
A Method of Terrain Crack Removal Suited for Large Differences in
Boundary LoD
Chengming Li, Zhendong Liu and Xiaoli Liu
Chinese Academy of Surveying and Mapping, Beijing, China
Keywords: Terrain Cracks, Boundary LoD Level, Elevation Adjustment, Quadtree Data Structure, Terrain Crack
Removal, Lighting Continuity.
Abstract: Terrain crack removal is an unavoidable problem that must be solved in real-time three-dimensional (3D)
terrain rendering. Conventional elevation adjustment-based crack removal methods are plagued by a number
of problems, including restrictions associated with level of detail (LoD) differences, computational
inefficiency and lighting discontinuities. To address these issues, we propose a crack elimination method that
is suited for large differences in boundary LoD. The first step in this method is the construction of terrain
quadtrees that contain edge and angle adjacency information. These structures are then updated in real time.
The second step is to modify the boundary mesh vertices using linear interpolation, which allows for LoD
differences greater than 1 between adjacent tiles. Finally, the vertex normals of the mesh vertices of the terrain
block are calculated and evaluated. Our method was experimentally validated using topographical data from
a mountainous region in Sichuan Province, and the results provide evidence that supports the reliability and
superiority of the proposed method compared to the conventional method.
1 INTRODUCTION
The occurrence of terrain cracks in the level of detail
(LoD) rendering technique is caused by inherent
differences in the LoD. When two adjacent terrain
meshes have different LoDs, the elevations of their
boundary grids will not be fully consistent, which
causes the appearance of gaps in real-time terrain
rendering processes (Yin et al, 2006). Currently, the
most common method of terrain data simplification
(both in China and abroad) is view-dependent
continuous LoD rendering (Bulatov et al, 2013),
which entails the use of view-dependent LoDs in
terrain representations. Therefore, the elimination of
terrain cracks is an unavoidable problem that must be
solved in real-time three-dimensional (3D) rendering
processes.
The most common methods of terrain crack
removal are the adjustment of mesh boundary vertices
(Han et al, 2008), patching methods (Li et al, 2013.
Wan et al, 2015) and template decomposition (Xu etal,
2005. Wang et al, 2007). Since the adjustment of
mesh boundary vertices does not require the creation
of additional meshes, these methods are well suited
for the representation of complex 3D terrain. Zhao et
al. (2012) investigated a method for the seamless
expression of global multiresolution digital elevation
models (DEMs) based on spherical degenerate
quadtree grids. They designed an adaptive algorithm
that seamlessly stitches cracks within and between
quadtree blocks. The underlying mechanism of this
algorithm involves merging the nodes of terrain
blocks that have low LoDs among adjacent terrain
blocks (Zhao et al, 2012). However, the
aforementioned methods require the terrain to be
completely retraversed and the relevant nodes to be
retriangulated, which eliminates the independence of
these nodes (Liu et al, 2010). These methods may also
disrupt the rules that are normally used to control the
terrain LoD (Zhao et al, 2002). To address these
issues, we have proposed a method of terrain crack
removal that can handle large differences in boundary
LoD based on analyses of quadtree data structures
and the rules for controlling the LoD.
The remaining sections of this paper are organized
as follows. The second section describes the current
method of adjusting mesh boundary vertices and the
inadequacies of this method. The third section
provides a detailed description of the improved crack
removal method proposed in this paper. The
experimental validation of this method is presented in
Section 4. The fifth section provides a discussion of
the method and the conclusions of the study.
60
Li, C., Liu, Z. and Liu, X.
A Method of Terrain Crack Removal Suited for Large Differences in Boundary LoD.
DOI: 10.5220/0007703000600070
In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2019), pages 60-70
ISBN: 978-989-758-371-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 RELATED WORK
2.1 Current Method of Adjusting Mesh
Boundary Vertices
Methods for adjusting mesh boundary vertices are
being continuously developed and refined by
researchers around the world. Notably, Zhao et al.
(2002) proposed a crack removal method based on the
adjustment of elevation values. A basic description of
this method is given as follows.
The method of Zhao et al. uses a hierarchical
segmentation algorithm that eliminates cracks by
instituting dependencies between vertices. When this
method is used, the addition of a vertex will affect the
parent node and adjacent node. Hence, vertex
selection/elimination and mesh generation must be
performed separately, and the independent rendering
of each terrain block is difficult in this method. Since
triangulation is not used in this method, operations
such as the splitting of high-LoD meshes or the
merging of low-LoD meshes cannot be performed,
and this limitation disrupts the structure of the terrain
mesh and eliminates node independence. The
seamless stitching of terrain blocks is achieved by
altering the elevation values of the vertices that are
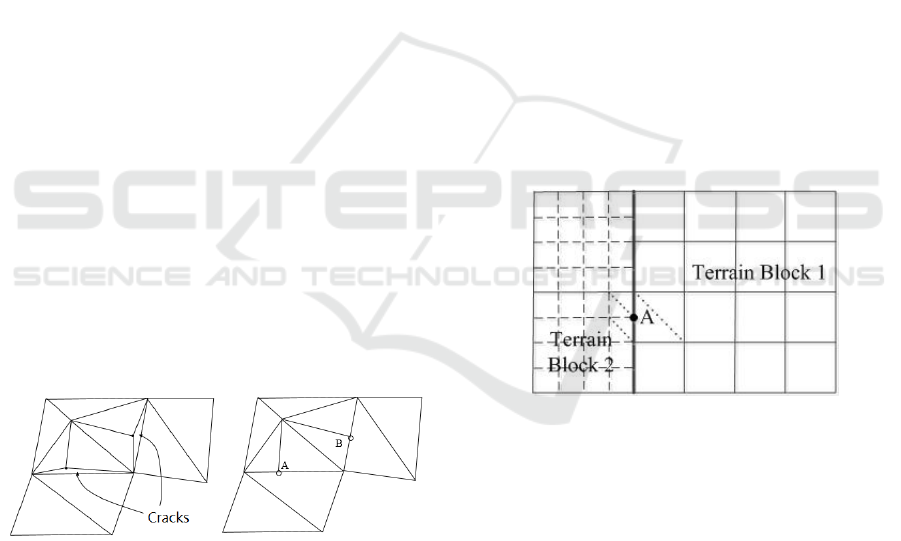
responsible for inducing cracks. Fig. 1(a) is an
example of terrain cracks. In this case, adjustments
will be made to the boundary vertices that belong to
the node that has a higher level of resolution. In Fig.
1(b), the elevations of the A and B vertices (which
belong to the upper left node) have been recalculated
and reevaluated according to the boundary vertices of
the adjacent node.
(a) (b)
Figure 1: Crack elimination via the adjustment of elevation
values: (a)Crack generation and (b) T-joints.
2.2 Inadequacies of the Current
Method
Elevation adjustment-based crack elimination
algorithms can be used to remove cracks by adjusting
the elevation of mesh boundary vertices without
requiring triangulation. However, certain aspects of
these algorithms remain problematic.
(1) Cracks can be generated by adjacent nodes
with LoDs that are different by more than 1, but this
scenario is not accounted for in current elevation
adjustment-based crack removal algorithms.
Furthermore, this scenario is likely to occur in
complex terrain areas during real-time 3D terrain
rendering.
(2) During crack removal, real-time CPU
calculations are required to traverse the entirety of the
terrain. This process is a highly time consuming when
massive terrain data are involved.
(3) After the vertex elevations around the cracks
have been adjusted by these algorithms, certain
discontinuities will become apparent in the lighting of
the terrain. In Fig. 2, for instance, the right side of
boundary vertex A (terrain block 1) is not included in
any triangular mesh. The right side of vertex A will
therefore be excluded during the calculation of vertex
normals, which subsequently leads to discontinuities
between the vertex normal of A and the adjacent
vertices. This issue will subsequently affect the
terrain lighting calculations in 3D scenes and lead to
errors in illumination-based terrain analyses.
Figure 2: Lighting calculation for a pair of terrain blocks.
3 IMPROVED TERRAIN CRACK
REMOVAL METHOD
The crack removal method we have proposed is
suitable for large boundary LoD differences and
consists of three primary steps: (1) the construction of
terrain quadtree structures that contain edge and angle
adjacency information and an algorithm for real-time
updates, (2) the elimination of cracks caused by large
differences in LoD, and (3) the calculation and
updating of the vertex normals of terrain blocks.
A Method of Terrain Crack Removal Suited for Large Differences in Boundary LoD
61
3.1 The Construction of a Quadtree
Structure That Contains Adjacency
Information and the Dynamic
Updating of This Structure
Differences in the rendering precision of adjacent
terrain nodes are the root cause of terrain cracks (Fu
et al, 2012.WIESEMANN et al, 2005). Therefore, the
key to eliminating terrain cracks is the accurate
recognition and determination of terrain node
adjacencies when real-time LoD terrain rendering is
implemented based on quadtree features. The
following definitions have been provided to facilitate
the description of the algorithm.
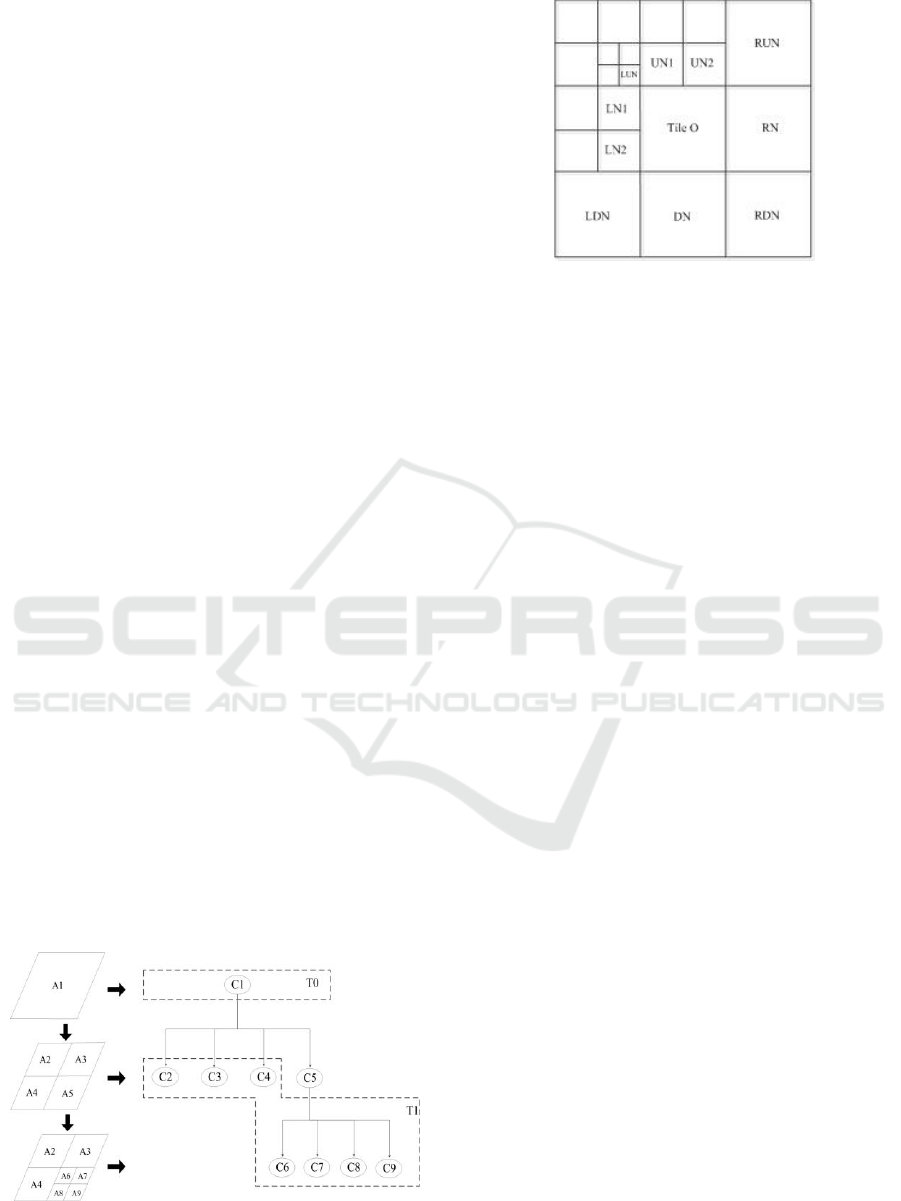
(1) Terrain nodes, such as A1 and A2 in Fig. 3, are
simply referred to as tiles. A unified code is used to
describe the LoD, row and column of each tile, i.e.,
Tilecode = (LoD, TileX, TileY). Each tile contains
M×M vertices, with M being a positive integer that
represents the number of grid points on a given edge.
(2) In a terrain quadtree, "parentless" nodes, such
as C1 in Fig. 3, are referred to as root nodes, and
"childless" nodes, such as C2, C6 and C7 in Fig. 3,
are referred to as leaf nodes.
(3) The tiles that surround each tile are
categorized either as edge neighbors or corner
neighbors based on their spatial relationships. Edge
neighbors can be classified as left edge neighbors
(LN), upper edge neighbors (UN), right edge
neighbors (RN), and bottom edge neighbors (DN).
Corner neighbors may be classified as left upper
corner neighbors (LUN), right upper corner neighbors
(RUN), right lower corner neighbors (RDN), and
lower bottom edge neighbors (LDN). An example of
these spatial relationships is illustrated in Fig. 4.
(4) In a quadtree structure, "child" nodes on the
upper left, upper right, bottom right and bottom left
corners of a "parent" node are referred to as LUChild,
RUChild, RDChild and LDChild, respectively.
Figure 3: Terrain quadtree structure.
Figure 4: Definitions of adjacency relationships.
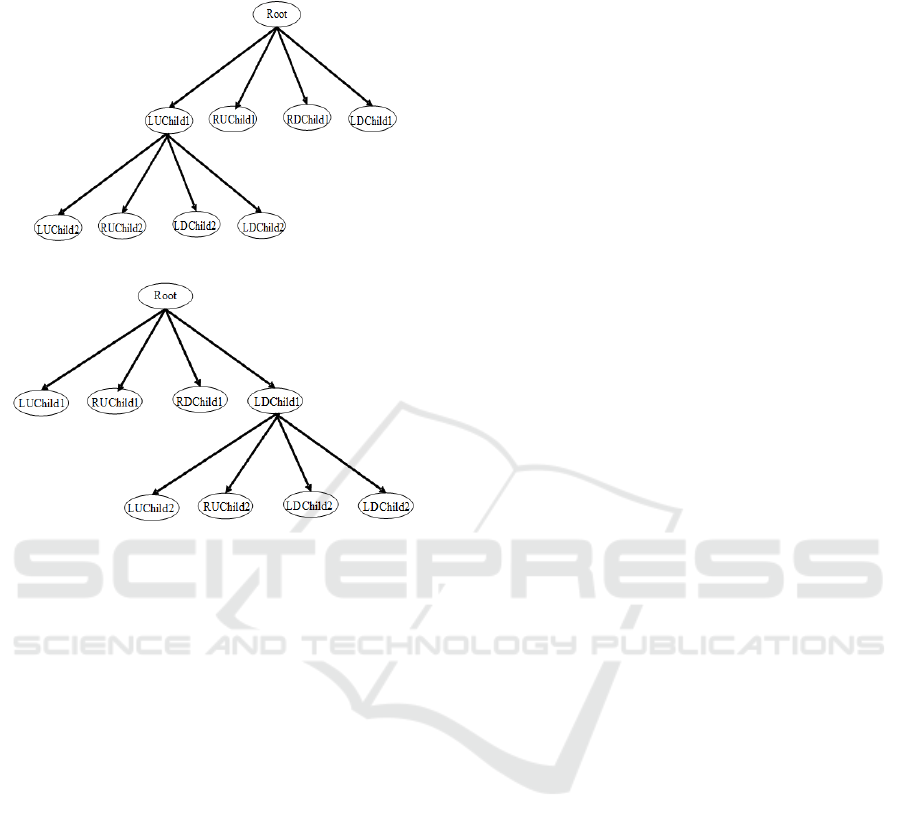
3.2 The Construction and Dynamic
Updating of Quadtree Structures
During the rendering of a 3D terrain scene, terrain
quadtrees will be constructed and dynamically
updated according to the rules of view-dependent
LoD control (Feng et al, 2010. Lindstrom et al, 2001).
A change in view will therefore affect the merging
and splitting of leaf nodes in a quadtree. For instance,
Fig. 5(a) describes a terrain quadtree that corresponds
to the view being close to the upper-left part of the
terrain, and Fig. 5(b) illustrates the changes in the
quadtree when the view shifts from the upper-left part
of the terrain to the bottom-left part. When the
quadtree changes from Fig. 5(a) to Fig. 5(b), the
LDChild1 tile in Fig. 5(b) will split into four
"children" tiles, and the LUChild2, RUChild2,
RDChild2 and LDChild2 tiles in Fig. 5(a) will be
merged. This process corresponds to the rendering of
the "parent" tile (LUChild1).
The dynamic updating of adjacency information
associated with the generation of "children" tiles or
the merging of "parent" tiles (when the "parent" tile
is being rendered) is a crucial step in crack removal.
This adjacency processing algorithm can be divided
into two modules according to the intrinsic
characteristics of each leaf node: an algorithm that
processes the adjacency information of split leaf
nodes, and an algorithm that processes the adjacency
information of merged leaf nodes.
Since terrain cracks only occur at inter-tile
boundaries, the ultimate purpose of crack removal is
to ensure that the four edges and corners of a tile are
consistent with those of adjacent tiles. The
assessment of adjacency information is based on the
spatial and positional relationships of the tiles. To
facilitate the computations of the crack removal
algorithm, we define a marker called "Dirty" for the
adjacency information of each edge and corner of
every tile. Dirty has two possible states: active or
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
62
sleeping. The specific procedure is given in the
following subsection.
(a)
(b)
Figure 5: An illustration of a terrain quadtree being
updated: (a) View located at the upper-left part of the terrain
and (b) View located at the bottom-left part of the terrain.
3.2.1 The Processing of Adjacency
Information for Split Leaf Nodes
The location of a split leaf node relative to its "parent"
tile is determined, and the adjacency information of
the former is then acquired using its location and
spatial/positional relationships. The determination of
the corner and edge neighbors of a "child" tile located
at the upper-left corner of a "parent" tile (LUChild) is
described below.
(1) The determination of edge neighbors and their
states
Since the split leaf node is an upper left "child"
tile, the tiles that neighbor the split leaf node on its
right and bottom edges must belong to the same
"parent" and have the same level of resolution. Hence,
the "Dirty" crack removal markers of the following
edges are set to the sleeping state: the right and
bottom edges of the current tile, the left edge of the
right-edge neighbor, and the upper edge of the
bottom-edge neighbor. As the left and upper-edge
neighbors have different "parents" than the current
tile, the next step is to find the "parents" of the left
and upper edge neighbors of the current and to
subsequently perform calculations for the left and
upper-edge neighbors of the current tile. The "Dirty"
crack removal markers of the edges associated with
all the previously mentioned tiles are then set to the
active state.
(2) Determination of corner neighbors and their
states
As before (i.e., during the determination of edge
neighbors and their states), the bottom-right corner
neighbor of the upper-left corner "child" tile has the
same parent as the current tile and therefore the same
level of resolution. Thus, the "Dirty" crack removal
markers of the bottom-right corner of the current tile
and the upper-right corner of the bottom-right corner
neighbor are set to the sleeping state. Since the upper
left, upper right, and bottom left corner neighbors
belong to different "parents" than the current tile, the
next step is to search for the parents of the upper-left,
upper-right and bottom-left corner neighbors of the
current tile. The corner neighbors of the current node
are then identified, and the "Dirty" crack removal
markers of the corners associated with the current tile
are set to the active state.
3.2.2 The Processing of Adjacency
Information for Merged Leaf Nodes
Since four "children" are merged to form a "parent",
it is necessary to update the adjacency information of
the neighbors of these "children" in sequential
fashion. Again, the "child" tile in the upper-left corner
(LUChild) is used as an example to explain this
process.
(1) The determination of edge neighbors and their
states
The adjacency information of the right-edge and
bottom-edge neighbors does not require further
processing because these neighbors have the same
parent as the current LUChild tile and because these
three tiles are also simultaneously merged. If the left-
edge (LN) and upper-edge (UN) neighbors have the
same LoD as the LUChild tile, the adjacency
information of the LN and UN tiles will change after
the 4 "children" tiles have been merged. The right-
edge neighbor of LN and the upper-edge neighbor of
UN are set as the parent of LUChild. If LN and UN
have "children" tiles, the adjacency information of
their associated edges will then need to be recursively
updated. The "Dirty" markers of the corresponding
edges are also simultaneously set to the active state.
(2) The determination of corner neighbors and
their states
A Method of Terrain Crack Removal Suited for Large Differences in Boundary LoD
63
As before, the adjacency information of the
bottom-right corner neighbor is not processed since it
has the same "parent" as the current tile (LUChild). If
the upper-left corner neighbor (LUN) has the same
LoD as LUChild, the bottom-right corner neighbor of
LUN is then designated the "parent" of LUChild. If
LUN has any "children", the adjacency information
of the relevant corners then needs to be recursively
updated. If an upper-right corner neighbor (RUN) or
bottom-left corner neighbor (LDN) exists and has the
same LoD as LUChild, the corner adjacencies related
to these tiles must be set to null since they are not
spatially adjacent to the corners of the "parent" of
LUChild (like the O and UN2 tiles in Fig. 4).
Similarly, if RUN and LDN have children, their
corner adjacencies also need to be recursively
updated.
3.3 The Removal of Cracks with Large
Differences in Lod
To satisfy the requirements for the real-time
rendering of massive terrain data, terrain frustum
culling is used to perform a preliminary investigation
of the range of tiles that require crack removal when
the terrain renders and quadtrees of each frame are
being constructed. The adjacent tiles and “Dirty”
state of the newly added leaf nodes are determined;
the nodes that have an active “Dirty” state may
contain cracks, and these are stored in the crack repair
set (CrackTileVector). After the preliminary
investigation is complete, crack removal without LoD
difference constraints is performed on the tiles of
CrackTileVector.
Our crack removal algorithm without LoD
difference constraints can be summarized as follows.
Since terrain cracks can only occur at tile boundaries,
the (four) edges and corners of some given tile are
sequentially processed, and linear interpolation is
used to ensure that the node elevations of the tile that
is being processed are consistent with the node
elevations of the adjacent tiles (which may have
different LoDs). The steps in processing the left edge
of a tile are used as an example to explain the specific
processes of the proposed algorithm.
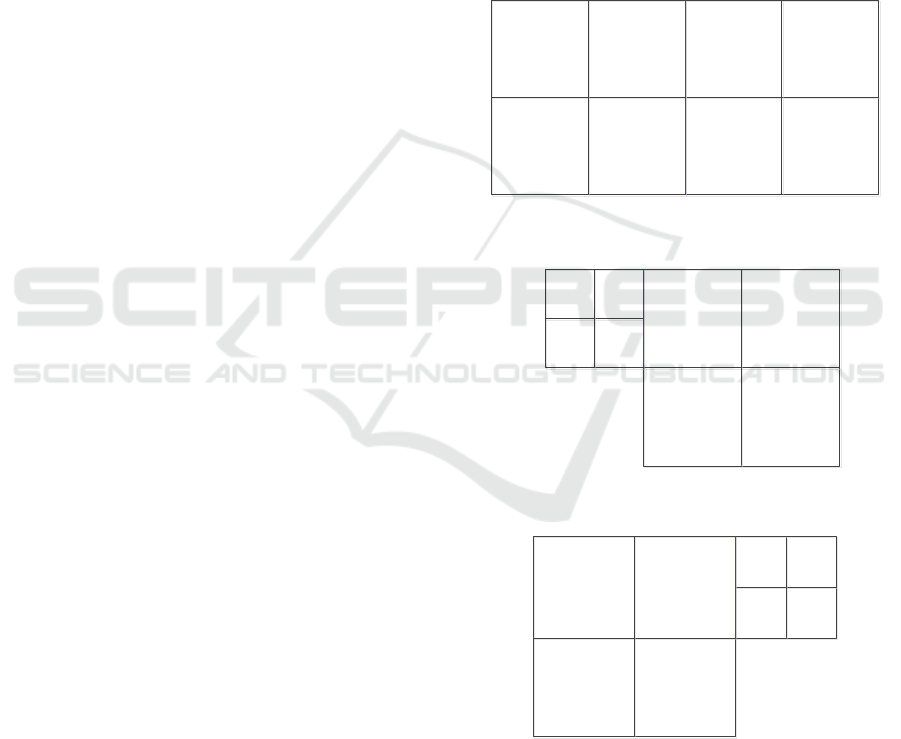
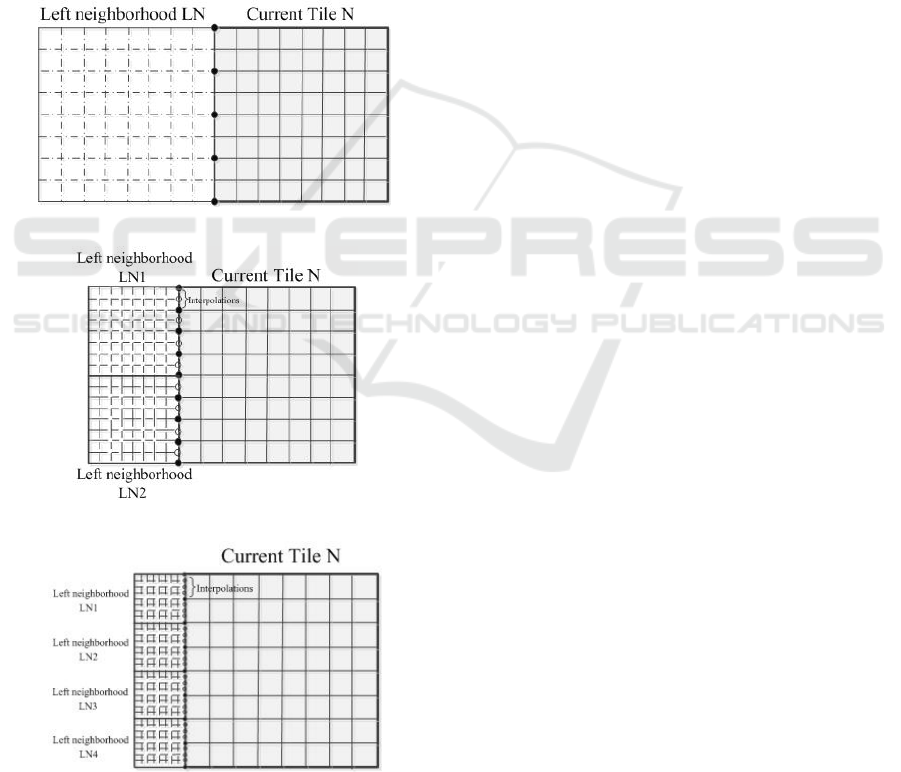
Step 1: Investigate the left-edge neighbor (a leaf
node) of the current tile using dynamically updated
tile adjacency information.
If the current node is N, the adjacency array of the
left neighbor of N is Lvec() (the left-edge neighbor
can exist in various configurations, as shown in Figs.
6(a), 6(b) and 6(c); nevertheless, the processing
procedure is the same in each case). To find the left-
edge neighbor of N in a 3D terrain scene, each
member of the Lvec(array) is checked for “children”.
If a member has “children”, the upper-right and
bottom-right “children” of this member (LChild1
and LChild2, respectively) are assigned to the current
node (N) and treated as the left-edge neighbor of N.
LChild1 and LChild2 are then recursively processed
using these steps until a leaf node is reached and
recorded in the neighbor array, LYvec[]. After the
left-edge neighbor of N has been configured, the
right-edge neighbor of the left-edge neighbor is
simultaneously designated N.
Node of the current tile
The left neighbor node of the currently
displayed scene
(a)
Node of the current tile
The left neighbor node of the
currently displayed scene
(b)
Node of the current tile
The left neighbor node of the currently
displayed scene
(c)
Figure 6: Possible configurations for the left-edge neighbor
of a tile: (a) N and L have the same LoD, (b) N has a greater
LoD than L and (c)N has a lower LoD than L.
Step 2: For the array of left-edge neighbors
(LYvec[]),perform the crack removal operation.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
64
If there is only one node in LYvec[], the left-edge
neighbor and N then have the same LoD, and the
vertex relations between the tiles have a strict one-to-
one correspondence, as shown in Fig. 7(a). In this
case, every vertex on the inter-tile boundary can be
directly traversed to determine whether the vertices
have the same elevation. If the elevations are not
equal, the elevation of N is used as a reference, and
the elevation values of the vertices are assigned to the
corresponding vertices of the corresponding
neighbors. If LYvec[] only has 2 nodes and the LoDs
of N and its neighbor are different by 1, the relation-
ship between the boundary vertices of these tiles is
then described by Fig. 7(b). Additionally, in this case,
the length of two neighboring grids is exactly the
length of a single N grid. Equidistant linear interpola-
(a)
(b)
(c)
Figure 7: Possible configurations for the left-edge neighbor
of a tile: (a)Same LoD, (b)Difference of 1 in LoD and
(c)Difference of 2 in LoD.
ion is then performed on the vertices of N to obtain
the midpoint elevations between each pair of vertices
on the boundary of N; these elevation values are then
assigned to the neighboring vertices. If LYvec has 4
nodes and the difference between the LODs of N and
the neighbor node is n (n > 1), the relationship
between vertices of these tiles is as shown in Fig. 7(c)
(n = 2). This figure illustrates that the length of two
grids in the adjacent tile is 1/n the length of a grid in
N. The grid points of N that are closest to the
neighboring tile are then calculated, and the grid
edges of N are divided in half to form 2n nodes. The
linear interpolation algorithm is used to calculate the
elevations of every node, which are then assigned to
the neighboring vertices.
Since the vertex normals of the boundary mesh
vertices must be recalculated, the “Dirty” markers
of vector normals corresponding to vertices that still
require crack removal are set to the active state.
The proposed crack removal algorithm can be
used without any constraints regarding the difference
in boundary LoD between adjacent nodes. In
addition, our method does not require the rendering
of additional terrain patches, which helps to preserve
actual changes in terrain elevation.
3.4 The Updating of Vertex Normals in
Boundary Areas
Lighting discontinuities may occur at mesh
boundaries after the elevations of vertices at terrain
cracks have been adjusted (Han et al, 2012). After the
terrain cracks have been removed, the vertex normals
of the boundary vertices that participated in the crack
removal operation must be recalculated and re-
evaluated. This process can be described as follows.
Step 1: CrackTileVector is sequentially traversed,
and all the vertices on the four edges of each tile are
processed to determine whether the “Dirty” marker
of the vertex normal is set to the active state. If the “
Dirty ” marker is active, proceed to Step 2;
otherwise, continue to the next vertex.
Step 2: Investigate the 8 vertices that are
connected to this vertex by a triangular mesh, e.g., the
8 vertices around A in Fig. 8. If any of these vertices
are missing, proceed to Step 3 to pad the vertices;
otherwise, proceed directly to Step 4.
Step 3: Vertex padding. Like the crack removal
algorithm, the first step in the padding process is to
determine the LoD difference between the current tile
and an adjacent tile. An analogous subdivision is
performed via linear interpolation of the grids of the
A Method of Terrain Crack Removal Suited for Large Differences in Boundary LoD
65
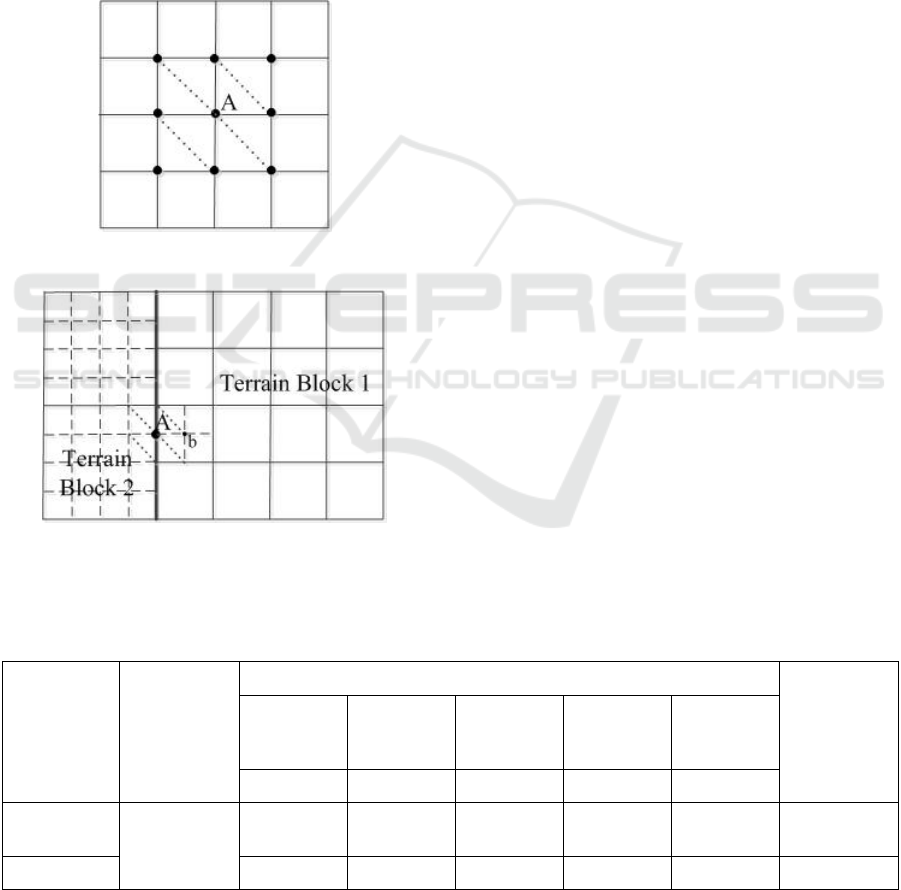
tile with the lower LoD to generate a corresponding
set of vertices in the former tile. Fig. 9 shows that the
grids around the boundary of terrain block 1 should
be subdivided, so that a vertex (b) can be identified
on the right side of boundary point A to participate in
the construction of a triangular mesh.
Step 4: Using the current vertex as the center, the
normal components of each of the 8 directions from
the current vertex are sequentially calculated. These
components are then summed and normalized.
Finally, the vertex normals of the current vertex are
evaluated according to the results of these
calculations.
Figure 8: The vertices associated with point A.
Figure 9: Analogous subdivision of boundary grids.
4 EXPERIMENTS AND
ANALYSIS OF RESULTS
4.1 Experimental Data and
Environment
The proposed terrain crack removal algorithm was
embedded in the NewMap software platform
developed by the Chinese Academy of Surveying and
Mapping. The effectiveness of the method was then
tested using the terrain data from a typical
mountainous region in Sichuan Province. The
elevation data were obtained from the Shuttle Radar
Topography Mission (SRTM), with a coordinate
range of (97.5°~108.5°E, 26.2°~34.1°N); the
horizontal and vertical resolutions of the data were 90
m and 0.1 m, respectively. The image data were
derived from the terrestrial remote sensing data from
Landsat. The multiresolution elevation and image
quadtree pyramids were constructed using NewMap
TerrainPublish software, and the sizes of these
pyramids were 15.76 GB and 63.34 GB, respectively.
The hardware environment of this experiment was a
PC equipped with a 2.60 GHz Pentium Dual Core
E5300 CPU, 1.96 GB of internal storage, and a
Nvidia GeForce 6800 graphics card.
4.2 Results and Analysis
4.2.1 Validating the Reliability of the
Proposed Method
The proposed method was compared to the elevation
adjustment-based crack removal method (i.e., the
conventional method) to validate the reliability of our
method. A random region was selected from the
experimental data to compare the effectiveness of
these methods in removing terrain cracks. The results
of this experiment are shown in Table 1.
Table 1: Comparison of crack removal effectiveness.
Total number
of tiles
Number of terrain cracks
Rate of
terrain crack
removal
LoD
difference
of 1
LoD
difference
of 2
LoD
difference
of 3
LoD
difference
of 4
Total
number of
cracks
2057
1080
384
64
3585
Conventiona
l method
17072
2057
-
-
-
2057
57.38%
Our method
2057
1080
384
64
3585
100%
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
66
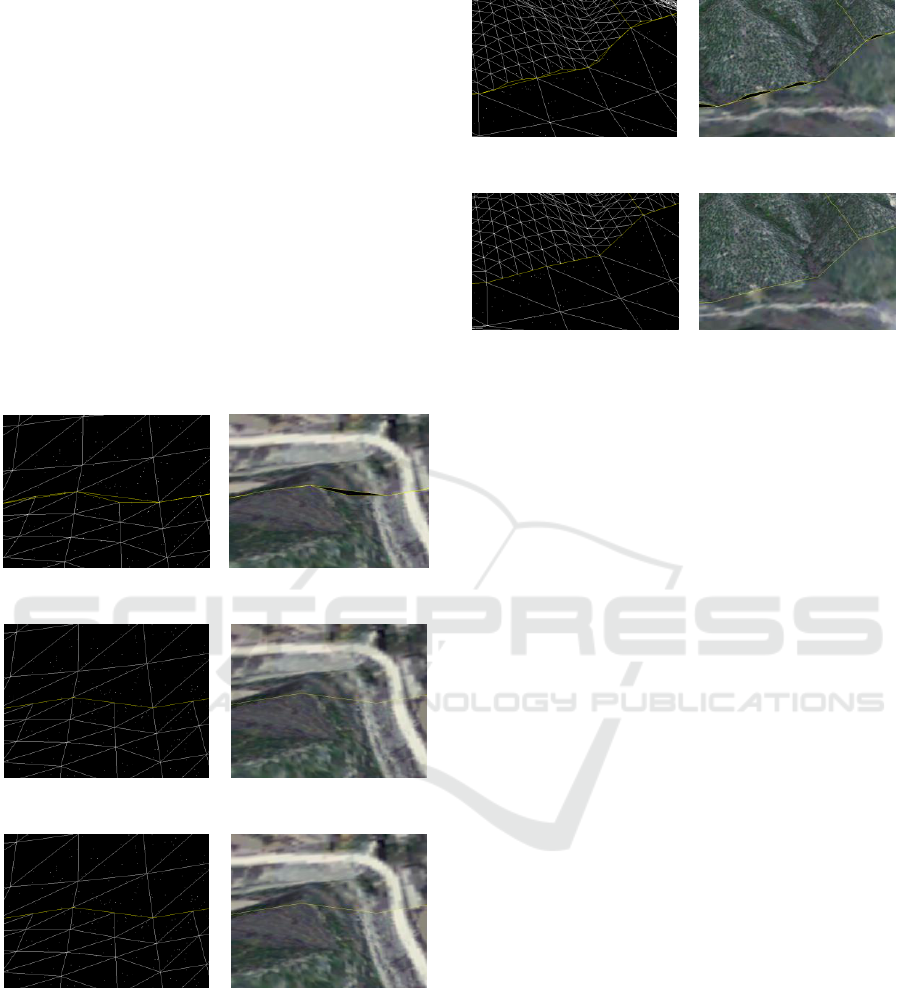
Table 1 shows that there are large differences in
LoD around the boundaries where terrain cracks
occur. Terrain cracks with an LoD difference of 1
account for 57.38% of the total number of terrain
cracks in the experimental area. The conventional
method successfully eliminates all terrain cracks
with an LoD difference of 1 but is unable to process
terrain cracks with LoD differences greater than 1.
Our method is able to completely eliminate all
terrain cracks with LoD differences of 1 and terrain
cracks with LoD differences greater than 1.
Specifically, a terrain crack removal rate of 100%
was achieved in this area using the proposed method.
Figs. 10, 11 and 12 illustrate the effectiveness of the
aforementioned methods in removing terrain cracks
with LoD differences of 1, 2 and greater than 2,
respectively.
(a) (b)
(c) (d)
(e) (f)
Figure 10: Comparison of our method and the conventional
method for the removal of terrain cracks with an LoD
difference of 1:(a)Terrain crack with an LoD difference of
1, (b)Visualization of the terrain crack, (c)Results of crack
removal using the conventional method, (d)Results of crack
removal using the conventional method, (e)Results of crack
removal using our method and (f)Visualized result of crack
removal using our method.
(a) (b)
(c) (d)
Figure 11: The effectiveness of our method in removing
terrain cracks with an LoD difference of 2 : (a)Terrain
cracks with an LoD difference of 2, (b)Visualization of
terrain cracks, (c)Results of terrain crack removal using our
method and (d)Visualized result of terrain crack removal
using our method.
Figs. 10 and 11 clearly show that both the
aforementioned methods can effectively eliminate
terrain cracks that have an LoD difference of 1, and
the proposed method is also suitable for removing
terrain cracks that have LoD differences of 2, the
complex terrain in the studied region is accurately
reproduced by the processed terrain structures.
4.2.2 Validation of Lighting Continuity
By changing the rules applied for tile splitting, the
tiles that are rendered in a scene will have the same
LoD, which ensures that cracks cannot occur
throughout the entirety of the terrain scene. In this
case, the lighting of the meshes around tile boundaries
is continuous, and this is referred to as the theoretical
reference value. However, under normal tile splitting
rules, the tiles that are rendered in a scene can have
different LoDs, and these are the actual values of the
vertex normals (lighting) after the crack removal
process has been implemented. A comparison was
made between the vertex normals calculated by our
method and the conventional method for the tile
boundaries of a terrain block to inspect the continuity
of the lighting values in each case. The theoretical
values and actual (post-crack removal) values of the
vertex normals are shown in Table 2.
A Method of Terrain Crack Removal Suited for Large Differences in Boundary LoD
67
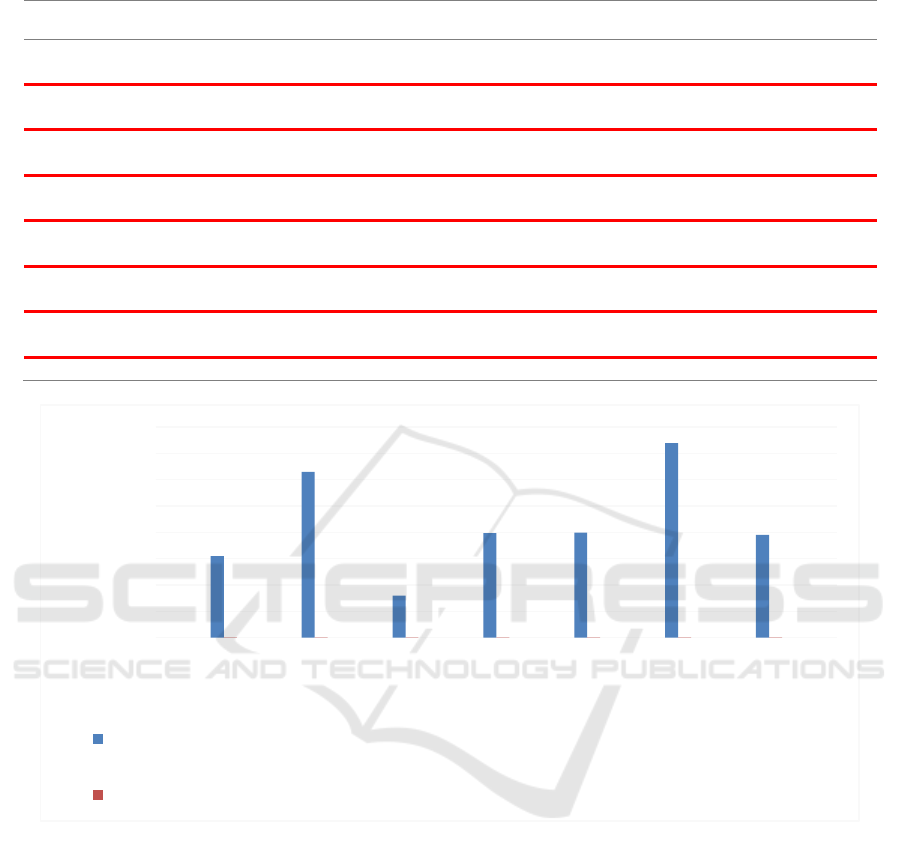
Table 2: Comparison of vertex normal at tile boundaries.
Vertex
number
Theoretical value (X, Y, Z)
Vertex normals of the
conventional method (X, Y, Z)
Vertex normals of our method
(X, Y, Z)
1
(0.630410,0.279561,0.724174)
(0.630410,0.279561,0.724174)
(0.630410,0.279561,0.724174)
2
(0.623360,0.294948,0.724174)
(0.724351,0.134632,0.676158)
(0.623450,0.294758,0.724174)
3
(0.615934,0.310157,0.724174)
(0.615934,0.310157,0.724174)
(0.615934,0.310157,0.724174)
4
(0.608136,0.325179,0.724174)
(0.649363,0.623852,0.434898)
(0.608129,0.325194,0.724174)
5
(0.599973,0.340006,0.724174)
(0.599973,0.340006,0.724174)
(0.599973,0.340006,0.724174)
6
(0.591448,0.354628,0.724174)
(0.639341,0.398756,0.657447)
(0.591449,0.354630,0.724172)
7
(0.582567,0.369035,0.724174)
(0.582567,0.369035,0.724174)
(0.582567,0.369035,0.724174)
8
(0.563758,0.397176,0.724174)
(0.737288,0.423349,0.526481)
(0.563761,0.397176,0.724172)
9
(0.573335,0.383221,0.724174)
(0.573335,0.383221,0.724174)
(0.573335,0.383221,0.724174)
10
(0.543590,0.424360,0.724174)
(0.415249,0.628213,0.657964)
(0.543588,0.424363,0.724174)
11
(0.553841,0.410892,0.724174)
(0.553841,0.410892,0.724174)
(0.553841,0.410892,0.724174)
12
(0.533012,0.437573,0.724174)
(0.743681,0.577819,0.336250)
(0.533012,0.437573,0.724174)
13
(0.522113,0.450522,0.724174)
(0.522113,0.450522,0.724174)
(0.522113,0.450522,0.724174)
14
(0.499378,0.475598,0.724174)
(0.657243,0.261486,0.706864)
(0.499381,0.475595,0.724174)
15
(0.510899,0.463199,0.724174)
(0.510899,0.463199,0.724174)
(0.510899,0.463199,0.724174)
Figure 12: Comparison between the boundary vertex normals calculated by our method and the conventional method.
The red underlines in Table 2 serve to highlight
differences between the theoretical and actual values
of the vertex normals. The X, Y and Z components of
the vertex normals that were calculated by the
conventional method and our method were subtracted
from the reference values, and the absolute values of
these results were then summed to produce the bar
chart shown in Fig. 12. This figure shows that the
vertex normals calculated by our method for all 15
vertices (which are tile boundary vertices) are
essentially identical to the theoretical values. Notably,
only minor differences were observed at the 5th
decimal place and beyond, which are negligible in the
calculation of terrain tile lighting. However, there are
significant differences between the vertex normals
calculated by the conventional method and the
theoretical values, particularly for vertices 2, 4, 6, 8,
10, 12 and 14. These differences will lead to
discontinuities in the lighting of tile boundaries.
4.2.3 Efficiency Validation
The efficiency of our method was validated by setting
the view to roam around the experimental area for 20
minutes. During this time, the total number of tiles,
number of cracks and time consumed by crack
removal in every frame of the terrain rendering
process was randomly sampled at 12 instants. The
results are shown in Table 3.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Sum of absolute vertex normal
differences
Vertex number
Sum of absolute differences between the reference values and those of the conventional
method
Sum of absolute differences between the reference values and those of our method
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
68
Table 3: Crack removal statistics.
Time point (s)
Frames rendered
Total number of
tiles
Total number of
cracked tiles
Proportion of
cracked tiles
Time
consumption of
our method (ms)
Time
consumption of
the conventional
method (ms)
8.13
1025
244
30
12.30%
0.670
7.425
24.70
3458
273
8
2.93%
0.104
8.105
50.35
6643
396
16
4.04%
0.672
9.362
64.13
8721
355
21
5.92%
1.302
7.853
86.03
12474
473
13
2.75%
0.314
9.537
113.73
16149
440
19
4.32%
0.531
9.046
258.79
36231
492
26
5.28%
2.623
9.951
275.1
41264
212
22
10.38%
1.451
6.433
419.21
54498
516
24
4.65%
1.534
9.427
507.17
66439
460
28
6.09%
2.352
8.854
790.74
104378
543
49
9.02%
2.858
9.364
898.84
119546
316
31
9.81%
1.692
7.223
Table 3 shows that the proposed method requires
less computational time than the conventional method
because our method only computes the “parent”
nodes obtained from newly split or merged leaf nodes
during terrain crack removal; hence, only the tiles that
correspond to terrain cracks are processed. During
crack removal with the conventional elevation
adjustment-based method, the entirety of the terrain
quadtree must be traversed; therefore, all the tiles
must be processed when this method is used. This
approach consumes more computational time, and the
average processing time of the conventional method
is approximately 8 times that of our method.
5 CONCLUSIONS AND
DISCUSSION
In this work, we have proposed a terrain crack
removal method that is able to handle large
differences in boundary LoD. This method fully
exploits the features of quadtree structures and the
implicit adjacency relationships of parent and child
nodes. Additionally, terrain crack removal and the
updating of boundary vertex normals occur in real
time. With this method, the elimination of terrain
cracks will no longer be limited by differences in
boundary LoD. The following conclusions were
drawn from the validations and comparative analyses
that were performed using terrain data from a typical
mountainous region in Sichuan Province.
(1) Our method is applicable at boundaries where
the difference in LoD is equal to 1 and complex
terrain areas where the LoD difference between
adjacent tiles is greater than 1.
(2) The continuity of terrain lighting is ensured by
our method through the recalculation and re-
evaluation of boundary vertex normals after the crack
removal process, thereby overcoming the lighting
discontinuities that hinder the use of the conventional
crack removal method.
(3) The efficiency of our method is, on average,
eight times greater than that of the conventional
method because the proposed method does not
traverse the entirety of the terrain quadtree during
crack removal, which saves a substantial quantity of
computational time.
The method that is proposed in this work is
suitable for terrain rendering based on quadtree
structures. However, further research must be
performed to investigate the suitability of the method
for other terrain mesh models, such as triangular
meshes and binary tree models.
ACKNOWLEDGEMENTS
This research was funded by a project supported by
the National Key Research and Development
Program of China (Grant No. 2016YFF0201305) and
National Natural Science Foundation of China (Grant
No. 41871375).
A Method of Terrain Crack Removal Suited for Large Differences in Boundary LoD
69

REFERENCES
Bulatov D, Häufel G, Meidow J, et al. 2014. Context-based
automatic reconstruction and texturing of 3D urban
terrain for quick-response tasks. Isprs Journal of
Photogrammetry & Remote Sensing, 93(7):157-170.
Feng W W, Kim B U, Yu Y, et al. 2010. Feature-preserving
triangular geometry images for level-of-detail
representation of static and skinned meshes. Acm
Transactions on Graphics, 29(2):11-22.
Fu W, Ge Z H, Li W H. 2012. A terrain rendering method
with dynamic error metric for flight simulation. Journal
of Jilin University (Science Edition), 50(6): 1175-1178.
Han L T, Kong Q L, Dai H L, et al. 2012. Optimization of
normal calculation of regular grid terrain based on
OpenGL. Science of Surveying and Mapping, 37(5):17-
19.
Han M, Tang S T, Li Y. 2008. Real-time visualization
algorithm of large-scale terrain. Computer Engineering,
34(13):270-272.
Ke X L, Zeng J. 2005. Dynamic rendering for LOD virtual
terrain using quadtree. Bulletin of Surveying and
Mapping, (6):10-13.
Li Q, Dai S L, Zhao Y J, et al. 2013. A block LOD real-time
rendering algorithm for large scale terrain. Journal of
Computer-Aided Design & Computer Graphics,
25(5):000708-713.
Liu Y, Guan A D, Li J. 2010. A model for massive 3D
terrain simplification based on data block partition and
quad-tree. Acta Geodaetica et Cartographica Sinica,
39(4):410-415.
Nie J L, Liu S, Guo D L, et al. 2013. GPU-accelerated fast
rendering method for multi-resolution geometry image.
Journal of Computer-Aided Design & Computer
Graphics, 25(1):101-109.
P Lindstrom, V Pascucci. 2001. Visualization of Large
Terrains Made Easy. Proceedings of IEEE
Visualization. 363-370.
Wan M, Liang X, Zhang F M. 2015. Improved crack
removing algorithm for quad-tree terrain rendering.
Journal of System Simulation, 27(7):1520-1525.
Wang D C, Wan W G, Tang J Z, et al. 2007. Preprocessing
LOD algorithm for large scale terrain based on
restricted quadtrees. Computer Engineering and
Applications, 43(24):107-109.
WIESEMANN T, SCHIEFE LE J, KUBBAT W. 2005.
Multi-resolution Terrain Depiction on an Embedded
2D/3D Synthetic Vision System. Aerospace Science
and Technology, 9 (6):517-524.
Xu M Z. 2005. Research on Real-Time Rendering for Large
Scale Terrain. Geomatics and Information Science of
Wuhan University, 30(5):392-395.
Yang Y, Wang C, Gao Y, et al. 2014. Large Scale Terrain
Real-Time Rendering on GPU Using Double Layers
Tile Quad Tree and Cuboids Bounding Error Metric.
Open Automation & Control Systems Journal, 2014,
6(1):1378-1388.
Yin Y, Chen G J, Wu W. 2006. An algorithm of avoiding
crack for rendering parting terrain. Journal of
Computer-Aided Design & Computer Graphics,
18(10):1557-1562.
Zhao X S, Fan D Q, Wang J J, et al. 2012. Seamless
expression of the global multi-resolution DEMs based
on degenerate quadtree grids. Acta Geodaetica et
Cartographica Sinica, 41(6):918-925.
Zhao Y B, Shi J Y. 2002. A fast algorithm for large scale
terrain walkthrough. Computer-Aided Design &
Computer Graphics, 14(7):624-628.
Zheng X, Liu W, Lu C L, et al. 2013. Real-time dynamic
storing and rendering of massive terrain with GPU.
Journal of Computer-Aided Design & Computer
Graphics, 25(8):1146-1152.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
70
