
Parking Occupancy Detection using Thermal Camera
Vijay Paidi and Hasan Fleyeh
Dalarna University, School of Technology and Business Studies, Borlänge, Sweden
Keywords: Convolutional Neural Network, Detectors, Thermal Camera.
Abstract: Parking a vehicle is a daunting task during peak hours. The search for a parking space leads to congestion and
increased air pollution. Information of a vacant parking space would facilitate to reduce congestion and
subsequent air pollution. This paper aims to identify parking occupancy in an open parking lot which consists
of free parking spaces using a thermal camera. A thermal camera is capable of detecting vehicles in any
weather and light conditions based on emitted heat and it can also be installed in public places with less
restrictions. However, a thermal camera is expensive compared to a colour camera. A thermal camera can
detect vehicles based on the emitted heat without any illumination. Vehicles appear bright or dark based on
heat emitted by the vehicles. In order to identify vehicles, pre-trained vehicle detection algorithms, Histogram
of Oriented Gradient detectors, Faster Regional Convolutional Neural Network (FRCNN) and modified Faster
RCNN deep learning networks were implemented in this paper. The detection rates of the detectors reduced
with diminishing of heat in the vehicles. Modified Faster RCNN deep learning network produced better
detection results compared to other detectors. However, the detection rates can further be improved with larger
and diverse training dataset.
1 INTRODUCTION
Parking can be a daunting task during peak hours due
to availability of limited number of parking spaces
compared to the number of vehicles. It can lead to
congestion and increased air pollution. Parking
management is an integral component for city
planning administrators and this is one of the research
themes in a smart city development. It can take up to
14 minutes to find a parking space according to
previous studies (Shoup, 2006, Polycarpou et al.,
2013). Parking has been an important research area as
it enables accessibility to commuters and is capable
of enhancing business opportunities (Paidi et al.,
2018). Parking problem is applicable to both major
and minor cities due to higher demand and limited
resources, though there can be a difference in demand
between different places. Lack of parking spaces at a
retail store can lead to loss of business opportunities.
Therefore, stores spend higher expenditure to acquire
sufficient number of parking spaces which cover
large areas of scarce land resources. Due to space
restrictions, in urban areas, new parking areas are
being built in multi storey buildings or basements.
Another way to address parking problem is to use
public transport which might not be a convenient
option for everyone.
Parking guidance systems were developed to
reduce congestion, fuel costs and air pollution. There
are several web and mobile smart parking
applications available. Smart parking applications are
available for closed parking lots while there are no
applications available for open parking lots (Paidi et
al., 2018). Demand of parking spaces in an open
parking lot is higher compared to a closed parking lot.
Therefore, this paper aims to detect parking
occupancy in an open parking lot. An open parking
lot is also subjected to different environment
conditions such as; snow, rain, darkness and sunny.
An investment made in parking guidance system or
smart parking application for open parking lots
cannot be retained directly as the parking spaces are
available freely. There are several tools used to
identify parking occupancy such as; infrared and
ultrasonic sensors, magnetometers, vehicle ad hoc
networks (VANET) and microwave radars (Hassoune
et al., 2016, Idris et al., 2009). However, sensors,
VANET, microwave radars and magnetometers need
higher expenditure in installation and maintenance
activities. Therefore, usage of camera is a suitable
technology to identify parking occupancy which is
capable of covering large number of parking spaces
with a single camera. However, the number of
parking spaces covered by a camera is also dependent
Paidi, V. and Fleyeh, H.
Parking Occupancy Detection using Thermal Camera.
DOI: 10.5220/0007726804830490
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 483-490
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
483

on the height and angle of the positioned camera. In
this paper, a thermal camera is used for obtain parking
occupancy detection in an open parking lot. An open
parking lot is subjected to various weather conditions
and a thermal camera is capable of detecting objects
during such conditions. A thermal camera is
expensive compared to a colour camera but it has less
privacy restrictions compared to the use of normal
colour camera and it is suitable for any environment
and light conditions. There is not much previous
literature available on the use of thermal cameras to
identify parking occupancy. Therefore, this paper
aims to address this research gap with this paper. Pre-
trained detectors, trained detectors using aggregate
channel features, histogram of oriented gradient and
deep learning network are implemented for parking
occupancy detection. The remaining sections of the
paper is organized in the following way. Section 2
discusses relevant literature while Section 3 discusses
about the dataset and set of detectors used in this
paper. Section 4 presents the results obtained in this
paper along with analysis. Section 5 discusses pros
and cons of using a thermal camera for parking
occupancy detection. Finally the paper is ended with
conclusion in Section 6.
2 LITERATURE REVIEW
Since, parking occupancy detection is performed
using a camera, relevant algorithms or detectors are
discussed in this section. The use of a thermal camera
for identifying parking occupancy is not discussed in
previous literature. However, when it comes to colour
camera, there are several studies available in the
literature. Edge detectors such as Canny and Sobel
can be used to identify vehicles (Bao et al., 2005)
(Maini and Aggarwal, 2009). Edge detectors perform
efficiently when the vehicles can be recognized.
However, when using thermal cameras, due to loss of
heat in the vehicle over a period of time, vehicles can
become dark and can be challenging to recognize or
detect. In such scenarios edge detectors might not be
a suitable option for vehicle detection. Histograms of
Oriented Gradient (HOG) descriptors and Viola Jones
are efficient human or pedestrian detectors (Dalal and
Triggs, 2005) which can also be used for vehicle
detection. HOG detector trains using positive and
negative images using a linear Support Vector
Machine (SVM) classifier (Mao et al., 2010). HOG
detector is invariant to geometric and photometric
transformations (Xu et al., 2016) and is therefore, one
of the detector tested in this paper.
Neural networks is an evolving data processing
system used for classification purposes. It is inspired
by the human brain nervous system. In one study,
neural networks are used for efficient recognition of
license plates (Villegas et al., 2009). Convolutional
neural networks is a deep learning method for
classification of images which can be used for object
detection and it can also be adapted for identifying
parking occupancy (Amato et al., 2017). Deep
learning is capable of handling complex object
detections and is therefore one of the method tested
in this paper. Increased performance normally
requires higher computational costs and in order to
maintain accuracy with lower computational costs a
binary sliding window detector also called aggregated
channel feature (ACF) detector was developed
(Dollár et al., 2014, Liu and Mattyus, 2015). An
image is computed to multiple channels and then sum
every block of pixels to generate lower resolution
channels. A multi scale sliding window is employed
and boosting is performed to identify object in ACF.
Kalman filter is used to identify and classify night
time traffic surveillance (Robert, 2009). Headlight
and visible vehicle features are used to detect
vehicles. Similarly in another study, (Fleyeh and
Mohammed, 2012) vehicles during night time were
detected using blob properties which were classified
by an SVM classifier and Kalman filters were
invoked to track the detected vehicles. In another
study, infrared thermal camera was used to study
traffic flow by using Viola jones detector. The tires
and windshield of the vehicles were used to identify
the vehicles (Iwasaki et al., 2013). Based on the
chosen features, positive and negative images were
used to train the detector. However, since the vehicles
are moving on the road, heat can be captured by the
windshield or by the tires which might not be
applicable to this paper since the vehicles are
stationary in a parking lot. In a similar study, an
unmanned aerial vehicle with help of a thermal
camera is deployed for detection of people and cars
(Gaszczak et al., 2011). Detection of people and cars
are performed using multiple cascaded Haar
classifiers. Haar uses a set of weak classifiers to form
a strong classifier. However, the position and angle of
the vehicle affected the detection using this classifier.
3 METHOD
The data for parking occupancy detection for this
paper is captured using a thermal camera. Thermal
camera is normally deployed for surveillance
purposes where objects are identified using heat
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
484

Figure 1: Images of parking space from thermal camera.
signatures (Robert, 2009). The thermal camera
installed in this paper is equipped with 19mm focal
length objective on top of a two storey building. Since
the camera was not placed at sufficient height the
entire parking lot was not covered. Therefore, due to
height and focal length limitations of the camera, only
first four rows of the parking lot were selected to
identify parking occupancy. The data was collected in
different weather conditions such as snow, rain, dark
and bright conditions. In Scandinavian countries or
other similar countries, daylight is shorter during
winter and longer during summer. Snow can be seen
for three to four months during winter. A colour
camera can face issues with low light levels and snow
conditions which are common in Scandinavian
countries. Based on the privacy policy guidelines in
Sweden, it is restricted to use video surveillance in
open public areas where individuals can be
recognized or identified (Datainspektionen, 2018).
Therefore, the use of thermal camera had helped to
avoid these restrictions where no individuals can be
identified or recognized. There are multiple parking
spaces in the parking lot selected for this study.
However, the first four rows of the parking lot is
identified as the region of interest which is marked by
the green rectangle as shown in Figure 2. The vehicles
outside region of interest are small and majorly
occluded which was the reason for exclusion. The
thermal camera records videos based on motion
detection which lead to collection of several small
interval videos. The videos were collected in bright,
dark and snowy weather conditions. Videos from
various weather conditions were selected and one
frame from each video was collected. In this way 60
images were collected from 60 videos.
Figure 2: Area of parking spaces.
In the morning, vehicles are warm and can be
easily identified during winter or sunny conditions.
However, when the heat in the vehicles reduce over a
period of time, they appear to be dark and are hard to
be recognized as shown in Figures 1.3 and 1.4. The
thermal camera uses pseudo colours to display data as
shown in Figures 1 and 2. Therefore, the data is
converted to grey scale for further processing. Since
there were no pre-labelled dataset available, occupied
and vacant parking spaces were labelled manually as
shown in Figure 3. Occupied spaces were labelled as
cars and unoccupied spaces were labelled as empty.
Diversity between the images was maintained to
improve feature detection. Due to limited number of
training images, all the images were used for training.
Testing was performed with a different set of images
which are not part of the training dataset. In order to
check the performance and accuracy of the detector,
images of different environmental conditions were
tested. There are free online databases such as PKLot
providing hundreds of parking lot images which can
be used to test performance of various algorithms (De
Almeida et al., 2015).
(1.1) Sunny in winter morning
(1.2) Dark snowy winter morning
(1.3) Dark winter evening
(1.4) Dark snowy winter afternoon
Parking Occupancy Detection using Thermal Camera
485

Table 1: Detectors description.
S.No
Detector
Description
1
Pre-trained Aggregate Channel Features
(ACF) detector
A trained vehicle detector based on aggregate channel
features. The detector is trained with unoccluded images of
vehicles (ACFdetector, 2018, Liu and Mattyus, 2015).
2
Pre-trained Faster
RegionalConvolutionalNeuralNetwork
(Faster RCNN) detector
A pre-trained deep learning convolutional neural
network trained using unoccluded images of vehicles. It
consists of modified version of CIFAR-10 architecture.
(FasterRCNN, 2018)
3
Trained ACF detector
A detector using ACF is trained using the dataset of 60
images captured by thermal camera. A new detector is
trained since, pre-trained detector is trained using colour
and unoccluded images. (ACFdetector, 2018)
4
Cascade detector
A cascade detector is trained using the dataset of 60
images. Features are trained using HOG which are efficient
in detecting objects compared to Haar or Binary Patterns.
(detector, 2018, Dalal and Triggs, 2005)
6
Faster RCNN
A Faster RCNN is trained using the thermal camera
dataset of 60 images. Since a pre-trained network is trained
using unoccluded images of vehicles, a new detector is
trained. The Faster RCNN is created using 11 layers. (Fan
et al., 2016). This detector is capable of producing better
results with less number of training images.
7
Faster RCNN from Resnet50
A Faster RCNN is created using a 50 layer deep
learning network (resnet50, 2018). Resnet is a trained deep
learning network which can classify 1000 objects. The
network is re-trained with the training dataset.
However, the images were collected by a colour
camera and the use of such images are not appropriate
for this paper. Therefore, only the images from the
thermal camera were used in training the detectors.
Figure 3: Labelled image.
4 RESULTS AND ANALYSIS
This section discusses and analyses the results
obtained from implementing the detectors.
4.1 Pre-trained ACF Detector
The pre-trained ACF detector was not able to detect
many vehicles as shown in Figure 4. Only one vehicle
was detected with a low score using the pre-trained
ACF detector. The vehicle in the middle of the
parking lot was only detected due to clear visibility.
Figure 4: Pre-trained ACF detector.
4.2 Pre-trained Faster RCNN Detector
The pre-trained Faster RCNN detector performed
better compared to ACF detector as shown in Figure
5. Approximately 33% of vehicles were detected
using this detector. Additional training needs to be
done to improve detection rate.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
486
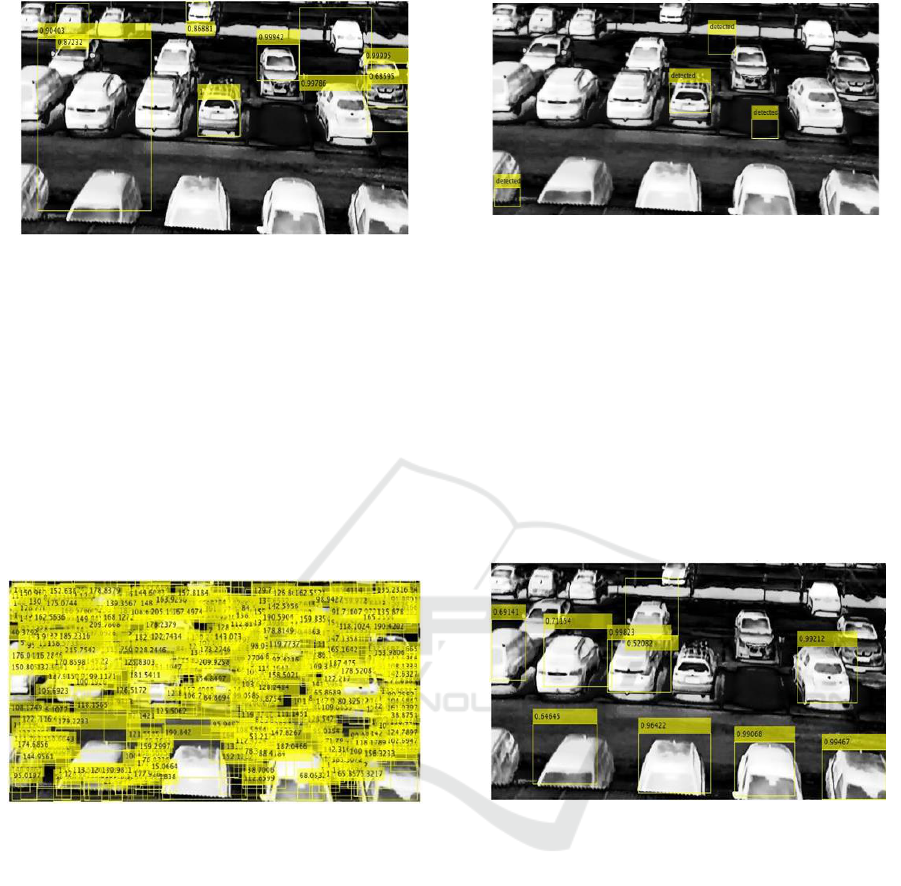
Figure 5: Pre-trained Faster RCNN.
4.3 Trained ACF Detector
The ACF detector was trained using the images
available in the dataset. 60 images with two labels i.e.
cars and empty were used to train the ACF detector.
The ACF classifier was trained with 702 positive
images, 1404 negative images and 2048 weak
learners. However, due to limited number of training
images and noise, the detector was not able to detect
vehicles accurately. Large number of small areas with
high scores were detected which can be due to noise
as shown in Figure 6.
Figure 6:Trained ACF detector.
4.4 HOG based Cascade Detector
The cascade detector was trained with 671 positive
images and 1342 negative images. People, trees, etc.
were used as negative images for the training. Only
vehicle bounding boxes were selected for training.
However, as shown in the Figure 7, only one vehicle
is detected successfully while three vehicles were
partially detected. Therefore, detection rate of
vehicles with HOG detector is approximately 16%.
The position and angle of the parked vehicle is also
affecting the detection rate.
Figure 7: HOG based cascade detector.
4.5 Trained Faster RCNN Detector
The Faster RCNN deep learning network is trained
with the same training dataset. The network consists
of 11 layers and as shown in Figure 8, successful
detection rate is approximately 50%. Compared to the
previous algorithms, Faster RCNN achieved better
detection results. However, the network is newly
created and the available dataset is considered to be
small to achieve higher detection results. In order to
achieve better detection results, higher number of
images needs to be used for training.
Figure 8: Faster RCNN.
4.6 Modified Faster RCNN Detector
Since, large number of labelled images are not
available for training purposes, a Faster RCNN
network is updated from pre-trained deep learning
network. The pre-trained deep learning network is
Resnet-50 which consists of 50 layers and is trained
with thousands of images. Since the network is
already trained, it is experienced in extracting
features from images. Therefore, the last three layers
were modified and trained the network with available
dataset images. The results can be found in the three
images of Figure 9.
Parking Occupancy Detection using Thermal Camera
487

Figure 9(a): Detection results from sunny winter morning.
This detector performed better than the previous
detectors tested in this paper as shown in Figure 9(a).
The detection rate of vehicles achieved
approximately 88% while detection rate of empty
spaces is approximately 66%. Since the results were
considerable better, the deep learning network was
also tested on other environment conditions such as
winter afternoon and winter evening. In winter
afternoon, the cars became a bit cold and were not as
clear as in the morning. The detection rate of vehicles
is approximately 62% while detection rate of empty
spaces is approximately 33% as shown in Figure 9(b).
Figure 9(b): Detection results in winter afternoon.
In the evening, few vehicles were colder and appeared
darker leading to difficult detection results as shown
in Figure 9(c). The detection results of vehicles in
Figure 9(c) is approximately 42% while there no
successful detection of empty spaces. The modified
Faster RCNN performed better than other algorithms
tested in this paper. Pre-trained detectors did not
perform well as they were trained with unoccluded
colour images of vehicles. The ACF detector
aggregates blocks of pixels from various channels
such as; gradient histogram, gradient magnitude and
RGB channels.
Figure 9(c): Detection results from dark winter evening.
The images captured from the thermal camera are
based on the heat emitted from the object and does
not represent visual aspects of the image. Therefore,
aggregation of channel features method on pseudo
colour images or videos is not suitable for object
detection based on the Figure 4 and 6. The modified
Faster RCNN deep learning network performed better
in sunny or bright conditions where vehicles were
detectable. However, with diminishing of heat in
vehicles, the detection rate of vehicles and empty
spaces was reduced. The detection rate of vehicles in
bright conditions is nearly 88% while it is 42% in
dark conditions as shown in Figure 9(a) and 9(c). The
vehicles were largely occluded which also impacted
the detection rate. When the heat in the vehicles is
diminished, windshield, tires and headlights also
appear to be dark as shown in Figure 9(c). The
vehicles were detected in any environment if there is
heat in the vehicles as can be shown in Figure 9.
5 DISCUSSION
The training dataset used for the algorithms in this
paper consists of only 60 labelled images. Higher
number of training images can lead to better detection
results. Darker vehicles with less heat are also
detected using the modified Faster RCNN algorithm
as shown in Figure 9. However, only the first two
rows which consists of unoccluded vehicles were
detected successfully. The occluded vehicles in the
third and fourth row were not detected in dark winter
evening conditions where vehicles were colder and
darker. The pre-trained networks did not perform
efficiently on thermal images since they were trained
on colour images. The results clearly show that deep
learning network is capable of good detection results
in any environment if the vehicles are unoccluded.
The detection rate can be improved with occluded
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
488

vehicles as well with higher number of training
images. Since the number of training images in this
paper is considered to be low, the detection results of
occluded vehicles and empty spaces was low. If the
position of the camera is placed at an increased height
or placed on top of the parking lot, unoccluded
images of vehicles can be obtained which can lead to
better detection rate in any environment or lighting
conditions.
A thermal camera can be used with less
restrictions compared to colour visual camera.
Privacy rules do not enable the free use of camera at
public places. The main drawback and advantage of
using a thermal camera is that the vehicles can be
recognized based on emitted heat. A vehicle can be
recognized during anytime or any environmental
conditions if there is sufficient amount of heat emitted
by the vehicle. This is one of the advantage of using
a thermal camera instead of a colour visual camera. If
a vehicle is stationary for a period of time, the heat in
the vehicle diminishes gradually and the vehicles
cannot be recognized easily which is disadvantage in
using thermal camera. The heat in the vehicle is
preserved in warm conditions while it diminishes
faster in cold conditions. Therefore, vehicles can be
recognized for a longer period of time in warmer
climate environments. It would be a challenge to
detect a vehicle without any heat in colder
environments based on the results. However, the
results might vary with larger training dataset. A
thermal camera does not work as a normal camera,
therefore, any algorithm or deep learning network
should be trained with the images or videos obtained
from the thermal camera which is also evident based
on the results obtained from the pre-trained detectors.
Training a deep learning network with many layers
take considerable amount of time. It took
approximately 8 hours to train the modified
FasterRCNN deep learning network with a single
CPU. The training time can be reduced with the use
of a graphical processing unit. There is also difference
between successful detection rates of vehicles and
empty spaces. In snowy conditions, vehicles which
are warm are successfully detected while few of the
empty spaces which are occluded are not detected
even in bright conditions. The lines of empty spaces
were not visible during snowy or dark conditions
making the detection of empty spaces challenging.
The empty spaces in third and fourth rows are
occluded and could not be detected in winter evening
or dark conditions.
6 CONCLUSION
The paper aims to identify parking occupancy
using a thermal camera. The first four rows of the
parking lot were considered to identify parking
occupancy. Pre-trained detectors, ACF detector,
HOG based cascade detector, Faster RCNN deep
network and modified Faster RCNN deep learning
network algorithms were used to identify parking
occupancy. The modified Faster RCNN deep learning
network performed better compared to other
detectors. Even with limited number of training
images, modified deep learning network achieved
88% successful detection of vehicles while it
achieved 66% of detection rate of empty spaces. The
future work can be focused on improving the
detection rate and to acquire real time parking
occupancy detection using thermal camera. This
paper addresses the first step in identifying parking
occupancy information and the next step would be to
train the detector with additional training images and
get the positional information of the vacant parking
space which can be fed to a parking guidance system.
REFERENCES
ACFDETECTOR. 2018. vehicleDetectorACF [Online].
Mathworks. Available: https://www.mathworks.com/
help/driving/ref/vehicledetectoracf.html [Accessed 25
Dec 2018].
Amato, G., Carrara, F., Falchi, F., Gennaro, C., Meghini, C.
& Vairo, C. 2017. Deep learning for decentralized
parking lot occupancy detection. Expert Systems with
Applications, 72, 327-334.
Bao, P., Zhang, L. & Wu, X. 2005. Canny edge detection
enhancement by scale multiplication. IEEE
transactions on pattern analysis and machine
intelligence, 27, 1485-1490.
Dalal, N. & Triggs, B. Histograms of oriented gradients for
human detection. Computer Vision and Pattern
Recognition, 2005. CVPR 2005. IEEE Computer
Society Conference on, 2005. IEEE, 886-893.
DATAINSPEKTIONEN. 2018. The purposes and scope of
the General Data Protection Regulation [Online].
Available: https://www.datainspektionen.se/other-
lang/in-english/the-general-data-protection-regulation-
gdpr/the-purposes-and-scope-of-the-general-data-
protection-regulation/ [Accessed].
De Almeida, P. R., Oliveira, L. S., Britto Jr, A. S., Silva Jr,
E. J. & Koerich, A. L. 2015. PKLot–A robust dataset
for parking lot classification. Expert Systems with
Applications, 42, 4937-4949.
Detector, C. 2018. Cascade detector [Online]. Available:
https://www.mathworks.com/help/vision/ug/train-a-
cascade-object-detector.html [Accessed].
Parking Occupancy Detection using Thermal Camera
489

Dollár, P., Appel, R., Belongie, S. & Perona, P. 2014. Fast
feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 36, 1532-1545.
Fan, Q., Brown, L. & Smith, J. A closer look at Faster R-
CNN for vehicle detection. Intelligent Vehicles
Symposium (IV), 2016 IEEE, 2016. IEEE, 124-129.
FASTERRCNN. 2018. vehicleDetectorFasterRCNN
[Online]. Mathworks. Available: https://
www.mathworks.com/help/driving/ref/vehicledetector
fasterrcnn.html [Accessed 20 Dec 2018].
Fleyeh, H. & Mohammed, I. 2012. Night Time Vehicle
Detection. Journal of Intelligent Systems, 21, 143-165.
Gaszczak, A., Breckon, T. P. & Han, J. Real-time people
and vehicle detection from UAV imagery. Intelligent
Robots and Computer Vision XXVIII: Algorithms and
Techniques, 2011. International Society for Optics and
Photonics, 78780B.
Hassoune, K., Dachry, W., Moutaouakkil, F. & Medromi,
H. Smart parking systems: A survey. Intelligent
Systems: Theories and Applications (SITA), 2016 11th
International Conference on. IEEE, 1-6.
Idris, M., Leng, Y., Tamil, E., Noor, N. & Razak, Z. 2009.
Саг park system: a review of smart parking system and
its technology. Information Technology Journal, 8,
101-113.
Iwasaki, Y., Misumi, M. & Nakamiya, T. 2013. Robust
vehicle detection under various environmental
conditions using an infrared thermal camera and its
application to road traffic flow monitoring. Sensors, 13,
7756-7773.
Liu, K. & Mattyus, G. 2015. Fast Multiclass Vehicle
Detection on Aerial Images. IEEE Geosci. Remote
Sensing Lett., 12, 1938-1942.
Maini, R. & Aggarwal, H. 2009. Study and comparison of
various image edge detection techniques. International
journal of image processing (IJIP), 3, 1-11.
Mao, L., Xie, M., Huang, Y. & Zhang, Y. Preceding vehicle
detection using Histograms of Oriented Gradients.
Communications, Circuits and Systems (ICCCAS),
2010 International Conference on. IEEE, 354-358.
Paidi, V., Fleyeh, H., Håkansson, J. & Nyberg, R. G. 2018.
Smart parking sensors, technologies and applications
for open parking lots: a review. IET Intelligent
Transport Systems, 12, 735-741.
Polycarpou, E., Lambrinos, L. & Protopapadakis, E. Smart
parking solutions for urban areas. World of Wireless,
Mobile and Multimedia Networks (WoWMoM), 2013
IEEE 14th International Symposium and Workshops on
a, 2013. IEEE, 1-6.
RESNET50. 2018. resnet50 [Online]. Available: https://
www.mathworks.com/help/deeplearning/ref/resnet50.
html?searchHighlight=resnet50&s_tid=doc_srchtitle
[Accessed].
Robert, K. Night-time traffic surveillance: A robust
framework for multi-vehicle detection, classification
and tracking. Advanced Video and Signal Based
Surveillance, 2009. AVSS'09. Sixth IEEE International
Conference on, 2009. IEEE, 1-6.
Shoup, D. C. 2006. Cruising for parking. Transport Policy,
13, 479-486.
Villegas, O. O. V., Balderrama, D. G., Domínguez, H. &
Sánchez, V. G. C. 2009. License plate recognition using
a novel fuzzy multilayer neural network. International
journal of computers, 3, 31-40.
Xu, Y., Yu, G., Wang, Y., Wu, X. & Ma, Y. 2016. A hybrid
vehicle detection method based on viola-jones and
HOG+ SVM from UAV images. Sensors, 16, 1325.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
490
