
Logical Scenario Derivation by Clustering Dynamic-Length-Segments
Extracted from Real-World-Driving-Data
Jacob Langner
1
, Hannes Grolig
1
, Stefan Otten
1
, Marc Holz
¨
apfel
2
and Eric Sax
1
1
FZI Research Center for Information Technology, 76131 Karlsruhe, Germany
2
Dr. Ing. h.c. F. Porsche AG, 71287 Weissach, Germany
Keywords:
Scenario Extraction, Logical Scenarios, Vehicle Environment, Real-World-Driving-Data.
Abstract:
For the development of Advanced Driver Assistant Systems (ADAS) and Automated Driving Systems (ADS)
a change from test case-based testing towards scenario-based testing can be observed. Based on current
approaches to define scenarios and their inherent problems, we identify the need to extract scenarios including
the static environment from recorded real-world-driving-data. We present an approach, that solves the problem
to extract dynamic-length-segments containing a single scenario. These segments are enriched with a feature
vector with information relevant for the feature under test. By clustering these scenarios a logical scenario
catalog is created, containing all scenarios within the test data. Corner cases are represented as well as common
scenarios. An accumulated total length can be calculated for each logical scenario, giving a brief understanding
about existing test coverage of the scenario.
1 INTRODUCTION AND
RELATED WORK
Original Equipment Manufacturer (OEM), research
institutes and start up companies are currently putting
a lot of effort into realizing autonomous driving.
Many have succeeded in first trials, however, the first
autonomous vehicle is yet to be released. Current
ADAS slowly develop into conditionally automated,
SAE level 3 features, that can take over a driving
task completely in explicitly restricted driving envi-
ronments, e.g. a traffic jam assist on highways up
to 60 km/h. Such features are not yet globally avail-
able, because OEM lack the proof of safety needed for
clearance from the National Motor Vehicle Registra-
tion Authorities. Different standards and regulations
require a separate approval in each country.
According to the ISO26262 (ISO, 2011) safety
goals are set via a risk analysis. To achieve the high-
est possible safety and security on public roads, the
fulfillment of these safety goals has to be proven. The
proof can be brought forward analytically or with the
help of test cases (Henzel et al., 2017). For system-
level testing of ADAS and ADS analytic proof is
not feasible due to the complexity and extent of the
software code and input parameter space. Therefore,
common practice is to use test cases.
In order to achieve sufficient testing, the test cases
need to cover all relevant situations for the Feature
Under Test (FUT). Test cases are usually derived from
the feature requirements manually by domain and test
experts. Each functional requirement is covered by at
least one test case. During system level testing all test
cases are evaluated and a final test result concludes
the fulfillment of each requirement. However, deter-
mining all relevant situations and declaring all feature
requirements, from which the complete set of corre-
sponding test cases can be derived, is not a trivial task.
With the technological advances in environmen-
tal perception, car-to-x communication as well as au-
tomated driving, the complexity of new ADAS and
ADS is steadily increasing. Due to new sensors be-
ing integrated in today’s vehicles, sensor ranges be-
ing increased and background services, e.g. digi-
tal map providers, being utilized, the environmental
information available in the vehicle has grown sig-
nificantly. While these technological advances cer-
tainly enhance the quality of these features and the
possibilities towards more autonomous driving, they
also introduce a manifold of new situations, a vehicle
can encounter, and thereby increase the required test-
ing efforts. The definition of testable, ISO-conform
requirements - and, thereby, the test case-based ap-
proach - is no longer feasible for the next generation
of ADAS and ADS.
458
Langner, J., Grolig, H., Otten, S., Holzäpfel, M. and Sax, E.
Logical Scenario Derivation by Clustering Dynamic-Length-Segments Extracted from Real-World-Driving-Data.
DOI: 10.5220/0007723304580467
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 458-467
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

For ADAS and ADS development it is best prac-
tice to additionally test the feature on public roads
in order to experience as many different situations
as possible. Huge efforts are made to drive as many
kilometers as possible during test campaigns and re-
lease approvals, e.g. 36 million test kilometers for
the release of the Mercedes Benz E-Class (W212) in
2009 (Deppe, 2009) and 12 million test kilometers for
the next generation E-Class (W213) in 2015 (Chris-
tiansen, 2015).
Since there is no checklist of situations to be seen
during testing, the required test kilometers are derived
from statistical calculations. Due to the combination
of different environmental situations and traffic par-
ticipant’s maneuvers, the sheer amount of kilometers
needed to achieve a statistically valid assertion sums
up to a vast number. (Wachenfeld and Winner, 2016)
have calculated a theoretical 6.62 billion test kilome-
ters to prove, that an interstate pilot meets the cur-
rent standards for release approval. The number is de-
rived from fatal accidents drawn from annually crash
statistics in Germany and the total sum of driven high-
way kilometers in Germany per year - assuming that
the absence of accidents is the approval criterion for
highly automated driving. (Amersbach and Winner,
2017).
Simulation enables the selective testing of for ex-
ample critical situations, possibly reducing the re-
quired test kilometers to a fraction of the statistically
calculated 6.62 billion kilometers in case of the inter-
state pilot. Thereby, simulation is an important tool
for OEM to even come close to the required test cov-
erage. However, the validity of the simulation has to
be ensured by providing detailed models of the vehi-
cle, environment, sensors and traffic. Efforts for pro-
viding these models are limiting the theoretical scala-
bility of the simulation approaches.
Figure 1: The 5-level structure for scenario description from
the PEGASUS
1
project.
It has been shown, that for certain ADAS recorded
driving data from real world tests can be utilized to
substitute most of the models needed for the simula-
tion, for an example see (Zofka et al., 2015). Open-
loop features can easily be tested using this data. In
some cases, e.g. predictive features, it even entails
the benefit of the ground truth in form of the recorded
events (Langner et al., 2017). Even closed-loop longi-
tudinal control features have been simulated using the
recorded data from test campaigns (Bach et al., 2017)
(de Gelder and Paardekooper, 2017).
The real-world-driving-data provides a large
amount of realistic driving situations including many
critical ones, which offer better test coverage than
synthetic data and scale better than manually de-
fined test cases. However, the value of the real-
world-driving-data tests is diminished by redundan-
cies. Simply simulating all of the recorded data of-
fers the same control over the tested situations as real
world test drives.
The calculations made by Wachenfeld and Win-
ner are based on a poisson probability distribution of
crashes from German traffic data. The statistical cal-
culations hold true as long as there is no semantic in-
terpretation and selection of the test drives. The con-
tribution towards the proof of safety has to be mea-
sured by the amount of different situations tested, not
by the mere amount of kilometers simulated (Junietz
et al., 2017). An abstract description and the possi-
bility to measure the coverage of these situations is
needed.
Recent research focuses on scenario-based ap-
proaches, where different situations a feature can en-
counter are described on a higher abstraction level. A
scenario contains the static environment, the dynamic
environment including other traffic participants and
their actions as well as the actions of the ego vehi-
cle for a certain period of time (Elrofai et al., 2016).
(Schuldt et al., 2013) have proposed a 4-level scenario
structure for the description of scenarios: the basic
road network, situational modifications, traffic situa-
tion and environment. In the PEGASUS project the
basic road network is split into street level and traf-
fic infrastructure, resulting in a 5-level scenario struc-
ture (see Figure 1). (Bagschik et al., 2017) within the
PEGASUS project have suggested three different ab-
straction layers for scenarios to offer the needed flex-
ibility in each development phase (see Figure 2).
Concrete scenarios are individual instances of log-
ical scenarios, where the complete static and dynamic
environment as well as the state of the ego vehi-
cle are described in detail. They offer little flexibil-
1
https://www.pegasusprojekt.de/files/tmpl/linebreak
PDF-Symposium/04 Scenario-Description.pdf
Logical Scenario Derivation by Clustering Dynamic-Length-Segments Extracted from Real-World-Driving-Data
459

Figure 2: Scenario abstraction layers (Steimle et al., 2018).
ity and their abstraction level is quite similar to test
cases. By abstracting from the explicit signal values
of these concrete scenarios some generalization can
be achieved. Logical scenarios describe a group of
concrete scenarios by parameter ranges for each sig-
nal, whereas functional scenarios textually describe
logical scenarios based on a functional view. This al-
lows for a high-level description of different scenar-
ios early on, which can be specified in later stages of
the development process. Test cases can be derived
from concrete scenarios, which in turn can be derived
from logical scenarios. Therefore, test coverage can
be measured on the logical scenario level.
Still, all possible scenarios a feature can undergo
must be known and explicitly specified to achieve
complete test coverage. There is a lot of ongoing re-
search in the field of scenario definition and standard-
ization. However, a common scenario catalog repre-
senting all scenarios, that can occur while driving in
the real world, is not yet available. Up until now, at-
tempts to create such a common scenario catalog are
limited to certain features and environmental condi-
tions, for example a traffic jam assist with scenarios
that are altogether on highways (P
¨
utz et al., 2016).
Furthermore, it is to be debated, if a universal sce-
nario catalog exists, since relevant scenarios strongly
depend on the FUT, e.g. urban test drives do not mat-
ter for testing of a highway pilot. It can be argued, that
there exists a universal scenario catalog for level 5 au-
tonomous driving and that current level 2 and level 3
features can derive relevant subsets from this catalog.
However, the argument leads nowhere, since this cat-
alog not yet exists.
Instead of explicitly defining all scenarios, they
can also be extracted from recorded real-world-
driving-data (see Figure 2). Several approaches
to extract driving maneuvers of the ego vehicle or
other traffic participants have been published (Gerdes,
2006), (H
¨
ulnhagen et al., 2010). In most cases, ba-
sic maneuvers are explicitly defined and mapped onto
physical parameters and parameter ranges or param-
eter curves. These are then used as a pattern to de-
tect further instances of the same or similar maneu-
ver. (Elrofai et al., 2016) enhance this approach with
data analytics to improve the performance of the de-
tectors. Another approach was published by (Min-
nerup et al., 2015), who use triggers for scenario ex-
traction from real-world-driving-data. However, only
explicitly specified and searchable scenarios like crit-
ical distance to vehicle in front or amount of steering
per second can be found. (Junietz et al., 2017) derive
an abstract criticality metric to identify critical scenar-
ios based on relative metrics between the ego vehicle
and other dynamic objects. Calibration is done with
manually classified scenarios and the metric only de-
rives a pre-selection for manual filtering. There are
no approaches known to the authors, that focus on ex-
tracting scenarios including the static environment of
the vehicle.
All these approaches are motivated by ADAS like
an Adaptive Cruise Control (ACC) or Emergency
Brake Assist (EBA) and are focused on extracting
critical situations for the release approval. Most of
the critical situations for these features occur, when
interacting with other traffic participants. Thereby,
according to (Schuldt et al., 2013) the relevant sce-
narios are also mainly based on the dynamic objects.
But, this does not hold true for predictive features,
whose predictions mainly rely on the sensed environ-
ment as well as upfront information about the static
environment from digital maps. The maneuver ex-
traction approaches, therefore, do not yield a viable
scenario catalog for these features.
Furthermore, testing critical situations alone is not
sufficient either. Especially features taking over lon-
gitudinal or lateral control also have a functional qual-
ity aspect besides the functional safety - the driver or
passenger comfort. Merely avoiding accidents is not
sufficient for the passenger acceptance of the ADS.
Comfort ratings will become increasingly important
with further advances towards autonomous driving -
and comfort has to be evaluated in all situations, not
only the critical ones.
In this paper we present a data-driven approach
to segment the real-world-driving-data into scenar-
ios tailored to the FUT. In contrast to the maneu-
ver extraction approaches, we focus on the static en-
vironment - including the street level, traffic infras-
tructure and environment conditions - and its correct
segmentation. The scenarios are automatically ex-
tracted based on selected signals relevant for the FUT.
The approach combines the description of the static
environment and the dynamic objects and derives a
feature-based scenario catalog from the driving data.
By using a dynamic clustering approach we deter-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
460

mine a flexible amount of logical scenarios, which
contain all found concrete scenarios within the driv-
ing data. The aggregation of discrete signal values
leads to logical scenarios, which offer a more com-
prehensible scenario catalog for system-level testing.
Further interpretation of the logical scenarios can re-
sult in functional scenarios for the FUT.
2 SCENARIO-EXTRACTION
CONCEPT
Real-world-driving-data consists of many driving sit-
uations, which uninterpreted and on their own offer
little information towards the coverage of all possible
situations. However, extracting all these driving situ-
ations as self-contained concrete scenarios and aggre-
gating them to logical scenarios does. The problem
is to find and extract these scenarios within the test
drives.
Our goal is to automatically extract all existing
scenarios relevant for the FUT implicitly from the
data in order to create the feature’s logical scenario
catalog. An example of two logical scenarios is il-
lustrated in Figure 3. The 5-level scenario structure
from the PEGASUS project is used for the scenario
description. Figure 4 reveals the necessary steps: The
first step is to select the relevant signals for the FUT
and pre-process these signals for further usage. The
scenario dividing signals are then used to slice the test
drives into segments with dynamic lengths. Then, a
feature vector describing the static and dynamic envi-
ronment for each segment is extracted from the driv-
ing data. The feature vectors are clustered and each
cluster is interpreted as a logical scenario. The fea-
ture vector is also used as a scenario description.
2.1 Data Selection and Pre-Processing
As already stated - for system level testing - the data
selection has to be done with regard to the FUT. For
ADAS and ADS the amount of possible different sit-
uations, accrued from the combination of the static
and dynamic vehicle environment, is a critical part
for testing. Therefore, signals describing the relevant
vehicle environment should be used. Not all infor-
mation, however, can be derived from a single signal.
Some have to be transformed or gathered from addi-
tional information sources. The temperature, wetness
or traffic density for example can be extracted from
weather or traffic data providers, if they are relevant
for the FUT. More abstract values like the time to col-
lision (TTC) can be calculated as well.
When working with recorded real-world-driving-
data, signal pre-processing is required. The data is
noisy and for statistical uses, some assumptions have
to be made. Error and initial values have to be han-
dled. Especially the GPS signal and the velocity have
to be considered carefully as they are the foundation
for further signal processing. Noise in these signals
propagates throughout the analysis.
Real-world-driving-data is commonly recorded
time-based. This time-dependency leads to a distor-
tion in the representation of the static environment
due to differing velocities during the test drives. In
order to compare the test drives, the signals have to
be converted to a track position-based sampling. The
sampling should be equidistant and consistent cross-
samples and with a reasonable distance between two
data points.
Further pre-processing includes derivation of new
signals or reshaping of existing data.
2.2 Scenario Extraction
For predictive features, which rely heavily on the
sensed static environment, it is necessary to identify
all environmental situations, that can be experienced,
and to validate the correct behavior in these situations.
Contrary to the maneuvers, which have clear start and
end points, the challenge for the static environment is
to detect the change points for seemingly smooth tran-
sitions between different environmental situations.
Common machine learning approaches, that need
to partition real-world-driving-data, use either static
segment lengths or time intervals (Langner et al.,
2018) or up- or downsample the sequences to a de-
fined length (Wang et al., 2018) in order to normal-
ize and partition the test drives, which than can be
processed further. By using a static segment length,
single scenarios within the test drives might be sepa-
rated into two subsequent segments (see Figure 5). A
single segment might also contain more than one sce-
nario. With segments containing more than one sce-
nario and scenarios being divided into multiple seg-
ments, grouping these segments by their feature vec-
tors to generate a scenario catalog is pointless. Up- or
downsampling on the other hand distorts the static en-
vironment and reduces comparability of different se-
quences. Consequently, the test drives need to be cut
along their natural scenario transitions.
The core problem is to find these transition points.
One solution is to use predefined scenarios, specified
by experts, to detect the conditions, that start or end
a scenario. While this approach might work well for
single maneuvers, there is no guarantee, that the ex-
perts thought of every possible scenario. Most cer-
Logical Scenario Derivation by Clustering Dynamic-Length-Segments Extracted from Real-World-Driving-Data
461
Logical Scenario 1
Level 1
– Street Level:
Slope
Street Class
Curviness
Segment
Length
Flat (< 5%)
Village road
Strong curves (> 3 °/m)
Short (10 - 50m)
Level 2
– Traffic Infrastructure:
Speed Limit
Stop
Lights
30km/h; 50 km/h
0 - 1
Level 3
– Temporal Modifications:
-
Level 4
– Movable Objects:
Braking
Maneuvers
Average
Velocity
0 - 3
30 - 40 km/h
Level 5
– Environment Conditions:
Environmental
Context
Country Code
Urban
Germany
Evaluation:
Accumulated
Length 2.649 m
Logical Scenario 2
Level 1
– Street Level:
Slope
Street Class
Curviness
Segment
Length
Flat (<
5%)
Village
road
Straight (< 1
°/m)
Average (50
- 500m)
Level 2
– Traffic Infrastructure:
Speed Limit
Stop
Lights
50 km/h
0
- 5
Level 3
– Temporal Modifications:
-
Level 4
– Movable Objects:
Braking
Maneuvers
Average
Velocity
0
- 7
40
- 60 km/h
Level 5
– Environment Conditions:
Environmental
Context
Country Code
Urban; Extra Urban
Germany
Evaluation:
Accumulated
Length
30.267 m
Figure 3: Exemplary scenario clusters for a PCC feature and their aggregated description.
Data Selection
and Pre-
Processing
Scenario Extraction
Dynamic
Segment
Detection
Feature Vector
Extraction
Scenario
Clustering
Tes t
Drives
Figure 4: Required steps for the scenario extraction ap-
proach.
tainly even, there are corner cases, the experts did not
think of. For the larger parameter space of complete
scenarios, including the static vehicle environment, an
approach is needed, that does not rely on explicit sce-
nario definitions beforehand. By extracting the sce-
narios from the data pool, scenario specification is no
longer necessary. All occurring scenarios are implic-
itly derived, if the data pool is sufficiently large and
diverse.
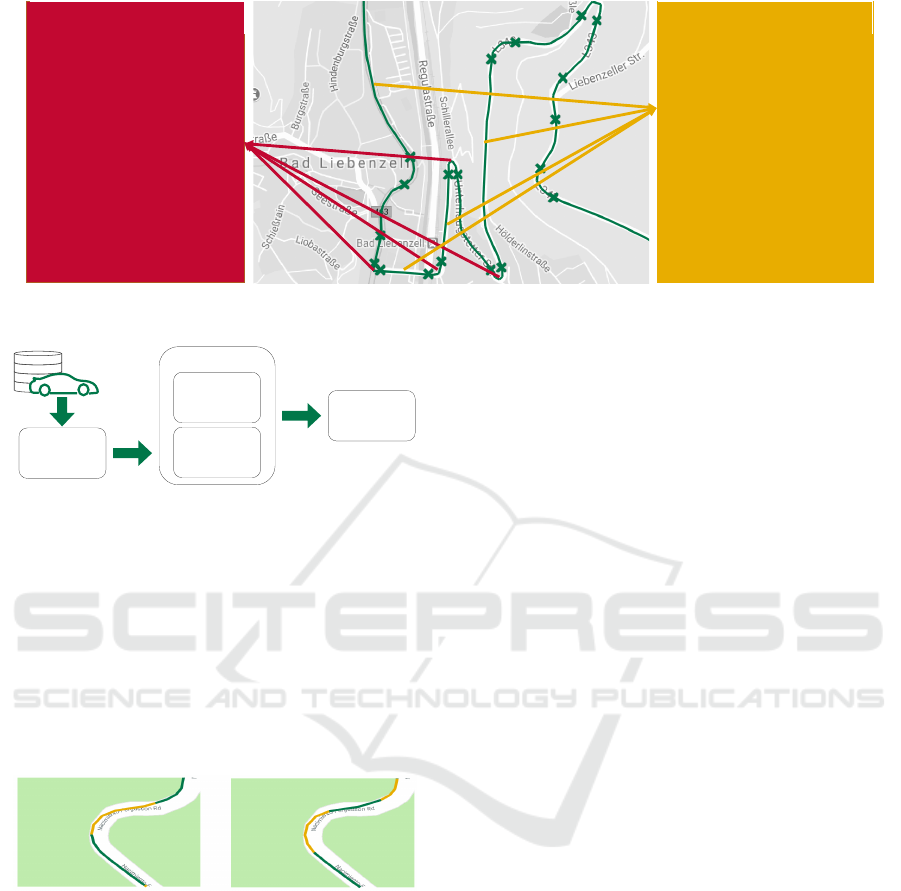
Figure 5: Static segment length (left side) vs. dynamic seg-
ment length (right side) with transition points derived from
the curviness. The curve is separated into two segments
with the static approach whereas the dynamic approach is
able to detect the curve as a coherent segment.
In order to derive the transition points, we separate
the relevant signals in scenario-dividing signals and
scenario attributes. A feature’s input space consists
of many signals. Out of the subset of these signals,
which describe the vehicle environment, some signals
are categorical or ordinal, others are continuous.
Aggregation for categorical and ordinal signals
can oftentimes only be done via counting or percent-
based, which are not ideal for a distinct differenti-
ation. We argue, that - in most cases - these sig-
nals are also scenario dividing and, therefore, changes
in these signals naturally lead to scenario transition
points. For example a change in the street type from
highway to country road marks a significant change in
the environmental situation and thereby separates two
different scenarios. Furthermore, the percent-based
representation, e.g. 64% highway and 36% country
road, is not a useful description for the street type of
a segment.
Continuous signals, e.g. slope or the ego vehicle’s
velocity, can be handled differently. For the velocity
a mean value can be calculated, the slope can be rep-
resented as two values, a positive and negative value,
so that these do not negate each other. In most cases,
these signals describe a segment in the data and do
not clearly divide it. Thus, they are categorized as
scenario attributes. However, if a continuous signal is
crucial for the FUT, it can also be used as a scenario
dividing signal, e.g. the ego vehicle’s velocity for
the traffic jam assist. Via binning or thresholding the
velocity can be transformed into a low dimensional
space, where the boundaries of the velocity bins or
the thresholds operate as the transition points. Then,
a possible scenario segmentation could include dif-
ferentiation of vehicle standstill, stop-and-go traffic,
slow driving and driving close to the feature’s veloc-
ity limit.
In general, it proved practical to use low dimen-
sional and categorical signals as scenario dividing sig-
nals. Continuous and numeric signals on the other
hand, can be utilized as scenario attributes.
2.3 Scenario Clustering
Each extracted feature vector describes a concrete
scenario within the test data. These concrete scenarios
shall be clustered in order to create groups of concrete
scenarios - the logical scenarios. Scenarios within one
cluster shall be similar and scenarios in different clus-
ters shall be distinguishable. The clusters shall be in-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
462

terpretable and shall represent relevant scenarios in
the real world. Since the actual number of different
scenarios is unknown, the number of clusters can not
be explicitly defined. The optimal number of clusters
shall be derived implicitly.
3 EXEMPLARY
IMPLEMENTATION
The proposed approach was implemented for a PCC
feature, which not only considers the front vehicle
like an ACC system does but also incorporates addi-
tional environment information into the velocity pre-
diction (Albrecht and Holz
¨
apfel, 2018). The cor-
responding signals for the environment description
were selected from the real-world-driving-data. The
main focus for the scenario extraction was to create
a scenario catalog for functional system level feature
evaluation. The PCC feature considers curves and
slopes, speed limits, road topology, street class, cross-
ings and the front vehicle for the velocity prediction.
3.1 Data Selection and Pre-Processing
A time-based signal s can be mapped onto the track
position p as s(t) → s(p). Equation 1 displays the
mapping for every measuring point i. ∆t refers to the
sampling interval and v
j
to the measured ego velocity
in point j.
s
i
(p) =
i
∑
j=0
∆t ∗ v
j
(1)
The differing velocity leads to a non-equidistant
position-based sampling of the formerly equidistant
time-based sampling. Besides, signals on the bus sys-
tem and thereby in the recorded test data are sam-
pled with different frequencies up to 50 Hz and more.
This leads to distances of 0.56 m for a velocity of
130 km/h. Such short distances are not required to
detect scenarios, that can be several hundred meters
long, e.g. elongated curves on highways. We decided
to sample the data at every 2 m. Though, this is a de-
sign choice, we are convinced, that a more detailed
resolution is not required for the scenario extraction.
With the mapping of the signals to the track position,
they are now independent from the altering ego vehi-
cle’s velocity during the test drives. The static envi-
ronment is represented consistently.
Since real-world-driving-data is noisy, signal fil-
tering has to be applied in order to accurately describe
the vehicle’s environment. Initial and error values
have to be handled with respect to the actual signal
values. Oftentimes, these values are written as ones
in the bit-encoding of the CAN- or flexray message.
Therefore, when converting the bit-stream into dec-
imal numbers, initial and error values are converted
to large decimal numbers. They can not be left un-
changed or set to zero, since both could have un-
foreseen effects towards the clustering of the signal.
For example, there is a difference between a missing
speed limit being represented as 300 km/h, 0 km/h
or NaN, since cluster algorithms use relative distance
functions. For missing speed limits we chose NaN
and for initial values the first occurring speed limit
was extrapolated. In unlimited areas the speed limit
was set to 210 km/h, which is the maximum sup-
ported velocity for the PCC feature.
3.2 Scenario Extraction
3.2.1 Dynamic Segment Detection
The street type, the speed limit and the classification
of urban, extra urban or highway drive were used as
scenario dividing signals. However, for the PCC there
is, besides these low dimensional signals, one con-
tinuous signal, that has a major influence on the sys-
tem’s behavior: the curvature. Curves limit the max-
imum possible and the maximum tolerated velocity
and hence depict unique scenarios for the longitu-
dinal control, especially in terms of passenger com-
fort. They shall be evaluated separately from other
road segments. By transforming the curvature into
a summable value, the curviness, and then detecting
significant changes in the incline of the accumulated
curviness over the track position, curves can be in-
cluded in the scenario separation. The curviness of-
fers a good abstraction of the overall curvature of a
certain road segment and is calculated as shown in
equation 2
Curviness =
angular change
distance
=
∆γ
∆d
(2)
The angular change can be derived from multiple
sources, e.g. the yaw rate, the steering wheel angle
or wheel angle. However, in our case all these signals
were too noisy to derive a viable curviness. The best
results were achieved by calculating the azimuth from
the GPS points as shown in Figure 6a and 6b. With the
azimuth as the angular change in each GPS point, the
curviness can be calculated by dividing the angular
change ∆γ by ∆d, the sum of half the distance between
p
i-1
→ p
i
and half the distance between p
i
→ p
i+1
.
Since the GPS is noisy as well, some filtering has
to be applied. The calculated curviness can be used
as an indicator for implausible GPS points by calcu-
lating the maximum possible curviness that complies
Logical Scenario Derivation by Clustering Dynamic-Length-Segments Extracted from Real-World-Driving-Data
463

= min{ , 360° | |}
0°/360°
north
90°
east
80°
south
70°
west
(a) Azimuth as the horizontal
angular change of the cardi-
nal direction.
∆
i-1
i+1
i
(b) Calculation of the az-
imuth of each GPS point
based on the two lines p
i-1
→
p
i
and p
i
→ p
i+1
.
Figure 6: Calculation of the curviness based on the azimuth
of each GPS point.
with traffic regulations. In Germany the traffic regula-
tions state, that vehicles must be able to drive through
a turning circle with a radius r of 12.5 m. With the
help of equation 3 this leads to a circumference C of
78.54 m for the minimal possible turning circle. The
curviness of this turning circle can be calculated as
shown in equation 4. This maximal possible curvi-
ness can be used as a threshold for filtering the GPS. A
curviness above this threshold is very likely caused by
a GPS error (see Figure 7 for different detected GPS
errors). Since the velocity, which is used to calculate
the curviness, can be noisy as well, the threshold was
set to Curviness
max
= 9
°
m
.
C = 2 ∗ π ∗ r = 78.54 m (3)
Curviness
max
=
∆γ
∆d
=
360 °
78.54 m
= 4.58
°
m
(4)
Additional filtering of the GPS can be achieved by
comparing the distance between two GPS points and
the driven distance derived from the velocity. Again,
due to possible noise, the thresholds were set to 0.5 <
d
GPS
d
driven
< 2.0.
Figure 7: Filtered GPS errors with thresholds derived from
the curviness and relation of GPS distance to driven dis-
tance.
Finally, the transition points can be derived by
building a vector for each scenario dividing signal:
the street type, the speed limit, the classification of
urban, extra urban or highway drive and the curvi-
ness. As already mentioned, the transition points for
the curviness are derived from significant changes in
the incline of the accumulated curviness over the track
position (see Figure 8). The segments can then be
derived by combining the transition point vectors of
all signals: ρ = ρ
street type
∪ ρ
speed limit
∪ ρ
environment
∪
ρ
curviness
. The combined transition point vector is then
sorted and duplicates are removed. The remaining el-
ements depict start and end positions of the segments
in the test drive. Merge strategies can be applied, if
the segmentation is too compartmentalized due to a
large number of scenario dividing signals.
8.865 8.866 8.867 8.868 8.869 8.87 8.871 8.872 8.873 8.874
longitude
48.8265
48.827
48.8275
48.828
48.8285
48.829
48.8295
48.83
48.8305
latitude
Figure 8: Segmentation via change points of the accumu-
lated curviness.
3.2.2 Feature Vector Extraction
Besides the scenario dividing signals each segment
needs an adequate description of its environmental
situation in order to be clustered correctly. For each
segment a describing feature vector has to be ex-
tracted. For several reasons, time or position-based
features are not ideal. For one, the sequence length
varies, which either leads to a different amount of val-
ues in the feature vectors or to a different sampling.
Both lead to a decrease in comparability of the se-
quences. The second reason is, that clustering time-
series with different sample sizes is not trivial.
A better solution is to derive single values for ev-
ery feature by means of aggregation, minima or max-
ima, mean values, etc. For the showcase, 10 fea-
tures were selected leading to a feature vector with
10 scalar values for each segment in the test data. For
an example see Table 1.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
464

Table 1: Exemplary segments with their corresponding feature vectors (abbrev: Segment Identifier (SID); Speed Limit (SL);
Amount of Occurring Braking Maneuvers (BM); Amount of Occurring Traffic Lights (TL)).
SID Env Street Type Length
seg
SL Curv Slope
pos
Slope
neg
Vel
avg
BM TL
4 rural rural road 54 70 2.85 0 -7.26 28.21 0 0
5 rural rural road 56 70 2.80 0 -7.37 34.46 0 0
8 rural district road 32 100 4.32 7.84 0 28.56 0 0
31 highway highway 1578 140 0.02 0 -1.70 132.20 2 0
32 rural rural road 142 140 1.16 0 -2.28 49.96 0 1
76 rural rural road 78 140 0.56 0 -3.23 40.39 0 1
3.3 Scenario Clustering
The feature vectors can be used to cluster the seg-
ments. Due to the scalar representation common
cluster algorithms can be used. For the showcase,
the K-Medoids with Partitioning around Medoids
(KPAM) algorithms has been implemented (Kaufman
and Rousseeuw, 2009).
K-medoids is a common partitioning cluster algo-
rithm, that is stable against outliers. A set of N data
points is divided into k clusters, so that the sum of
distances between each data point and its correspond-
ing medoid is minimized. The KPAM algorithm is a
deviation of k-medoids with two phases. The set of
data points or observations O is divided into a sub-
set of medoids or selected objects S and a subset of
unselected objects U with |O| = N and U = O \ S.
For every observation o two values are calculated: the
distance D
o
between o and the nearest medoid in S
and the distance E
o
between o and the second nearest
medoid in S.
During the build phase initial medoids are se-
lected. The first medoid is the observation with the
lowest sum of distances to all other observations in
O. Iteratively k − 1 medoids are selected so that the
new partitioning is as distinct as possible.
During the swap phase the iteratively selected
medoids are swapped in order to improve the parti-
tioning. Every object pair in SxU is evaluated. If
the sum of distances for the object in U is lower
than for the object in S, both objects are swapped.
This process is repeated until the partitioning is sta-
ble. For the detailed algorithm we refer to (Kaufman
and Rousseeuw, 2009).
We implemented the KPAM and searched for the
optimal k by iterating 1 ≤ k ≤ 30 with 5 iterations for
each k to avoid local optima. The best solution for
each k was kept. For the k-medoid algorithm the opti-
mal k was evaluated with the elbow-method (Ketchen
and Shook, 1996) - the optimal k = 24 was derived.
4 EVALUATION
As there is no ground truth by means of classified sce-
narios for the test drives or an existing scenario cata-
log for the PCC feature, the evaluation has to be done
empirically. In a first step, the quality of the cluster-
ing has to be evaluated. In a second step the inter-
pretability of the clusters as logical scenarios is val-
idated. Some information about the used data set is
given in Table 2.
Table 2: Overview of the used data set for the PCC show-
case.
Number of test drives 115
Included Countries 10
Overall Length 8432 km
Shortest Test Drive 1.13 km
Longest Test Drive 299.19 km
Average Length 73.09 km
Amount Urban 1271 km
Amount Extra Urban 7161 km
We want to demonstrate the results by showcasing
three clusters of the KPAM algorithm, for the simple
reason that showing all clusters goes beyond the scope
of this article. Figure 9, 10 and 11 show three exem-
plary clusters of the KPAM clustering algorithm with
six randomly chosen concrete scenarios each. Each
cluster in itself is supposed to be similar, with larger
dissimilarities between the clusters.
Figure 9 depicts concrete scenarios from a logical
scenario, that could be described as straight country
road drive with little slope. Figure 10 depicts strong
curves on steep serpentines. Figure 11 displays longer
highway drive scenarios on a straight road with high
speed limits. All three clusters each contain similar
segments. On closer inspection, scenario 4 in Cluster
19 attracts attention. It is the only scenario not on
a highway. However, further investigation has shown,
that this road section was formerly defined as a federal
highway and is still classified as such in the electronic
map, which makes the assignment plausible.
On a feature vector basis the clustering algorithm
Logical Scenario Derivation by Clustering Dynamic-Length-Segments Extracted from Real-World-Driving-Data
465

Figure 9: Six randomly selected concrete scenarios from
cluster 7 depicting straight segments on country roads.
Figure 10: Six randomly selected concrete scenarios from
cluster 14 depicting strong curves and serpentines.
Figure 11: Six randomly selected concrete scenarios from
cluster 19 depicting long highway segments.
has build valid clusters. The question remains, if the
feature vectors represent valid concrete scenarios and
the clusters represent logical scenarios respectively.
Hence, the next step in the evaluation is to exam-
ine the interpretability of the found clusters as logical
scenarios. Each cluster represents a group of simi-
lar feature vectors describing a segment of the driving
data for which the parameter spaces can be derived
from the global maxima and minima for each fea-
ture. In order to represent these clusters in a human-
readable format, a functional scenario for each cluster
is derived:
All concrete scenarios in Cluster 7 can be classi-
fied as country road drives with average velocity on a
straight and flat road segment. All scenarios are extra
urban.
The concrete scenarios in Cluster 14 are on coun-
try roads as well, however, with a steep incline and
strong curves. The curves are segmented accurately.
Cluster 19 represents highway test drives. All sce-
narios are driven at high velocities on highway seg-
ments with no noticeable curve or slope.
For the PCC feature all three logical scenarios de-
pict different use cases with different driving chal-
lenges as well as driving requirements. It can be ar-
gued, that this approach leads to plausible and useful
logical as well as functional scenarios directly derived
from the data.
5 CONCLUSION & FUTURE
WORK
We have shown, that our approach is well suited
to find self-contained environmental scenarios within
real-world-driving-data. The data-driven approach
utilizes the data to extract all occurring concrete sce-
narios, that are gathered during test drives. A cluster
algorithm was used to derive logical scenarios.
The logical scenario catalog can now be used
for scenario-based testing and coverage analysis of
the different existing environmental scenarios. Func-
tional quality can be assessed for different situations,
like different curves, serpentines or corner case clus-
ters. An automated process to identify correlations
between the functional quality and the logical scenar-
ios can be set up.
The number of logical scenarios was derived im-
plicitly for the selected signals and the exemplary data
set. In future work, we will alter the data set by vary-
ing the selected test drives as well as the total length
of the included test drives. The convergency point for
the number of clusters k will be determined. The min-
imal accumulated length of the test drives to ensure
convergence will be derived and we will discuss, if
inferences towards the required test kilometers can be
made.
For ADAS features it is common practice to differ-
entiate between highway, urban and extra urban driv-
ing, because the driving tasks and environmental sit-
uations differ a lot between these three contexts. In
order to get more precise clusters within each context,
we will investigate, whether dividing the data before-
hand into three different groups: highway, urban and
extra urban segments, can improve the clustering re-
sult.
Furthermore, scenarios may be found in other sub-
spaces of the complete feature space. E.g. to distin-
guish a curve scenario from a steep incline or a high-
way scenario, different subspaces need to be looked
at. For the highway scenario the street class is rele-
vant, but slope and curviness may not be, since both
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
466

are usually virtually zero on highways. For steep in-
clines the street class can be neglected but the slope
plays a significant role. As these examples demon-
strate, subspaces may play a vital role in detecting dif-
ferent environmental scenarios and, therefore, these
subspaces will be investigated by utilizing projective
clustering algorithms, e.g. K-Means with Splitting
and Merging (KSM). Experiments with the KSM will
also include clustering with only a few clusters to
investigate the most distinctive features. A low k
should result in a distinction of the most separating
subspaces. These will be investigated further.
REFERENCES
Albrecht, M. and Holz
¨
apfel, M. (2018). Vorausschauend
effizient fahren mit dem elektronischen co-piloten.
ATZextra, 23(5):34–37.
Amersbach, C. and Winner, H. (2017). Functional decom-
position: An approach to reduce the approval effort
for highly automated driving. In 8. Tagung Fahreras-
sistenz, M
¨
unchen.
Bach, J., Otten, S., Holz
¨
apfel, M., and Sax, E. (2017).
Reactive-replay approach for verification and valida-
tion of closed-loop control systems in early develop-
ment. In SAE Technical Paper 2017-01-1671.
Bagschik, G., Menzel, T., Reschka, A., and Maurer, M.
(2017). Szenarien f
¨
ur entwicklung, absicherung und
test von automatisierten fahrzeugen. In 11. Work-
shop Fahrerassistenzsysteme. Hrsg. von Uni-DAS e. V,
pages 125–135.
Christiansen, M. (2015). 5komma6 - mercedes-
benz: In-geheimer-mission-auf-abnahmefahrt-mit-
der-neuen-mercedes-e-klasse-w213.
de Gelder, E. and Paardekooper, J.-P. (2017). Assessment
of automated driving systems using real-life scenarios.
In Intelligent Vehicles Symposium (IV), 2017 IEEE,
pages 589–594. IEEE.
Deppe, P. (2009). Mercedes-benz passion: Mercedes-benz-
praesentiert-in-genf-limousine-und-coupe-der-neuen-
e-klasse.
Elrofai, H., Worm, D., and den Camp, O. O. (2016). Sce-
nario identification for validation of automated driving
functions. In Advanced Microsystems for Automotive
Applications 2016, pages 153–163. Springer.
Gerdes, A. (2006). Automatic maneuver recognition in the
automobile: the fusion of uncertain sensor values us-
ing bayesian models. In Proc. 3rd International Work-
shop on Intelligent Transportation.
Henzel, M., Winner, H., and Lattke, B. (2017). Heraus-
forderungen in der absicherung von fahrerassisten-
zsystemen bei der benutzung maschinell gelernter und
lernender algorithmen. UNI DAS eV (eds.), 11:136–
148.
H
¨
ulnhagen, T., Dengler, I., Tamke, A., Dang, T., and
Breuel, G. (2010). Maneuver recognition using prob-
abilistic finite-state machines and fuzzy logic. In In-
telligent vehicles symposium (IV), 2010 IEEE, pages
65–70. IEEE.
ISO, I. (2011). 26262: Road vehicles-functional safety. In-
ternational Standard ISO/FDIS, 26262.
Junietz, P., Schneider, J., and Winner, H. (2017). Metrik
zur bewertung der kritikalit
¨
at von verkehrssituationen
und-szenarien. In 11. Workshop Fahrerassistenzsys-
teme.
Kaufman, L. and Rousseeuw, P. J. (2009). Finding groups
in data: an introduction to cluster analysis, volume
344. John Wiley & Sons.
Ketchen, D. J. and Shook, C. L. (1996). The application of
cluster analysis in strategic management research: an
analysis and critique. Strategic management journal,
17(6):441–458.
Langner, J., Bach, J., Otten, S., Sax, E., and Holz
¨
apfel, M.
(2017). Framework for using real driving data in au-
tomotive feature development and validation. In 8.
Tagung Fahrerassistenz, M
¨
unchen.
Langner, J., Bach, J., Ries, L., Otten, S., Holz
¨
apfel, M., and
Sax, E. (2018). Estimating the uniqueness of test sce-
narios derived from recorded real-world-driving-data
using autoencoders. In 2018 IEEE Intelligent Vehicles
Symposium (IV), pages 1860–1866. IEEE.
Minnerup, P., Kessler, T., and Knoll, A. (2015). Collect-
ing simulation scenarios by analyzing physical test
drives. In Intelligent Transportation Systems (ITSC),
2015 IEEE 18th International Conference on, pages
2915–2920. IEEE.
P
¨
utz, A., Zlocki, A., and Eckstein, L. (2016). Absicherung
hochautomatisierter fahrfunktionen mithilfe einer
datenbank relevanter szenarien.
Schuldt, F., Saust, F., Lichte, B., Maurer, M., and Scholz, S.
(2013). Effiziente systematische testgenerierung f
¨
ur
fahrerassistenzsysteme in virtuellen umgebungen. Au-
tomatisierungssysteme, Assistenzsysteme und Einge-
bettete Systeme F
¨
ur Transportmittel.
Steimle, M., Bagschik, G., Menzel, T., Wendler, J. T.,
and Maurer, M. (2018). Ein beitrag zur termi-
nologie f
¨
ur den szenarienbasierten testansatz automa-
tisierter fahrfunktionen. AAET-Automatisiertes und
vernetztes Fahren. Hrsg. von ITS Niedersachsen,(zur
Ver
¨
offentlichung angenommen).
Wachenfeld, W. and Winner, H. (2016). The release of au-
tonomous vehicles. In Autonomous Driving, pages
425–449. Springer.
Wang, W., Ramesh, A., and Zhao, D. (2018). Clustering
of driving scenarios using connected vehicle datasets.
arXiv preprint arXiv:1807.08415.
Zofka, M. R., Kuhnt, F., Kohlhaas, R., Rist, C., Schamm,
T., and Z
¨
ollner, J. M. (2015). Data-driven simulation
and parametrization of traffic scenarios for the devel-
opment of advanced driver assistance systems. In In-
formation Fusion (Fusion), 2015 18th International
Conference on, pages 1422–1428. IEEE.
Logical Scenario Derivation by Clustering Dynamic-Length-Segments Extracted from Real-World-Driving-Data
467
