
AveRobot: An Audio-visual Dataset for People Re-identification and
Verification in Human-Robot Interaction
Mirko Marras
1
, Pedro A. Mar
´
ın-Reyes
2
, Javier Lorenzo-Navarro
2
, Modesto Castrill
´
on-Santana
2
and Gianni Fenu
1
1
Department of Mathematics and Computer Science, University of Cagliari, V. Ospedale 72, 09124 Cagliari, Italy
2
Instituto Universitario Sistemas Inteligentes y Aplicaciones Numericas en Ingenieria (SIANI),
Universidad de Las Palmas de Gran Canaria, Campus Universitario de Tafira, 35017 Las Palmas de Gran Canaria, Spain
Keywords:
Face-voice Dataset, Deep Learning, People Verification, People Re-Identification, Human-Robot Interaction.
Abstract:
Intelligent technologies have pervaded our daily life, making it easier for people to complete their activities.
One emerging application is involving the use of robots for assisting people in various tasks (e.g., visiting
a museum). In this context, it is crucial to enable robots to correctly identify people. Existing robots often
use facial information to establish the identity of a person of interest. But, the face alone may not offer
enough relevant information due to variations in pose, illumination, resolution and recording distance. Other
biometric modalities like the voice can improve the recognition performance in these conditions. However,
the existing datasets in robotic scenarios usually do not include the audio cue and tend to suffer from one
or more limitations: most of them are acquired under controlled conditions, limited in number of identities
or samples per user, collected by the same recording device, and/or not freely available. In this paper, we
propose AveRobot, an audio-visual dataset of 111 participants vocalizing short sentences under robot assistance
scenarios. The collection took place into a three-floor building through eight different cameras with built-in
microphones. The performance for face and voice re-identification and verification was evaluated on this
dataset with deep learning baselines, and compared against audio-visual datasets from diverse scenarios. The
results showed that AveRobot is a challenging dataset for people re-identification and verification.
1 INTRODUCTION
Humans have been expecting the integration of in-
telligent robots in their daily routine for many years.
In this vision, one of the main applications receiving
great attention involves the use of assistance robots.
The literature describes a wide range of robots acting
individually as tour guides since the late 90’s (Thrun
et al. 1999; Dom
´
ınguez-Brito et al. 2001). More re-
cently, the focus was moved to the social interaction
between robots and humans. Integrating natural lan-
guage processing and semantic understanding had a
great success in different areas to this end (e.g., Bo-
ratto et al. 2017; Shiomi et al. 2007). In the robotics
context, joined with the contribution of path optimi-
zation theory (Mac et al. 2017; Fenu and Nitti 2011),
they made possible to improve the cognitive and mo-
bility capabilities of robots while guiding or assisting
visitors (Susperregi et al. 2012). Furthermore, some
robots were equipped with a wheeled platform to re-
duce mobility constraints (Faber et al. 2009), while
others showed pro-active capabilities with the visitors
for completing assigned tasks (Rosenthal et al. 2010).
In the same direction, under populated environments,
multiple interactive robots acting as guides coopera-
ted by sharing users’ profiles and tour information
(Trahanias et al. 2010; Hristoskova et al. 2012).
In the latter dynamic scenario, multiple and likely
different robots act as coordinated assistants for any
visitor and need to cooperate with each other. These
configuration can avoid challenging and dangerous si-
tuations of multi-floor movements (e.g, Troniak et al.
2013; L
´
opez et al. 2013a,b) and reduce the complex-
ity required for implementing navigation. However,
for certain tasks, this setup imposes the interchanging
of descriptors about the visitors among a group of he-
terogeneous robots. For instance, this is required for
guiding a person when s/he moves from one floor to
another, so that the receiving robot can pro-actively
identify the assisted person among other visitors. Re-
cognizing the redirected person is an expected capa-
bility for the receiving robot. This can be viewed both
Marras, M., Marín-Reyes, P., Lorenzo-Navarro, J., Castrillón-Santana, M. and Fenu, G.
AveRobot: An Audio-visual Dataset for People Re-identification and Verification in Human-Robot Interaction.
DOI: 10.5220/0007690902550265
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 255-265
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
255

as a re-identification or verification task.
Embedded applications often use the face featu-
res to establish the identity of a person of interest
(Cruz et al. 2008; Barra et al. 2013; Taigman et al.
2014). Unfortunately, the face may not offer enough
information in many scenarios due to variations in
pose, illumination, resolution and recording distance.
Other biometric modalities, such as the voice, may
improve the recognition performance (Ouellet et al.
2014; Nagrani et al. 2017), but they also suffer from
environmental noise or distance to the microphone.
Considering two or more biometric modalities gene-
rally tends to make the system more reliable due to
the presence of multiple independent pieces of evi-
dence (Fenu et al. 2018; Fenu and Marras 2018; Barra
et al. 2017). However, the existing datasets collected
in Human-Robot Interaction (HRI) scenarios usually
include no audio cue and tend to suffer from one or
more limitations: they are obtained under controlled
conditions, composed by a small number of users or
samples per user, collected from the same device, and
not freely available.
The contribution of this paper is twofold. The first
one includes a pipeline for creating an audio-visual
dataset tailored for testing biometric re-identification
and verification capabilities of robots under a multi-
floor cooperation scenario. By using tripods equip-
ped with multiple recording devices and semi/fully-
automated processing scripts, we simulate different
robot acquisition systems and reduce the human inter-
vention during the dataset construction. We leverage
this pipeline to collect AveRobot, a multi-biometric
dataset of 111 participants vocalizing short senten-
ces under robot assistance scenarios. The collection
took place into a three-floor building by means of
eight recording devices, targeting various challenging
conditions. The second contribution involves the in-
vestigation of different techniques for training deep
neural networks on face and spectrogram images ex-
tracted directly from the frames and the raw audios,
and the comparison of the performance on this new
dataset against the performance the same techniques
obtain on other traditional audio-visual datasets recor-
ded on different scenarios. We provide baselines for
face and voice re-identification and verification tasks
to assess the relevance and the usefulness of our data-
set. The results show that the dataset we are providing
appears as challenging due to the uncontrolled condi-
tions. The AveRobot dataset is publicly available at
http://mozart.dis.ulpgc.es/averobot/.
The paper is organized as follows. Section 2 de-
picts the related work, while Section 3 describes the
proposed pipeline and the resulting dataset. Section 4
shows the results and Section 5 concludes the paper.
2 RELATED WORK
In this section, we discuss various literature contribu-
tions relevant to the creation of the dataset presented
in this paper. First, we describe traditional and deep
learning methods for biometric recognition; then, we
compare datasets used by previous works.
Traditional HRI Methods. The field of biometric re-
cognition in HRI was dominated by techniques inte-
grating hand-crafted features related to both hard bi-
ometrics, such as face, and soft biometrics, such as
gender, age, and height (Cielniak and Duckett 2003;
Cruz et al. 2008). The combination of audio-visual
biometric features was leveraged by Martinson and
Lawson (2011). Their method performed face recog-
nition through basic neural networks and speaker re-
cognition with Gaussian Mixture Models (GMMs).
To increase the robustness under uncontrolled scena-
rios, Ouellet et al. (2014) combined face and voice
identification with human metrology features (e.g.,
anthropometric measurements). Correa et al. (2012)
modelled faces in the thermal and visual spectra for
the same goal. In case of bad illumination, their
approach relies on thermal information, while ther-
mal and visual information complement each other in
good illumination scenarios. Skeleton data was le-
veraged by Sinha et al. (2013) to detect gait cycles and
compute features based on them. Feature selection
and classification were performed with adaptive neu-
ral networks. Illumination-independent features (i.e.,
height and gait) were also used by Koide and Miura
(2016). To manage the limitations of RGB and ske-
leton features in dealing with occlusions and orien-
tation, Cosar et al. (2017) and Liu et al. (2017) pre-
sented RGB-D-based approaches using features from
the body volume. The work proposed by Irfan et al.
(2018) used a multi-modal Bayesian network for in-
tegrating soft biometrics together with the primary in-
formation provided by faces.
Deep Learning Methods. The recent widespread of
deep learning in different areas (e.g., Boratto et al.
2016, Nagrani et al. 2017) has motivated the use of
the neural networks as feature extractors combined
with classifiers, as proposed in Wang et al. 2018b. For
face recognition, backbone architectures rapidly evol-
ved from AlexNet (Krizhevsky et al. 2012) to SENet
(Hu et al. 2017). Deepface (Taigman et al. 2014) and
its variations use a cross-entropy-based Softmax loss
as a metric learning while training the network. Ho-
wever, Softmax loss is not sufficient by itself to le-
arn features with large margin, and other loss functi-
ons were explored to enhance the generalization abi-
lity. For instance, euclidean distance based losses em-
bed images into an euclidean space and reduce intra-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
256

Table 1: The comparison of the existing datasets for biometric identification and verification in Human-Robot Interaction.
Dataset Users Is Public? Devices/User Videos/User Visual Specs Audio Specs
Correa et al. 2012 16-171 Yes 2 1-4 RGB + RGB-D -
Munaro et al. 2014 50 Yes 1 5 RGB + RGB-D -
Ouellet et al. 2014 22 No 1 3 RGB + RGB-D 16bit 48kHz
Liu et al. 2017 90 Yes 1 2 RGB + RGB-D -
Wang et al. 2018b 26 No 1 1 Grayscale -
Irfan et al. 2018 14 No 1 4 RGB -
AveRobot (Ours) 111 Yes 8 24 RGB 16bit 16kHz
variance while enlarging inter-variance. Contrastive
loss (Sun et al. 2015) and Triplet loss (Schroff et al.
2015) are commonly used, but sometimes they exhi-
bit training instability. Center loss (Wen et al. 2016)
and Ring loss (Zheng et al. 2018) are good alternati-
ves. Angular/cosine-margin based losses were propo-
sed to learn features separable through angular/cosine
distance (Wang et al. 2018a). For speaker recognition,
GMMs and i-vectors models were originally used on
top of a low dimensional representation called Mel
Frequency Cepstrum Coefficients (MFCCs) (Hansen
and Hasan 2015). However, their performance de-
grades rapidly in real world applications. They focus
only on the overall spectral envelope of short frames.
This led to a shift from hand-crafted features to neural
approaches trained on high dimensional inputs (Lukic
et al. 2016;Nagrani et al. 2017).
HRI Datasets. Table 1 reports a representative set
of datasets for people recognition in HRI scenarios.
Correa et al. (2012) generated four different image
databases to compare the use of visual and thermal in-
formation. To inspect RGB-D images, Munaro et al.
(2014) collected a dataset of 50 different subjects,
performing a certain routine of motions in front of
a Kinect. The dataset includes synchronized RGB
and depth images, persons segmentation maps and
skeletal data taken in two different locations. In the
same direction, Liu et al. (2017) collected a dataset
including 90 users, each recorded during sitting and
walking in two different rooms. Moreover, to enable
audio-visual people recognition, Ouellet et al. (2014)
used a Kinect camera to capture RGB images and a
microphone array with eight channels to collect au-
dios. The data were acquired for 22 participants sit-
ting and moving their faces in different poses. Furt-
hermore, Wang et al. (2018b) created a database re-
cording the daily interactions between a robot and its
users. More recently, Irfan et al. (2018) collected data
from 14 participants over four weeks in the context of
real-world applications for cardiac rehabilitation ther-
apy with a personalized robot. Summarizing, existing
datasets usually suffer from one or more of the follo-
wing limitations: they are obtained under controlled
conditions, limited in size or samples per user, col-
lected by the same device, do not include audio, or
not freely available. By contrast, our dataset has been
designed to try to reduce those limitations.
3 THE PROPOSED DATASET
In this section, we introduce the proposed dataset, in-
cluding the scenario, the statistics, the environmental
setup and the collection pipeline adopted.
3.1 Collection Scenario
The data gathering conducted in this work involved
acquiring audio-visual data of participants reprodu-
cing short sentences in front of recording devices in
indoor environments. The resulting dataset is referred
to as AveRobot. The main goal was to mimic a robot
assistance scenario in a semi-constrained indoor envi-
ronment, as often encountered in public buildings like
universities or museums. More precisely, the data col-
lection took place inside a three-floor office building.
Considering that the problem was related to the ro-
bot sensory part, no real robots were necessary, but
they were simulated through the use of various ca-
meras and microphones similar to the ones integrated
into robots. As a result, the interactions in each floor
were recorded with different devices, simulating a to-
tal number of eight robot acquisition systems: two in
the first floor, three in the second one, and three in the
third one. Furthermore, as a person has two options
to reach another floor (i.e. using the elevator or the
stairs), the recordings were made at three locations
for each floor: near the stairs, along the corridor, and
outside the lift. Figure 1 provides sample faces de-
tected in AveRobot videos. As the reader may expect,
the use of different acquisition devices poses changes
in image illumination, geometry and resolution, and
sound quality. In fact, the acquisition was degraded
with real-world noise, consisting of background chat-
ter, laughter, overlapping speech, room acoustics, and
there was a range in the quality of recording equip-
ment and channel noise.
AveRobot: An Audio-visual Dataset for People Re-identification and Verification in Human-Robot Interaction
257

Figure 1: Samples from the dataset proposed in this paper. Each column corresponds to a specific participant and shows one
acquisition per floor. The samples depict variations in pose, illumination, resolution and recording distance.
3.2 Collection Pipeline
To collect the proposed audio-visual dataset, we fol-
lowed a pipeline whose steps are described as follows.
Step 1: Device Selection. Eight recording devices
were selected to make up the dataset, each simula-
ting a different robot acquisition system. Table 2 de-
tails their characteristics. It should be noted that the
devices expose different peculiarities and they are si-
milar to the sensors embedded in robots. Camera 1
and 7 tended to generate more blurred recordings. On
the other hand, Camera 3 and 6 recorded videos using
interlaced scan, differently from the progressive scan
performed by the others.
Step 2: Environmental Setup. We grouped the de-
vices per floor by considering their different type and
various operational heights. Floor 0 hosted Camera
1 and 2 at a fixed height of 130cm, Floor 1 included
Camera 3, 4 and 5 at a fixed height of 120cm, and Ca-
mera 6, 7 and 8 worked on Floor 3 at a fixed height of
150cm. Therefore, each floor hosted a smartphone ca-
mera, a compact camera and a video camera, except
Floor 0. To assure that the recordings were done in
similar conditions, tripods were used for compact and
video cameras, while smartphone cameras were held
by a human operator at the same height of the other
devices. In most cases, we selected a recording height
lower than a human because robots are typically not
very tall (e.g., Pepper is 120cm height). The devices
were configured with the highest possible resolution
at a constant frame rate (25 fps for Camera 6 and 30
fps for the remaining cameras).
Step 3: User Recording. The identical recording
procedure was repeated for each user of our dataset.
Firstly, for each location, the user selected and me-
morized the sentence to be articulated, taken from a
list of pre-defined sentences. Meanwhile, the devices
were arranged in a position near the target location
(i.e. stairs, corridor and lift). Then, the human ope-
rators switched on the corresponding devices at the
same time, while the user approached the camera and
reproduced the sentence in front of the capturing de-
vices. In this way, at each location, the same speech
was simultaneously recorded with two/three devices.
The same process was repeated on each floor and lo-
cation by selecting a different sentence. The overall
process took between 6 and 10 minutes per user.
Step 4: Data Protection. After finishing the session,
the user read and signed an appropriate agreement in
order to respect the European data protection regula-
tion. The information provided by the participant in-
cluded but it was not limited to: her/his full name, the
identification number, whether s/he authorizes or not
to show their data as samples on research articles, and
the signature. Gender, height and age were registered.
Step 5: Video Labelling. The videos were manually
labelled to keep track of the participant identity, floor
and location, the pronounced sentence and the recor-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
258

Table 2: The specifications of the recording devices used for the dataset construction.
ID Model Type Resolution Fps Format Height (cm) Floor
1 Casio Exilim EXFH20 Compact Camera 1280 × 720 30 AVI
130 0
2 Huawei P10 Lite Smartphone Camera 1920 × 1080 30 MP4
3 Sony HDR-XR520VE Video Camera 1920 × 1080 30 MTS
120 14 Samsung NX1000 Compact Camera 1920 × 1080 30 MP4
5 iPhone 6S Smartphone Camera 1920 × 1080 30 MOV
6 Sony DCR-SR90 Video Camera 720 × 576 25 MPG
150 27 Olympus VR310 Compact Camera 1280 × 720 30 AVI
8 Samsung Galaxy A5 Smartphone Camera 1280 × 720 30 MP4
ding device. To this end, each video was properly
renamed by using the following convention: UserId-
FloorId-LocationId-SentenceId-DeviceId. Moreover,
a metadata file was created to save the personal in-
formation regarding each user: the assigned id, name,
surname, gender, height, native language, age and ap-
proval status (i.e. if they authorized to publish their
data in research articles). The anonymized version is
made publicly available together with the dataset.
Step 6: Visual Post-Processing. First, all the videos
were converted from the original video format to the
target MP4 format. Then, the faces were detected and
aligned with MTCNN (Zhang et al. 2016), resized to
224×224 pixels and stored as PNG images into a spe-
cific folder. Those frames with detected faces were
extracted and saved, with original resolution, as PNG
images into another folder. Each image was manually
checked to remove false positives.
Step 7: Audio Post-Processing. Once that the audio
was extracted from each video and stored as a WAV
file, the silence part at the beginning and ending of the
audio was removed through a semi-automated pro-
cess which involved the Auditok
1
segmentation tool.
Therefore, the resulting audios included only the part
when the participant talks. Third, each audio was con-
verted to single-channel, 16-bit streams at a 16kHz
sampling rate. The related spectrograms were gene-
rated in a sliding window fashion using a Hamming
window of width 25ms and step 10ms for each second
of speech. As a result, multiple spectrograms were
generated for each audio.
3.3 Dataset Statistics
The proposed dataset contains 2, 664 videos from 111
participants (65% male and 35% female) who voca-
lize different short sentences. The sentences were se-
lected by the participant from a pre-defined set of 34
sentences tailored for a robot assistance scenario. The
collected people span different ethnicities (e.g., Chi-
nese and Indian), ages (avg. 27; std. 11; min. 18;
max. 60), and heights (avg. 1.74m; std. 0.10m; min.
1
https://github.com/amsehili/auditok
1.50m; max. 1.92m). Figure 2 depicts relevant distri-
butions along the dataset. The gender, height, and age
for each participant are also provided together with
the videos. Each person was recorded in 3 locations
(i.e. stairs, floor and lift) for each one of the 3 floors
of the building. As mentioned above, 8 diverse recor-
ding devices were leveraged during the collection to
simulate the robot acquisition systems. The recording
devices assigned to the same floor worked simultane-
ously. Thus, the dataset comprises 24 videos per user:
• 1st Floor: 2 (devices) × 3 (locations) = 6 videos.
• 2nd Floor: 3 (devices) × 3 (locations) = 9 videos.
• 3rd Floor: 3 (devices) × 3 (locations) = 9 videos.
The total length of the video resources provided by
the proposed dataset is 5h 17min, occupying 21.8GB.
Each participant is represented by more than 3min of
videos, each lasting around 7s. It should be noted that
each video includes three phases: (i) when the person
is approaching to the devices, (ii) when s/he speaks
in front of them, and (iii) when s/he leaves the scene.
Hence, looking only at the face content, each video
contains around 127 frames with a detected face and
each user is represented by over 3, 000 detected fa-
ces. The total number of detected faces is 338, 578,
occupying 18.0GB. On the other hand, looking at
the voice content, each video contains around 3s of
speech and each user is represented by over 1m of
content. The total length of the voice data is around
1h 40min, occupying 283MB.
4 EXPERIMENTS
In this section, we evaluate the wildness of AveRo-
bot by conducting a number of baseline experiments.
First, we detail the implementation of the neural net-
work architecture and the resulting loss functions se-
lected as baselines. Then, the experimental protocols
are described for both people re-identification and ve-
rification. Figure 3 provides an overview of our ex-
perimental and evaluation methodology. Finally, we
AveRobot: An Audio-visual Dataset for People Re-identification and Verification in Human-Robot Interaction
259

Figure 2: The dataset statistics about the gender per age dis-
tribution (top), the user height distribution (center), and the
pronounced sentence distribution among videos (bottom).
compare the performance on AveRobot and other tra-
ditional audio-visual datasets.
4.1 Training and Testing Datasets
To the best of our knowledge, no public and large
audio-visual dataset has been proposed for face and
voice re-identification and verification in HRI scena-
rios. As a result, we leveraged traditional audio-visual
datasets for training the baselines and we tested them
not only on AveRobot, but also on datasets from di-
verse audio-visual contexts. First, this choice enables
the computation of state-of-the-art deep learning ba-
seline scores on AveRobot. Second, it can be possible
to observe how the baselines differently perform on
AveRobot and other traditional audio-visual datasets,
giving an overview of the challenging level of AveRo-
bot. The audio-visual datasets we included were divi-
ded in one training dataset and several testing datasets
to replicate a cross-dataset setup.
Training Dataset. VoxCeleb Train Split is an audio-
visual speaker identification and verification dataset
collected by Nagrani et al. (2017) from Youtube, in-
cluding 21,819 videos from 1,211 identities. It is the
most suited for training a deep neural network due to
the wide range of users and samples per user.
Testing Dataset 1. VoxCeleb Test Split is an audio-
visual speaker identification and verification dataset
collected by Nagrani et al. (2017) from Youtube, em-
bracing 677 videos from 40 identities.
Testing Dataset 2. MOBIO is a face and speaker re-
cognition dataset collected by McCool et al. (2012)
from laptops and mobile phones under a controlled
scenario, including 28,800 videos from 150 identities.
Testing Dataset 3. MSU-AVIS is a face and voice
recognition dataset collected by Chowdhury et al.
(2018) under semi-controlled indoor surveillance sce-
narios, including 2,260 videos from 50 identities.
Testing Dataset 4. The dataset proposed in this pa-
per, AveRobot, is an audio-visual biometric recogni-
tion dataset collected under robot assistance scena-
rios, including 2,664 videos from 111 identities.
4.2 Evaluation Setup
Face Input Features. As mentioned above, each
frame is analyzed in order to detect the face area and
landmarks through MTCNN (Zhang et al. 2016). The
five facial points (two eyes, nose and two mouth cor-
ners) are adopted to perform the face alignment. The
faces are then resized to 112 × 112 pixels in order to
fit in our model and each pixel in [0, 255] in RGB
images is normalized by subtracting 127.5 then divi-
ding by 128. The resulting images are then used as
input to the deep neural network. It should be noted
that the face image size considered at this step differs
from the one used during the visual post-processing
of our dataset due to efficiency reasons. Thus, it was
applied to all the considered datasets, so that the same
face image size was maintained for all of them.
Voice Input Features. Each audio is converted to
single-channel, 16-bit streams at a 16kHz sampling
rate for consistency. The spectrograms are then ge-
nerated in a sliding window fashion using a Ham-
ming window of width 25ms and step 10ms. This
gives spectrograms of size 112 × 112 for one second
of speech. Mean and variance normalisation is perfor-
med on every frequency bin of the spectrum. No other
speech-specific pre-processing is used. The spectro-
grams are used as input to the neural network.
Backbone Network. The underlying architecture is
based on the ResNet-50 (He et al. 2016), known for
good classification performance on face and voice
data. The fully-connected layer at the top of the ori-
ginal network was replaced by three layers in the fol-
lowing order: a flatten layer, a 512-dimensional fully-
connected layer whose output represents the embed-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
260

a)
b)
Figure 3: Experimental Evaluation Overview. The steps for training and testing protocols of the face modality (a) and the
steps for training and testing protocols of the voice modality (b).
ding features used throughout the experiments; and
an output layer whose implementation depends on the
loss function integrated in the corresponding network.
Loss Functions. In order to enable the backbone net-
work learns discriminative features, several instances
of the network were independently trained through
different loss functions from various families. The
Softmax loss (Taigman et al. 2014) and its variations,
called Center loss (Wen et al. 2016) and Ring loss
(Zheng et al. 2018), represented the cross-entropy-
based family. Additive Margin loss (Wang et al.
2018a) served the angular-margin-based family.
Training Details. For each possible pair of moda-
lity and loss function, a different ResNet-50 backbone
network was separately trained on top of the VoxCe-
leb Train Split data. The models were initialised with
weights pre-trained on ImageNet. Stochastic gradient
descent with a weight decay set to 0.0005 was used on
mini-batches of size 512 along 40 epochs. The initial
learning rate was 0.1, and this was decreased with a
factor of 10 after 20, 30 and 35 epochs. The training
procedure was coded in Python, using Keras on top of
Tensorflow; it run on 4 GPUs in parallel.
4.3 Evaluation Protocols
Re-Identification. For each testing dataset, the proto-
col aims to evaluate how the trained models are capa-
ble of predicting, for a given test frame/spectrogram,
the identity of the person chosen from a gallery of
identities. For each experiment conducted on a testing
dataset, we randomly selected 40 users every time in
order to (i) keep constant the number of considered
users and (ii) maintain comparable the results across
the different datasets. VoxCeleb Test Split has the mi-
nimum number of participants among the considered
datasets (i.e., 40). For each user, we chosen the first
80% of videos for the gallery, while the other 20%
of videos were probes. For each user, we randomly
selected 20 frames/spectrograms from the gallery vi-
deos as gallery images, and 100 frames/spectrograms
from the probe videos as probe images. Then, the
output of the last layer of the ResNet-50 instances
was considered as feature vector associated to each
frame/spectrogram. The Euclidean distance was used
to compare feature vectors obtained from models trai-
ned on Softmax, Center loss and Ring loss, while the
Cosine distance was used for features vectors obtai-
AveRobot: An Audio-visual Dataset for People Re-identification and Verification in Human-Robot Interaction
261

ned from models trained on Angular Margin loss due
to its underlying design. Then, we measured the top
one rank, a well-accepted measure to evaluate the
performance on people re-identification tasks (e.g.,
Zheng et al. 2013). The probe image is matched
against a set of gallery images, obtaining a ranked
list according to their matching similarity. The cor-
rect match is assigned to one of the top ranks, the top
one rank in this case (Rank-1). Thus, it was used to
evaluate the performance of the models on the test
images/spectrograms. Starting from the subject se-
lection, the experiment was repeated and the results
were averaged.
Verification. For each testing dataset, the protocol
aims to evaluate how the trained models are capable
of verifying, given a pair of test frames/spectrograms,
whether the faces/voices come from the same person.
From each testing dataset, we randomly selected 40
subjects due to the same reasons stated in the above
re-identification protocol. Then, we randomly created
a list of 20 videos (with repetitions) for each selected
user and, from each one of them, we randomly created
20 positive frame pairs and 20 negative frame pairs.
The output of the last layer of the ResNet-50 network
instances was considered as feature vector associated
to each frame/spectrogram. We used the same dis-
tance measures leveraged for re-identification and the
Equal Error Rate (EER) was computed to evaluate the
performance of the models on the test pairs. EER is
a well-known biometric security metric measured on
verification tasks (Jain et al. 2000). EER indicates
that the proportion of false acceptances is equal to the
proportion of false rejections. The lower the EER, the
higher the performance. Lastly, starting from the sub-
ject selection, the experiment was repeated and the
results were averaged.
It should be noted that the above choices allow to
evaluate performance on comparable and reasonable
numbers of samples among the different datasets.
4.4 Face Evaluation Results
Figure 5 provides the results obtained for both face
re-identification and face verification on the selected
testing datasets. As it might be expected, the mo-
del performance decreases when we move from semi-
controlled to uncontrolled scenarios (robot assistance
recordings in AveRobot VS mobile recordings in MO-
BIO), while they remain more stable between datasets
coming from scenarios which could be comparable in
terms of wildness level (mobile recordings in MOBIO
VS interview recordings in VoxCeleb Test Split and
indoor surveillance recordings in MSU-AVIS VS ro-
bot assistance recordings in AveRobot). The general
system performance degrades due to the lower resolu-
tion, bad illumination and pose variations of the cap-
tured face images. For face re-identification, AveR-
obot provides inferior performance with respect to
the traditional audio-visual datasets. We achieve be-
tween 57% and 64% of rank-1 accuracy, more than
10% lower than the performance of the nearest data-
set, MSU-AVIS. For verification, the margin over the
two datasets is narrower, but there is still a significant
decreases in performance with respect to MOBIO and
VoxCeleb Test Split. The results confirm that Soft-
max is not sufficient to train discriminative features.
In fact, it is outperformed by the models trained with
other loss functions. Overall, the results obtained on
VoxCeleb Test Split and MOBIO are better in com-
parison to the ones observed for AveRobot and MSU-
AVIS. The experiments highlight the need of more ad-
vanced algorithms capable of mitigating the impact of
the challenging conditions on the performance.
4.5 Voice Evaluation Results
The results obtained for both voice re-identification
and voice verification are depicted in Figure 5. The
tasks are challenging since we consider spectrograms
obtained by one second of speech and we compute
the results based on the comparison of such short
Figure 4: The results obtained by ResNet-50 trained with various loss functions on VoxCeleb Train Split and tested on unseen
users from different datasets for face re-identification through Rank-1 (left) and verification through EER (right).
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
262
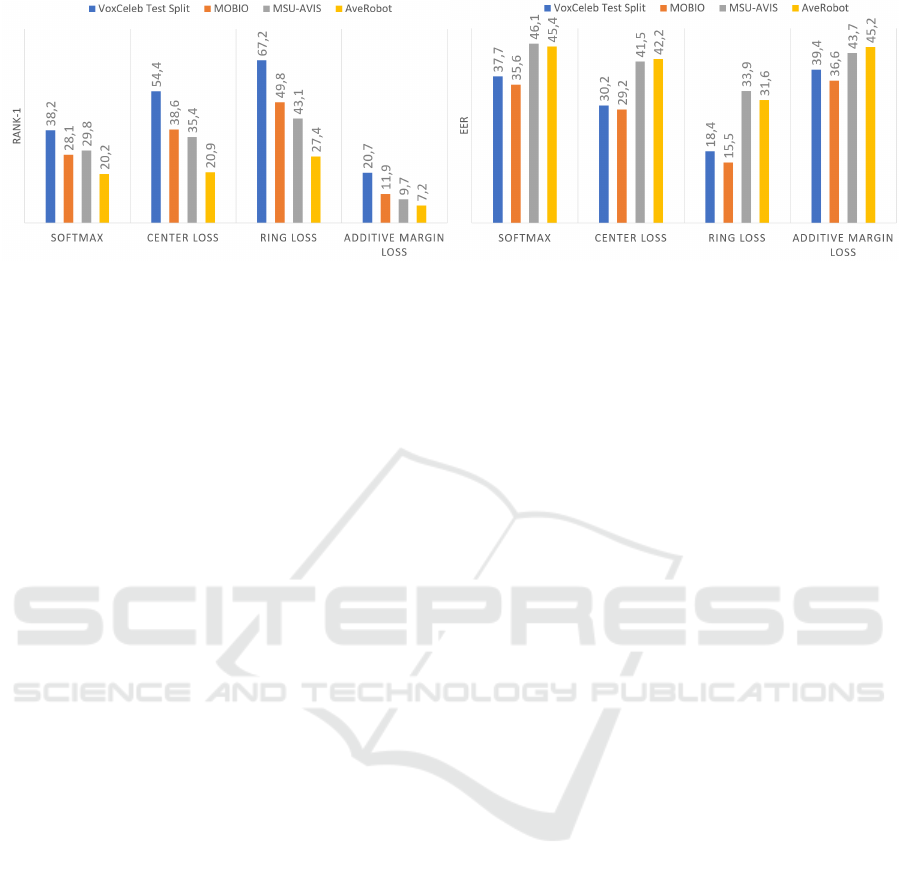
Figure 5: The results obtained by ResNet-50 trained with various loss functions on VoxCeleb Train Split and tested on unheard
users from different datasets for voice re-identification through Rank-1 (left) and verification through EER (right).
spectrograms. The results show that the voice re-
cognition performance is badly affected by the back-
ground noise presented in semi/no-controlled scena-
rios like MSU-AVIS and AveRobot. In particular,
recognizing people from their voices in AveRobot is
more challenging in comparison with the other data-
sets. This observation could derive from the fact that
the audios in AveRobot contain several noisy situati-
ons (e.g., opening doors, background speaking, alarm
sounds). The performance improves in more control-
led scenarios. Furthermore, for voice re-identification
tasks, the gap between AveRobot and the other data-
sets is larger with respect to the face re-identification
task. For re-identification, we achieve between 7.3%
and 27.4% of rank-1 accuracy. It should be noted that,
for voice re-identification, a random guesser reaches
2.5% of rank-1 accuracy. For verification, we get bet-
ween 31.6% and 45.4% of EER. The Angular Margin
loss seems to badly learn the patterns behind spectro-
grams, while it works well for face images. Overall,
the results demonstrate that voice recognition models
suffer the most from the challenging recording condi-
tions with respect to face recognition models.
5 CONCLUSIONS
In this paper, we proposed a pipeline for collecting
audio-visual data under a multi-floor robot coopera-
tion scenario and leveraged it in order to create a
multi-biometric dataset comprising of face and voice
modalities, namely AveRobot, tailored for evaluating
people re-identification and verification capabilities
of robots. It includes 111 participants and over 2,500
short videos. In order to establish benchmark perfor-
mance, different techniques for training deep neural
networks on face and spectrogram images, extracted
directly from the frames and the raw audios, were tes-
ted on this new dataset for re-identification and veri-
fication. The performance on this new dataset were
compared against the performance the same techni-
ques obtain on other traditional audio-visual datasets
from different scenarios. The results demonstrated
that AveRobot appears as challenging due to the un-
controlled conditions and remarked the need of bet-
ter understanding how the existing algorithms react
against in-the-wild operational contexts.
In the next steps, we plan to explore other deep
learning architectures and methodologies to (i) com-
bine sequence of faces/spectrograms coming from the
same recording, (ii) merge information coming from
faces and voices, (iii) mitigate the impact of the con-
ditions posed by our scenario on face and voice re-
identification and verification, and (iv) validate the
developed methods on real-world robot assistance.
ACKNOWLEDGEMENTS
Mirko Marras gratefully acknowledges Sardinia Regi-
onal Government for the financial support of his PhD
scholarship (P.O.R. Sardegna F.S.E. Operational Pro-
gramme of the Autonomous Region of Sardinia, Eu-
ropean Social Fund 2014-2020, Axis III ”Education
and Training”, Thematic Goal 10, Priority of Invest-
ment 10ii, Specific Goal 10.5).
This research work has been partially supported
by the Spanish Ministry of Economy and Compe-
titiveness (TIN2015-64395-R MINECO/FEDER), by
the Office of Economy, Industry, Commerce and Kno-
wledge of the Canary Islands Government (CEI2018-
4), and the Computer Science Department at the Uni-
versidad de Las Palmas de Gran Canaria.
Lastly, we would like to thank Nelson Gonz
´
alez-
Mach
´
ın and Enrique Ram
´
on-Balmaseda for suppor-
ting us during the acquisition of the recordings.
AveRobot: An Audio-visual Dataset for People Re-identification and Verification in Human-Robot Interaction
263

REFERENCES
Barra, S., Casanova, A., Fraschini, M., and Nappi, M.
(2017). Fusion of physiological measures for multi-
modal biometric systems. Multimedia Tools and Ap-
plications, 76(4):4835–4847.
Barra, S., De Marsico, M., Galdi, C., Riccio, D., and We-
chsler, H. (2013). Fame: face authentication for mo-
bile encounter. In Biometric Measurements and Sys-
tems for Security and Medical Applications (BIOMS),
2013 IEEE Workshop on, pages 1–7. IEEE.
Boratto, L., Carta, S., Fenu, G., and Saia, R. (2016). Using
neural word embeddings to model user behavior and
detect user segments. Knowledge-Based Systems,
108:5–14.
Boratto, L., Carta, S., Fenu, G., and Saia, R. (2017).
Semantics-aware content-based recommender sys-
tems: Design and architecture guidelines. Neurocom-
puting, 254:79–85.
Chowdhury, A., Atoum, Y., Tran, L., Liu, X., and Ross,
A. (2018). Msu-avis dataset: Fusing face and voice
modalities for biometric recognition in indoor sur-
veillance videos. In 2018 24th International Con-
ference on Pattern Recognition (ICPR), pages 3567–
3573. IEEE.
Cielniak, G. and Duckett, T. (2003). Person identification
by mobile robots in indoor environments. In Robotic
Sensing, 2003. ROSE’03. 1st International Workshop
on, pages 5–pp. IEEE.
Correa, M., Hermosilla, G., Verschae, R., and Ruiz-del So-
lar, J. (2012). Human detection and identification by
robots using thermal and visual information in domes-
tic environments. Journal of Intelligent & Robotic Sy-
stems, 66(1-2):223–243.
Cosar, S., Coppola, C., Bellotto, N., et al. (2017). Volume-
based human re-identification with rgb-d cameras. In
VISIGRAPP (4: VISAPP), pages 389–397.
Cruz, C., Sucar, L. E., and Morales, E. F. (2008). Real-time
face recognition for human-robot interaction. In Auto-
matic Face & Gesture Recognition, 2008. FG’08. 8th
IEEE International Conference on, pages 1–6. IEEE.
Dom
´
ınguez-Brito, A. C., Cabrera-G
´
amez, J., Hern
´
andez-
Sosa, D., Castrill
´
on-Santana, M., Lorenzo-Navarro,
J., Isern-Gonz
´
alez, J., Guerra-Artal, C., P
´
erez-P
´
erez,
I., Falc
´
on-Martel, A., Hern
´
andez-Tejera, M., and
M
´
endez-Rodr
´
ıguez, J. (2001). Eldi: An agent ba-
sed museum robot. In ServiceRob’2001, European
Workshop on Service and Humanoid Robots, Santo-
rini, Greece.
Faber, F., Bennewitz, M., Eppner, C., G
¨
or
¨
og, A., Gon-
sionr, C., Joho, D., Schreiber, M., and Behnke, S.
(2009). The humanoid museum tour guide Robo-
tinho. In IEEE International Symposium onRobot and
Human Interactive Communication (RO-MAN), pages
891–896.
Fenu, G. and Marras, M. (2018). Controlling user access
to cloud-connected mobile applications by means of
biometrics. IEEE Cloud Computing, 5(4):47–57.
Fenu, G., Marras, M., and Boratto, L. (2018). A multi-
biometric system for continuous student authentica-
tion in e-learning platforms. Pattern Recognition Let-
ters, 113:83–92.
Fenu, G. and Nitti, M. (2011). Strategies to carry and for-
ward packets in vanet. In International Conference on
Digital Information and Communication Technology
and Its Applications, pages 662–674. Springer.
Hansen, J. H. and Hasan, T. (2015). Speaker recognition by
machines and humans: A tutorial review. IEEE Signal
processing magazine, 32(6):74–99.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hristoskova, A., Ag
¨
uero, C. E., Veloso, M., and De Turck,
F. (2012). Personalized guided tour by multiple robots
through semantic profile definition and dynamic redis-
tribution of participants. In Proceedings of the 8th In-
ternational Cognitive Robotics Workshop at AAAI-12,
Toronto, Canada.
Hu, J., Shen, L., and Sun, G. (2017). Squeeze-
and-excitation networks. arXiv preprint
arXiv:1709.01507, 7.
Irfan, B., Lyubova, N., Ortiz, M. G., and Belpaeme, T.
(2018). Multi-modal open-set person identification in
hri.
Jain, A., Hong, L., and Pankanti, S. (2000). Biometric iden-
tification. Communications of the ACM, 43(2):90–98.
Koide, K. and Miura, J. (2016). Identification of a speci-
fic person using color, height, and gait features for a
person following robot. Robotics and Autonomous Sy-
stems, 84:76–87.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Liu, H., Hu, L., and Ma, L. (2017). Online RGB-D person
re-identification based on metric model update. CAAI
Transactions on Intelligence Technology, 2(1):48–55.
L
´
opez, J., P
´
erez, D., Santos, M., and Cacho, M. (2013a).
Guidebot. A tour guide system based on mobile ro-
bots. International Journal of Advanced Robotic Sys-
tems, 10.
L
´
opez, J., P
´
erez, D., Zalama, E., and Gomez-Garcia-
Bermejo, J. (2013b). Bellbot - a hotel assistant system
using mobile robots. International Journal of Advan-
ced Robotic Systems, 10.
Lukic, Y., Vogt, C., D
¨
urr, O., and Stadelmann, T. (2016).
Speaker identification and clustering using convoluti-
onal neural networks. In 2016 IEEE 26th Internatio-
nal Workshop on Machine Learning for Signal Pro-
cessing (MLSP), Vietri sul Mare, Italy, 13-16 Sept.
2016. IEEE.
Mac, T. T., Copot, C., Tran, D. T., and De Keyser, R. (2017).
A hierarchical global path planning approach for mo-
bile robots based on multi-objective particle swarm
optimization. Applied Soft Computing, 59:68–76.
Martinson, E. and Lawson, W. (2011). Learning speaker re-
cognition models through human-robot interaction. In
Robotics and Automation (ICRA), 2011 IEEE Interna-
tional Conference on, pages 3915–3920. IEEE.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
264

McCool, C., Marcel, S., Hadid, A., Pietik
¨
ainen, M., Mate-
jka, P., Cernock
`
y, J., Poh, N., Kittler, J., Larcher, A.,
Levy, C., et al. (2012). Bi-modal person recognition
on a mobile phone: using mobile phone data. In Mul-
timedia and Expo Workshops (ICMEW), 2012 IEEE
International Conference on, pages 635–640. IEEE.
Munaro, M., Fossati, A., Basso, A., Menegatti, E.,
and Van Gool, L. (2014). One-shot person re-
identification with a consumer depth camera. In Per-
son Re-Identification, pages 161–181. Springer.
Nagrani, A., Chung, J. S., and Zisserman, A. (2017). Voxce-
leb: a large-scale speaker identification dataset. arXiv
preprint arXiv:1706.08612.
Ouellet, S., Grondin, F., Leconte, F., and Michaud, F.
(2014). Multimodal biometric identification system
for mobile robots combining human metrology to face
recognition and speaker identification. In Robot and
Human Interactive Communication, 2014 RO-MAN:
The 23rd IEEE International Symposium on, pages
323–328. IEEE.
Rosenthal, S., Biswas, J., and Veloso, M. (2010). An ef-
fective personal mobile robot agent through symbi-
otic human-robot interaction. In Proceedings of the
9th International Conference on Autonomous Agents
and Multiagent Systems: volume 1-Volume 1, pages
915–922. International Foundation for Autonomous
Agents and Multiagent Systems.
Schroff, F., Kalenichenko, D., and Philbin, J. (2015). Fa-
cenet: A unified embedding for face recognition and
clustering. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 815–
823.
Shiomi, M., Kanda, T., Ishiguro, H., and Hagita, N. (2007).
Interactive humanoid robots for a science museum.
IEEE Intelligent systems, 22(2):25–32.
Sinha, A., Chakravarty, K., and Bhowmick, B. (2013). Per-
son identification using skeleton information from ki-
nect. In Proc. Intl. Conf. on Advances in Computer-
Human Interactions, pages 101–108.
Sun, Y., Liang, D., Wang, X., and Tang, X. (2015). Dee-
pid3: Face recognition with very deep neural net-
works. arXiv preprint arXiv:1502.00873.
Susperregi, L., Fernandez, I., Fernandez, A., Fernandez, S.,
Maurtua, I., and de Vallejo, I. L. (2012). Interacting
with a robot: a guide robot understanding natural lan-
guage instructions. In Ubiquitous Computing and Am-
bient Intelligence, pages 185–192. Springer.
Taigman, Y., Yang, M., Ranzato, M., and Wolf, L. (2014).
Deepface: Closing the gap to human-level perfor-
mance in face verification. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1701–1708.
Thrun, S., Bennewitz, M., Burgard, W., Cremers, A. B.,
Dellaert, F., Fox, D., Hahnel, D., Rosenberg, C., Roy,
N., Schulte, J., et al. (1999). Minerva: A second-
generation museum tour-guide robot. In Robotics and
automation, 1999. Proceedings. 1999 IEEE internati-
onal conference on, volume 3. IEEE.
Trahanias, P., Burgard, W., Argyros, A., H
¨
ahnel, D., Balt-
zakis, H., Pfaff, P., and Stachniss, C. (2010). TOUR-
BOT and WebFAIR: Web-operated mobile robots for
tele-presence in populated exhibitions. IEEE Robotics
and Automation Magazine, 12(2):77–89.
Troniak, D., Sattar, J., Gupta, A., Little, J. J., Chan, W.,
Calisgan, E., Croft, E., and Van der Loos, M. (2013).
Charlie rides the elevator–integrating vision, naviga-
tion and manipulation towards multi-floor robot loco-
motion. In Computer and Robot Vision (CRV), 2013
International Conference on, pages 1–8. IEEE.
Wang, F., Cheng, J., Liu, W., and Liu, H. (2018a). Addi-
tive margin softmax for face verification. IEEE Signal
Processing Letters, 25(7):926–930.
Wang, Y., Shen, J., Petridis, S., and Pantic, M. (2018b). A
real-time and unsupervised face re-identification sy-
stem for human-robot interaction. Pattern Recognition
Letters.
Wen, Y., Zhang, K., Li, Z., and Qiao, Y. (2016). A discrimi-
native feature learning approach for deep face recog-
nition. In European Conference on Computer Vision,
pages 499–515. Springer.
Zhang, K., Zhang, Z., Li, Z., and Qiao, Y. (2016). Joint
face detection and alignment using multitask casca-
ded convolutional networks. IEEE Signal Processing
Letters, 23(10):1499–1503.
Zheng, W.-S., Gong, S., and Xiang, T. (2013). Reidenti-
fication by relative distance comparison. IEEE tran-
sactions on pattern analysis and machine intelligence,
35(3):653–668.
Zheng, Y., Pal, D. K., and Savvides, M. (2018). Ring loss:
Convex feature normalization for face recognition. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 5089–5097.
AveRobot: An Audio-visual Dataset for People Re-identification and Verification in Human-Robot Interaction
265
