
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes
Paul Seymer
1
, Duminda Wijesekera
2
and Cing-Dao Kan
2
1
Radio and RADAR Engineering Laboratory, George Mason University, Fairfax, VA 22030, U.S.A.
2
Center for Collision Safety and Analysis, George Mason University, Fairfax, VA 22030, U.S.A.
Keywords:
Smart Parking, Bluetooth, Mesh Networking.
Abstract:
Contemporary parking solutions are often limited by the need for complex sensor infrastructures to perform
space occupancy detection, and costly to maintain ingress and egress parking systems. For outdoor lots, net-
work infrastructure and computational requirements often limit the availability of innovative technology. We
propose the use of Bluetooth Low Energy (BLE) beacon technology and low power sensor nodes, coupled
with sensible placement of computational support and data storage near to the sensor network (a Fog comput-
ing paradigm) to provide a seamless parking solution capable of providing parking maintainers with accurate
determinations of where vehicles are parked within the lot. Our solution is easy to install, easy to maintain,
and does require significant alterations to the existing parking structures.
1 INTRODUCTION
Modern smart parking solutions have many prob-
lems. First, many suffer from the need to install per-
space sensors to provide accurate occupancy detec-
tion. Others require too much user interaction, such
as using smartphone apps to scan space identifiers.
Other solutions use isolated ingress and egress pay-
ment interaction points, entailing costly automation.
While the original intent of technology deployments
to parking lots was to make management cost effec-
tive and usable, contemporary commercial solutions
continue to use old paradigms and fail to achieve
seamless, low cost, low resource intensive but service
rich parking management solutions.
Parking lots, particularly outdoors often reside
outside wireless (or even wired) network boundaries.
Additionally, these spaces have minimal power to
support lighting and other basic infrastructure. Sug-
gesting a complicated technology stack for deploy-
ment to these lots will replace one problem with an-
other and become cost prohibitive. Shifting to cloud
computing technology offer the ability to take advan-
tage of high computational ability without the over-
head and expense of maintaining it, nor paying for
its use when idle. One major drawback of this tech-
nology is the dependence on a reliable, and often
large, network connection, a rarity in parking lots.
Fog computing, counters such dependencies by shift-
ing computation and storage closer to the parts of a
network that need them. In the case of sensor net-
works, like the ones that are deployed to smart park-
ing lots for occupancy detection, Fog computing sug-
gests that storage and computational capability be lo-
cated as close to the network’s sensor capability as
possible. This is a challenge, as the devices that per-
form sensor activities are often low power, and as a re-
sult have extremely limited storage and computational
capability. What is needed is a low cost, low power
solution with minimal user interaction to function.
Doing so requires eliminating traditional ingress and
egress payment and tracking support and replacing it
with something completely seamless that does not in-
terfere with vehicle ingress or egress or to/from the
lot. Occupancy detection must not have a one-sensor-
per-space requirement. Deployment of the solution
should not require significant alteration of the exist-
ing lot. We suggests using low cost, low power, Blue-
tooth Low Energy (BLE) sensors and BLE beacon
technology to create a fully automated and seamless
parking experience. In this paper, we improve upon
our prior work (Seymer et al., 2019) in several ways:
Improved localization, simplified machine learning
model (smaller feature vector), significantly lower
mesh network overhead during operation, and adapta-
tion of Fog/Cloud concepts to provide on-demand and
off-network computation (simplifying on-lot compu-
tation demand). We compare this to a solution that
use an Edge Computing object recognition camera as
a BLE vehicle attestation to our solution.
Seymer, P., Wijesekera, D. and Kan, C.
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes.
DOI: 10.5220/0007734802110222
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 211-222
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
211
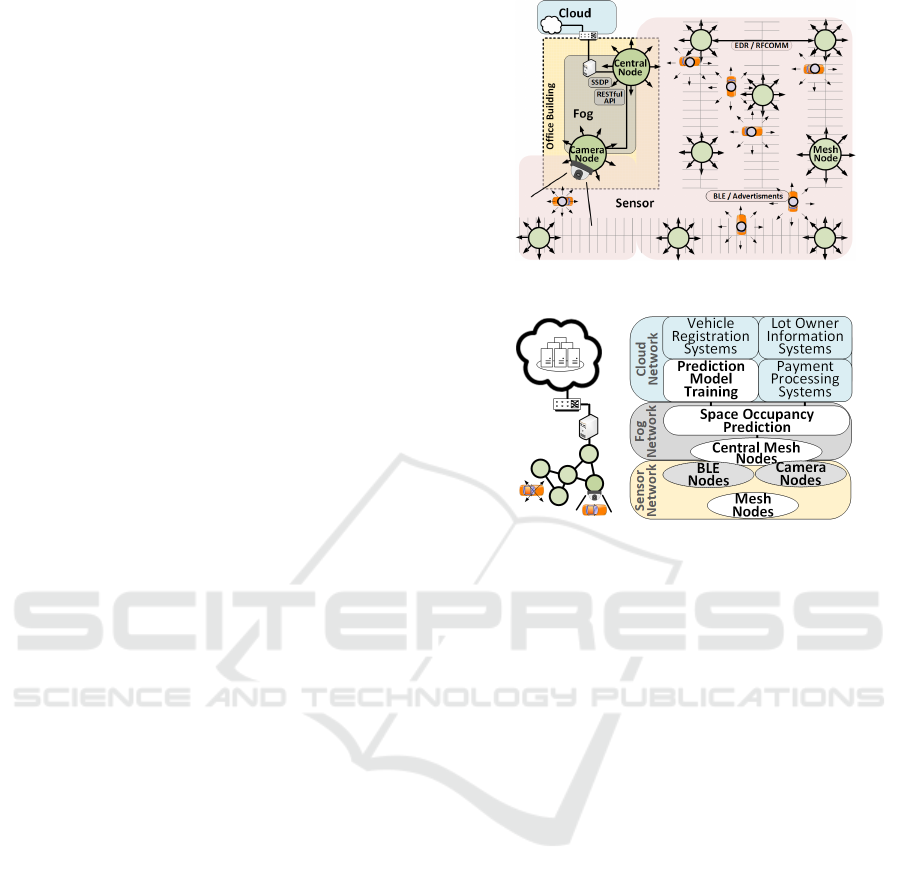
2 PROPOSED SOLUTION
An overview of our solution is shown in Figure 1
where the target parking lot is equipped with Blue-
tooth sensor nodes that measure radio strength from
vehicles equipped with BLE beacons. These sensor
nodes form an authenticated mesh network, based off
of real-time radio signal strength between them to al-
low the network to self-form and adapt to changing
conditions like interference or node failure. When
vehicles enter the lot and park, the sensor network
records Received Signal Strength Indicator (RSSI)
values and relays these values over Bluetooth Clas-
sic (RFCOMM connections) to a central node. This
central node assembles the sensor data together and
performs a space prediction activity using a Random
Forest machine learning model, trained against a ra-
dio map created at installation time. This model was
trained offline to simulate an activity we see as occur-
ring in a real-life deployment in the cloud, however
the size of our parking lot and the low-density of sen-
sor nodes is such that training this model could have
been performed on a host within the fog network. Our
solution takes advantage of edge computing and fog
computing by configuring the sensor nodes with sam-
ple rates and other data pre-processing steps aimed at
reducing network demand, performing execution of
the space prediction activity on a power unrestricted
fog network located within a nearby office building,
and offloading lot-agnostic or global activities such as
trending and payment processing to the cloud. Here,
all computations needed to make a space determina-
tion is located on the fog network, sparing the connec-
tion to the cloud from this additional demand. Exter-
nal services that can benefit from this data can interact
directly with the cloud, sparing the fog and sensor net-
works from supporting those processes. This arrange-
ment is shown in Figure 2. In addition, our system
detects vehicles that enter and exit the lot, and authen-
ticates them. We do so with two solutions, one based
purely on Bluetooth radio, and another that combines
the radio with an object recognizing camera deployed
to an ingress point at the parking lot. We experimen-
tally contrasted both solutions.
2.1 Parking Space Occupancy Detection
Our space occupancy prediction model is an evolu-
tion of prior work (Seymer et al., 2019), where we
used RSSI values from Bluetooth beacons, measured
at multiple locations within a parking lot to train a
Random Forest machine learning classifier. This sec-
tion outlines significant changes and improvements to
that work, and new features provided by our current
Figure 1: Solution Overview.
Figure 2: Cloud, Fog, and Sensor Network Model.
system.
2.1.1 Zone based Occupancy Detection
Preliminary experiments were performed with a per-
space occupancy detection goal. Results were accu-
rate above 90% for our training set for all spaces in
the lot, with less accurate spaces along the south and
south east corners of the lot (marked as orange circles
in Figure 3). Suspecting that this was due to signal
interference in the 2.4GHz range from the surround-
ing residential area, we considered zoned-based oc-
cupancy detection instead of individual spaces as a
mitigation technique, as parking lot owners will most
likely not want a pricing model that differs between
spaces that border one another, except for regions
such as near a building entrance, or on a level of a
parking garage. Consequently, we use zones consist-
ing of contiguous spaces as shown in Figure 3.
2.1.2 Sensor Node Placement
To avoid deploying structures that impede traffic flow
or compromise existing spaces, we used existing lamp
posts to mount nodes at heights of 8 feet or more. Two
sensor nodes are located within the nearby building
that belong to both the BLE sensor network and the
fog network, to act as a network bridge to allow for
sensor data to be used off-network for payment, etc.
(see Figure 3).
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
212
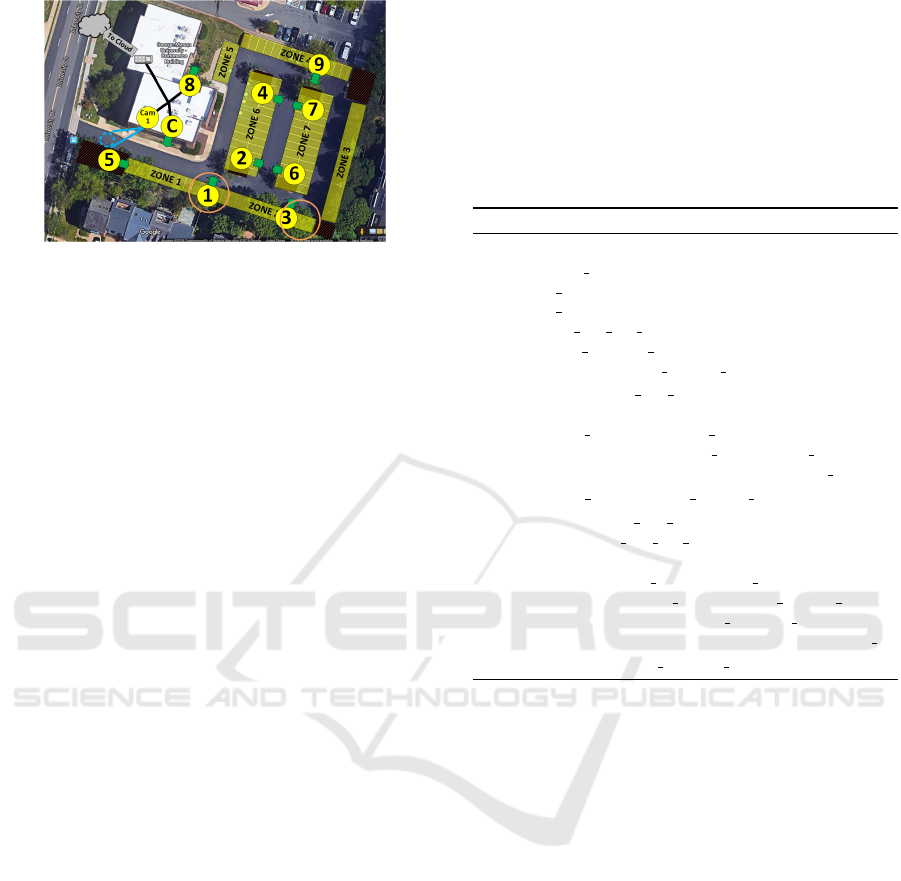
Figure 3: Parking Space Zone Map.
Preliminary experiments in prior work with a 7
node network resulting in mis-classifications primar-
ily involving spaces in zones 2 and 3 in both the train-
ing set and the in-vehicle testing. Additionally, the
formed mesh routed all traffic through node 1, cre-
ating a a single point of failure and a potential bot-
tleneck, should the network become saturated. As a
mitigation, we deployed two additional sensor nodes
to address inaccurate predictions for nearby spaces in
zones 2, 3 and 4, and a third node on the other side of
the building (near node 4, not shown in the figure) to
allow for multiple mesh paths to be formed with the
nodes inside the building.
2.1.3 Radio Fingerprint Feature Selection
Our first features included many statistical measures
of RSSI values and their changes over time. After
consequent analysis, we removed features with min-
imal positive value to the model. An example is the
median count of RSSI beacons seen over discrete time
intervals. In practice, this metric varied greatly once
a beacon was placed inside a vehicle, creating higher
errors in prediction. Such issues are addressed in
Section 3.1.3. Temporary physical obstructions cause
signal attenuation or in some cases prevent a beacon
measurement entirely. To mitigate this effect, we used
the highest observed RSSI value per node per space,
as this gave the best result. Our experiments described
in Section 3 support this choice.
2.1.4 Bluetooth-only Vehicle Identification and
Tracking
Due to the range of Bluetooth, each space is observ-
able from several sensors in our network. When a
vehicle enters the lot and parks, its unique beacon
broadcast will be detected as part of the localization
process. If that beacon has not been seen for a period
of time, we assume that the vehicle has exited the lot.
Our process for vehicle detection and identification
is shown in Algorithm 1. Initialization is run when
the network is started, shown in lines 1-7. This algo-
rithm maintains a data structure of observed beacons
(lines 8-12), launches a thread (line 7) to observe this
data structure (line 16) and determine when a vehicle
has exited the lot (line 18). If an exited vehicle is de-
tected, a notification is sent (line 19) so that external
functions could be run to initiate payment and other
business functions based on lot occupancy.
Algorithm 1: BLE Only Vehicle Identification Procedures.
1: procedure initialize()
2: parked records ← {} init history data structure
3: veh entered ← {} init enter records
4: veh exited ← {} init exit records
5: detect veh kill flag = False
6: beacon measure intvl = 5min
7: start thread detect vehicle exit()
8: procedure detect veh enter(each received beacon b)
called for each beacon central receives
9: if b.veh id not in parked records then
10: create entry for b.veh id in parked records
11: notify mgr new vehicle parked (b.veh id)
12: parked records[b.veh id].last seen ← b.time
13: procedure detect veh exit()
14: while detect veh kill flag = False do
15: n ← time.now()
16: for each veh rec ∈ parked records do
17: r ← parked records[b.veh id].last seen
18: if (n − r) > beacon measure intvl then
19: notify mgr new vehicle exited (b.veh id)
20: sleep (beacon measure intvl)
One potential gap in our solution is the assump-
tion that a beacon found within a lot is indeed inside
a vehicle, and that all vehicle entering the lot have an
active beacon. While our smart parking solution will
only be deployed to lots that have 100% participation
by all vehicles, we are sensitive to the potential for
a malicious vehicle operator entering the lot without
powering their beacon. To our solution, this would
not appear as a space occupying vehicle at all, but we
explore a solution to this in the next section.
2.1.5 Camera-based Vehicle Detection and BLE
Beacon Attestation
To remedy the potential for vehicles to evade detec-
tion by disabling their beacons, we explore the use
of a low cost, low power object recognition camera
located at the entrance/exit points of the lot. We
selected the Jevois-A33 Smart Camera (JeVois Inc,
2018), an all-in-one camera and CPU with a USB in-
terface, chosen primarily due to its low price point
(under $60 USD), and the ability to recognize objects
out-of-the-box with little configuration. We config-
ured the camera to recognize vehicles using the Jevois
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes
213

Darknet YOLO module (Itti, 2018) which employs
YOLOv3 (Redmon and Farhadi, 2018), a neural net-
work that quickly detects objects based on a single
pass across an image obtained from the camera. We
connected the camera using USB to one of our mesh
nodes and we use the camera’s USB interface and
sent serial messages from its classifier to its built-in
logging module. The node connected to the camera
was also equipped with a BLE receiver and observe
nearby beacons and discover if the vehicle viewed by
the camera has a valid active beacon - assuring that the
specific beacon observed does indeed correspond to a
car. While a simple solution, we view this as a prelim-
inary step for augmenting our BLE-only solution with
additional low cost low development attestations. We
conducted feasibility experiments for this implemen-
tation in Section 3.3, and contrast this solution with
the BLE only solution in Section 2.1.4. We outline
how this arrangement functions in Algorithm 2. Algo-
rithm initialization occurs (lines 1-6), creating a data
structure, populated by two watcher threads that ob-
serve and record BLE beacons and camera-based ob-
ject detections. Additionally, two thresholds are set
specifying the RSSI value required by a beacon to in-
dicate it is near to the camera node (line 5), and the
maximum time difference between a camera recogni-
tion event and a matching BLE beacon (line 6). When
a vehicle passes near the camera, it is recognized by
the camera’s object recognition system and logs a de-
tection event through the serial connection to its node.
Additionally, the vehicle’s beacon is observed by the
BLE receiver on the node. As BLE beacon detection
and camera-based object recognition are independent
processes, a step is required (lines 11-14) to match
them based on similar time-stamps defined by our
threshold (line 6). Section 3 experimentally shows
that camera recognition takes a few extra seconds to
process when compared to the BLE detection. This
occurs because the radio broadcast of slow moving
cars reaches the camera node’s BLE sensor before the
vehicle comes into the camera’s view. Once the match
occurs, this attestation event is passed back to the cen-
tral node for use (line 16) or an error is sent if a bea-
con or camera event are missing (line 18). Lastly, our
experiments show that the camera does not function
at night when there is insufficient light to recognize
objects correctly, so this algorithm is only run during
daylight hours (lines 7-8).
2.2 Fogged BLE Sensor Meshnet
Our solution is composed of software-identical nodes,
assigned and configured to a specific roles: mesh
network, sensor, in-vehicle, or camera. Any node
Algorithm 2 : Hybrid BLE/Camera Vehicle Identification
Procedures.
1: procedure initialize
2: Initialize datastructure d
3: Start thread to record BLE beacons
4: Start thread to record events from camera
5: bt ← rssi threshold (set to -70 dBm)
6: td ← event time delay (set to 5 seconds)
7: if is nighttime then
8: Exit, as camera does not function at night
9: procedure attest veh thread(datastructure d)
10: if d has new event e then
11: if e is a new Beacon event b then
12: Find matching Camera event c
13: if e is a new Camera event c then
14: Find matching Beacon event b
15: if both c and b do not exist then
16: Send error (-,b or c,-) to central node
17: else
18: Send attestation (c,b) to central node
can perform any role provided it is equipped with
the necessary hardware, allowing deployment activ-
ities to place sensor nodes where they are needed
for detection, and if needed, turn them into network
nodes at a later time. The mesh network is formed
over Bluetooth Classic (EDR Mode), partially insu-
lating the BLE-based occupancy prediction function-
ality from radio interference. Nodes that must com-
municate inside buildings and to upper network lay-
ers (i.e. Cloud) do so over the building’s existing
wired network to reduce the in-building mesh net-
work density required to compensate for signal atten-
uation from walls and floors. As one of the nodes
on this fog network was the central node, this wired
network formed the basis for the internal boundary of
our fog network. Once we determined which parame-
ters we would use for our space prediction algorithm,
we configured the sensor nodes to sample data and
perform initial processing to reduce network traffic
and computational requirements for the central node.
This configuration at the sensor nodes forms the ex-
ternal boundary of our fog network, as computation
and storage have been pushed out into what would
traditionally be the sensor network, as shown in Fig-
ure 4. We found that the high degree of mesh density
due to clusters of sensor nodes began to compromise
the integrity of the BLE radio, in addition to being
extremely wasteful with a high volume of redundant
message transfers (a characteristic of message flood-
ing). We explore this more in Section 3.2.4. As a re-
sult, we deployed a simple route selection algorithm
to maintain at most one outgoing connection per mesh
node. To support node authentication, the network is
formed from the central authentication authority out-
ward, detailed in Section 2.2.1.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
214
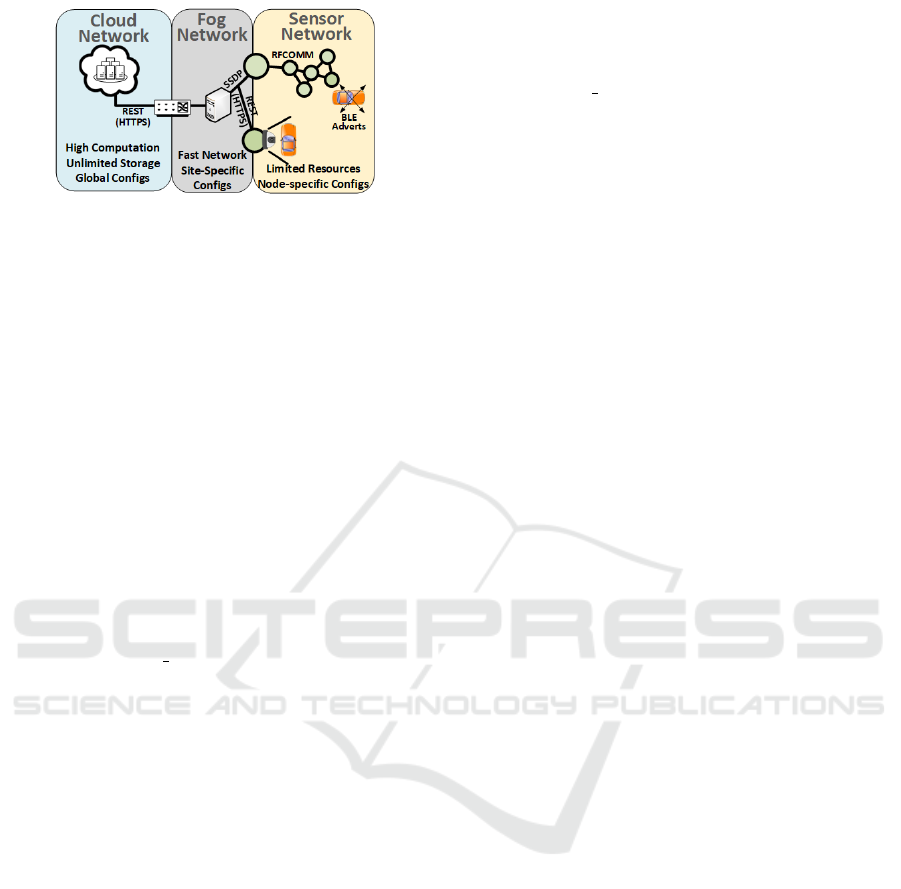
Figure 4: Fogged Network Arrangement.
2.2.1 Self-forming Authenticated Routed Mesh
Each node contains a configuration (using a service
list) that specifies permissions to connect to EDR
(Bluetooth) or Fog (wired Ethernet) networks. Node
discovery and network construction operate differ-
ently for these networks, as each contains different
protocols and independent physical layers. All con-
figured nodes enter a network formation phase upon
boot up and are required to authenticate with the cen-
tral node prior to being allowed to join the network
and send messages. To ensure that a path exists on
the existing network back to the central node to sup-
port authentication, the network is formed outward
from the central node, until every node in the network
has a valid link. Major functions in the network con-
struction process are shown in Algorithm 3. When a
node boots up, join network (line 1) is called, initi-
ating discovery steps for a fog network (lines 2-8) or
Bluetooth mesh network (lines 9-18). Initially, only
the central node advertises its services (both fog and
EDR Bluetooth mesh). Fog network advertisements
use a stripped down SSDP service (Seymer et al.,
2019) implemented in Python using multicast group
address 239.255.255.250, port 1900 (line 3). When
services are found, the new node and the existing net-
worked node are mutually authenticated (lines 5-6,
procedure outlined in lines 19-27) over the networked
node’s RESTful API (lines 21-27). If authentication
is successful, the new node launches its RESTful API
(line 8) written in Python and Flask (over HTTPS
on port 443) to enable bidirectional communication.
For the Bluetooth Mesh network, we use a BLE bea-
con to facilitate node discovery (line 10), rather then
our previously used (Seymer et al., 2019) SDP ser-
vice protocol, as current software support for RSSI
measurements is limited to BLE. For each node dis-
covered (line 11) that has a sufficiently strong signal
(line 12), authentication (line 13, procedure outlined
in lines 18-36) is performed. If authentication is suc-
cessful, node connection information is stored (line
14) so connections can be made in the future to send
messages.
We solve both the central path dependency for au-
thentication and mesh density reduction (Section 3
problems for the Bluetooth based network with the in-
troduction of a simple route generation algorithm (in
procedure join network) for the edr network. Only
nodes with an RSSI value on their advertisements
above -75dBm are considered for authentication. Af-
ter nodes are authenticated, the new node only cre-
ates an outgoing message queue for the node with the
best connection (e.g. the largest RSSI advertisement
value) (lines 15-18). Additional nodes are stored (line
14), in case this node fails so that the network is main-
tained. This forces all nodes to have at most one out-
going message queue, and only send messages to a
single networked node, reducing the overall network
density and creating forward routes for each node.
Experiments that lead us to this design are found in
Section 3. Fog connections are made over Ethernet,
and do not have such a density reduction requirement.
However we assume that the central node is in the
same broadcast domain as all other fog nodes (pre-
venting the central path dependency problem, as ev-
ery node is observable from one another during the
SSDP protocol). We see expansion of robustness for
these solutions as future work.
2.2.2 Reliable Encrypted Message Transfer
Each node pre-exchanges an AES and HMAC keys
with the central node to support message encryp-
tion (AES) and signature based integrity checking
(HMAC-SHA256), stored locally within each node.
Messages are of two main types, authentication mes-
sages and parking system messages. Authentication
messages are used to authenticate new nodes to the
mesh network, and parking system messages support
the camera, BLE space occupancy, and network
housekeeping. Each message follows the same
format (Figure 5) but differs in fields based on the
type of message being sent. This format is limited
to a single AES block size (128 bit), and begins with
a 4 bit field indicating the message type (0000 for
heartbeats, 0001 for BLE RSSI messages, 0010 for
camera object recognition events, 0011 for message
acknowledgements, 0100 for authentication related
messages, and 0101 - 1111 reserved for future use.).
This message type helps to ensure the message is
properly parsed on the receiving end. The next field
is a 16 bit node identifier, indicating which node sent
the message. The remaining 108 bits contain the mes-
sage text being delivered. This entire 128 bit message
is encrypted and signed using the originator’s shared
AES and HMAC keys. This grows the message to
530 bits (Figure 6). When authenticating new nodes
to the network, non-central nodes will need to relay
this message to the central node, and provide it’s own
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes
215

Algorithm 3: RSSI based authenticated meshnet formation.
1: procedure join network
2: if node contains ”fog” service then
3: do SSDP on Ethernet network (for 20 mins)
4: for each fog node fn found do
5: if auth to fog network(fn) then
6: initialize message queues for fn
7: if at least one fog node found then
8: launch RESTful API listener (flask)
9: if node contains ”edr” service then
10: perform BLE scan (for 20 mins)
11: for each advert bn with matching UUID do
12: if bn avg RSSI ≤ -75 dBm then
13: if auth to ble network(bn) then
14: known nodes.append(bn)
15: if at least one node bn found then
16: broadcast BLE advertisements (for 20 mins)
17: gw ← bn with largest RSSI value
18: Initialize message queues for gw
19: procedure auth to fog network(node info fn)
20: this is run by the new node
21: authmsg ← construct authentication message
22: Open RESTful HTTPS connection to fn
23: POST authmsg
24: authreply ← HTTP reply from POST
25: if authreply is valid then
26: return True
27: return False
28: procedure auth to ble network(node info bn)
29: this is run by the new node
30: authmsg ← construct authentication message
31: Open RFCOMM connection to bn
32: Send authmsg
33: authreply ← Receive from bn
34: if authreply is valid then
35: return True
36: return False
encryption and signing to ensure secure message de-
livery. This additional pair of operations grows these
messages to 802 bits (Figure 7). To assist the cen-
tral node in choosing the appropriate keys when vali-
dating encrypted and signed message, these message
types are pre-pended with a plaintext node ID cor-
responding to the correct key identifier in its key-
store (known to each node). Additionally, to assist
with routing without requiring each node to set up its
own inter-node channels, these message are also pre-
pended with a 2 bit mode identifier, indicating if the
message is for the central node, or for one of the sen-
sor/relay nodes. Each of these pre-pended fields is
included in the inputs to the signature hash function.
While these fields make each message slightly larger,
the use of these shortcuts greatly improved ease of
message handling and routing implementation, and
reduces encryption/decryption related computational
demand on the low-power sensor nodes. Parking sys-
tem messages are always routed to the central node.
4 bits
msg type
16 bits
node id
108 bits
payload
Figure 5: 128 bit Message (plaintext).
2 bits
mode
16 bits
node id
128 bits
Ciphertext
128 bits
IV
256 bits
Signature
Figure 6: 530 bit Encrypted and Signed Message.
2 bit
mode
16 bit
node id 1
128 bit
ciphertext
128 bit
IV
256 bit
sig. 1
16 bit
node id 2
256 bit
sig. 2
Figure 7: 802 bit Relayed Node Auth Message (encrypted).
When a valid message is sent to the central node, an
encrypted and signed reply message is sent back to
the originating node, containing an identical sequence
number for the original message. If a node does not
receive an acknowledgement within a timeout period,
it resubmits the same message. This arrangement ef-
fectively doubles the message load on the network,
and we leave optimization of this to future work.
3 EXPERIMENTS
Our experimental platform consists entirely of Rasp-
berry Pi 3s, running Ubuntu Mate. Due to per-
formance problems in using Pi’s built-in Bluetooth
adapter in dual-mode, we replaced it with an after
market Bluetooth USB dongle StarTech (StarTech,
2018) to regain expected Bluetooth performance.
Our code is written in Python using the pybluez
library (karulis, 2018) and Bluez Linux Bluetooth
stack (Holtmann and Hedberg, 2018). For our local-
ization experiments, we constructed several datasets
for training and testing. Initial space fingerprint-
ing used a tripod mounted beacon (at the approxi-
mate height of a vehicle’s rear view mirror) to cre-
ate vehicle model independent fingerprints, but later
found that attenuation difference when the beacon
was placed in a car resulted in a poor prediction
model. We show these results in Section 3.1 and dis-
cuss our study of in-vehicle attenuation more thor-
oughly in Section 3.1.3. The complete lot was re-
fingerprinted with the beacon inside a Nissan 370Z
(370 o dataset). Additional vehicles (Nissan 350Z,
Acura TL, and Nissan Rogue) were used to make
partial-lot test datasets collected locally at each node,
and over the mesh network. We refer to data collected
from nodes and transmitted over the mesh network to
the central node, as mesh datasets, and confined the
size of the dataset to randomly selected spaces from
each zone. To study the effects of the mesh network
on localization, we also constructed datasets collected
directly at each node (offline, after the experiment) in
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
216

the absence of the mesh network. We refer to these
as offline datasets. These datasets are summarized
in Table 1, with sample rates explained later in Sec-
tion 3.2.3. set1 spaces include 8, 20, 25, 27, 34, 36,
44, 53, 58, 64, 75, and 83. set2 spaces includes 25,
27, 29, 34, 36, 38, 39, 56, 58, 60, 62, 64, 67, 70, 71,
75-77, 79-81, and 87-89. set3 includes 1-2, 4, 6, 10-
13, 18, 20, 24, 31-33, 35, 37, 39-45, 49-50, 53-55,
64, 66, 68, 72, 75, 77-78, 80, 82, and 90. set4 spaces
includes 25, 27, 29, 34, 36, 56, 58, 60, 71, 72, and
75-76.
Table 1: Dataset Space Composition (of 90 total spaces).
Name Source Spaces Collect Rate
Tripod Tripod all but 84-88 Offline Constant
350 o 350Z set2 Offline Constant
370 o 370Z all (1-90) Offline Constant
TL o Acura set3 Offline Constant
350 m1 350Z set4 Mesh Constant
350 m2 350Z set1 Mesh Constant
350 m3 350Z set1 Mesh 60s sample
370 m 370Z set1 Mesh 60s sample
Rogue m Rogue set1 Mesh 60s sample
Prior experiments used the entire target parking
lot (Seymer et al., 2019). Our current experiments
removed Zone 3 (see Figure 3) due to un-relocatable
physical obstacles in those spaces. We also sought the
opportunity to deploy additional beacons compared to
past work, allowing us to study the effect of additional
RSSI datapoints on prediction accuracy, described in
the next section.
3.1 Improved Prediction Model
In prior work we found that a Random Forest algo-
rithm produced the most accurate predictions com-
pared to similar classifiers, and we continue to use
that algorithm in this work. However we made sev-
eral improvements to our model based on what we
learned in our experiments. We outline each of these
improvements, along with our reasoning, in this sub-
section.
3.1.1 Initial Improvements to Model and
Feature-set
We reduced our feature-set after experiments deter-
mined that only the maximum RSSI value within a
time window consistently produced accurate results.
This resulted in our feature vector shrinking from 38
in prior work, to 10 total features per time interval.
After taking RSSI measurements for each space in the
lot, we constructed a random forest model based on
these 10 features, and summarize results in Table 2.
Here we see three models trained with the tripod (tri)
dataset, and used with TL o, 350 o, and 370 o in-
vehicle datasets. Columns TP and R show True Posi-
tive percentage and ROC area, respectively. The first
model is a Random Forest model with default settings
(no random tie breakers, iteration total of 100), with
optimized models that are configured to randomly se-
lected ties found by the algorithm, with total itera-
tions set to 1000 and 1500 (respectively). All models
use 10-fold cross-validation (CV). We use this same
model evaluation and tuning strategy throughout this
work, so that we can study the effect of model tuning
on prediction accuracy. The results of this experiment
show that while the model evaluates to 100% accu-
racy (in the second optimized case), it is only suc-
cessful at predicting other vehicles’ space occupancy
by between approximately 8% and 14%, decreasing
with our model optimization strategy. This is similar
to the results from our prior experiments, and clearly
requires improvement to make this a viable solution,
even after introducing additional sensor nodes as we
have done in this work.
Table 2: Initial Per-Space Tripod (tri) Model Results.
Model
Default Optimized 1 Optimized 2
(Dataset) TP R TP R TP R
tri 99.88% 1 99.96% 1 100.0% 1
tri(TL o) 11.23% 0.80 10.96% 0.87 10.44% 0.87
tri(350 o) 8.94% 0.79 8.94% 0.80 8.18% 0.83
tri(370 o) 14.05% 0.74 10.99% 0.81 10.91% 0.82
3.1.2 Zone based Occupancy Detection
After closely analyzing the specific error cases in our
last experiment, we surmised that we could improve
our solution accuracy if we migrated from a per-space
to a zoned based space occupancy strategy. In this
case, the parking provider cares more about the area
of the lot a vehicle is in than the individual space. In
theory, this should improve our results in cases where
the predicted space is near the true space. Using the
same data, we divided up the lot into zones as de-
fined in Section 2.1.1, and re-labeled our dataset ac-
cordingly and trained a new zone-based model. Our
results are shown in Table 3. While this significantly
improved the results, for some vehicles there was little
improvement, and overall still below acceptable accu-
racy.
3.1.3 In-vehicle Effects on Beacon Attenuation
After re-examining our testing results, we noticed that
there was an inconsistent decrease in RSSI values
when comparing the tripod’s signature with the in-
vehicle signature. When the beacon is located on a
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes
217
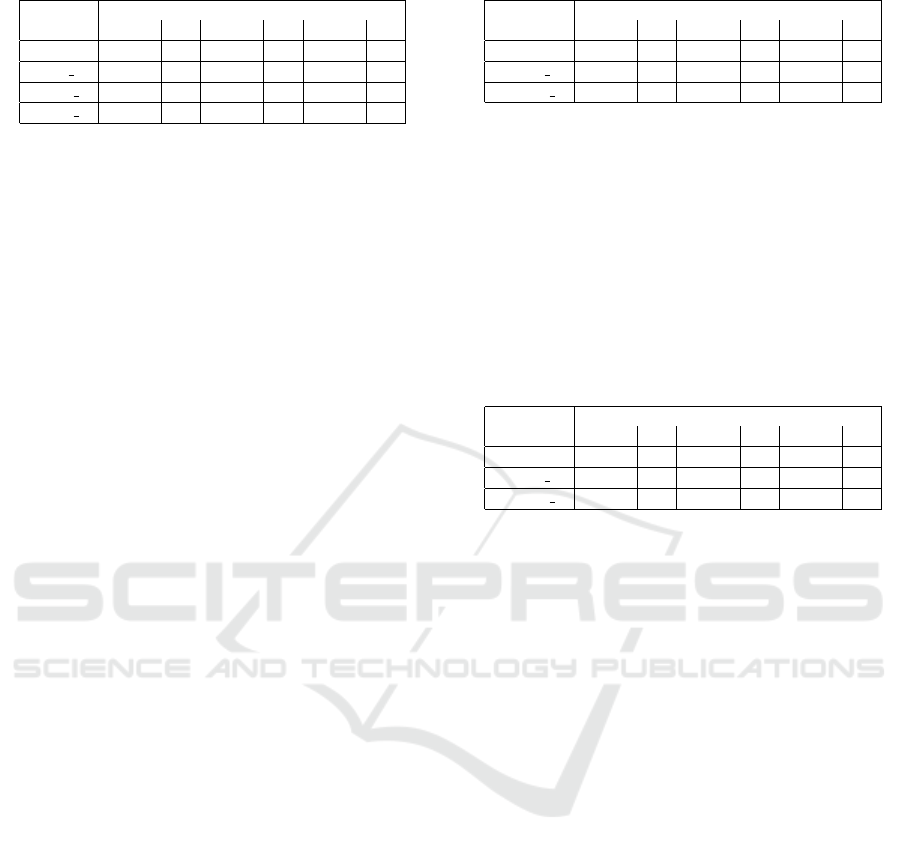
Table 3: Initial Zone Based Tripod (tri) Model Results.
Model
Default Optimized 1 Optimized 2
(Dataset) TP R TP R TP R
tri 99.68% 1 99.68% 1 99.68% 1
tri(TL o) 42.46% 0.83 38.77% 0.83 38.95% 0.82
tri(350 o) 16.06% 0.71 18.33% 0.77 18.48% 0.77
tri(370 o) 43.33% 0.81 43.93% 0.82 43.93% 0.82
tripod, it physically approximates the location of the
beacon if it were mounted in a vehicle, however the
effect of the vehicle’s surrounding structure appeared
to differ depending on the direction of the vehicle’s
orientation with respect to our sensor nodes. For ex-
ample, in every case we examined, the nodes facing
the rear of the vehicle had the most significant effect
on RSSI value, followed by nodes that faced to the
left or right of the vehicle. Nodes in front of the ve-
hicle had the least attenuation effect, approximately
1 RSSI in most cases. We quickly realized that the
materials in the vehicle produced this effect, due to
the orientation of our beacon (placed behind the vehi-
cle’s rear-view mirror). To the front and sides of the
vehicle, transmission was most often through a single
pane of autoglass. To the rear of the vehicle, it was
often through seats, metal, and in most cases the rear-
view mirror itself, resulting in as much as a 6 RSSI
decrease. In prior work, we globally increased all
recorded RSSI values to compensate for some of this
attenuation, however, improvements were limited and
inconsistent. Our current experiments and analysis
add clarity to this result. We used a tripod for finger-
printing so that we didn’t introduce a vehicle-specific
bias into our model, however the consequence of in-
consistent in-vehicle beacon attenuation became our
limiting factor. Our solution was to replace the tripod
dataset with a model constructed from beacon mea-
surements inside a vehicle. We selected the 370Z, due
to convenience and availability of the vehicle, but ac-
knowledge that the physical placement of the beacon
may produce positive results only for similarly ori-
ented vehicles (i.e. larger vehicles may need to have
their own radio map). We discuss experiments with
the in-vehicle model in the next subsection.
3.1.4 In-vehicle Fingerprinting
After re-fingerprinting the lot with the 370Z, we
trained new models, and repeated our per-space tests
as they provide better insight into the cause of fail-
ures. Results are shown in Table 4. Here we see
a similarly valid trained model with accuracy above
99% in all cases. Testing results for the Acura and
350Z also improved, in some cases significantly, al-
though the need for zone-based detection was clearly
still needed.
Table 4: Per-Space In-Vehicle (370) Fingerprinting Results.
Model
Default Optimized 1 Optimized 2
(Dataset) TP R TP R TP R
370 99.63% 1 99.56% 1 99.56% 1
370(TL o) 42.11% 0.92 40.79% 0.95 40.79% 0.95
370(350 o) 12.78% 0.85 13.75% 0.89 13.19% 0.89
We also recomputed these results using the zoned
scheme described in Section 3.1.2, and show results
in Table 5. Here we see marked improvements over-
all, with the default model achieving the highest accu-
racy. All tests produced results with ROC area above
0.99. This degree of accuracy, while not perfect in
all cases, is high enough that we proceeded with con-
structing the remainder of the solution around them.
We proceeded with mesh experiments in the next sub-
section.
Table 5: Zoned In-Vehicle (370) Fingerprinting Results.
Model
Default Optimized 1 Optimized 2
(Dataset) TP R TP R TP R
370 99.78% 1 99.67% 1 99.67% 1
370(TL o) 89.65% 0.99 89.39% 0.99 89.39% 0.99
370(350 o) 85.28% 1.0 79.86% 1 79.86% 1
3.2 Over-mesh Experiments
Our initial mesh experiments used a managed flood-
ing algorithm without our routing feature, and used
parameters that were extremely permissive in both
node link creation and message volume which re-
sulted in some areas of our mesh becoming very
dense. This section outlines experiments of our self-
forming mesh network, and our improvements that
lead to the sampled routing outlined in Section 2.
3.2.1 Self Forming Experiment
Recall our node deployment in Figure 3. When we
activated our mesh network nodes and the network
formed with our initial set of parameters, we noticed
that the mesh was not well formed. The network be-
came extremely dense and highly dependent on node
1. Additionally, no EDR nodes were observable by
node 8, resulting in the fog network and EDR net-
work being very isolated, routing exclusively through
node 1. Our solution was to deploy an EDR-only (no
vehicle sensing configuration) node (called node 10)
to a midpoint between node 8 and it’s nearest (but not
BLE observable) neighbor, node 4. This allowed us to
provide a redundant network path, lessening the risk
from the single path through node 1. We were also
able to more easily manipulate connection thresholds
due to this additional path, and discuss this further in
Sections 3.2.2 and 3.2.3.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
218

3.2.2 Prediction Over-mesh Experiments
Once our mesh network was established, we per-
formed beacon collection with the 370Z as our test
vehicles (to temporarily remove error due to vehicle
differences), and ran prediction tests using our cur-
rent model while collecting data from the central node
(since the network now existed to route data back to
it). Our preliminary results are shown in Table 6. We
examined the data used in this result, as well as mes-
sage collection metrics and other instrumentation, and
noticed large effects on the observability of beacons
in our mesh configuration. As both the EDR network
and the beacon scanning shared the same radio, one
could not function while the other was in use, result-
ing in fewer beacons being observed due to the load
placed on the radio by the mesh network. There was
also a very long delay in transmission of all beacons,
an effect that increased over time due to the ineffi-
ciently managed flooding algorithm we were using.
We also show the zoned version of our result in Ta-
ble 6. While improvements were seen, this result was
worse than data collected locally. After examining
the data, we noticed that most of the data collected
had gaps in observations from some nodes, causing
the model to perform poorly.
We concluded from these results that we must
find a way to reduce the number of messages routed
through the network. This would result in less mes-
sage flooding, providing more on-radio time for the
beacon receiver. We reprocessed our data to take the
maximum RSSI value for the entire observation win-
dow (of 5 minutes), and use that as a single predic-
tion case, instead of the 10-second time intervals we
had been using, as such windows were too short for
the beacon to be seen by any given node. We show
this in the same table, as Single Max. This resulted
in some improvement, but still below our non-mesh
result. This suggested, however, that sampling our
beacons to reduce message volume, may result in a
viable solution that would improve performance.
Table 6: Initial Over-Mesh Predication Results.
Model (Dataset) TP R
370 Per-Space (350 m1) 1.98% 0.60
370 Per-Space (350 m2) 9.72% 0.82
370 Per-Space (350 m1 Single Max) 8.33% 0.85
370 Per-Space (350 m2 Single Max) 8.33% 0.91
370 Zoned (350 m1) 46.33% 0.82
370 Zoned (350 m2) 61.94% 0.85
370 Zoned (350 m1 Single Max) 66.67% 0.68
370 Zoned (350 m2 Single Max) 75% 0.75
3.2.3 Message Down-sampling Experiments,
effects on prediction
To gain insight into the effects of down-sampling
without re-implementing our code, we took our in-
vehicle fingerprinting set and compiled several train-
ing sets, each with different sample rates. We chose to
favor heavily sampled sets, and chose 30, 60, 120, and
300 seconds as our sample rates. Results are shown
in Table 7. Here we see that all of our sampling rates
produced a highly accurate model, however we saw
diminishing returns when we passed the 60 second
sampling rate. We then re-implemented our mesh net-
work and beacon sampling solution with this rate, and
repeated our experiments with additional test vehi-
cles. The results are described in the next subsection.
Table 7: 370 Down-sampled Per-Space Results.
Model(dataset) TP R Model(dataset) TP R
370 (370 30s) 99.78% 1 370 (370 60s) 99.78% 1
370 (370 120s) 98.33% 1 370 (370 300s) 97.78% 1
3.2.4 Sampled and Routed Mesh Results
Prior to implementing our sampling solution in our
mesh network code, we attempted to resolve the radio
use problem by introducing sender invocation delays
in our mesh network, so that messages could queue
up on a node, then burst across to other nodes when
the sender established a connection. We performed an
experiment with this parameter in place with the 350
(constructing the 350 m3 dataset). We show this re-
sults in the first row of Table 8. This resulted in fewer
invocations of EDR connections, further reducing de-
mand on the radio. We also noticed that the mesh
network was introducing a large delay in the time the
central node received all of the messages needed to
make a prediction decision. While these were accept-
able, they were still not ideal, as these delays will
need to be increased as load increases. Such an ar-
rangement will not scale with more beaconing vehi-
cles entering the lot.
Instead we introduced a node selection and rout-
ing algorithm, Algorithm 3 in Section 2.2.1, imple-
mented the sampled message scheme previously de-
termined, and repeated mesh experiments with the
370, and Nissan Rogue (to add diversity with a larger
vehicle than the smaller ones we had been using).
We used the data from the 350 o and assembled a
sampled dataset with it’s values, without repeating
the over-mesh experiment with that vehicle. With
these three mesh datasets we tested the previously
constructed 370 Zoned model shown in the first three
lines of Table 8.
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes
219
We noticed that during our analysis that there was
a slight loss in accuracy when we trained a model
based on zoned labels, when compared to a per-space
model that was relabeled after prediction. Our final
modification to our prediction scheme was to use the
per-space model for prediction, but match each space
with its correct zone label after prediction. We then
took the majority result as the zone our system indi-
cates the vehicle to be located in. These results are
shown in the bottom 6 lines of Table 8. Here we see
that the 350z was predicted in the correct zone for all
of our test data, while the 370 and Rogue were correct
83.33% and 75% of the time, respectively. After ex-
amining our results more closely, we determined that
the lack of perfect prediction in the 370 and Rogue
cases were the result of 3 problematic spaces in our
test set, in some cases resulting in a 50% (but not a
majority) prediction. We seek to tune our model in
the future to solve the problem with those particular
spaces.
Table 8: 60s Sampled Mesh Results (Zoned only).
Model
Default
(Dataset) TP R
370 Zoned(350 m3) 83.33% 0.90
370 Zoned(370 m) 77.08% 0.88
370 Zoned(Rogue m) 77.08% 0.90
370 60s Post Zoned (350 m3) 95.83% -
370 60s Post Zoned (370 m) 85.41% -
370 60s Post Zoned (Rogue m) 75% -
370 60s Post Zoned Majority (350 m3) 100% -
370 60s Post Zoned Majority (370 m) 83.33% -
370 60s Post Zoned Majority (Rogue m) 75% -
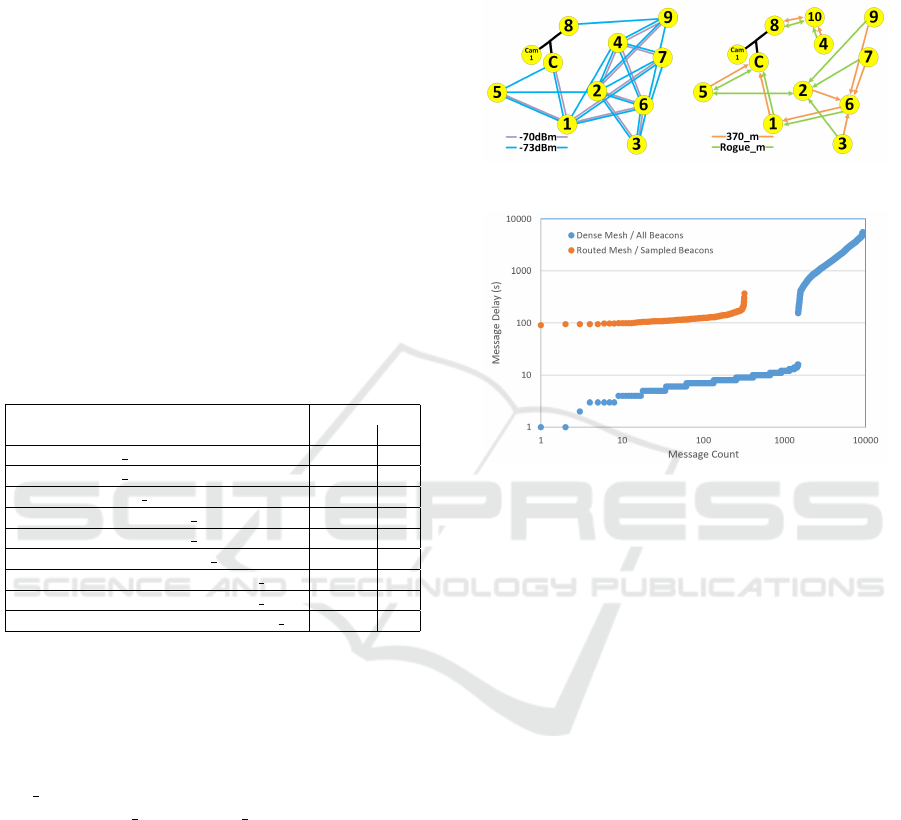
We also examined the message delay, to further val-
idate our choice to migrate from our previous man-
aged flooding solution to the lower-demand routing
one. Figure 8 shows the links established in two of
our dense mesh implementations used to create the
350 m3 dataset (left) with the routed implementation
used for the 370 m and Rogue m datasets (right). The
figure show that the network itself is much less dense
with the routed solution. During our experiments, we
also recorded the timestamp for when a message was
created, and a timestamp for when the central node re-
ceived that message. We then measured the difference
between these timestamps for both the dense mesh
and routed mesh implementations, shown in Figure 9
sorted by message delay. The routed mesh shown in-
cluded the 60 second beacon sampling, causing the
lower bound of all messages to be 60 seconds. While
the dense mesh produced message delivery for some
messages much faster than the sampled and routed so-
lution (during times of low load), its upper bound was
unacceptably large (more than an hour in some cases).
Consequently we selected the routed, sampled, imple-
mentation as our end solution, due to our results and
the expectation that as this solution scales well to mul-
tiple vehicles on a lot.
Figure 8: Dense Mesh vs. Routed Mesh.
Figure 9: Message Delay Comparison.
3.3 Camera vs. BLE based Vehicle
Entrance/Exit Detection
Our last set of experiments compares the use of the
object recognition camera based vehicle entrance and
exit detection (outlined in Section 2.2.1) with a BLE
only solution. We conducted a series of 10 instances
where the 370Z was driven into and out of the lot at a
constant speed of 10 mph, making one traversal in the
camera’s field of view, and its BLE beacon receiver
range. We found that -70 dBm was a consistent value
to use as a threshold for determining when the vehi-
cle passed by this node. We summarize the number
of beacons observed, the number of times the object
recognition camera recognized the vehicle as a car,
and the range of delay between when the beacon was
seen, and when the camera produced a detection event
over its serial connection in Table 9. This delay was
computed by attempting to match a beacon event with
a camera event, and measuring the time difference.
There is a consistent delay of several seconds from
when the vehicle passes in front of the camera, and a
detection decision is made. We also see that both the
camera and BLE beacon receiver observe a single ve-
hicle multiple times. However we also acknowledge
that if a vehicle travels too quickly it may not be de-
tected by the camera, so duplicates are welcomed.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
220
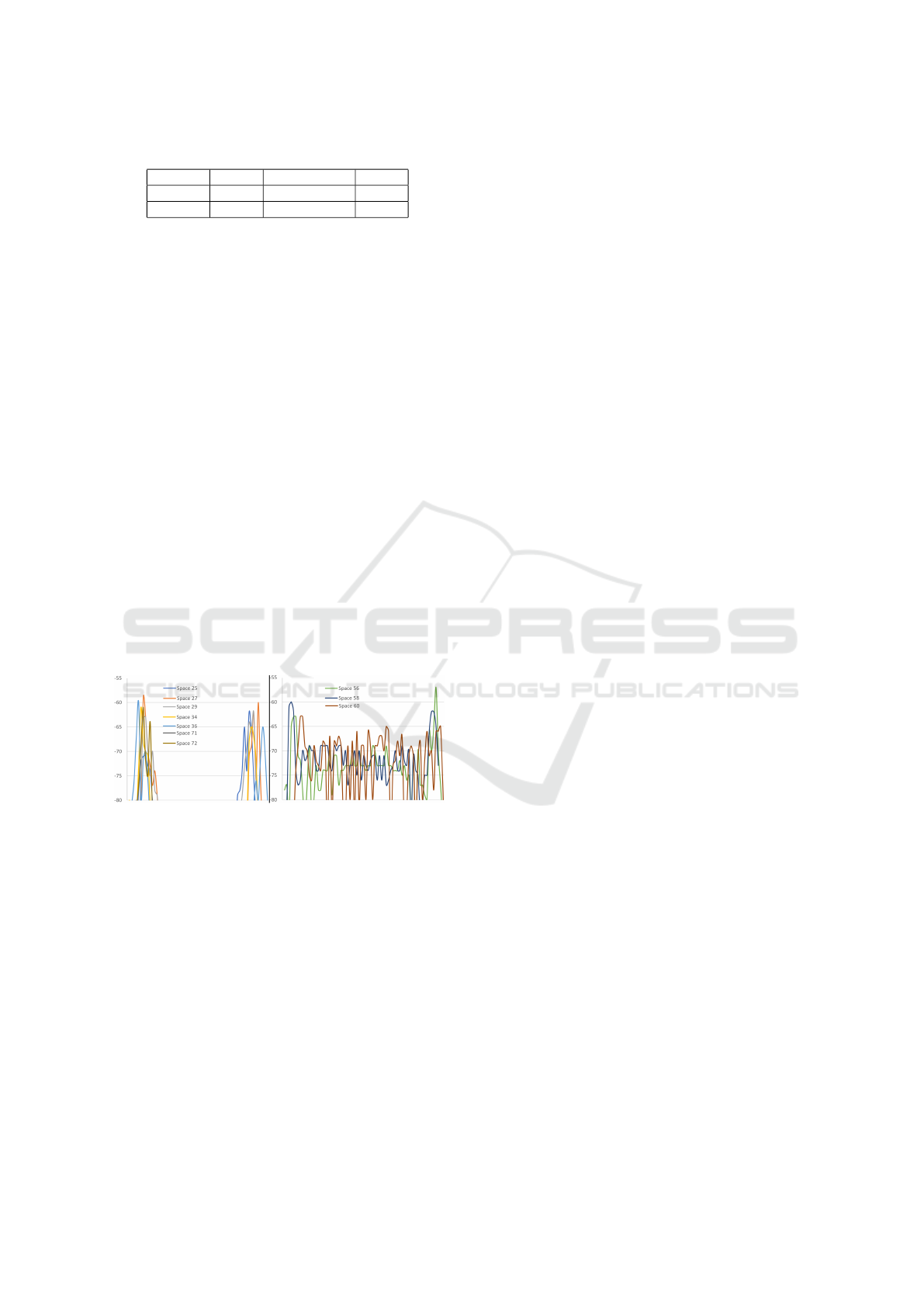
Table 9: Daytime Camera Recognition vs BLE (≤ 70 dBm).
Direction Beacons Recog. Objects delta t
Enter (10) 2-3 1-2 ”car” 0-3 sec
Exit (10) 1-4 1-3 ”car” 2-11 sec
We repeated this enter/exit experiment at night (with
no light), and found that the camera produced no de-
tection results, rendering it not usable in these con-
ditions. We coupled this experiment with other mesh
related parking experiments, including parking spaces
very near to the camera node’s beacon receiver. We
show these results in Figure 10. On the left, we see
now the camera node observes beacons for spaces far
from it, while on the right we see observations for
spaces that are close to the node. Although entrance
and exit are consistently detectable by this node, there
are false positives produced by beacon observations
of the vehicle while it’s parked, simply because those
spaces are physically close to the node. We conclude
from these experiments that the BLE solution is the
only solution that will function 24 hours a day, and
that this node was located too close to existing park-
ing spaces to make it a good discriminator for vehicle
entrance. For our chosen parking lot, the optimal so-
lution for vehicle detection would use an aggregate
from results from all nodes, rather than this particular
ingress point, reducing the impact of false positives at
any one node.
Figure 10: Night Entrance / Exit Detection.
4 RELATED WORK
Prior work with RSSI-based radio localization us-
ing IEEE 802.15.4 radio (Oguejioforo. et al., 2013)
and RSSI values used trilateration involving linear
distance calculations. Other work uses radio finger-
printing instead of distance estimation (Olevall and
Fuchs, 2017). Silver (Silver, 2016) combines vari-
ous value filtering techniques and compares disc tri-
lateration and k-nearest neighbor fingerprinting tech-
niques. (Daniay and Cemgil, 2017) focuses on RSSI
fingerprinting of moving beacons using a combina-
tion of Wasserstein distance interpolation, k-nearest
neighbor, and Neural Networks. Radio selection is
diverse as well, with Faragher and Harle comparing
use of BLE and WiFi (Faragher and Harle, 2014).
Additional indoor wireless positioning techniques are
found in (Liu et al., 2007). Initially, we used a con-
trolled flooding algorithm similar to the Bluetooth
SIG BLE mesh specification (ble, 2017), however
our solution uses Bluetooth classic (EDR) instead of
BLE to transmit network messages. Additional flood-
ing (Kim et al., 2015) and routed Bluetooth mesh net-
works are surveyed in (Darroudi and Gomez, 2017)
Research in Smart Parking systems encompasses
many aspects of parking management including space
occupancy detection, space availability prediction,
payment management, rule violation alerts, and much
of the IT infrastructure used to connected these as-
pects into a unified system. (Liniger, 2015) uses
GPS-based localization augmented by mobile phones
and BLE beacons. This information is combined with
the vehicle’s On-Board Diagnostic (OBD-2) data to
measure the state of the vehicle (speed, etc.). (Fabian,
2015) provides a solution that uses BLE trilatera-
tion to develop a local parking management solu-
tion. Yee et al. (Yee and Rahayu, 2014) uses Zig-
bee radios. Some solutions on dead reckoning and
other navigation-based solutions, such as those found
within smartphone inertial sensors (Gao et al., 2017)
that benefit from no requirement to modify the inter-
nal space, but controlled by the vehicle owner, making
localization results untrustworthy. Other solutions use
historic data or and crowd-sourced GPS information
to estimate space occupancy (Hobi, 2015).
Several parking management solutions that use
per-space sensing based on Radio-frequency iden-
tification (RFID), optical, or magnetic technologies
have been suggested (Mainetti et al., 2015; Gandhi
and Rao, 2016; Patil and Bhonge, 2013; Sadhukhan,
2017) but lack experimental validation or details on
communication and other protocols used. The viabil-
ity of these solutions are hard to compare with ours,
due to the apparent lack of experimental rigor. In-
stead we use Random Forest classifiers for radio lo-
calization. Additional examples of the diversity in ap-
plications of Random Forest classifiers (beyond park-
ing prediction) can be found in (Belgiu and Dragut,
2016).
5 CONCLUSION
We provide a reliable and accurate system to de-
termine zone-based parked vehicle occupancy and
convey that information to external networks using
only Bluetooth radio. Our zone-based solution is
shown to be more accurate than per-space determi-
Smart Parking Zones using Dual Mode Routed Bluetooth Fogged Meshes
221

nations. We designed a means to integrate camera-
based object recognition into our system to provide
additional vehicle attestation options, and performed
an experiment-based comparison of this implementa-
tion to our BLE-only solution. Outdoor parking lot
owners can use solutions like ours to cheaply and eas-
ily deploy seamless smart parking solutions.
ACKNOWLEDGEMENTS
The author’s affiliation (pseymer@mitre.org) with
The MITRE Corporation is provided for identifica-
tion purposes only, and is not intended to convey or
imply MITRE’s concurrence with, or support for, the
positions, opinions, or viewpoints expressed by the
author. Approved for Public Release 19-0071. Distri-
bution Unlimited.
REFERENCES
(2017). Bluetooth mesh profile specification.
Belgiu, M. and Dragut, L. (2016). Random forest in remote
sensing: A review of applications and future direc-
tions. ISPRS Journal of Photogrammetry and Remote
Sensing, 114:24 – 31.
Daniay, F. S. and Cemgil, A. T. (2017). Model-based local-
ization and tracking using bluetooth low-energy bea-
cons. Sensors, 17(11).
Darroudi, S. M. and Gomez, C. (2017). Bluetooth low en-
ergy mesh networks: A survey. Sensors, 17(7):1467.
Fabian, H. (2015). A public parking management system
for zurich. Master’s thesis, University of Zurich.
Faragher, R. and Harle, R. (2014). An analysis of the ac-
curacy of bluetooth low energy for indoor positioning
applications. In Proceedings of the 27th International
Technical Meeting of The Satellite Division of the In-
stitute of Navigation (ION GNSS+ 2014), pages 201 –
210, Tampa, Florida.
Gandhi, B. M. K. and Rao, M. K. (2016). A prototype for
iot based car parking management system for smart
cities. Indian Journal of Science and Technology,
9(17).
Gao, R., Zhao, M., Ye, T., Ye, F., Wang, Y., and Luo, G.
(2017). Smartphone-based real time vehicle tracking
in indoor parking structures. IEEE Transactions on
Mobile Computing, 16(7):2023–2036.
Hobi, L. (2015). The impact of real-time information
sources on crowd-sourced parking availability predic-
tion. Master’s thesis, University of Zurich.
Holtmann, M. and Hedberg, J. (2018). Bluez - official linux
bluetooth protocol stack.
Itti, L. (2018). Darknet yolo jevois module.
JeVois Inc (2018). Jevois-a33 smart camera.
karulis (2018). Pybluez - python extension module allowing
access to system bluetooth resources.
Kim, H., Lee, J., and Jang, J. W. (2015). Blemesh: A wire-
less mesh network protocol for bluetooth low energy
devices. In 2015 3rd International Conference on Fu-
ture Internet of Things and Cloud, pages 558–563.
Liniger, S. (2015). Parking prediction techniques in an iot
environment. Master’s thesis, University of Zurich.
Liu, H., Darabi, H., Banerjee, P., and Liu, J. (2007). Sur-
vey of wireless indoor positioning techniques and
systems. IEEE Transactions on Systems, Man,
and Cybernetics, Part C (Applications and Reviews),
37(6):1067–1080.
Mainetti, L., Patrono, L., Stefanizzi, M. L., and Vergallo,
R. (2015). A smart parking system based on iot pro-
tocols and emerging enabling technologies. In 2015
IEEE 2nd World Forum on Internet of Things (WF-
IoT), pages 764–769.
Oguejioforo., S., Okorogu, V., Abe, A., and OsuesuB., O.
(2013). Outdoor localization system using rssi mea-
surement of wireless sensor network. In International
Journal of Innovative Technology and Exploring En-
gineering, volume 2.
Olevall, A. H. and Fuchs, M. (2017). Indoor navigation and
personal tracking system using bluetooth low energy
beacons. Master’s thesis.
Patil, M. and Bhonge, V. N. (2013). Wireless sensor net-
work and rfid for smart parking system.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv.
Sadhukhan, P. (2017). An iot-based e-parking system for
smart cities. 2017 International Conference on Ad-
vances in Computing, Communications and Informat-
ics (ICACCI), pages 1062–1066.
Seymer, P., Wijesekera, D., and Kan, C.-D. (2019). Se-
cure outdoor smart parking using dual mode bluetooth
mesh networks. In 89th IEEE Vehicular Technology
Conference.
Silver, O. (2016). An indoor localization system based on
ble mesh network. Master’s thesis, Link
¨
oping Univer-
sity.
StarTech (2018). Mini usb bluetooth 4.0 adapter - 50m
(165ft) class 1 edr wireless dongle.
Yee, H. C. and Rahayu, Y. (2014). Monitoring parking
space availability via zigbee technology. Interna-
tional Journal of Future Computer and Communica-
tion, 3(6):377.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
222
