
Social Robots in Collaborative Learning: Consequences of the Design on
Students’ Perception
Alix Gonnot
1
, Christine Michel
1
, Jean-Charles Marty
2
and Am
´
elie Cordier
3
1
INSA de Lyon, Univ Lyon, CNRS, LIRIS, UMR 5205, F-69621 Villeurbanne, France
2
Universit
´
e de Savoie Mont-Blanc, CNRS, LIRIS, UMR 5205, F-69621 Villeurbanne, France
3
Hoomano, Lyon, France
Keywords:
Collaborative Learning, Social Robots, Human-robot Interaction.
Abstract:
The interest in using social robots in education is growing as it appears that they could add a social dimension
that enhances learning. However, there is little use of robotics in collaborative learning contexts. This shows
a lack of knowledge about students’ perception of social robots and their use for education purposes. This
paper aims to fill this gap by analyzing, with experimental methods: (1) the influence of specific ways of
interaction (facial expressions, voice and text) on the students’ perception of the robot and, (2) students’
acceptability criteria for using robots in a classroom. The target objective is to help the design of future
learning situations. The study shows that the ways used to interact produce significant differences in the
perception of the animation, the likeability, the attractiveness, the safety and the usability of the robot. The
study also shows that major improvements must be made on the design of the hedonic characteristics of the
interactions, especially identification and stimulation, to favor the student’s acceptance of this kind of learning
support tools.
1 INTRODUCTION
Robots are increasingly used in education where they
can serve many purposes (e.g. tools to learn how
to develop software, telepresence) and more recently,
social robots offer a new opportunity for supporting
people in various tasks. We believe that social robots
can improve collaborative learning since they can
bring back the social dimension, essential for learn-
ing, into the standard tools used in Computer Sup-
ported Collaborative Learning (CSCL).
1.1 Collaborative Learning
Dillenbourg (1999) defines collaborative learning as
a type of learning where two or more people try to
learn something together. This form of learning is
known for being beneficial on various levels such as
academic, social and psychological (Laal and Ghodsi,
2012).
Jermann et al. (2004) exposed two different ap-
proaches to support collaborative learning. The struc-
turing approach supports collaborative learning by
carefully designing the activity beforehand. The reg-
ulating approach consists in mediating directly the in-
teractions within the group. Mirroring tools, meta-
cognitive tools and guiding systems can be used to
accomplish all or part of this process. However, a lot
of work remains to be done in order to support the
teacher in an effective way. The proposed numeric
tools are sometimes inadequate since they do not pro-
vide the necessary ”human interaction” that is central
for group regulation.
1.2 Social Robots
With the development of robotic technologies, the use
of robots inside classrooms is spreading. They are
currently mainly used as a new teaching tools (Church
et al., 2010) or as telepresence tools (Tanaka et al.,
2014).
Social robots are humanoid, autonomous robots
that provide users with ”social” abilities such as
communicating, cooperating or learning from peo-
ple. They usually communicate with humans through
channels that are typically dedicated to the communi-
cation with other humans (voice, gesture, emotions,
etc.). Most of the time, people anthropomorphize
them and assume they have a form of social intelli-
gence or social skills (Breazeal, 2003).
The social aspects of social robots can be inter-
esting in educational contexts. Social behaviour is
an essential, albeit tacit, component of the student-
teacher interaction (Kennedy et al., 2017). Robots are
Gonnot, A., Michel, C., Marty, J. and Cordier, A.
Social Robots in Collaborative Learning: Consequences of the Design on Students’ Perception.
DOI: 10.5220/0007731205490556
In Proceedings of the 11th International Conference on Computer Supported Education (CSEDU 2019), pages 549-556
ISBN: 978-989-758-367-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
549

presented as able to add embodiment and a social di-
mension to the learning activity (Mubin et al., 2013).
Saerbeck et al. (2010) also claim that ”employing so-
cial supportive behavior increases learning efficiency
of students”. Social characteristics of robots can thus
constitute a progress when compared with standard
tools. This statement leads us to consider robots as
potential regulating tools as those presented in Sec-
tion 1.1.
1.3 Social Robotics in Collaborative
Learning
Strohkorb et al. (2016) conducted an experiment to
find out if a social robot could influence the collabora-
tion between two children that were playing the same
game. Mitnik et al. (2008) proposed a framework for
a mediator robot and experimented on it. Short and
Mat
´
aric proposed a model formalizing a moderation
process (2015) and a moderation algorithm (2017)
that are designed to be used with social robots. The
human-robot interactions used in the various experi-
ments presented above are only one-way interactions,
usually robot to human. There are no communica-
tions between the students and the robot. Program-
ming robots to interact with humans is a demanding
technical challenge and today, a human cannot inter-
act with a social robot at the same level of complexity
they could interact with a human.
Furthermore acceptance problems arise when
social robots are used in class. According to
Sharkey (2016), social robots may generate privacy
issues because robots record and/or use informa-
tion about their environment and users. Moreover,
Sharkey asks if it is moral or safe to let humans think
that a machine is clever and to take the risk that they
become attached to it. It also seems problematic to
put a robot in charge of a classroom without human
supervision. However, it seems ”that the attitude to-
wards social robots in schools is cautious, but poten-
tially accepting” (Kennedy et al., 2016).
We are inclined to think that using specific means
of communication on the robot (displaying text, us-
ing its voice, etc.) will influence the students’ per-
ception of the device. The aim of the paper is to
find out which means of communication used by the
robot are the most adequate considering several di-
mensions. This is a prerequisite for setting up collab-
orative learning scenarios that use social robots. In
this study we choose to focus only on the students’
perception of the social robot during the interaction
(ethical problems related to the use of this technology
in the classroom are not considered).
In order to address those questions, we designed
an experiment that is described in the Method section
of this paper. We then expose the results and the im-
plications for our project in the Results and Discus-
sion sections.
2 METHOD
The goal of this experiment is to better understand the
students’ perception of a social robot guiding them
through a learning task and to determine whether this
perception is influenced by the use of certain func-
tionalities of social robots, namely text-to-speech and
the ability to express emotions.
During the experiment, the participants are di-
vided into groups of three and are guided by the robot
through a collaborative learning task. The robot gives
instructions to the groups using different interaction
modalities. The participants are then asked to fill out
a questionnaire about their perception of the robot.
2.1 Task
The collaborative task proposed to the participants is
a lesson on the use of decision matrix, a decision-
making method designed to evaluate several options
by comparing them on a finite number of criteria.
The robot instructs the participants to read a docu-
ment explaining what a decision matrix is and how to
use it. It then guides them through an exercise were
they are supposed to advise a fictional company on the
selection of new smartphones for its employees. The
robot gives step by step instructions to the participants
to make them fill and use the decision matrix to take
the decision. Once an instruction given by the robot
is completed by the group, the participants touch the
screen of the robot to get the next instruction.
Twice during the process, the robot gives feed-
back to the participants before giving the next in-
struction. The first piece of feedback is given when
the participants have chosen the criteria used to eval-
uate the smartphones and the second piece of feed-
back is given after the selection of the smartphone
accordingly to the data presented in the decision ma-
trix. Each time, if the participants provide the right
answer, the robot gives a positive feedback and if the
participants provide the wrong answer, the robot gives
a negative feedback and provides them with an indi-
cation to help pinpoint the error. The participants are
then given a chance to correct their answer and if they
are still wrong, the correct answer is offered to them.
CSEDU 2019 - 11th International Conference on Computer Supported Education
550

2.2 Robot
The robot we used for this experiment is a prototype
running on Android. This robot is a non-humanoid
robot equipped with motorized wheels. A tablet is
placed on its head and is usually used to display its
eyes. The robot is able to deliver information in var-
ious ways such as displaying text on its screen or
speaking. It is also able to display several facial ex-
pressions representing various emotions.
We combined those functionalities to build three
different behaviors. In the first behavior, the robot
shows a neutral expression all the time and instruc-
tions are given to participants in text form through a
dialog box displayed on the robot screen on top of
its eyes. The instructions are displayed for 30 sec-
onds on the screen. In the second behavior, the robot
shows a neutral expression all the time and instruc-
tions are pronounced out loud for the participants. In
the third behavior, instructions are also pronounced
out loud and a neutral expression is shown most of the
time. When the robot gives feedback to participants
however, a joyful facial expression is shown when
the feedback is positive and a sad facial expression
is shown when the feedback is negative. The voice
used in the second and third behavior is the default
Android text-to-speech voice.
Those three behaviors constitute our three condi-
tions for the experiment: Instructions given in text
form (C1), Instructions given with a neutral voice
(C2) and Instructions given with a neutral voice and
facial expressions (C3).
(a) Text (b) Neutral (c) Joyful (d) Sad
Figure 1: Elements displayed on the robot’s screen during
the experiment.
We believe that the participants’ perception of the
robot will vary if the robot uses its “social” func-
tionalities such as talking or showing facial expres-
sions. Our hypothesis can be formulated as: Partici-
pants will have a better perception of the robot when
it gives them instructions vocally with facial expres-
sions rather than with voice or text only (H1).
For the robot to deliver instructions and feedback
in a way that adapts to the participants progression
and errors, we chose to use the Wizard of Oz tech-
nique (Kelley, 1984) to control the robot. A human
operator is physically present in the room and makes
the robot react appropriately to the unfolding events.
For example, if the participants completed an instruc-
tion that had not been given yet, the operator would
make the robot skip this instruction. The operator
also decides if the answers provided by the partici-
pants are correct and chooses the error message deliv-
ered by the robot if needed. The participants were not
informed that the robot was entirely controlled by the
operator.
2.3 Questionnaire
At the end of the task, the participants are asked to
fill out a questionnaire meant to understand how the
participants of the study perceive the robot. The ques-
tionnaire is divided into two different parts.
In the first part, we chose to use the Godspeed
questionnaire (Bartneck et al., 2009) that is a stan-
dard questionnaire designed to measure user’s percep-
tion of a robot. As the Godspeed questionnaire does
not question the user about the usability of the robot
and the user experience, we decided to also use the
AttrakDiff questionnaire (Hassenzahl et al., 2003).
Since our participants are all students in France or
working in France, we chose to use French transla-
tions of the Godspeed and the AttrakDiff question-
naires to increase participants’ understanding of the
questions. For the Godspeed questionnaire, we chose
to offer our own translation, based on the one already
proposed on Bartneck’s website. For the AttrakDiff
questionnaire, we used the official translation (Lalle-
mand et al., 2015).
The second part of the questionnaire contains
three open-ended questions: ”What could we do to
improve the robot?”(Q1), ”Would you be ready to use
such a robot in class (or in a more general learning
situation)? Why?” (Q2) and ”Do you have other re-
marks?” (Q3).
2.4 Analysis
The first part of the questionnaire consists of two
semantic differential scale questionnaires: God-
speed and AttrakDiff. As recommended by the au-
thors (Bartneck et al., 2009) mean scores were com-
puted for each scale of the Godspeed questionnaire.
Five dimension are then analyzed: Anthropomor-
phism, Animation, Likeability, Perceived Intelligence
and Perceived Safety. The same processing was
applied to the AttrakDiff questionnaire (Hassenzahl
et al., 2003) for each of its scale. Four dimensions are
then analyzed: Pragmatic Quality, Hedonic Quality-
Stimulation, Hedonic Quality-Identification, Attrac-
tiveness. The ANOVA method was then used to de-
termine the influence of the conditions C1, C2, C3 on
these nine dimensions.
The second part of the questionnaire contains
Social Robots in Collaborative Learning: Consequences of the Design on Students’ Perception
551
open-ended questions. We carried out a thematic
analysis (Braun and Clarke, 2006) on the participants’
answers for questions Q1 Q2 and Q3. This analy-
sis highlighted two main types of themes: partici-
pants’ expectations about the robot (feedback, emo-
tions, dynamism) and robot’s means of interaction
(voice, movement, content). Another layer of anal-
ysis was added for question Q2 in order to determine
the valence of the answers. We identified three kinds
of answers: ”Yes”, ”No”, ”Yes, if improvements”.
2.5 Participants
21 persons participated to the experiment in total. The
participants were divided into groups of three and
each group was associated to one of the three con-
ditions described in Section 2.2. One group (3 partic-
ipants) was removed from the study because its mem-
bers did not all fill out the final questionnaire.
The remaining participants were equally dis-
tributed between the three conditions and the propor-
tions of male and female participants were equiva-
lent. The vast majority of participants are engineering
school students. Two participants are PhD students
and one is a young design engineer. Their ages range
from 20 to 26 years old.
3 RESULTS
3.1 Semantic Differential Scale
Questionnaires
In order to detect variations between the three condi-
tions in the Godspeed and AttrakDiff questionnaires
results, we used the ANOVA method. We performed
the tests on each scale of the two questionnaires to de-
termine whether the mean scores for each condition
were significantly different.
3.1.1 Godspeed Questionnaire
As shown on Table 1, significant differences exists be-
tween the three conditions for the Animation, Like-
ability and Perceived Safety indicators of the God-
speed questionnaire. No significant differences were
found for the Anthropomorphism and Perceived Intel-
ligence scales. It means that the interactions involv-
ing speaking or expressing emotions we used during
the experiment influenced the perception of the an-
imation, likeability and perceived safety but did not
influence the way the robot’s is anthropomorphized
by the participants or how intelligent it seems to be.
It then seems that the anthropomorphic characteristics
attributed to our robot are mainly due to its physical
form, that stay the same in all conditions, and it could
explain why we did not detect any variations for the
Anthropomorphism scale. In the same way, we can
guess that the perceived intelligence is directly tied to
the material delivered by the robot in the experiment
and no variations were detected on the Perceived In-
telligence because that material remains identical in
the three conditions.
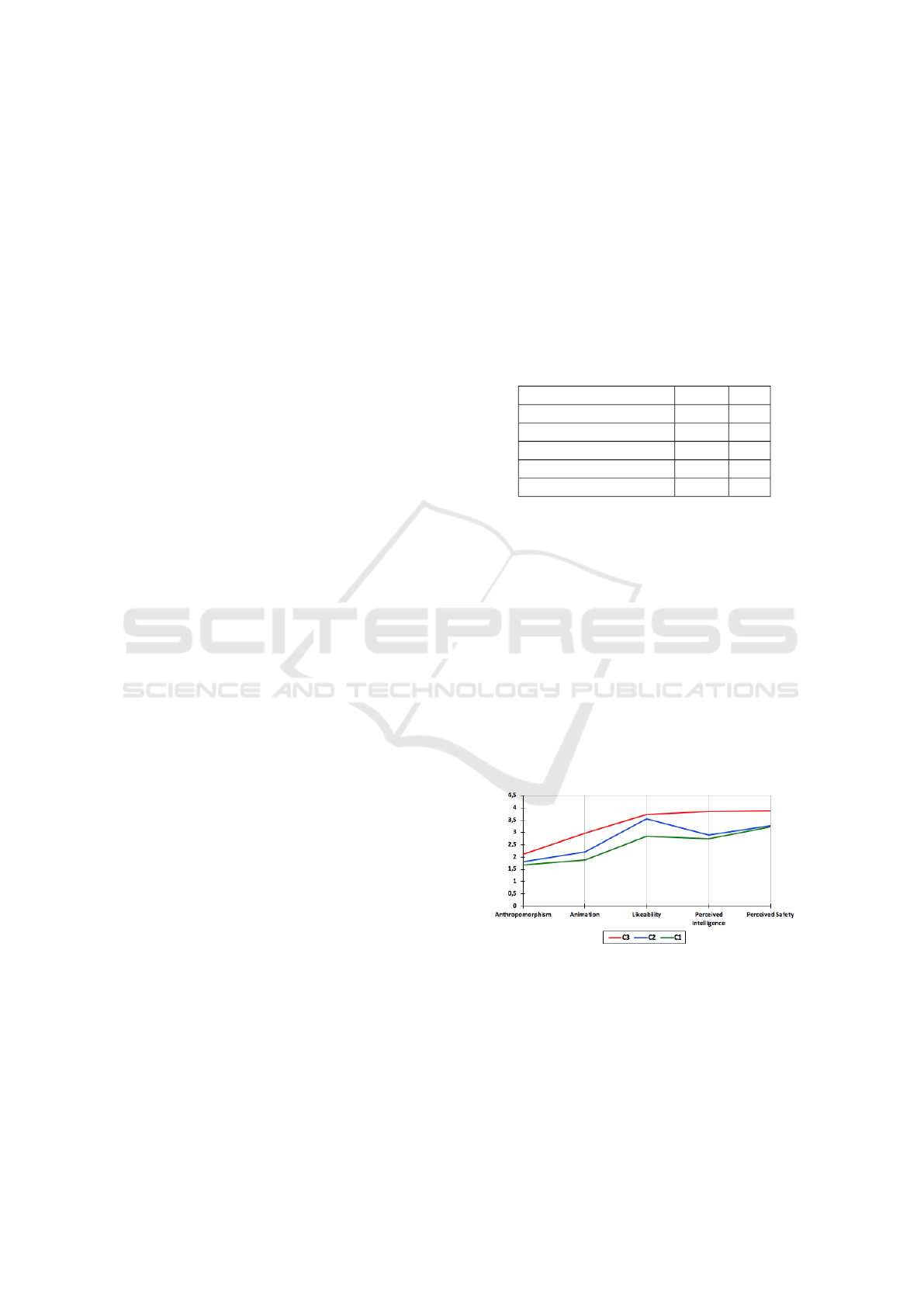
Table 1: p-value and significance of the ANOVA test (p <
0.05) for the Godspeed questionnaire.
Variable p Sig
Anthropomorphism 0.308 No
Animation 0.010 Yes
Likeability 0.024 Yes
Perceived Intelligence 0.075 No
Perceived Safety 0.040 Yes
The mean scores (see Figure 2) for the condition C3
are higher than those for condition C2 on the An-
imation, Likeability and Perceived Safety variables,
meaning that the participants like the robot better and
have the perception of a better animation and safety
when the robot uses facial expressions when it speaks.
Similar results are observed when the robot speaks
(conditions C2 and C3) rather than when it only dis-
plays text on its screen (condition C1). Our hypothe-
sis is thus partially validated for the animation, like-
ability and perceived safety criteria. Participants have
a better perception of these characteristics when the
robot gives them instructions vocally with facial ex-
pressions rather than with voice or text only.
Figure 2: Mean scores of the Godspeed questionnaire in the
three conditions.
3.1.2 AttrakDiff Questionnaire
As shown on Table 2, significant differences exists be-
tween the three conditions for the Pragmatic Quality
and Attractiveness scales of the AttrakDiff question-
naire. No significant differences were found for the
CSEDU 2019 - 11th International Conference on Computer Supported Education
552

hedonic variables, meaning that using the robot was
perceived as equally pleasant in all three conditions.
Table 2: p-value and significance of the ANOVA test (p <
0.05) for the AttrakDiff questionnaire.
Variable p Sig
Pragmatic Quality 0.020 Yes
Hedonic Quality Stimulation 0.243 No
Hedonic Quality Identification 0.137 No
Attractiveness 0.038 Yes
The data presented on Figure 3 show that the mean
scores for the condition C3 are higher than those for
condition C2 for the Pragmatic Quality and Attrac-
tiveness variables. The mean scores are also higher
for condition C2 than for condition C1 for the two
variables.
This means that the participants find the robot to
be significantly more usable and more attractive when
it gives them instructions vocally with facial expres-
sions rather than with voice or text only.
We can confirm that our hypothesis is partially
validated for the Pragmatic Quality and Attractive-
ness variables.
Figure 3: Mean scores of the AttrakDiff questionnaire in the
three conditions.
3.2 Open-ended Questions
3.2.1 Statements About the Experiment
Table 3 presents the results of the thematic analysis
that was performed on the participant’s answers to the
open-ended questions. 76 different items were iden-
tified and distributed into 11 themes. The different
items are equally distributed between conditions C1,
C2 and C3 (respectively 26, 22, 28). The most rep-
resented themes in those 76 items are the feedback
(20), the voice (20), the movement (11) and the inter-
actions (10). Items are equally distributed in our three
conditions for each of those themes.
Items related to feedback are similar throughout
our three conditions. Participants want the cognitive
Table 3: Themes identified in the open-ended questions an-
swers.
Theme C1 C2 C3 All
Feedback 7 5 8 20
Voice 9 4 7 20
Movement 4 3 4 11
Interaction 2 3 5 10
User emotion 3 1 1 5
Material/content 0 2 0 2
Class dynamism 0 2 0 2
Robot emotion 0 0 2 2
Naturalness 0 2 0 2
Ease of use 1 0 0 1
Presence 0 0 1 0
All 26 22 28 76
abilities of the robot to be more developed so that it
could be able to guide them, answer questions or pro-
vide custom explanations.
Expectations formulated regarding the voice are
different when they come from participants of condi-
tion C1 or from participants of conditions C2 and C3.
The C1 participants express their regret that the robot
does not speak and that it is not possible to interact vo-
cally with it. The C2 and C3 participants would also
like to interact vocally with the robot but they wish
for a voice more ”realistic, natural, pleasant” and less
”robotic” as well.
When considering the movement theme, we can
note that the items express the same ideas in all con-
ditions. Participants would like for the robot to pro-
duce head movements or moves in order to make the
class more dynamic but also to intervene in the dis-
cussion, to address a student in particular and to be
more ”present”.
Items associated to the interaction theme were
mainly proposed by participants of condition C3.
They think specific interactions such as the blinking
of the robot’s eyes are interesting and regret that there
is not more of those.
Items related to the user emotion theme are mostly
positive. Participants of all conditions indicated that
they appreciated this type of learning activity that is
fun and new. Participants of conditions C2 and C3
even pointed out that the class was more dynamic
when conducted this way, however they think that
more content should be provided.
Finally, only C2 and C3 participants expressed
some expectations regarding the anthropomorphiza-
tion of the robot, asking for more emotion, presence
and naturalness from the robot.
Social Robots in Collaborative Learning: Consequences of the Design on Students’ Perception
553
3.2.2 Are Students Ready to Welcome Social
Robots in Class?
As stated in Section 2.4, the answers given by the par-
ticipants to the question Q2 were classified in three
categories: ”Yes”, ”No” and ”Yes, if improvements”.
The answers qualified as ”Yes” or ”No” were
clearly positive or negative such as ”Yes, absolutely
(saving time rather than calling the teacher)” or ”No,
because it may not be able to answer to my questions
(...)”.
In the third category, ”Yes, if improvements” we
find answers that were potentially accepting, under
the condition that improvements were made on the
robot. An example of answers classified in this cat-
egory is ”No, having to read on a screen makes it as
interesting a chat bot on a computer. However, if it
was more ”interactive”, why not!”.
Table 4: Distribution of the answers into the three categories
for each condition.
Category C1 C2 C3 All
Yes 1 2 0 3
Yes (improv.) 2 2 1 5
No 3 2 5 10
All 6 6 6 18
The Table 4 presents the distribution of the answers
into the three categories. We can count 8 positive an-
swers (”Yes” and ”Yes, if improvements”) out of 18
and 10 negative answers (”No”). With those numbers,
it is difficult to discern a tendency from the partic-
ipants to accept or reject the use of robots in class,
even if the scale tips a little on the negative side.
Arguments in favor of the use of robots in class
were that it could be interesting to use it to help the
teacher. A participant said that using the robot could
save time rather than calling the teacher. It also could
make the class more dynamic, be motivating and fi-
nally, a participant even mentioned that adding the
robot was like adding a nice person to the group.
Overall, it seems that the robot could make the learn-
ing more enjoyable.
When examining the arguments against the use of
the robot in class, it appears that the reason for reject-
ing the use of this technology in class could be that
the robot is not sophisticated enough. Indeed, several
participants point out that the robot is not interactive
enough to be used in class, that its voice is unpleasant
or that the robot is useless if it is only used to display
text. Others express doubts about the robot’s abilities
to answer questions, explain things and illustrate its
explanations with examples taken from personal ex-
perience. The robot was also perceived as difficult to
use or as a potential waste of time.
4 DISCUSSION
4.1 Threats to Validity
Although our study seems to yield interesting results
and partially validates our hypothesis, it is important
to note that our sample was rather small and consti-
tuted mostly of engineering school students. The lack
of participants and diversity among them means that
the results obtained are deeply bound to the context of
the experiment and may not be generalizable as such.
In order to confirm the insights yielded by our exper-
iment, it is essential to conduct future studies with a
greater number and variety of students.
4.2 Acceptability of the Robot in the
Classroom
When counting the negative and positive answers
given by the participants in question Q2, we noted that
we got slightly more ”no” than ”yes” or ”yes, if im-
provement”. In the same way, the results of the ques-
tionnaires showed that anthropomorphism and ani-
mation (with respective average values of 1.86/5 and
2.36/5) were considered insufficient by the partici-
pants. In the Attrakdiff questionnaire, the low val-
ues of Hedonic Qualities of stimulation (HQ-S) show
that the robot should be better used to support stimula-
tion. The negative values of the Hedonic Qualities of
identification (HQ-I) indicate that the participants de-
velop no identification with the robot or the situation.
Moreover, in the majority of the negative answers, the
participants state that they would not use the robot in
class because the robot is not interactive or intelligent
enough to be useful for learning purpose. The condi-
tions expressed in the ”Yes, if improvement” answers
referred to the same arguments. This could led us to
believe that most participants do not wish to use social
robots in the classroom.
However, we can also note that the values of
the likeability, perceived intelligence and perceived
safety indicators are quite good (with respectively
3.38, 3.17 and 3.46/5). They show that the robot is
well perceived. Similarly, the attractiveness is greater
than 1 (1.43 for C2 and 1.50 for C3) as soon as the
robot speaks. Pragmatic qualities are also greater than
1 (1.29 for C3) as soon as the robot expresses emo-
tions. This means that it is considered pleasant, but
also clear, controllable, effective and practical. The
low values of hedonic qualities show that the design is
CSEDU 2019 - 11th International Conference on Computer Supported Education
554

not refined enough for learning purpose. Comparative
analysis between conditions C1, C2 and C3 showed
that the more the robot’s own features were devel-
oped, the more positive the experience was.
These results let us think that the behavior of the
robot used for the experiment was too basic: the robot
was only pronouncing or displaying instructions for
a sequential task according to participants’ progress.
Experimentation did not involve robot mobility or
customization of answers. Furthermore, the experi-
ment did not include voice control.
Our belief is that if we were able to make the
robot more intelligent, more interactive or if it was
perceived as such by the students, even in the long
run, most of them will agree to use it in class.
The following section provides the improvements
that appear to be the most critical.
4.3 Improving the Robot
The most critical aspects to improve are features that
promote hedonic qualities of identification and stim-
ulation. These are the lowest, and for some of them
negative, values of AttrakDiff. In addition, they will
enable users to achieve the be-goals more satisfacto-
rily, that is to say to find reasons why they will con-
tinue to find the robot interesting and stimulating for
their own development. This aspect is fundamental
in education. To implement these qualities, it will be
necessary to maintain a high level of animation and
interactivity to meet the expectations of the partici-
pants. Intelligence expectations are also very high.
4.3.1 Working on Hedonic Qualities of
Stimulation
The HQ-S can be strengthened by features that make
the robot original, creative and captivating. The an-
thropomorphic characteristics can be used to design
interactions using the voice, the movements or the
emotions that serve this objective.
Participants suggested improvements such as
making the robot able to nod, move or address a spe-
cific person in the group. They suggested also to make
the robot more natural, expressive, dynamic and en-
thusiastic. Very concrete suggestions on the matter
were also provided, such as slow down the blinking
animation to make it look more natural and to make
the robot follow the users with its eyes.
4.3.2 Working on Hedonic Qualities of
Identification
The HQ-I are stimulated by personalized interactions
that reinforce the professional/realistic aspects of the
situation or the link with others.
Individual feedback functionalities can serve this
purpose by stimulating access to appropriate informa-
tion or content, assessment of activities or advice for
task completion. Some participants proposed to make
the robot more intelligent, for example by providing
more instructions, talking more, making the students
able to understand the mistakes they made and help
them. It was also suggested that the robot ask them
questions about their progress in the task. The robot
could also be able to take initiatives and intervene in
the users’ discussion, directly by arguing on the con-
tent or by calling a specific student by his first name.
In a more general way, it could also be interesting
to use the robot as a mediator in collaborative learn-
ing activities. For example, the robot could analyze
students’ work time or participation in order to regu-
late the collective work. It could play a specific role
in a project or game learning situation and follow an
adaptive scenario to improve learners’ immersion and
motivation.
This experiment is a first step towards the intro-
duction of new tools, the social robots, in learning sit-
uations and the emergence of new ways of teaching
with technology.
5 CONCLUSION
This paper analyses the students’ point of view on in-
troducing social robots in collaborative learning envi-
ronments.
The use of social robots in education is growing
as it appears that they could add a social dimension
that enhances learning. Some experiments have been
engaged but the interactions used, especially the com-
munication between the human and the robot, are not
considered as natural and interactive enough. More-
over, the use of social robots may cause privacy and
acceptance problems.
The aim of this paper is, on one hand, to test the
influence of specific ways of interaction on the stu-
dents’ perception of a social robot. Our hypothesis
is that the participants do have a better perception of
the robot when it gives them instructions vocally with
facial expressions rather than with voice or text only.
On the other hand, we aim to identify student’s ac-
ceptability criteria of a social robot in class in order
to help the design of future learning situations.
We presented the results of a comparative study
conducted with potential users interacting with the
social robot Ijini in a collaborative problem solving
learning situation, using different ways of communi-
cation for the robot.
Social Robots in Collaborative Learning: Consequences of the Design on Students’ Perception
555

The experimentation shows that significant differ-
ences where found on five variables: animation, like-
ability, attractiveness, safety and usability. No signif-
icant differences were found on anthropomorphism,
perceived intelligence and hedonic quality.
The analysis of the participants’ recommendations
shows that they can potentially accept social robots in
the classroom if we come up with a better design. The
major improvements to be made are to support he-
donic qualities of identification and stimulation. The
stimulation goal could be achieved by using anthropo-
morphic characteristics such as voice, movement and
expression of emotion in order to make the robot more
interactive. The identification goal could be achieved
with the intelligence and animation characteristics of
the robot. They can be used to provide the students
with personalized feedback or to play an adaptive role
in collaborative situations.
In the next steps of our work we will implement
the discovered critical improvements and conduct a
new and larger study to confirm the insights that were
exposed in this work. This next study will also pro-
vide us with the opportunity to explore the idea to use
the social robot as a regulating tool for collaborative
learning activities.
REFERENCES
Bartneck, C., Croft, E., and Kulic, D. (2009). Measurement
instruments for the anthropomorphism, animacy, like-
ability, perceived intelligence, and perceived safety
of robots. International Journal of Social Robotics,
1(1):71–81.
Braun, V. and Clarke, V. (2006). Using thematic analysis in
psychology. Qualitative research in psychology, 3:77–
101.
Breazeal, C. (2003). Toward sociable robots. Robotics and
Autonomous Systems, 42(3):167–175.
Church, W. J., Ford, T., Perova, N., and Rogers, C. (2010).
Physics with robotics - using lego mindstorms in high
school education. In AAAI Spring Symposium: Edu-
cational Robotics and Beyond.
Dillenbourg, P. (1999). What do you mean by collaborative
learning? Oxford: Elsevier.
Hassenzahl, M., Burmester, M., and Koller, F. (2003).
AttrakDiff: Ein Fragebogen zur Messung
wahrgenommener hedonischer und pragmatis-
cher Qualit
¨
at, pages 187–196. Vieweg+Teubner
Verlag, Wiesbaden.
Jermann, P., Soller, A., and Lesgold, A. (2004). Computer
software support for collaborative learning.
Kelley, J. F. (1984). An iterative design methodology for
user-friendly natural language office information ap-
plications. ACM Trans. Inf. Syst., 2(1):26–41.
Kennedy, J., Baxter, P., and Belpaeme, T. (2017). Nonverbal
immediacy as a characterisation of social behaviour
for human–robot interaction. International Journal of
Social Robotics, 9(1):109–128.
Kennedy, J., Lemaignan, S., and Belpaeme, T. (2016). The
cautious attitude of teachers towards social robots in
schools. In Proceedings of the 21th IEEE Interna-
tional Symposium in Robot and Human Interactive
Communication, Workshop on Robots for Learning.
Laal, M. and Ghodsi, S. M. (2012). Benefits of collaborative
learning. Procedia - Social and Behavioral Sciences,
31:486–490.
Lallemand, C., Koenig, V., Gronier, G., and Martin, R.
(2015). Cr
´
eation et validation d’une version franc¸aise
du questionnaire attrakdiff pour l’
´
evaluation de
l’exp
´
erience utilisateur des syst
`
emes interactifs. Re-
vue Europ
´
eenne de Psychologie Appliqu
´
ee/European
Review of Applied Psychology, 65(5):239 – 252.
Mitnik, R., Nussbaum, M., and Soto, A. (2008). An au-
tonomous educational mobile robot mediator. Au-
tonomous Robots, 25(4):367–382.
Mubin, O., Stevens, C. J., Shahid, S., Al Mahmud, A., and
Dong, J.-J. (2013). A review of the applicability of
robots in education. Journal of Technology in Educa-
tion and Learning, 1:209–0015.
Saerbeck, M., Schut, T., Bartneck, C., and Janse, M. D.
(2010). Expressive robots in education: varying the
degree of social supportive behavior of a robotic tu-
tor. In Proceedings of the SIGCHI Conference on
Human Factors in Computing Systems, pages 1613–
1622. ACM.
Sharkey, A. J. C. (2016). Should we welcome robot teach-
ers? Ethics and Information Technology, 18(4):283–
297.
Short, E. and Mataric, M. (2015). Multi-party socially as-
sistive robotics: Defining the moderator role.
Short, E. and Mataric, M. J. (2017). Robot moderation
of a collaborative game: Towards socially assistive
robotics in group interactions. In 2017 26th IEEE In-
ternational Symposium on Robot and Human Interac-
tive Communication (RO-MAN).
Strohkorb, S., Fukuto, E., Warren, N., Taylor, C., Berry, B.,
and Scassellati, B. (2016). Improving human-human
collaboration between children with a social robot. In
Robot and Human Interactive Communication (RO-
MAN), 2016 25th IEEE International Symposium on,
pages 551–556. IEEE.
Tanaka, F., Takahashi, T., Matsuzoe, S., Tazawa, N., and
Morita, M. (2014). Telepresence robot helps children
in communicating with teachers who speak a different
language. In Proceedings of the 2014 ACM/IEEE In-
ternational Conference on Human-robot Interaction,
pages 399–406. ACM Press.
CSEDU 2019 - 11th International Conference on Computer Supported Education
556
