes, etc.) or use sensors from
external devices to be placed on-board (e.g.
smartphones, cameras, external accelerometers, etc.)
to recover the same type of data (acceleration,
orientation, etc.).
This is the concept of “Virtual Sensor”, that
differentiates the study conducted by previous ones.
In this way, data from different devices are fused
together and processed: from this sensor fusion
outputs, the data can be used to detect the road holes.
The result of this fusion is therefore a “pothole
detector” and these elaborations are sent to the cloud
OneM2M platform or RSU or other vehicles (via
communication system).
The data of the raw signal accelerations on the 3
axes will be collected and analysed using an inertial
6LoWPAN, a Nokia 6 smartphone and the
accelerometer sensor of an inertial measurement unit
(IMU). Figure 2 shows these devices.
Figure 2: a) Nokia smartphone, b) 6LoWPAN Sensor, c)
Inertial Measurement Unit.
The virtual sensor can use one or more
acceleration sensors combining the upcoming data in
a smart way (Figure 3). The accelerometer measures
changes in velocity of the sensor in three dimensions:
the linear sensing provides the sensor information
about its motion and thus taps, or shakes can be
detected.
Figure 3: "Virtual Sensor" concept.
The flow of raw data is (Figure 4):
In-Vehicle IoT Platform Enabling the Virtual Sensor Concept: A Pothole Detection Use-case for Cooperative Safety
235

- A wireless vibration sensor is deployed on the
connected vehicle, which notifies to the OBU via
MQTT/6LowPAN protocols the occurrences of
vibrational shock above a certain level due to a
pothole presence on the road;
- The OBU combines this information with other
data coming from CAN bus (speed, odometer, etc.)
and GPS and sends this data to the OneM2M IoT
Cloud platform, by using CoAP/MQTT and/or HTTP
as application protocols;
- The AD car applications or upcoming AD vehicle,
consumes the information and can arrange its speed
accordingly (Crowdsourced data can be retrieved via
a OneM2M subscription and used by other vehicles.)
Figure 4: Pothole detector algorithm.
5 EXPERIMENTAL SETUP
Road anomalies, such as potholes, sunk-in manhole
covers, or missing pavement, cause the abnormal
vibration of vehicles.
The accelerometer records all vehicle vibrations
including vibrations from the engine and the gear
box and all swings made by passengers: the linear
sensing in the direction of motion of the vehicle to
identify the braking, and in the direction
perpendicular to the direction of motion of the
vehicle to identify bumps and potholes. Similarly,
orientation can be determined by the sensor’s
sensitivity to the local gravitational field.
A continuous stream of data related to the linear
acceleration of the vehicle on three principal axes,
will provide additional measurements related to
distance travelled by the autonomous vehicle,
providing data related to the velocity and the extent
of acceleration towards obstructions (Figure 5).
Figure 5: a) Gravity vector and heading, pitch and roll
about axes b) Downward jerk sensed by accelerometer
which occurred due to potholes over the road.
The data from the accelerometer is
conventionally reported in units of g (1g= 9.81 m/s
2
).
In the initial condition and calibration, the
accelerometer reports a value of 1g along the z-axis
and 0 along the x and y axes when lying at rest face
upon a flat table. The gravity vector thus reported is
used as a reference for all other linear motion
sensing. As already mentioned in this case of study,
the data of the raw signal accelerations on the 3 axes
will be collected and analysed using a Nokia 6
smartphone, an inertial 6LoWPAN sensor and the
accelerometer sensor of an inertial measurement unit
(IMU). The virtual sensor can use one or more
acceleration sensors combining the upcoming data in
a smart way. To better understand the different types
of sensors used during the tests, will be made a
summary regarding the characteristics of the devices
used to collect the raw acceleration values.
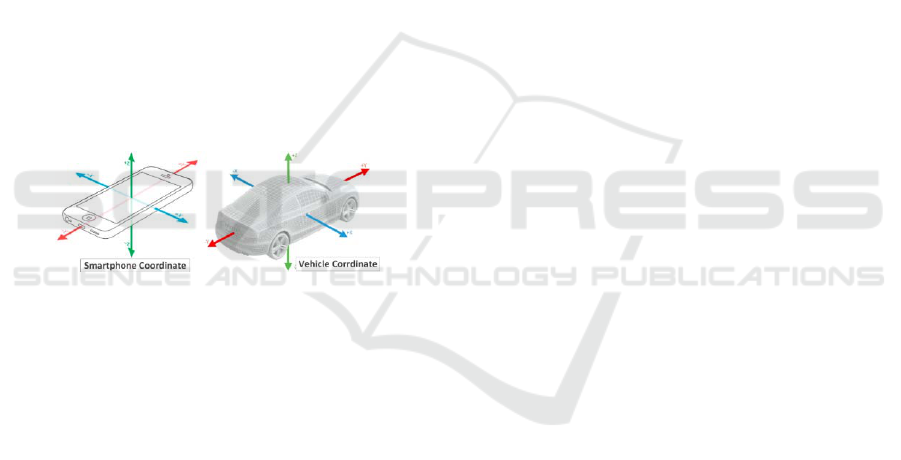
5.1 Smartphone Accelerometer
To use the accelerometer reading for detecting
various events, it is possible to virtually reorient the
axes of the smartphone to align along the axes of the
vehicle. Readings from the reoriented axes can be
used to detect events. Leveraging an accelerometer
as a vibration sensor, the characterization of potholes
and roads can be done using the readings of the
accelerometer.
It was implemented an App in Android Studio to
collect the raw accelerometer data in the three
directions and send the data to a MQTT broker
(Figure 6).
Figure 6: Android App raw accelerometer.
The using of the mobile device based on mobile
sensing techniques to detect potholes, is suitable and
convenient: all the motion sensors return multi-
dimensional arrays of sensor values for each
SensorEvent. The linear acceleration sensor provides
with a three-dimensional vector representing
acceleration along each device axis, excluding
gravity. [linear acceleration= acceleration -
IoTBDS 2019 - 4th International Conference on Internet of Things, Big Data and Security
236
acceleration due to gravity]. The simplest way to
remove the offset of a linear acceleration sensor, is to
build a calibration step into the application, in order
to iterate the alignment of the smartphone
accelerometer’s coordinate system and the vehicle’s
coordinate system (Android, 2018); (Android, 2018).
Smartphone accelerometers use the standard
sensor coordinate system. In practice, this means that
the following conditions apply when a device is lying
flat on a table in its natural orientation (see Figure 7):
If the device is pushed on the left side (so it
moves to the right), AccX value is positive.
If the device is pushed on the bottom (it moves
away from you), AccY value is positive.
If the device is pushed toward the sky with an
acceleration of A m/s
2
, AccZ is equal to A+9.81,
which corresponds to the acceleration of the
device (+A m/s
2
) minus the force of gravity (-
9.81 m/s
2
).
The stationary device will have an acceleration
value of +9.81, which corresponds to the
acceleration of the device (0 m/s
2
minus the force
of gravity, which is -9.81 m/s
2
).
Figure 7: Coordinate system (relative to a device) that's
used by the Sensor API.
5.2 6LoWPAN Sensor
The second sensor used to test the pothole detection
setup, is an inertial unit that supply raw
accelerometer data. SensOne leverages industry
standard IEEE802.15.4 RF protocol for robust and
power aware communication interfaces and USB2.0
connectivity (NGS, 2018). The SensOne has been
designed for battery powered Internet of Things
applications and natively supports state-of-the-art
Internet addressing protocols (e.g. 6LoWPAN), to
interoperate seamlessly with other devices.
The triple-axis MEMS accelerometer (12 bit-
resolution) in MPU-6050 assembled in the SensOne,
includes a wide range of features such as a
programmable full-scale range (±2g, ±4g, ±8g and
±16g), orientation detection, signalling and tap
detection. The values of accelerations sent are in
thousandths of g (9.81/1000 m/s
^2
).
5.3 Inertial Measurement Unit
Accelerometer Sensor
The third type of sensor that can be used to acquire
raw accelerometric data is the Inertial Measurement
Unit (IMU) that is an electronic device that measures
and reports a body's specific force, angular rate, and
sometimes the magnetic field surrounding the body,
using a combination of accelerometers and
gyroscopes, sometimes also magnetometers.
A programmable sensor module (“PCAN-GPS”)
(Peak-system, 2018) for position and orientation
determination, has a satellite receiver, a magnetic
field sensor, an accelerometer, and a gyroscope. The
sampled data can be transmitted on a CAN bus and
logged on the internal memory card.
The BMC050 (Bosch, 2018) is a fully
compensated electronic compass including a triaxial
geomagnetic sensor and a triaxial acceleration sensor
(6 degrees of freedom) that delivers excellent
performance in very small size.
6 PROCESSING AND
ALGORITHMS
The most common approach followed in previous
studies for detecting road condition is using sensors
to recognize the vibration patterns of the vehicle
caused due to any deformity or obstacle on the road.
Our main goals are not only detecting single
potholes, but also to classify road surfaces and
further evaluate road condition, through the
processing of the same raw data. There are two basic
categories for describing the road surface: smooth
roads (offers a high-quality driving surface to
vehicles traversing over it) and rough roads (roads
containing surface anomalies). The proposed real-
time pothole detection method based on “virtual
sensor” includes three main steps: accelerometer data
acquisition and normalization, pothole detection
approaches with algorithm of signal processing, and
pothole location determination (GPS data). In Figure
8, the block diagram of the whole implemented
algorithm is reported.
Different tests are performed in a test-drive track
with an Autonomous Driving car and a smartphone
blocked with a support horizontally on the
windshield, in order to understand if the
implemented algorithm offered good evaluation
thresholds and analyse the first results obtained with
the detection of potholes.
In-Vehicle IoT Platform Enabling the Virtual Sensor Concept: A Pothole Detection Use-case for Cooperative Safety
237
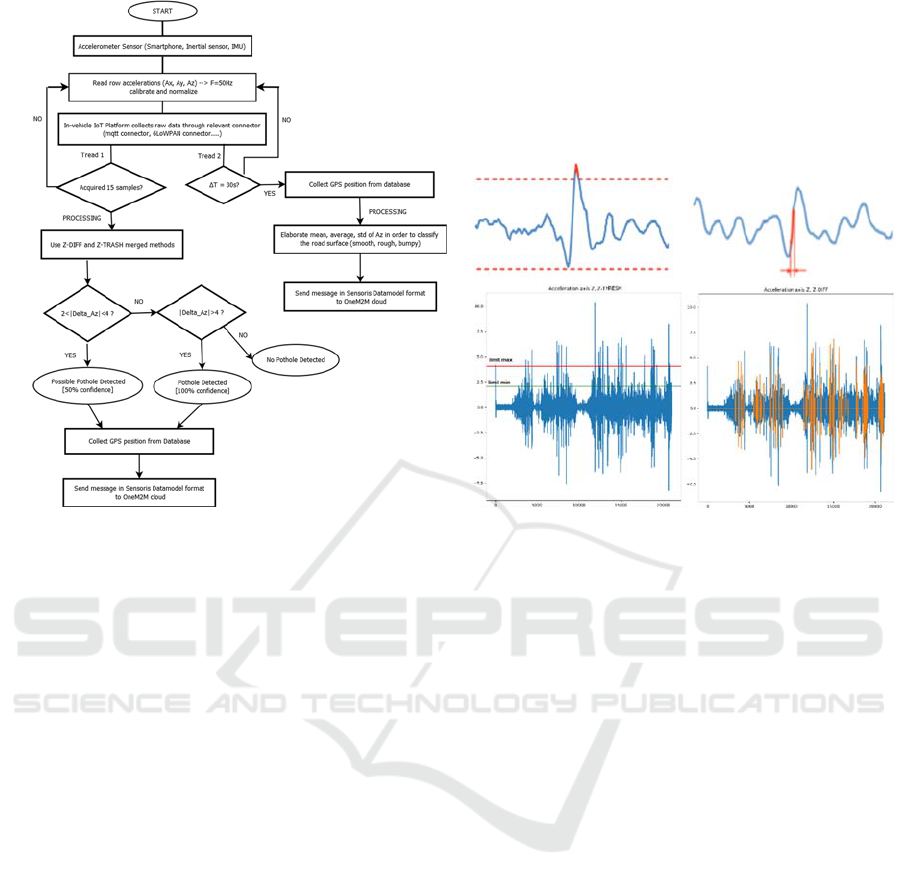
Figure 8: Block diagram real-time processing raw
accelerometer “Virtual Sensor”.
Data from the gravity and geomagnetic field
sensors is used to transform the raw linear
acceleration values from the device coordinate
system into world’s coordinate system: this
transformation allows the device to be in any
orientation while collecting data. In order to
implement a real-time algorithm, it is important to
integrate the raw accelerometer signals with the GPS
data periodically acquired by a database: in this case
it is possible to provide information about
localization of the holes.
To collect raw accelerometer data from the
different sensors, it is decided to use a frequency rate
of 50Hz (repeatable frequency on all selected
devices): supposing that the car have a travel speed
of 50km/h (speed limit in an urban scenario), using
this frequency rate, the road surface is monitored
every 0.27 meters (compliant with potholes’
dimensions). Unlike the technical tests carried out in
other works on this subject, the 50Hz value chosen
for the frequency is much higher and suitable for
tests on urban circuits (and not just tests in lab).
The raw accelerometer data (whether coming
from the smartphone, the 6LWPAN sensor or the
IMU sensor) are input to a processing algorithm that
uses a double comparison method to signal the single
pothole (Figure 9).
The first and the simplest event is tested on the
acquired data set (performed in a test-drive track
with a car and a smartphone), divided into sampling
windows, is thresholding the acceleration amplitude
at Z-axis. The features that classify the
measurements are the values exceeding specific
thresholds that identify the type of the potholes, e.g.
a large pothole or a cluster of potholes.
Figure 9: Threshold comparison method for raw
accelerometer signals axis Z (Z-THRESH and Z-DIFF).
Next, a slightly more advanced algorithm is
tested on the same acquired data set: it performs a
search for two consecutive measurements with
difference between the values above specific
threshold level; thus the algorithm detected fast
changes in vertical acceleration data.
The pothole will be indicated with the change in
the value of z-axis: in this case an alert is sent to
OneM2M Cloud every time a pothole or possible
bump is detected. If there is no (or slight) deflection
in the value of z-axis, then it is smooth road (no
bump or pothole) and if there is any deflection, a
bump or pothole is detected. If the magnitude of
value of z-axis deflects firstly in positive direction
and then towards negative direction with slight
deflection, then it will indicate a pothole.
In order to classify the different thresholds for the
bumps, it was evaluated all the different data training
implemented and it is decided to have two different
results:
For 2≤|threshold|≤4 “possible pothole”
For |threshold|≥ 4 “pothole detected”
The bump detection can be altered slightly to derive
another concept for surface classification.
The main idea is to count the number of bumpy
segments in a certain road section. Depending on that
number, one of the classes “smooth”, “rough”, and
“bumpy” is assigned as follows:
IoTBDS 2019 - 4th International Conference on Internet of Things, Big Data and Security
238
For 0 ≤ |bumps| ≤ N/3 “smooth class”
For N/3< |bumps|≤ 2N/3 “rough class”
For 2N/3< |bumps| ≤ N “bumpy class”
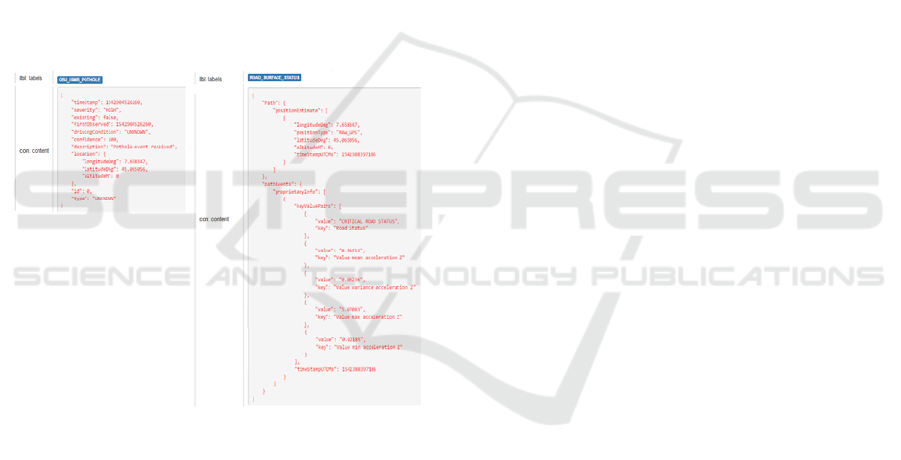
The possibility of classify the types of road surface
(from the optimal to the uneven), also occurs thanks
to the additional values processed for the raw
accelerations: it was decided to communicate every
30 seconds the values of minimum, maximum,
average and variance of the 3 components
acceleration (paying particular attention to the Z
component) so that it is possible to process the data
and compare it with the dangerousness of the road
surface. All this processed data (related to single
pothole and also concerning the classification of the
types of road surface) are formatted using Data
Model provided by Sensoris, that is actually
coordinated by ERTICO (Here, 2018) (Sensor-is,
2018) and are send to the OneM2M Cloud to provide
applications and services, or used by edge
applications on the OBU (Figure 10).
Figure 10: Example of MQTT messages send to OneM2M
Cloud.
As results of this quantitative tests performed in a
test-drive track with an Autonomous Driving car and
a smartphone, we create our model for the pothole
detection algorithm both for the possibility of
acquiring and processing the accelerometric data in
real-time, both for using these prototype within a
more complex and articulated IoT platform for the
management of safety critical aspects of driving and
maintenance of the road surface. For the 6LoWPAN
sensor and the accelerometer sensor on the IMU,
laboratory tests were carried out to set the detection
threshold and to consider these solutions in an
autonomous driving in an urban scenario (even if
they are more expensive and less accessible than a
common smartphone).
7 DISCUSSION & CONCLUSION
This paper explores the possibility of a real-time
monitoring and processing for the automatic
detection of pothole and humps, has a relevant role in
order to reduce the vehicle speed, alerting vehicle
drivers and then avoid potential accidents. The
possibility to use different accelerometer sensors, not
only related with AD cars (such as popular
smartphone) is an additional advantage as it provides
timely alerts about potholes and humps.
With the help of geographic information
technologies (e.g. GPS), it is possible to establish
new-strategy based solutions that use information
about the condition of roadways. These solutions aim
to help people and entities who are responsible for
performing preventive as well as corrective
maintenance to paved roads through continuous
surveillance using their smartphones which are
connected to a cartographic server that eases location
and quality control of the work done.
A given pothole, or any other road anomaly, may
not necessarily give the same pattern during each
drive over it. The sensors readings depend upon the
speed of the vehicle, how it approached the road
anomaly and the position of the sensor (orientation).
It also depends upon the suspension system of the
vehicle (minimum/maximum vibration experienced
by the vehicle).
Since this approach based on "bundles" for the
architectural IoT system has been chosen, it is easy
to select the accelerometric data collection system
between smartphone, 6LoWPAN sensor and IMU:
all the raw accelerometer data can be collected at a
sampling rate of 50Hz and in the first tests that were
carried out there were no gaps of accelerometric
values obtained preferring one type of sensor
compared to others.The proposed solution proven to
be able to quantitatively evaluate the quality of the
road: not only single potholes are detected but also
longer stretches of low-quality pavement. This could
allow taking the pavement quality into consideration
while calculating routes for navigation system.
In order to improve the efficiency and accuracy
of the detection of potholes and to enhance all this
case studies, as future work, it has been planned to
continue to perform more and different tests using
AD cars (also in the AUTOPILOT scenario): with a
larger test database, it will therefore be possible to
exhaustively process the results obtained with the
different sensors and to establish the reliability and
the trust of the implemented algorithms.
This system could be also deployed with a neural
network to implement Machine Learning on
In-Vehicle IoT Platform Enabling the Virtual Sensor Concept: A Pothole Detection Use-case for Cooperative Safety
239

Android: Machine Learning techniques can be
applied instead of threshold-based classification as
different vehicles may yield different sensor data for
same pothole. It will make the system more efficient
and introduce self-calibration functionality.
ACKNOWLEDGEMENTS
This work was supported by the European Union
through the AUTOPILOT project (H2020-IOT-2016,
grant agreement no. 731993).
REFERENCES
Akinwande, V., Adewole, K., Bello, O. & Akintola, A.,
2015. Automatic and real-time pothole detection and
traffic monitoring system using smartphone
technology. International Conference on Computer
Science Research and Innovations (COSRI).
Aksamit, P. & Szmechta, M., 2011. Distributed, mobile,
social system for road surface defects detection. 5th
International Symposium on Computational
Intelligence and Intelligent Informatics (ISCIII). IEEE,
september, pp. 37-40.
Android, 2018. [online] available at:
https://developer.android.com/guide/topics/sensors/sen
sors_overview
Android, 2018. [online] available at:
https://developer.android.com/guide/topics/sensors/sen
sors_motion
Aniket, D. & Vivek, D., 2016. Advance pothole
notification technique for vehicle road safety using
android applications. International Journal of
Enhanced Research in Science, Technology &
Engineering, 5(9).
Astarita, V. et al., 2012. A mobile application for road
surface quality control: uniqualroad. Procedia-Social
and Behavioral Sciences, issue 54, pp. 1135-1144.
Balakuntala, S. & Venkatesh, S., 2013. An intelligent
system to detect, avoid and maintain potholes: a graph
theoretic approach. Arxiv preprint arxiv:1305.5522.
Bhatt, U., Mani, S., Xi, E. & Kolter, J., 2017. Intelligent
pothole detection and road condition assessment. Arxiv
preprint arxiv:1710.02595.
Bhoraskar, R., Vankadhara, N., Raman, B. & Kulkarni, P.,
2012. Wolverine: traffic and road condition estimation
using smartphone sensors. Fourth International
Conference on Communication Systems and Networks
(COMSNETS) IEEE, January, pp. 1-6.
Bosch, 2018. [online] available at: https://www.bosch-
sensortec.com/bst/products/all_products/bmc050
Danti, A., Kulkarni, J. Y. & Hiremath, P. S., 2012. An
image processing approach to detect lanes, pot holes
and recognize road signs in indian roads. International
Journal of Modeling and Optimization, 2(6), p. 658.
De Silva, G. D. et al., 2013. Proceedings of the
International Conference on Advances in ICT for
Emerging Regions. Colombo, Sri Lanka, s.n., pp. 6-9.
Eriksson, J. Et al., 2008. The pothole patrol: using a mobile
sensor network for road surface monitoring.
Proceedings of the 6th International Conference on
Mobile Systems, Applications, and Services. ACM,
june, pp. 29-39.
ERTICO, 2017. [online] available at: http://autopilot-
project.eu/
Ferrera, e. Et al., 2017. Xmpp-based infrastructure for iot
network management and rapid services and
applications development. Annals of
telecommunications, 72(7-8), pp. 443-457.
Here, 2018. [online] available at: https://www.here.com/
en/vision/innovation/sensoris
Jothi, S., Priyanka, S., Yuvaraj, P. & Kalaivani, S., 2010.
Automatic detection of potholes and humps on roads to
aid drivers. International Journal of Advanced
Research in Management, Architecture, Technology
and Engineering (IJARMATE), 2(3).
Kalra, N., Chugh, G. & Bansal, D., 2014. Analyzing
driving and road events via smartphone. International
Journal of Computer Applications, 98(12), pp. 5-9.
Langle, L. & Dantu, R., 2009. Are you a safe driver?.
Computational Science and Engineering, 2009.
CSE'09. IEEE, volume 2, pp. 502-507.
Maag, C., Muhlbacher, D., Mark, C. & Kruger, H. P.,
2012. Studying effects of advanced driver assistance
systems (adas) on individual and group level using
multi-driver simulation. IEEE Intelligent
Transportation Systems Magazine, 4(3), 4(3), pp. 45-
54.
Mednis, A. et al., 2011. Real time pothole detection using
android smartphones with accelerometer. International
Conference on Distributed Computing in Sensor
Systems and Workshops (DCOSS). IEEE, june, pp. 1-6.
Mertz, C., 2011. Continuous road damage detection using
regular service vehicles. Proceedings of the Its World
Congress, October.
Mohan, P., Padmanabhan, V. N. & Ramjee, R., 2008.
Nericell: rich monitoring of road and traffic conditions
using mobile smartphones. Proceedings of the 6th
ACM Conference on Embedded Network Sensor
Systems. ACM, November, pp. 323-336.
Mukherjee, A. & Majhi, S., 2016. Characterisation of road
bumps using smartphones. European Transport
Research Review, 8(2), p. 13.
Ngs, 2018. [online] available at: http://ngs-sensors.it/it/
Peak-system, 2018. [online] available at:
https://www.peak-system.com/pcan-gps.378.0.html
Scarrone, e., 2016. [online] available at:
www.homegatewayinitiative.org
/userfiles/file/downloads/proceedings/s10-
%20scarrone%20-%20onem2m.pdf.
Sensor-is, 2018. [online] available at: http://sensor-is.org/
Wang, H. W. et al., 2015. A real-time pothole detection
approach for intelligent transportation system.
Mathematical Problems in Engineering.
IoTBDS 2019 - 4th International Conference on Internet of Things, Big Data and Security
240
