
Formal Approach to Dynamic SoS Design
Hela Kadri
1,2
, Simon Collart-Dutilleul
1
, Philippe Bon
1
and Samir Ben Ahmed
2
1
IFSTTAR/ESTAS, Universit
´
e Lille Nord de France, 20 rue Elis
´
ee Reclus, France
2
Universit
´
e de Tunis El Manar, Campus Universitaire Farhat Hached, Tunisia
Keywords:
System of Systems, Petri Nets, Discrete-event Systems, Operating Modes, Control Design, Reconfiguration,
Supervisory Control Theory.
Abstract:
This paper deals with the problem of System-of-Systems (SoS) modeling whose structure change due to the
dynamics of its constituent systems as they are developed in different operating modes. Designed by using
multi-model approach, each operating mode represents a process functioning of its system, depending on the
resources to activate and requirements to enforce. Studied as a Discrete-Event System (DES), we propose a
hierarchical framework for designing suitable switching control for dynamic SoS using the High Level Petri
Nets (HLPN). Following a bottom up approach, we model each component first in a separate sheet and then
the operating modes. Next, systems are designed by integrating a switching mechanism to commit to different
operating modes when switching events occur. Finally, a mechanism for managing systems dependencies
inside the SoS is proposed. Algorithms are provided to generate the different layers of HLPN permitting easy
implementation of our framework and a flexible manufacturing SoS is used to illustrate our approach.
1 INTRODUCTION
In recent years, complex systems have seen an in-
creasing interest; they became large and work to-
gether to achieve common goals. In this context, the
concept of a System-of-Systems (SoS) has been pro-
posed. It offers a high-level viewpoint encompass-
ing the interactions between the constituent systems
(Jamshidi, 2008). The SoS concept has applied in
many fields including military (Huynh and Osmund-
son, 2006), robotics (Jamshidi, 2008), transportation
(Caballini et al., 2012) and crisis management (Kadri
et al., 2018). As the malfunction of a single system
can have some serious consequences on the perfor-
mance of the whole SoS, it’s important that the de-
sign of SoSs takes into account the reliability and ro-
bustness requirements of its operation safety. Start-
ing from this necessity, the objective of this paper is
the design in a formal way of SoSs with maintain-
ing an acceptable SoS operation despite failures oc-
curring. To reduce complexity, we adopt a hierar-
chical bottom-up design approach using High Level
Petri Nets (HLPN). First, we model all components
of an SoS in different models. Next and to avoid
to handle the whole process and the whole specifi-
cation, we adopt the multi-model approach to design,
for each system of the SoS, the behavior of its op-
erating modes in separate models. In this step, we
handle the problem of common components between
operating modes, especially that of states. Then, we
present a framework devoted to operating mode man-
agement under specific control based on supervisory
control theory (Ramadge and Wonham, 1989). In this
theory, systems are allowed to switch from one oper-
ating mode to another one, when exceptional events
occur. Such events may be a failures, failed resource
recoveries, maintenance, etc. Finally, we introduce,
in an upper layer, a framework for modeling inter-
actions and dependencies between systems in order
to maintain acceptable SoS operation despite failures
occurring. In the following sections, we present the
developed work in its different stages and aspects.
2 PRELIMINARY
2.1 SoS Concept
The (ISO/IEC/IEEE 15288 Annex G (ISO, 2015) de-
fines an SoS as ”[...] a set of systems [brought to-
gether] for a task that none of the systems can ac-
complish on its own. Each constituent system keeps
its own management, goals, and resources while co-
ordinating within the SoS and adapting to meet SoS
goals.” However, several definitions, which are not
Kadri, H., Collart-Dutilleul, S., Bon, P. and Ben Ahmed, S.
Formal Approach to Dynamic SoS Design.
DOI: 10.5220/0007730903770384
In Proceedings of the 14th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2019), pages 377-384
ISBN: 978-989-758-375-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
377

universally accepted, appeared before. For exam-
ple, (Checkland, 1999) defines SoS as ”two or more
systems that are separately defined but operate to-
gether to perform a common goal”. The Depart-
ment of Defense American (DoD, 2008) consider an
SoS as ”a set or arrangement of systems that results
when independent and useful systems are integrated
into a larger system that delivers unique capabilities.”
(Maier, 1998) proposes five traits, known as Maier’s
criteria, for distinguishing SoSs: Operational Inde-
pendence of Elements, Managerial Independence of
Elements, Evolutionary Development, Emergent Be-
havior, and Geographical Distribution of Elements.
2.2 Operating Mode Management for
SoS
In this paper and to study its dynamic, SoS is studied
as a Discrete-Event System (DES). There are several
methods proposing safe control and able to cope with
systems complexity in the DES domain. Among these
methods, Supervisory Control Theory (SCT) seems to
be more convenient for mode management by distin-
guishing process and specifications. Initiated by (Ra-
madge and Wonham, 1989), SCT is the theory of ana-
lyzing discrete event control systems and it allows the
definition of different control strategies for each oper-
ating mode based on operating modes management.
This technology aims to ensure the switching from
one operating mode to another one according to the
user input and safety requirements and it is the sub-
ject of several researches (Kamach et al., 2003; Kadri
et al., 2013; Kadri et al., 2017).
In order to define separate behavior of each sys-
tem of an SoS, we consider the multi-model approach.
This approach assumes that only one operating mode
is activated at a time for each system, while the oth-
ers are deactivated. This allows us to define separate
models for each system. Each model is a process
functioning description represented by a HLPN and
the process is made up of several components.
2.3 High Level Petri Net (HLPN)
HLPNs are a graphical and mathematical modeling
tool. Among the types of HLPN, we use particu-
larly the Hierarchical Prioritized Colored Petri Net
(HPCPN).
2.3.1 Prioritized Colored Petri Net (CPN)
A CPN is a 7-tuple < P,T,K,W
−
,W
+
,Φ,M
0
,Π >
where P is a set of places; T is a set of transitions
(P ∩ T =
/
0 , P ∪ T 6=
/
0); K is a color domain func-
tion defined from P∪T into finite and non-empty sets;
W
−
,W
+
, defined on P × T → IN, are the backward
and forward incidence functions, respectively, which
specify the arcs connecting places and transitions; Φ
is a guard function, it is a boolean expression attached
to a transition t ∈ T and by default Φ(t) is evaluated to
true; M is a function defined on P describing the ini-
tial marking; Π is a priority function. It maps transi-
tions into non-negative natural numbers representing
their priority level.
2.3.2 Hierarchical Colored Petri Net (HCPN)
HPN allows to split models of large systems into man-
ageable modules with well-defined. HCPN allows to
split models of large systems into manageable sub-
modules with well-defined. It permits to work at dif-
ferent abstraction levels and have the model reflect the
structure of the system. It also allows to create build-
ing submodels that are used repeatedly in the HCPN
model.
3 HIERARCHICAL SOS
DESIGNING
3.1 Proposed Approach
The proposed approach has the purpose to provide an
bottom up approach to SoS design with all its systems
and with the actions of reconfiguration in a hierarchi-
cal way. The first step is Components Design in which
components are modeled in separate HLPN sheets in
according to their specifications. The second step is
called Modes Design and it consists to study indepen-
dently and separately each operating mode with ap-
plying conventionally the SCT. In fact, in any system,
operating modes engage a set of components and ful-
fil requirements that may be very different from other
ones. In the proposed approach, and through the use
of hierarchical Petri nets, an operating mode model
is a top layer to component models containing substi-
tution transitions, each one is associated with a com-
ponent’s subnet. Furthermore, a notion of common
component is presented in this step to reduce the size
of the global model. The third step is Systems Design
and it allows to model each system with its actions of
reconfiguration. Each system model is a top layer of
its operating mode models and it integrates a switch-
ing mechanism allowing to commit from one mode to
another. The last step is SoS Design in which the de-
pendencies between the systems are modeled follow-
ing a request for reconfiguration. This step models of
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
378

the upper layer of the presented model.
Next subsections detail each step. But first, let de-
note S = {S
1
,S
2
,..,S
|S|
} the set of all systems of an
SoS where |S| > 1, M
i
= {M
i,1
,M
i,2
,..,M
i,|M
i
|
} the set
of operating modes of a system S
i
, i ∈ {1..|S|} where
|M
i
| ≥ 1 and C
i
= {C
i,1
,C
i,2
,..,C
i,|C
i
|
} the set of com-
ponents of S
i
where |C
i
| ≥ 1. Let also C
M
i, j
⊆ C
i
be the set of components that made up the mode
M
i, j
, M = {M
1
,M
2
,..,M
|S|
} be the set of all operat-
ing modes and C = {C
1
,C
2
,..,C
|S|
} be the set of all
components.
3.2 Components Design
Each system is made up by several components
whose behavior is the same regardless of the system
mode and it includes possible failures and recoveries
and communication ports. At this stage, we aim
to model components in separate pages. So, for
each component, we associate a CPN describing its
component behavior.
Definition 1. Let S be the set systems of an SoS
and let C
i
be the set of components of a system S
i
where S
i
∈ S. A component C
i, j
where i ∈ {1..|S|}
and j ∈ {1..|C
i
|} is modeled by a CPNs with <
P
C
i, j
,T
C
i, j
,K
C
i, j
,W
C
i, j
−
,W
C
i, j
+
,Φ
C
i, j
,M
C
i, j
0
> where:
P
C
i, j
= P
C
i, j
∪ P
C
i, j
with P
C
i, j
∩ P
C
i, j
=
/
0. P
C
i, j
and
P
C
i, j
are, respectively, internal places and fusion
(shared) places of the component C
i, j
.
T
C
i, j
= T
C
i, j
∪ T
C
i, j
with T
C
i, j
∩ T
C
i, j
=
/
0. T
C
i, j
and
T
C
i, j
are, respectively, internal transitions and
switching transitions of the component C
i, j
.
3.3 Modes Design
The objective of this section is to ensure the internal
behavior of the operating modes and that they are
well-built and reliable according to the requirements.
The commutation from one operating mode to an-
other leads to change of the process model structure
by engaging new components and by releasing others
ones. Therefore, each mode has to fix the set of com-
ponents necessary to perform its tasks according to
the specification. It has also to differentiate between
its own components, used in only one operating
mode, and its common components, used in two or
more operating modes of the same system. Formally,
Definition 2. Let S
i
∈ S and M
i, j
∈ M
i
.
A component C
i,k
, k ∈ 1..|C
i
|, is called own to M
i, j
if
C
i,k
∈C
M
i, j
and ∀M
i,p
∈ M
i
, such as p 6= j, C
i,k
/∈C
M
i,p
.
A component C
i,k
, k ∈ 1..|C
i
|, is called common to
M
i, j
and M
i,p
if C
i,k
∈ C
M
i, j
∩C
M
i,p
with j 6= p.
Let denote C
M
i, j
= C
M
i, j
∪C
⇔
M
i, j
where:
• C
M
i, j
is the set of its own components;
• C
⇔
M
i, j
is the set of its common components.
Conceptually, we aims to model the operating
modes by applying the multi-model approach, which
involves designing a process model structure for each
operating mode through the use of hierarchical CPN
bottom-up. Each mode model is a superpage con-
taining substitution transitions, each of which is as-
sociated to a subpage representing one model com-
ponent. Superpages and subpages are connected by
substitution transitions and by equating places on the
two pages.
For common components, substitution transitions re-
fer to the same subpage. So other instances of the
selected component are created. Then, each place of
the different instances is fused with the corresponding
one to ensure an instances identical functioning repre-
senting the same common component. Accordingly,
any state change made to one instance applies to all
other instances as well. This keeps the behavior of
common components when switching from one mode
to another.
In the following Algorithm 1, we present the different
steps to create mode models. First, for simplicity rea-
sons, we confuse the notation M
i, j
of a mode identity
and its associated HCPN and the notation of C
i, j
of a
mode identity and its associated CPN.
Nevertheless, these mode models are not intercon-
nected, and this is the main focus of the next section.
3.4 Systems Design
This section focuses on the design of all the systems
comprising the SoS. Each system is designed and
developed separately by taking the behavior that
could lead to switching between modes into account.
This guarantees a functioning under failure, whilst
causing degraded production. The proposed frame-
work allows to model each system as a superpage for
its mode pages in which we handle the commutation
problem and we add substitution transitions, each
of which is associated to a subpage representing an
operating mode.
In the presented framework, the switching mech-
anism is modeled by the T
C
i,k
transitions where
i ∈ {1..|S|} and k ∈ {1..|C
i
|}. Firing such transition
must disable the transitions of their corresponding
HCPL mode and enable firing the transitions of
Formal Approach to Dynamic SoS Design
379

the destination HCPN mode. To distinguish this
type of transitions, we define an application noted
target mode whose role is to associate with each
transition its destination mode.
Algorithm 1: Pseudo-algorithm generating HCPN of the
operating modes.
Input: the set S of systems; the set M of
modes; the set C
M
i, j
of M
i, j
components (i = 1..|S|, j = 1..|M
i
|);
the set of CPN C;
Output: the set of HCPN M
i, j
foreach system, i ← 1to |S| do
foreach mode, j ← 1to |M
i
| do
Create page M
i, j
;
foreach component C
i,k
∈ C
M
i, j
do
Add substitution transition, T
m
i, j,k
,
in M
i, j
associated with C
i,k
;
foreach P
C
i,k
∈ P
C
i,k
do
Add P
C
i,k
in M
i, j
;
Add port-type tag on C
i,k
;
Add arc connecting P
C
i, j
to
T
m
i, j,k
;
end
if C
i,k
∈ C
⇔
M
i, j
then
foreach M
i,p
, p ← 1to j do
if C
i,k
∈ C
⇔
M
i,p
then
Fusion P
C
i,k
in
instances of M
i, j
and
M
i,p
;
end
end
end
end
end
end
Definition 3. Let S
i
∈ S, M
i, j
∈ M
i
and T
M
i, j
be the
related set of transitions.
Let target mode : T
M
i, j
→ M
i
be a mapping such that
target mode(t) indicates the active operating mode
after firing t,∀t ∈ T
M
i, j
.
Remark 1. Let T
M
i, j
⊂ T
M
i, j
be the related set of
switching transitions. ∀t ∈ T
M
i, j
, t corresponds to a
switching mechanism of mode M
i, j
leading to mode
target mode(t).
Moreover, new elements must be added to each
system S
i
in order to ensure the switching mechanism:
• Class color Mode
• Place Mode Mgt S
i
marked by one token repre-
senting the initial mode;
• Arcs connecting Mode Mgt S
i
to non-switching
transitions and labelled by M, where M is a vari-
able defined on Mode
• ∀C
i,k
∈ C
⇔
M
i, j
and ∀t ∈ T
C
i,k
, a predicate is as-
signed and it is satisfied as soon as the token of
Mode Mgt S
i
has the value of a mode including
the component.
• ∀C
i,k
∈ C
M
i, j
and ∀t ∈ T
C
i,k
, a predicate is assigned
and it is satisfied only when the appropriate token
is in Mode Mgt S
i
.
• ∀C
i,k
∈ C
M
i, j
and ∀t ∈ T
C
i,k
, t is connected to
Mode Mgt S
i
with an input label M, and with an
output label set to its target mode.
Algorithm 2 describes the necessary steps to create a
HCPN allowing the operating mode management of
each S
i
.
3.5 SoS Design
In this section, we create the top-level net of the
HCPN in which we guarantee a coherent behavior of
the whole SoS despite failures occurring. Indeed, we
aim to maintain an acceptable SoS operation when a
system switches to a degraded mode. We therefore
develop the following idea: if a system goes into de-
graded mode, a subset of systems will be affected and
will have to switch off or to switch to another de-
graded in which a minimum operation is ensured un-
der a revised control policy.
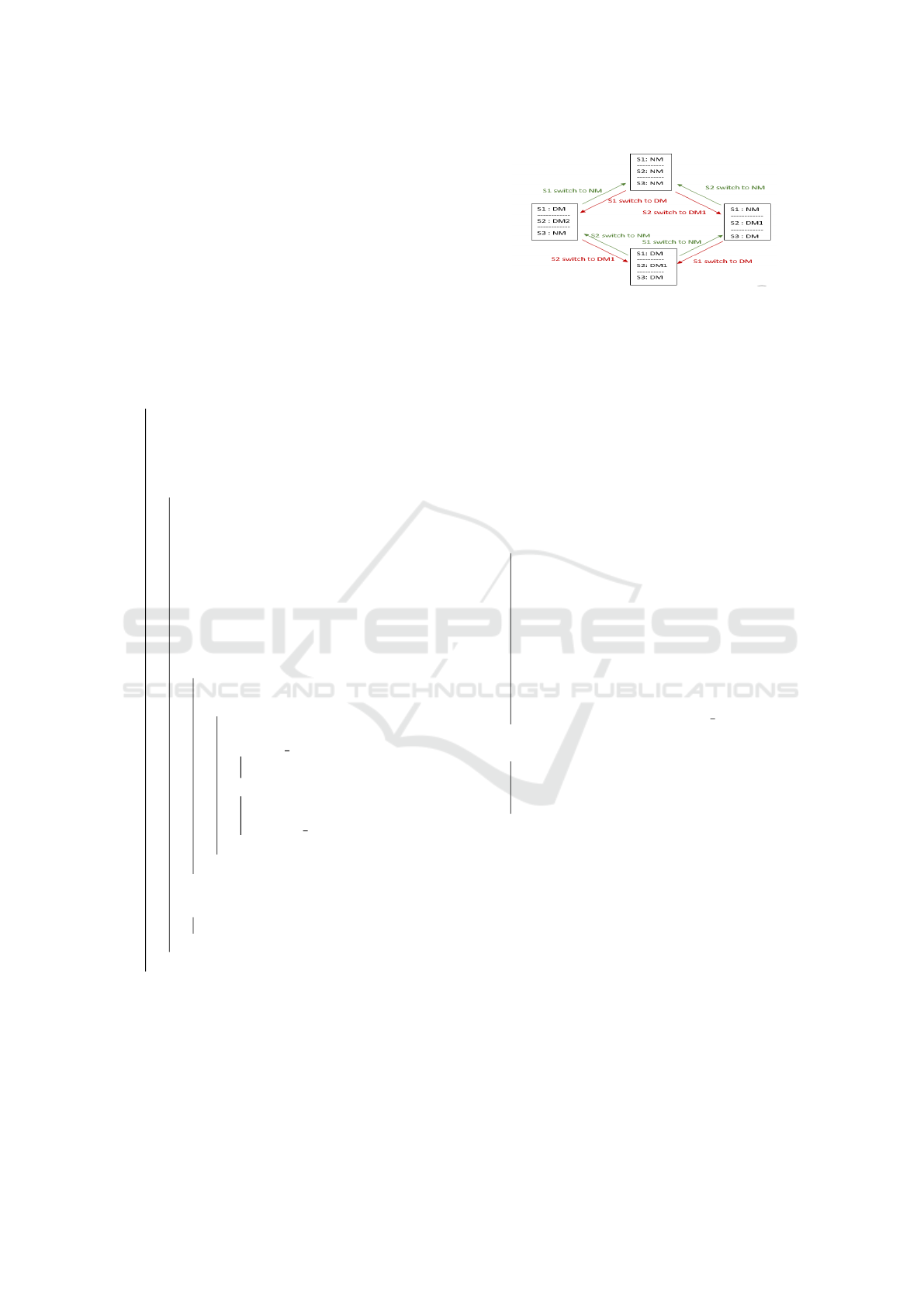
First, a systems decomposition of the SoS should be
modeled and verified checked against the specifica-
tion. Figure1 illustrates an example of systems de-
composition. There are three systems: S1, S2 and S3.
S1 and S3 are composed of two modes: NM for nom-
inal mode and DM for degraded mode while S2 is
composed of three modes: NM for nominal mode and
DM1 and DM2 for its two degraded modes. Initially,
all the three systems are in NM. When S1 (resp. S2)
switches to DM (resp. DM1), S2 (resp. S3) also has
to switch to DM2 (resp. DM1). And when S1 (resp.
S2) reverts to the initial mode, S2 (resp. S3) also has
to return to MN. If S2 is in DM, the switching of S1
from NM to DM and vice versa does not influence
the SoS. However, if S1 is in DM and S2 switches to
DM1, then S3 should switch to DM; and if S2 return
to DM2, S1 should return to NM.
At this top layer, a dependency mechanism is
ensured through a new set of high priority transitions,
called set of dependency transitions and noted T
!
.
Each transition of the layer level SoS has the role
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
380
of associating with a subset of systems their new
operating modes according to an internal change of
mode in one system. We define an application noted
dependency whose role is to ensure reconfiguration
relations between systems:
Algorithm 2: Pseudo-algorithm generating HCPN of sys-
tems.
Input: the set S of systems; the set M of
modes; the set of HCPN M
i, j
(i = 1..|S|, j = 1..|M
i
|); the set of
CPN C;
Output: the set of HCPN S
i
foreach system, i ← 1to |S| do
Create page S
i
;
K = K ∪ Mode;
Add place Mode Mgt S
i
;
M
0
(Mode Mgt S
i
) = M
i,1
;
foreach mode, j ← 1to |M
i
| do
Add substitution transition, T
m
i, j
,
associated with M
i, j
in S
i
;
Add arc connecting Mode Mgt S
i
to
T
m
i, j
Add place Mode Mgt S
i
in M
i, j
;
Add arc connecting Mode Mgt S
i
to
T
C
i,k
in C
i,k
;
Add port-type tag on M
i, j
;
foreach C
i,k
, k ← 1to |C
i
| do
Add place Mode Mgt S
i
in C
i,k
;
foreach t ∈ T
C
i,k
do
W
C
i,t
−
(Mode Mgt S
i
,t) = M;
if target mode(t) = M
i, j
then
W
C
i,t
+
(Mode Mgt S
i
,t) = M
else
W
C
i,t
+
(Mode Mgt S
i
,t) =
target mode(t)
end
end
end
foreach t ∈ T
C
i,k
do
Φ(t) = Φ(t) ∧ [M = M
i, j
]
end
end
end
Definition 4. Let S
0
⊆ S be a subset of system,
M
0
⊆ M be its set of related operating mode and T
!
be the set of dependency transitions. Let dependency
: T
!
→ M
|S
0
|
be a mapping such that dependency(t)
indicates the activated operating mode of each S
0
after firing t.
Figure 1: Example of systems decomposition inside an SoS.
Algorithm 3: Pseudo-algorithm generating HPCPN of SoS.
Input: the set S of systems; the set M of
modes; the set of HCPN M
i, j
(i = 1..|S|, j = 1..|M
i
|);
Output: the final HPCPN SoS
Create page SoS;
K = K ∪ ModeSoS;
Add place SoS Mode Mgt ;
Add transitions T
!
;
Add arcs SoS Mode Mgt to T
!
;
M
0
(SoS Mode Mgt) = empty;
foreach system, i ← 1to |S| do
M
0
(SoS Mode Mgt) =
M
0
(SoS Mode Mgt) + +(S
i
,M
i,1
);
Add substitution transition, T
m
i
,
associated with S
i
in SoS;
Add place Mode Mgt S
i
in SoS;
Add arc connecting Mode Mgt S
i
to T
m
i
;
Add arc connecting Mode Mgt S
i
to T
!
;
W
−
(Mode Mgt S
i
,t) = M
i,1
;
W
+
(Mode Mgt S
i
,t) = target mode(t);
end
foreach t ∈ T
!
do
W
+
(SoS Mode Mgt,t) =
M
0
(SoS Mode Mgt);
W
−
(SoS Mode Mgt,t) = dependency(t);
end
Some new elements also are added to this layer to en-
sure the dependency mechanism:
• Class color ModeSoS such as ModeSoS =
∪(S
i
,Mode);
• Place SoS Mode Mgt marked by as many tokens
as systems in the SoS and each one contains the
identity of its corresponding system and its initial
mode;
• Transitions T
!
;
• ∀t ∈ T
!
, t is connected to the place
SoS Mode Mgt with an input label set of
systems current modes, and with an output label
set to their new modes; t is connected to a
Formal Approach to Dynamic SoS Design
381
Restart_M11
M11
1`P11
Produce_M11
M11
Buffer1
Out
Product
Mode Mgt
System 1
In/Out
Mode
N
In/Out
Raw Materials Receipt_M11
[M=N]
Place Workpiece_M11
[M=N]
Faillure
Repair
P11
P11
P11
P11
p
N
D
P11
N
P11
M
D
M
Out
(a) HLPN of M11.
Restart_M12
M12
1`P12
Produce workpiece_M12
M12
Buffer1
Out
Product
Mode Mgt
System 1
In/Out
Mode
N
Raw materials receipt _M12
[M=D]
Place workpiece M12
[M=D]
P12
P12
P12
p
P12
M
M
In/Out
Out
(b) HLPN of M12.
Restart_M13
Fusion R13
M13
1`P13
Fusion R13
Produce workpiece_M13
Fusion P13
M13
Fusion P13
Buffer1
In
Product
Mode Mgt
System 1
In/Out
Mode
N
Picks up workpiece _M13
[M=D orelse M=N]
End production _M13
[M=D orelse M=N]
P13
P13
P13
P13
p
M
M
In/Out
In
(c) HLPN of M13.
Restart_M21
M21
1`P21
Produce_M21
M21
Buffer
Out
Product
Mode Mgt
System 2
In/Out
Mode
N
Raw materials receipt_M21
[M=N]
Place workpiece_M21
[M=N]
P21
P21
P21
P21
p
M
M
In/Out
Out
(d) HLPN of M21.
Restart_M22
Fusion R22
M22
1`P22
Fusion R22
Produce workpiece_M22
Fusion P22
M22
Buffer
Out
Product
Mode Mgt
System 2
In/Out
Mode
N
Raw materials receipt _M22
[M=N orelse M=D]
Place workpiece M22
[M=N orelse M=D]
P22
P22
P22
p
P22
M
M
Fusion P22
Out
In/Out
(e) HLPN of M22.
Restart_M23
M23
1`P23
Produce workpiece_M23
M23
Buffer
In
Product
Mode Mgt
System 2
In/Out
Mode
N
Picks up workpiece _M23
[M=N orelse M=D]
End production _M23
[M=N orelse M=D]
P23
P23
P23
P23
p
M
M
In
In/Out
(f) HLPN of M23.
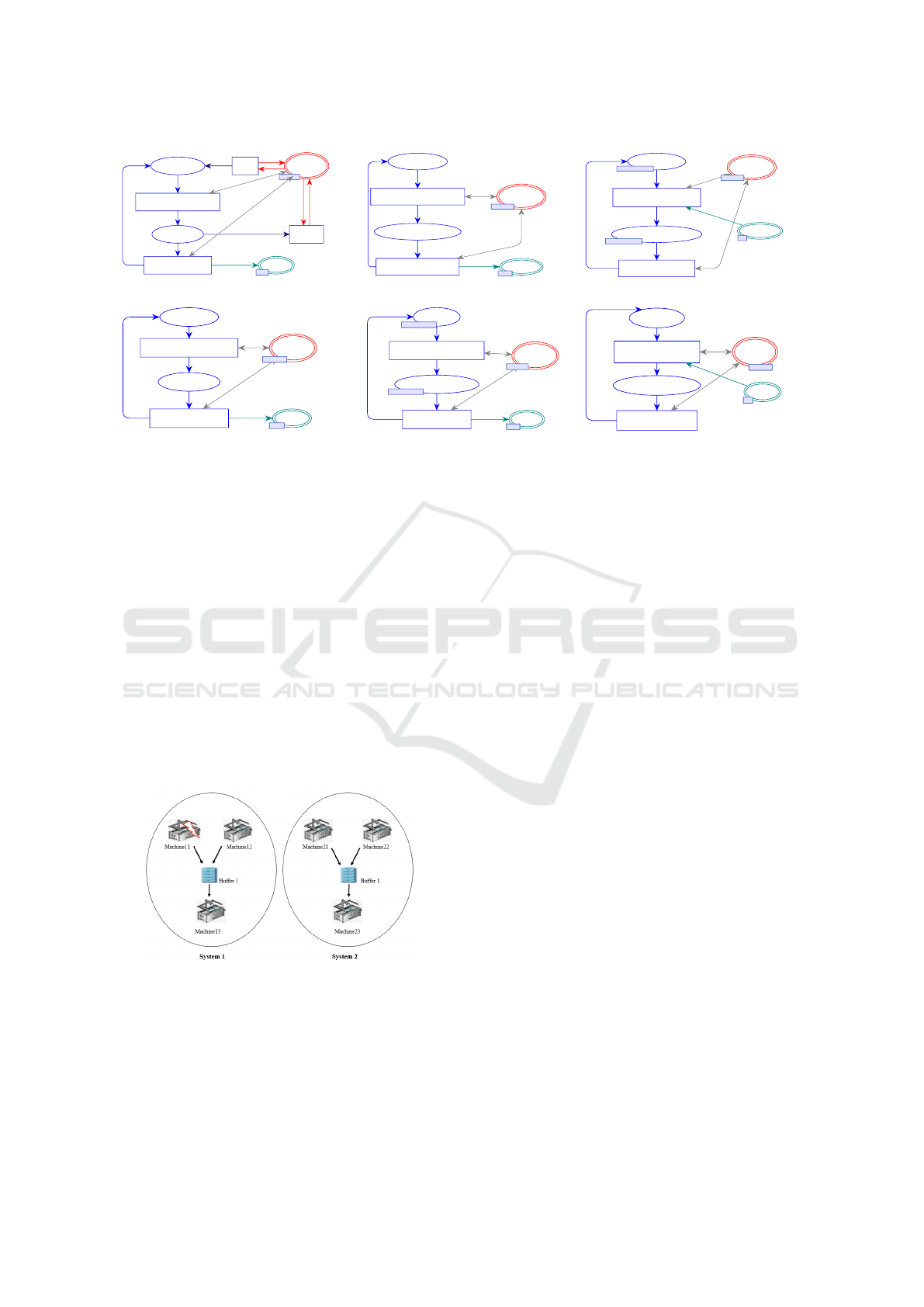
Figure 3: vHLPN of the SoS components.
Mode Mgt S
i
with an input/output label M, where
M is a variable defined on Mode.
Algorithm 3 creates the last layer of our framework
that represents the whole management of the SoS.
4 CASE STUDY
4.1 System Description
We illustrate our contribution with a manufacturing
SoS inspired from literature. This SoS features two
systems, each one is composed by three components
and one buffer as shown in Figure 2. System1
Figure 2: Manufacturing SoS.
treats workpieces type A. Thereafter, these work-
pieces are delivered to System2 in order to be used
in the treatment of workpieces type B. The function-
ing of System1 is as follows: M
1,1
takes one by one
workpieces from an upstream stock, achieves a treat-
ment and then deposits it in an intermediate buffer.
M
1,3
takes one by one workpieces from the buffer,
achieve a treatment and then deposit it in a down-
stream stock. Once workpieces type A arrive to
system2, M
2,1
and M
2,2
, which are quite similar, take
two workpieces of which one is type type A from an
upstream stock, achieves a treatment and then deposit
in an intermediate buffer. Afterwards, the workpieces
type B product is treated by the machine M
2,3
.
It is assumed System1 can break down on M
1,1
and be
repaired. If a failure occurs, M
1,2
, which is less effi-
cient than the defective machine, replaces it and the
concerned system goes into degraded mode. A tran-
sition to a degraded mode of System1 influences the
operation of the entire SoS: System2 will no longer
be supplied with adequate quantities and will then go
into degraded mode: M
2,2
goes into sleep mode.
The functioning of the example studied enables us to
define for each system two operating modes: nominal
and degraded. Formally, an S = {System1,System2}
where System1 = {M
1,1
,M
1,2
,M
1,3
} and System2 =
{M
2,1
,M
2,2
,M
2,3
}. The stock is not considered a
component but rather as a system specification. This
corresponded to a classic choice of SCT (Ramadge
and Wonham, 1989) constraint because the stock is
no generator events that its own.
4.2 Components Model
In our studied SoS of the Figure 2, there
are 6 components spread over two systems.
C = {M
1,1
,M
1,2
,M
1,3
,M
2,1
,M
2,2
,M
2,3
}.
For system
1
, the functioning of M
1,1
is represented by the state machine of
Figure3(a) made up of places P
M11
=
{StartM11,TreatmentM11}, transitions T
M11
=
{TakeWorkpieceM11, PlaceWorkpieceM11}, and
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
382
the related arcs labelled by the P
1
1 that is defined by
the colour class M11 = P11. M
0
(StartM11) = 1‘P11
(one token P11). T
M11
= {Failure,Repair}, is the
switching transitions. As in the following component
models, place P
M11
= {Bu f f er1} is a communica-
tion places, it aims to store workpieces produced; and
the place ”Mode Management System S1” is added
in the system design step.
The functioning of M
1,2
(Figure 3(b))
is represented by places P
M12
=
{StartM12,TreatmentM12}, transitions T
M12
=
{TakeWorkpieceM12, PlaceWorkpieceM12} and the
arcs labelled by P12 defined on M12 = {P12}.
The behavior of M
2,2
(Figure 3(e))
is represented by places P
M22
=
{StartM22,TreatmentM22}, transitions
T
M22
= {TakeWork pieceM22,EndTreatmentM22}
and arcs labelled by P22 defined on M22 = P22.
The behavior of M
2,3
(Figure3(f))
is represented by places P
M23
=
{StartM23,AssemblageM23}, transitions T
M23
=
{TakeWorkpiecesM23, PlaceWorkpieceM23} and
arcs labelled by PM23 defined on M23 = P23;
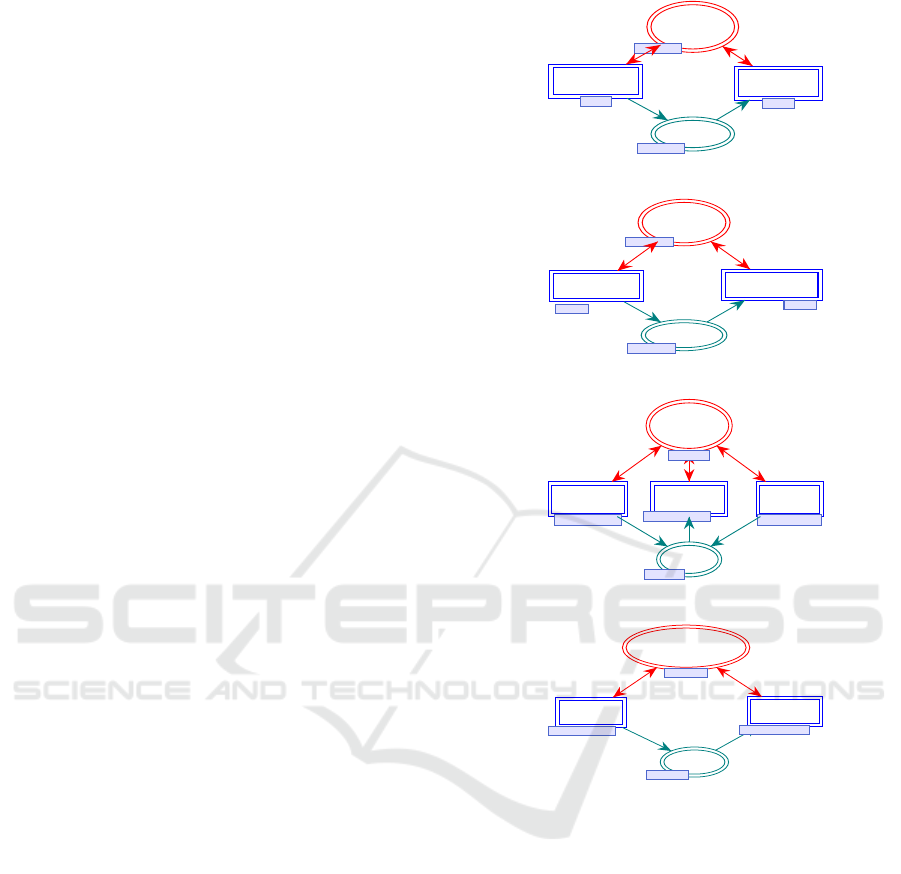
4.3 Modes Model
At this layer, we can notice, for System1 that M
13
is
engaged in its two operating modes, while M
12
does
not contribute to production in Nominal1 but it in-
tervenes when a commutation to Degraded1 is per-
formed. And for System2 that all machines are en-
gaged in Nominal2, however only M
21
and M
23
are
engaged in Degraded2. We then get C
M
Nominal1
=
M11, C
M
Degraded1
= M12, C
⇔
Nominal1
= C
⇔
Degraded1
=
M13, C
M
Nominal2
= M22 and C
⇔
Nominal2
= C
⇔
Degraded2
=
M21,M23.
By applying Algorithm 1, we obtain four HCPNs,
each one represents an operating mode of the stud-
ied SoS: Figure4(a) and Figure4(b) represent the
operating modes of System1, while Figure4(a) and
Figure4(b) represent those of System2.
4.4 Systems Model
For System1, Nominal1 mode is composed of the
components M
11
and M
13
. From this mode, a
switch is possible to Degraded1, by the switch event
”Failure” generated if the component M
11
breaks
down, Degraded1 is composed of the components
M
23
, common component with Nominal1, and M
12
.
When M
11
generates the event ”recovery”, System1
switches to the first mode.
In the same way, For System2, Nominal1 mode is
Mode Mgt
System 1
In/Out
Mode
N
In/Out
Buffer1
In/Out
Product
In/Out
Machine11
M11M11
Machine13
M13M13
(a) HLPN of System1 nominal mode.
Mode Mgt
System 1
In/Out
Mode
N
In/Out
Buffer1
In/Out
Product
In/Out
Machine12
M12M12
Machine13
M13M13
(b) HLPN of System1 degraded mode.
Mode Mgt
System 2
In/Out
Mode
N
Buffer S1
In/Out
Product
Machine1
Machine 21Machine 21
Machine2
Machine 23Machine 23
Machine3
Machine22Machine22
In/Out
In/Out
(c) HLPN of System2 nominal mode.
Mode
Management
System2
In/Out
Mode
N
Buffer
In/Out
Product
Machine3
Machine22
Machine2
Machine 23
Machine22
Machine 23
In/Out
In/Out
(d) HLPN of system2 degraded mode.
Figure 4: HLPN of the SoS modes.
composed of the components M
21
, M
22
and M
23
. A
switch is possible from Nominal2 to Degraded2 if a
request for switching happens. Likewise, a switch to
Nominal2 from Degraded2 can be performed follow-
ing a switching request.
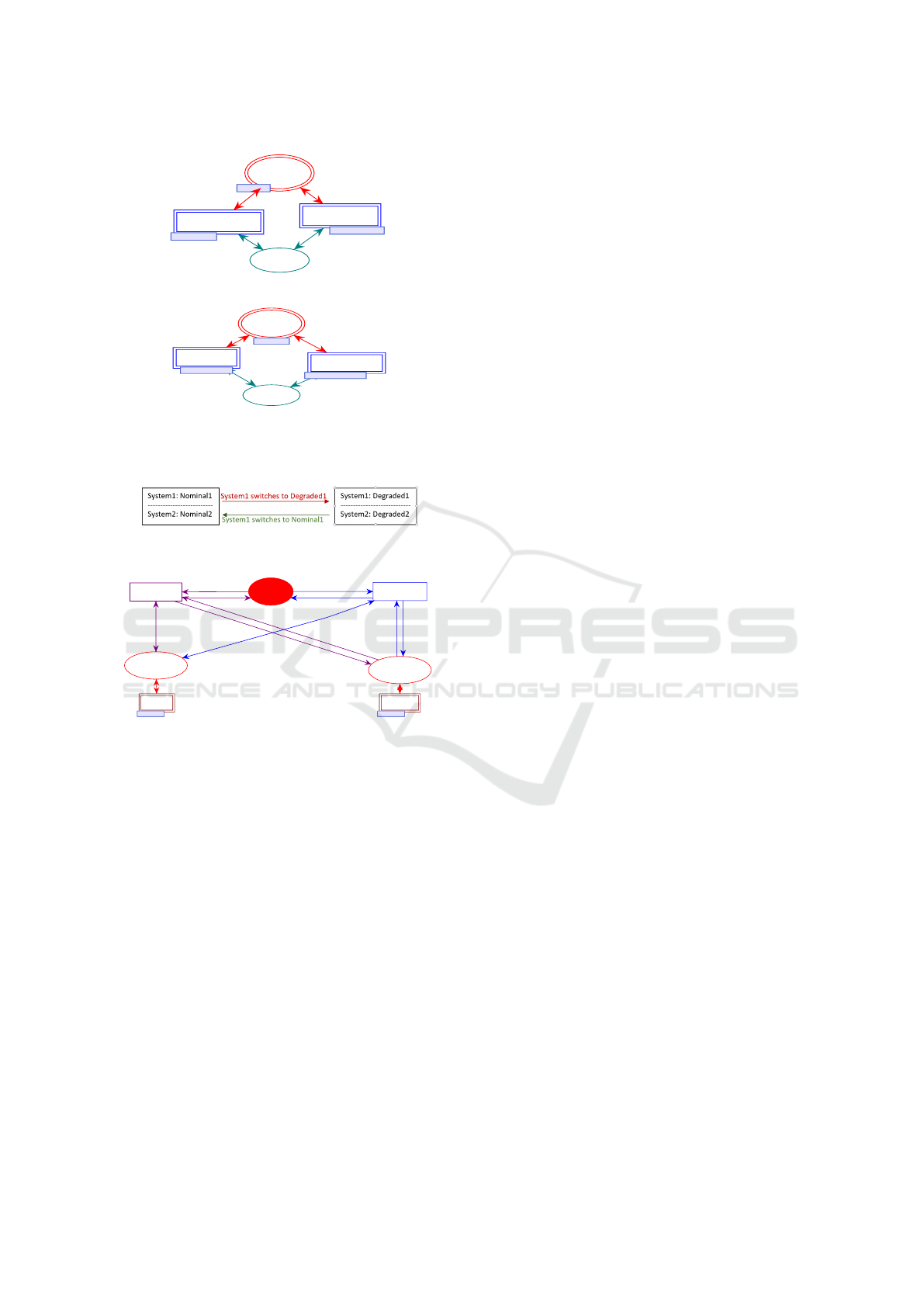
The third HCPN layers obtained is represented in
Figure5(a) and 5(b).
4.5 SoS Model
Figure6 shows systems dependencies inside our stud-
ied SoS: a switching of System1 to its degraded mode
imposes on System2 a commutation to degraded mode
and and vice versa.
The final layer of the study example is represented
in Figure7 and it is obtained after generating Algo-
rithm 3.
Formal Approach to Dynamic SoS Design
383
Mode Mgt
System 1
In/Out
Mode
N
In/Out
Buffer1
Product
Nominal1
Nominal1Nominal1
Degraded1
Degraded1Degraded1
(a) A modal decomposition of System1.
Mode Mgt
System2
In/Out
Mode
N
Buffer
Product
Nominal2
Nominal 2
Degraded2
Degraded 2
Nominal 2
Degraded 2
In/Out
(b) A modal decomposition of System2.
Figure 5: A modal decomposition of each system of the
studied SoS, with the components used in each mode.
Figure 6: Systems decomposition.
SoS
Mode Mgt
ModeSoS
1`(S1,N)++1`(S2,N)
Mode Mgt
System 2
Mode
N
Mode Mgt
System 1
Mode
N
Failure System1
P_HIGH
Recover System1
P_HIGH
System1
System1System1
System2
System2System2
1`(S1,N)++1`(S2,N)
1`(S1,D)++1`(S2,D)
N
D
D
N
1`(S1,D)++1`(S2,D)
1`(S1,N)++1`(S2,N)
N
D
Figure 7: SoS design layer.
5 CONCLUSION
The contribution of this paper is to present a hierarchi-
cal framework using HLPN and allowing to control
the dynamic inside and between systems of an SoS
whose systems are modeled using multimodel ap-
proach. In fact, when an exceptional event occur in a
system, it switches to another operating mode in order
to maintain an acceptable functioning. This switching
causes a reconfiguration inside the SoS. The proposed
framework decomposes the systems of an SoS in sev-
eral operating modes and each one is decompose in
components. The first step of the framework is the
component design where each component is designed
independently. The second step is the mode design
where operating modes are studied and also modeled
independently on formal way. The third step focuses
system design with all operating modes including its
different switch dynamics by using SCT. The last step
is to model the dependencies between the systems.
Current research involves defining strategies when the
similarities between components and modes can be
noticed in order to reduce the complexity of the SoS.
REFERENCES
Caballini, C., Sacone, S., and Siri, S. (2012). The port as
a system of systems: A system dynamics simulation
approach. Proc. 7th Int. Conf. Syst. Syst, Genoa, Italy.
Checkland, P. B. (1999). Systems thinking, systems prac-
tice. Chichester, UK: John Wiley and Sons Ltd.
DoD (2008). System of systems engineering. In Defense
Acquisition Guidebook (DAG). Washington, DC: Pen-
tagon.
Huynh, T. V. and Osmundson, J. S. (2006). A systems en-
gineering methodology for analyzing systems of sys-
tems using the systems modeling language (sysml).
Proc. 2nd Syst. Syst. Eng. Conf.
ISO/IEC/IEEE 15288 Annex G (ISO, . (2015). Systems and
software engineering – system life cycle processes. In
Geneva, Switzerland: International Organisation for
Standardisation / International Electrotechnical Com-
missions / Institute of Electrical and Electronics Engi-
neers.
Jamshidi, M. (2008). Systems of systems engineering: Prin-
ciples and applications. New York, NY, USA: Taylor
& Francis.
Kadri, H., Ahmed, S. B., and Collart-Dutilleul, S. (2017).
Formal approach to control design of complex and
dynamical systems. In Procedia Computer Science
108C:2512-2516, pages: 2512-2516. Elsevier B.V.
Kadri, H., Schleiner, S., Collart-Dutilleul, S., Bon, P.,
Ahmed, S. B., Steyer, S., Gabriel, F., and Aim
´
e, A. O.
(2018). Proposition of a formal model for crisis man-
agement in the context of high-speed train networks in
border areas. In the proceeding of Transport Research
Arena 2018 (TRA 2018), 16-19th April, Vienna, Aus-
tria.
Kadri, H., Zairi, S., and Zouari, B. (2013). Global model for
the management of operating modes in discrete event
systems. In 6th IFAC Conference Management and
Control of Production and Logistics, Volume 6 — Part
1, Fortaleza, Brazil, September 11-13.
Kamach, O., Pietrac, L., and Niel, E. (2003). Multi-
model approach for discrete event systems: applica-
tion to operating mode management. In Multiconfer-
ence Computational Engineering in Systems Applica-
tions, CESA, Lille.
Maier, M. W. (1998). Architecting principles for systems-
of-systems. In Systems Engineering, vol. 1, no. 4, pp.
267–284.
Ramadge, P. and Wonham, W. (1989). The control of dis-
crete event systems. In Proceedings IEEE, vol.77,
num 1, pp. 81-98.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
384
