
A LSTM Approach to Detection
of Autonomous Vehicle Hijacking
Naman Singh Negi
1
, Ons Jelassi
1
, Stephan Clemencon
1
and Sebastian Fischmeister
2
1
LTCI, Telecom ParisTech, Paris, France
2
Dept. of Elec. and Computer Eng., University of Waterloo, Waterloo, Canada
Keywords:
Anomaly, Anomaly Detection, Recurrent Neural Networks, Long Short-term Memory.
Abstract:
In the recent decades, automotive research has been focused on creating a driverless future. Autonomous ve-
hicles are expected to take over tasks which are dull, dirty and dangerous for humans (3Ds of robotization).
However, augmented autonomy increases reliance on the robustness of the system. Autonomous vehicle sys-
tems are heavily focused on data acquisition in order to perceive the driving environment accurately. In the
future, a typical autonomous vehicle data ecosystem will include data from internal sensors, infrastructure,
communication with nearby vehicles, and other sources. Physical faults, malicious attacks or a misbehaving
vehicle can result in the incorrect perception of the environment, which can in turn lead to task failure or
accidents. Anomaly detection is hence expected to play a critical role improving the security and efficiency of
autonomous and connected vehicles. Anomaly detection can be defined as a way of identifying unusual or un-
expected events and/or measurements. In this paper, we focus on the specific case of malicious attack/hijacking
of the system which results in unpredictable evolution of the autonomous vehicle. We use a Long Short-Term
Memory (LSTM) network for anomaly/fault detection. It is, first, trained on non-abnormal data to understand
the system’s baseline performance and behaviour, monitored through three vehicle control parameters namely
velocity, acceleration and jerk. Then, the model is used to predict over a number of future time steps and
an alarm is raised as soon as the observed behaviour of the autonomous car significantly deviates from the
prediction. The relevance of this approach is supported by numerical experiments based on data produced by
an autonomous car simulator, capable of generating attacks on the system.
1 INTRODUCTION
The past few decades have seen the automotive indus-
try invest significant amount of resources in the de-
velopment and deployment of autonomous and con-
nected vehicles. Autonomous vehicles are capable of
sensing their environment and navigating under dif-
ferent driving conditions without any human interven-
tion. Connected vehicles are capable of using vari-
ous communication technologies to connect and com-
municate with a network i.e. with the driver, other
cars on the road (vehicle-to-vehicle [V2V]), road-
side infrastructure (vehicle-to-infrastructure [V2I]),
and the "Cloud" [V2C]. With the advancement in sen-
sor technology, information exchange networks, wire-
less technology such as Bluetooth, Wi-Fi and 4G and
the ease of processing data, autonomous systems are
becoming exceedingly capable and efficient at per-
forming different driving tasks. It is expected that au-
tomation in vehicles will help improve vehicle safety,
decrease traffic congestion and commute times, in-
crease fuel efficiency and provide in-Car infotain-
ment. ’Autonomous Vehicle Sales Forecast 2018’ by
IHS Markit suggests Autonomous vehicle sales to sur-
pass "33 million annually in 2040. It is predicted that
there will be a quarter of a billion connected vehicles
on the road by 2020 (Velosa et al., 2014). Hence, with
time, autonomous and connected vehicles will find in-
creasing use in real-world applications.
As the whole autonomous environment is data
driven, data acquisition and data reliability become
important aspects for smooth and efficient working of
the system. In the future a typical autonomous vehicle
data ecosystem will include data from internal sen-
sors, infrastructure, communication with nearby ve-
hicles, and other sources. A data based environment
is a delicate structure and is vulnerable to error and
hacking, which makes the autonomous and connected
vehicles highly susceptible to malicious attacks and
information tampering, along with system failures.
Negi, N., Jelassi, O., Clemencon, S. and Fischmeister, S.
A LSTM Approach to Detection of Autonomous Vehicle Hijacking.
DOI: 10.5220/0007726004750482
In Proceedings of the 5th Inter national Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 475-482
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
475

(Koscher et al., 2010) demonstrated that hacking into
the car’s internal network can give the attacker ac-
cess to wide range of vehicle control functions like
disabling the brakes, manipulating the speed, stop-
ping the engine, etc. In 2016, Troy Hunt managed
to hack into a Nissan Leaf using an unsecured API
in the HVAC component shipped by an OEM ven-
dor. (Petit and Shladover, 2015) researched potential
threats and cyber- attacks on automation and coop-
eration automated vehicles. Other studies have also
shown that various vehicle systems can be hacked
to unable a remote takeover of the vehicle (Check-
oway et al., 2011). Chrysler recalled 1.4 million ve-
hicles after (Miller and Valasek, 2015) showed how a
Jeep Cherokee was remotely hacked and stopped on a
highway.
Moreover increase in the connectivity of the vehi-
cles further tends to increase its vulnerability to ma-
licious attacks. Problems in one car can affect other
connected cars and networks in the connected envi-
ronment. This means that not only device-level secu-
rity must be addressed, but also data security during
transmission and storage. Protecting connected vehi-
cles hence becomes a challenging task due to com-
plexity, connectivity (large attack surface) and legacy
(unsafe and outdated technologies).
Hence autonomous systems must be comple-
mented by anomaly-detection systems, in particular
to answer the question : Can the data received be
trusted? Anomaly detection is a technique used to
identify unusual patterns that do not conform to ex-
pected behavior. For such a system to be effective, it
has to be computationally light, and detect faults with
high degree of both precision and recall. A too-high
rate of false positives will lead operators ignoring the
system whereas a too-low rate will make it ineffec-
tive. In addition, the faults must be detected quickly
after their occurrence, so that they can be dealt with
before they become catastrophic.
1.1 Related Work
Anomaly detection for real-time data has been re-
searched in the past especially in the field of robotics
and automation. (Goel et al., 2000), (Sundvall and
Jensfelt, 2006), (Cork and Walker, 2007) use Kalman
Filter (KF) as a tool for detecting anomalies by com-
paring predicted values with the observed values. KF
used alone leads to a large number of false positives
and therefore is combined with other computational
techniques to provide robust detection. (Goel et al.,
2000) combines KF with neural networks whereas
(Cork and Walker, 2007) uses a non linear model as-
sociated to KF. (Chakravarty, 2013), (Hong, 2014)
use rule-based techniques to extract and identify ab-
normal driving behaviors. Supervised learning-based
classification techniques (see (Chen, 2015)) have also
been used to identify anomalous patterns in data.
(Pokrajac, 2007) uses K-Nearest Neighbor (KNN) to
identify local outliers in data streams. (Brotherton
and Mackey, 2001) uses the Mahalanobis distance to
differentiate between nominal and abnormal behavior
of aircraft signals. (Laurikkala et al., 2000), and (Lin
et al., 2010) use the Mahalanobis Distance for detect-
ing anomalies in multivariate data. Other techniques
such as threshold-based detection and Bayesian as-
sumptions of prior distributions(Rajasegarar et al.,
2008), local messaging based distributed detection
(Chen, 2015), (Branch et al., 2013), support vector
machines (SVM) based detection (Zhang et al., 2013),
have been studied in past research.
In this paper, we develop a LSTM approach to on-
line hijacking detection for autonomous vehicles in
two steps. It is assumed that, in the absence of an at-
tack on the system, the behavior of a self-driving car is
smooth and highly predictable at a short term horizon.
Using this assumption, the first step consists of train-
ing the LSTM network to understand the system’s
baseline performance and behaviour. The trained
model is then used to predict the vehicle parameters
over a number of future time steps and an alarm is
raised as soon as the observed behaviour of the au-
tonomous car significantly deviates from the predic-
tion. We show that such a LSTM model learnt using
only the normal sequences can be used for detecting
anomalies in various vehicle inputs time-series data
namely: speed, acceleration, and jerk. The dataset
used in this study was generated from experiments
performed on a treadmill based autonomous car sim-
ulator at University of Waterloo, Canada(Simulator,
2018)
The rest of this paper is organized as follows: Sec-
tion 2 presents the LSTM approach promoted and
related works. Section 3 describes the Treadmill
Demonstrator we used to generate the dataset and the
parameters of the LSTM model. In section 4, the per-
formance of our approach is investigated and some
concluding remarks are collected in section 5.
2 LSTM BASED ANOMALY
DETECTION
This section presents the rationale behind our ap-
proach. We start by briefly describing LSTM net-
work models. Then, we describe how LSTM is
used to model the dynamic behaviour of the system
(autonomous vehicle in our case) in order to gather
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
476
knowledge about the baseline performance (model
training stage). The model is then used to detect
changes in the system as well as outliers using root
mean square error metrics (prediction stage).
2.1 Long Short-Term Memory (LSTM)
Networks
The persistence of information in our brain helps us
in understanding any situation based on the memory
of the past events. The human brain does not erase
everything each time a new situation occurs and start
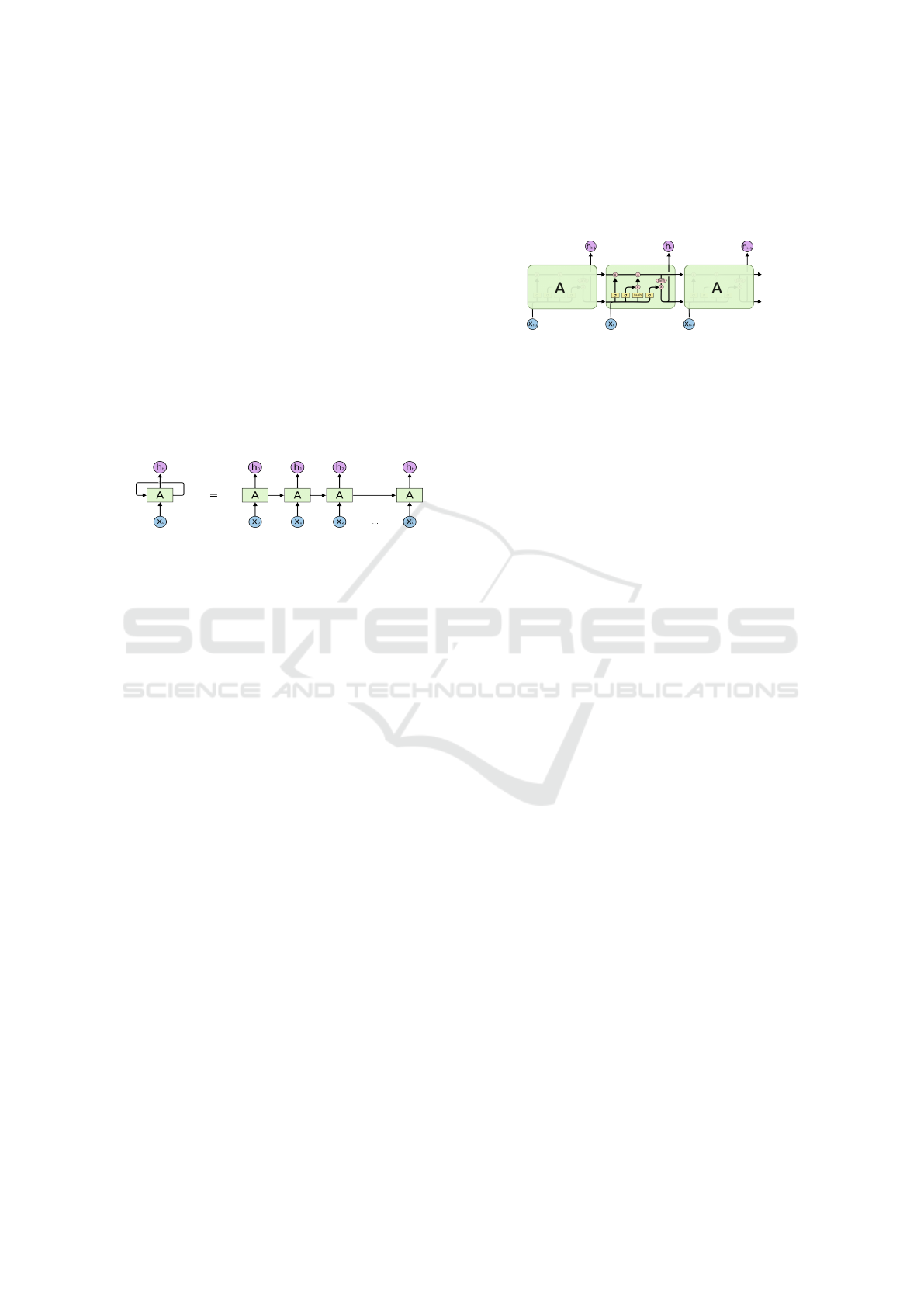
from scratch. Recurrent neural networks use the same
logic and in essence are neural networks with loops
in them which allows information to persist. A loop
allows information to be passed from one step of the
network to the next.
Figure 1: Recurrent neural networks(RNN).
Thus, RNNs use past information to understand
the present situation. One major drawback of RNN is
how far in the past should we search. Sometimes, the
recent past can provide enough information to execute
the present task, but there are also times when we have
to look further back in the memory to extract the re-
quired and relevant information. It’s entirely possible
that for certain applications or in certain scenarios this
gap between the relevant information and the point
where it is needed becomes very large. Performance
of RNNs deteriorates as this gap grows. Deep neural
networks are already used in testing autonomous cars
like in (Tian et al., 2018).
Long Short Term Memory networks are a special
kind of RNN, capable of learning long-term depen-
dencies. They were introduced by Hochreiter and
Schmidhuber in (Hochreiter and Schmidhuber, 1997)
and are explicitly designed to avoid the long-term de-
pendency problem. LSTMs also have this chain like
structure, but the repeating module has a different
structure. Unlike RNNs that have a single neural net-
work layer, LSTM includes four layers interacting in
a special way. The LSTM has the ability to remove
old information or add new information at any point,
which is regulated by structures called gates. Gates
are composed of a sigmoid neural net layer and a
pointwise multiplication operation and are a way to
exchange informations. A LSTM has three of these
gates, to protect and control the information.
• Forget Gate: to decide what information we’re go-
ing to throw away from the block.
• Input Gate: to decide what new information we’re
going to update/store in the block
• Output Gate: to decide what to output based on
the input and on the memory of the block.
Figure 2: LSTM.
3 DATA ACQUISITION
3.1 Experimental Setup
The autonomous car simulator at the University of
Waterloo, Canada was used to collect data under dif-
ferent driving scenarios. This demonstrator is a lab-
oratory platform used for research and validation of
results on real-time safety-critical systems in the con-
text of assisted and autonomous driving algorithms.
The platform consists of a treadmill which mimics
the movement of a vehicle on a straight road. The
position control places the vehicle on the treadmill
without it drifting away. The car model is capable
of emulating various driving scenarios like free fun,
slalom, platooning and collision avoidance. For the
present study, the following data was collected for dif-
ferent driving scenarios with and without injection of
attacks/anomalies
• Position Data (Infrared Sensor)
• Vehicle Orientation (Infrared Sensor)
• Vehicle Commands (Steer/Throttle)
• Anomaly Information
The position data acquired from the different tests
was used to calculate the
• Velocity: Rate of change of position
• Acceleration: Rate of change of Velocity
• Jerk : Rate of change of Acceleration
3.1.1 Dataset 1: Non Anomalous Data
The purpose of this dataset was to gather informa-
tion about the normal (non-anomalous) driving be-
havior. This dataset is used to train the LSTM pre-
dictive model. The data acquired was from a free run
driving scenario which represents the vehicle moving
at constant velocity in a straight line. Under this sce-
nario, control inputs (which represent driver inputs)
A LSTM Approach to Detection of Autonomous Vehicle Hijacking
477

were given to change the position of the vehicle in the
longitudinal and lateral direction at different intervals
(Figure 3).
Figure 3: Non Anomalous Training Data.
3.1.2 Dataset 2: Anomalous Data
The purpose of this dataset was to gather information
about the anomalous driving behavior which repre-
sents possible attack to the system. This dataset was
used to test the prediction efficiency of the trained
LSTM model. The injected anomaly is called com-
pound injection and it simulates a scenario where a
malicious attacker manages to gain access to the car’s
transmission control using a wirelessl network, by
causing the throttle value to be multiplied by the spec-
ified positive factor. The dataset consists of a mix of
normal driving inputs along with injected anomalies
Figure 4: Anomalous Testing Data.
3.2 Performance Metrics
To calculate the performance of the LSTM anomaly
detection algorithm, a set of thresholds were used
based on the range of values of the prediction error.
These thresholds were used to classify data into nor-
mal and abnormal behaviour. The performance met-
rics used in this paper are
• True Positive Rate (TPR) or Sensitivity or De-
tection Rate measures the proportion of correctly
classified actual (true) positives (in this case the
anomalies)
T PR =
T P
T P + FN
(1)
• Specificity (or true negative rate) measures the
proportion of correctly classified actual (true)
negatives.
Speci f icity =
T N
T N + FP
(2)
• False Positive Rate (FPR) or False Alarm Rate
measures the proportion of wrongly classified ac-
tual (true) negatives
FPR =
FP
FP + T N
(3)
• False Discovery Rate (FDR) measures the pro-
portion of positive test results that are incorrectly
identified
FDR =
FP
FP + T P
(4)
• F
β
score is the weighted mean of precision and
recall.
F
β
=
(1 + β
2
) ∗ P ∗ R
β
2
∗ P + R
(5)
Area Under the Curve (AUC) calculated for the
Sensitivity- Specificity curve and Decision Rate-False
Alarm Rate was also used to compare the perfor-
mance.
3.3 Evaluating LSTM Algorithm
In (Malhotra et al., 2015), LSTM is used to model
time series data and proved to be efficient for detect-
ing anomalies. In this paper, we use a similar ap-
proach for on-line detection of malicious attacks on
autonomous vehicles. In the training stage, a LSTM
model adapts its weights to mimic the training data.
In our case, we train the model using normal data as
we would like the model to learn and understand a
normal driving behaviour. This model is next used
for prediction of future values. A significant devia-
tion from the predicted behavior tends to indicate the
occurrence of an attack on the system. The intuition
behind this approach is that the LSTM model is only
shown normal instances during training and hence it
learns to reconstruct the normal behavior of the sys-
tem. When the trained model is given an anomalous
dataset, it will not be able to reconstruct the signal
well, and hence would lead to higher prediction er-
rors compared to the prediction errors for the normal
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
478

data. When evaluating the performance of the mod-
elling algorithm, the following two parameters were
optimized:
• Training Window Size: Number of previous time
steps used as input to predict the next step
• Predict Ahead: Number of future time steps that
are predicted
The range of values used for the two tuning pa-
rameters can be seen in Table 1.
Table 1: Model Tuning Parameters.
Window Size 3, 6, 9, 12, 15, 18
Predict Ahead 1, 2, 3, 4, 5, 6, 7, 8, 9
4 RESULTS AND dISCUSSIONS
This section discusses results of LSTM modelling on
the control parameters which have different levels of
difficulty as far as anomaly detection is concerned.
Figure 5: Tuning Parameters.
Training window size represents the size of the in-
put sequence used to predict the future values (Figure
5). For example window size of 9 means that 9 previ-
ous data points were used as input to model and pre-
dict one or more future values. Similarly prediction
window size represents the number of future values
that were predicted using the trained model. Hence
a prediction window size of 3 means that 3 at any
time ’t’,the model was used to predict values at time
t+1,t+2 and t+3.
4.1 Model Parameters
LSTM Model trained on the Acceleration data was
used to optimize the parameters discussed in Section
3.3. Root mean square error (RMSE) of the predicted
data values was used to compare the performance.
4.1.1 Training Window Size
Figure 6 below shows the prediction result for differ-
ent window sizes. Predict ahead value of 1 was used
for all training window sizes. Hence for a window
size of ’n’, input sequence data from t=0 to t=n was
used to model and predict the value for t=n+1. Simi-
larly input sequence data from t=1 to t=n+1 was used
to model and predict the value for t=n+2 s and so on.
Figure 6: Window Size Tuning.
Figure 7 below shows the RSME error for different
window sizes. It can be seen that least error and hence
maximum performance was found using window size
9 i.e. 9 previous values used for prediction.
Figure 7: RSME for different Window Sizes.
4.1.2 Predict Ahead
Figure 8 below shows the prediction result for differ-
ent predict ahead values. Training window size of 9
was used for all predictions.
Figure 8: Predict Ahead Parameter Tuning.
For every time step the values were predicted ’n’
times i.e. a data value at ’t+n’ was predicted ’n’ times.
To find a consolidated prediction value a weighted
A LSTM Approach to Detection of Autonomous Vehicle Hijacking
479

mean of all the predicted values was calculated every
time step
X
t+n
=
∑
t+n
t
w
t
∗ X
t
∑
t+n
t
w
t
(6)
Figure 9 below shows the RSME error for different
predict ahead values. It can be seen that error and
hence performance deteriorates as the model tries to
predict further ahead.
Figure 9: RSME for Predict Ahead Parameter Tuning.
4.1.3 Final LSTM Model
3 Uni-variate and 3 Multi-variate LSTM models are
used in this paper. The Multi-Variate models uses all
three time series (Velocity, Acceleration, and Jerk) to-
gether as input to predict the three parameters individ-
ually. A single layer LSTM model was used in order
to keep the model simple and computationally light.
Table 2 shows summary of the different models.
Table 2: LSTM Models Summary.
Model 1 Univariate Velocity Velocity
Model 2 Univariate Acceleration Acceleration
Model 3 Univariate Jerk Jerk
Model 4 Multivariate Velocity
Acceleration
Jerk
Velocity
Model 5 Multivariate Velocity
Acceleration
Jerk
Acceleration
Model 6 Multivariate Velocity
Acceleration
Jerk
Jerk
4.1.4 Training and Prediction
Window size of 9 was used to train the model for 500
epochs. Each input sequence was an array of size
(Number of Parameters X Window Size). Hence in
this case array of size (1 X 9) for univariate models
and (3 X 9) for multivariate models. The length of
the entire dataset for training was 1000 seconds (at
30Hz sampling rate). Average time to train the model
was 0.03 s/sequence/epoch for univariate models and
0.09 s/sequence/epoch for multivariate models. The
trained model was used to predict values one time step
ahead. The length of the testing dataset was 2220 sec-
onds (30 Hz sampling rate). The average prediction
time was 0.15 milliseconds/datapoint.
4.2 Model Performance
The efficiency of the different models is calculated by
comparing the testing set and training set errors, and it
was found that a certain threshold value can be used to
detect attacks. The latter may vary with the efficiency
of the prediction model but the trend remains the same
with prediction error being higher in the event of an
anomalous driving manoeuvre.
Figure 10: Model Performance: Prediction vs True values.
Figure 10 below shows the RMSE between the
values predicted by the LSTM model and the true
values captured by the vehicle sensors (Jerk Values).
As can be seen from the figure RMSE is smaller for
the non anomalous data (green) which shows that
the model performed well in replicating normal be-
haviour. On the other hand the model was not very ef-
ficient in reproducing the anomalous behaviour which
is evident from higher values of RMSE for anomalous
testing data.
Figure 11 shows the Sensitivity versus Specificity
curve for different models and Table 3 shows the AUC
value for the respective curves.
Based on the AUC values it can be seen that LSTM
velocity models (Univariate and Multivariate) are the
least efficient and the models based on Jerk shows the
best performance.
AUC
Model 1 0.42
Model 2 0.75
Model 3 0.97
Model 4 0.56
Model 5 0.87
Model 6 0.97
F
β
score was used to find the optimum value of
threshold for the prediction error to detect anomalies.
Figure 12 shows the value of F
β
score for different
threshold values.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
480

Figure 11: Model Comparison.
Figure 12: ROC Curve.
In the results shown in Table 4 and Table 5, F
β
= 0.8
and 0.9 is used to find the threshold for different pa-
rameters. Using these threshold values the different
performance metrics were calculated.
It can be seen that Univariate Velocity Model (Model
1) shows the worst performance (low TPR and high
FPR). The Multivariate Velocity Model (Model 4)
shows lowest FPR but also has the lowest TPR
whereas on the other hand Multivariate Jerk model
(Model 6) has the highest TPR but also shows high
FPR.
5 CONCLUSION
In this paper, we have proposed an anomaly detection
model for hijacking detection based on Long Short-
Term Memory Recurrent Neural Network. We have
provided empirical evidence that LSTM networks are
relevant to predict the normal behaviour of a self-
Table 3: F
β
= 0.8
Model TPR FPR FDR
Model 1 0.43 0.58 0.30
Model 2 0.74 0.26 0.19
Model 3 0.98 0.5 0.24
Model 4 0.53 0.21 0.2
Model 5 0.88 0.33 0.19
Model 6 1.0 0.5 0.24
Table 4: F
β
= 0.9
Model TPR FPR FDR
Model 1 0.42 0.5 0.27
Model 2 0.5 0.08 0.07
Model 3 0.93 0.04 0.03
Model 4 0.5 0.0 0.0
Model 5 0.67 0.08 0.07
Model 6 0.97 0.13 0.08
driving vehicle at a short term horizon, and can be
next used to detect possible attacks on the system.
We showed that even a basic LSTM Model approach
yielded promising results on three different datasets.
The results show that the multivariate models show
better performance than their counterpart univariate
models in terms of TPR, FPR and FDR values. The
LSTM models based on the Jerk parameter showed
the best performance based on the AUC values for the
Sensitivity-Specificity curve and also showed highest
True Positive Rate. But the model also showed high
False Positive rate. A possible explanation for this re-
sult is insufficient tuning of the model leading to rel-
atively high prediction errors even for the normal be-
havior in the testing stage. Further tuning the model
by using more data for training, increasing the com-
plexity of the model and/or running the model over
higher number of epochs might help reduce the False
Positive rate.
The multivariate LSTM model for Velocity showed
the best performance in terms of False Positive rate
but performed poorly in terms of True Positive rate
and AUC values for Sensitivity-Specificity curve.
This may be explained by the high number of anoma-
lies with a very small displacement in the longitudi-
nal or lateral direction resulting in velocity values not
very different from the normal behavior. Thus this
model can be useful for anomalies with displacement
similar or greater than normal behaviour. In future
work, we will focus on:
1. LSTM model parameter tuning to improve the ro-
bustness
2. Improve the anomaly detection efficiency of the
model
3. Model extension to be able to discriminate be-
tween different types of anomalies
A LSTM Approach to Detection of Autonomous Vehicle Hijacking
481

REFERENCES
Branch, J. W., Giannella, C., Szymanski, B., Wolff, R., and
Kargupta, H. (2013). In-network outlier detection in
wireless sensor networks. Knowledge and information
systems, vol. 34, no. 1.
Brotherton, T. and Mackey, R. (2001). Anomaly detector
fusion processing for advanced military aircraft. pages
3125–3137. IEEE Proceedings on Aerospace Confer-
ence.
Chakravarty, T., G. A. B. C. C. A. (2013). Mo-bi drive
score a system for mobile sensor based driving analy-
sis: A risk assessment model for improving one’s driv-
ing. pages 338–344. 7th International Conference on
Sensing Technology (ICST),IEEE.
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., Savage, S., Koscher, K., Czeskis, A.,
Roesner, F., and Kohno, T. (2011). Comprehensive
experimental analyses of automotive attack surfaces.
San Francisco, USA. USENIX Security Symposium.
Chen, Z., Y. J. Z. Y. C. Y. L. M. . (2015). Abnormal driv-
ing behaviors detection and identification using smart-
phone sensors. pages 524–532. 12th Annual IEEE In-
ternational Conference on Sensing, Communication,
and Networking (SECON), IEEE.
Cork, L. and Walker, R. (2007). Sensor fault detection for
uavs using a nonlinear dynamic model and the imm-
ukf algorithm. pages 230–235. IDC.
Goel, P., Dedeoglu, G., Roumeliotis, S. I., and Sukhatme,
G. S. (2000). Fault-detection and identification in
a mobile robot using multiple model estimation and
neural network. ICRA-00.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Hong, J. H., M. B. D. A. K. (2014). A smartphone-based
sensing platform to model aggressive driving behav-
iors. pages 4047–4056. 32nd Annual ACM confer-
ence on Human Factors in Computing Systems.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno, T.,
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
and Shacham, H. (2010). Experimental security anal-
ysis of a modern auto- mobile. in security and privacy
(sp). page 447–462, Stamford, CT, USA. IEEE Sym-
posium.
Laurikkala, J., Juhola, M., and Kentala, E. (2000). Infor-
mal identification of outliers in medical data. Fifth
International Workshop on Intelligent Data Analysis
in Medicine and Pharmacology.
Lin, R., Khalastchi, E., and Kaminka, G. A. (2010). Detect-
ing anomalies in unmanned vehicles using the maha-
lanobis distance. pages 3038–3044. ICRA.
Malhotra, P., Vig, L., Shroff, G., and Agarwal, P. (2015).
Long short term memory networks for anomaly de-
tection in time series. 23rd Euro- pean Symposium on
Artificial Neural Networks.
Miller, C. and Valasek, C. (2015). Remote exploitation of
an unaltered passenger vehicle.
Petit, J. and Shladover, S. E. (2015). Potential cyberattacks
on automated vehicles. IEEE Transactions on Intelli-
gent Transportation Systems, 16(2):546–556.
Pokrajac, D. (2007). Incremental local outlier detection for
data streams. IEEE Symposium on Computational In-
telligence and Data Mining.
Rajasegarar, S., Leckie, C., and Palaniswami, M. (2008).
Anomaly detection in wireless sensor networks. IEEE
Wireless Communications, vol. 15, no. 4.
Simulator, A. C. (2018). University of waterloo.
Sundvall, P. and Jensfelt, P. (2006). Fault detection for
mobile robots using redundant positioning systems.
ICRA-06.
Tian, Y., Pei, K., Jana, S., and Ray, B. (2018). Deeptest:
Automated testing of deep-neural-network-driven au-
tonomous cars. In Proceedings of the 40th Inter-
national Conference on Software Engineering, ICSE
’18, pages 303–314, New York, NY, USA. ACM.
Velosa, A., Hines, J., LeHong, H., and Perkins, E. (2014).
Predicts 2015: The Internet of Things. Gartner, Stam-
ford, CT, USA.
Zhang, Y., Meratnia, N., and Havinga, P. J. (2013). Dis-
tributed online outlier detection in wireless sensor net-
works using ellipsoidal support vector machine. Ad
hoc networks, vol. 11, no. 3.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
482
