
Path Planning of a Mobile Robot in Grid Space using Boundary Node
Method
R. A. Saeed
a
and Diego Reforgiato Recupero
b
Department of Mathematics and Computer Science, University of Cagliari, Cagliari, Italy
Keywords:
Robot Path Planning, Boundary Node Method, Path Enhancement Method, Autonomous Mobile Robot.
Abstract:
This paper presents a new off-line path planning method for a mobile robot to generate an optimal or near-
optimal collision-free path between starting and goal points in a given working environment with obstacles.
In a new method called Boundary Node Method, the robot is simulated by nine-node quadrilateral element,
the centroid node represents the robot’s location and it moves with eight-boundary nodes in the working
environments. A robot is exploring an environment with the help of the node’s potential value at each location,
where the potential value is calculated based on the proposed potential function. The proposed method is
capable of generating the initial collision-free path for a mobile robot safely and quickly. Subsequently, an
additional new method called Path Enhancement Method is used to find shortest path by reducing the overall
initial path length. The simulation results indicate that this method can successfully generate an optimal or
near-optimal collision-free path efficiently.
1 INTRODUCTION
Path planning has been widely applied in many
robotic applications (Atzeni and Recupero, 2018) to
perform various tasks that humans could not accom-
plish, such as nuclear facilities (Chao et al., 2018),
space exploration (Shum et al., 2015), rescue mission,
landmines and enemies in war field (Zhang et al.,
2013), etc. Therefore, the problem of path plan-
ning has attracted many researchers’ attention (Zhang
et al., 2013; Kala et al., 2011). The objective of path
planning is to construct a collision-free path for mo-
bile robots to move from a starting point to destina-
tion point in a given working environment with ob-
stacles and optimizing it with respect to some cri-
teria, i.e. the walking distance, the walking time,
the energy consumption, etc (Leena and Saju, 2014;
Han and Seo, 2017; Victerpaul et al., 2017). The
existing methods are mainly categorized into classi-
cal and heuristic path planning (Zhang et al., 2013;
Han and Seo, 2017). The classical methods involve
finding a set of defined steps to search for the solu-
tion from an initial position to a goal position, they
include cell decomposition, potential field method,
subgoal network and road map (LaValle, 2006). It
a
https://orcid.org/0000-0002-7385-0167
b
https://orcid.org/0000-0001-8646-6183
has been found that the classical methods have some
disadvantages like high computational cost, trapping
into local minima and high time complexity in high
dimensions (Zhang et al., 2013; Brand et al., 2010;
Leena and Saju, 2014). Therefore, many heuris-
tic methods have been proposed, i.e. Genetic Al-
gorithm (GA) (Lamini et al., 2018), Particle Swarm
Optimization (PSO) (Zhang et al., 2013), Artificial
Neural Networks (ANNs), Ant Colony Optimization
(ACO) (Brand et al., 2010; Mac et al., 2016), and
Fuzzy Logic (FL) (Brand et al., 2010). Heuristic path
planning methods are computationally more efficient
with better performances in term of path distance, ob-
stacle avoidance, and elapsed time (Brand et al., 2010;
Leena and Saju, 2014; Mac et al., 2016), but these
algorithms are not guaranteed to provide the optimal
solution (Rintanen, 2006; LaValle, 2006). The com-
binatorial path planning methods in continuous space
can solve many path planning problem and construct
optimal solution efficiently (Bi et al., 2008; LaValle,
2006; Huang and Tsai, 2011; Montiel et al., 2015;
Contreras-Cruz et al., 2015; Song et al., 2016).
Additionally, many researchers made some mod-
ifications and extensions to improve the performance
and to overcome the limitations of the existing meth-
ods for solving the path planning problem. For in-
stance, authors in (Wang et al., 2018) proposed a
novel learning-based multi-RRT s (LM − RRT ) ap-
Saeed, R. and Recupero, D.
Path Planning of a Mobile Robot in Grid Space using Boundary Node Method.
DOI: 10.5220/0007747301590166
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 159-166
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
159

proach for robot path planning in complex environ-
ments with narrow passages. A new repulsive po-
tential function is proposed by (Ge and Cui, 2000)
to solve the problem of non-reachable goals with ob-
stacles nearby (GNRON) in potential field method.
The shortest path with the minimum time required
for the global path planning is investigated in (Shilt-
agh and Jalal, 2013) by using Modified PSO. Authors
in (Fu et al., 2018; Guruji et al., 2016; Ducho
ˇ
n et al.,
2014) proposed an improved version of A Star algo-
rithm to overcome inherent drawbacks of the origi-
nal A Star. A new fitness function for GAs is pro-
posed by (Lamini et al., 2018) for optimizing en-
ergy consumption for a mobile robot. Some optimal
path planning algorithms are presented in (Jan et al.,
2008) for navigating mobile robot among obstacles
and weighted regions.
Many of the existing methods for robot path plan-
ning are able to find a path from an initial position to
a given target, but they are either not accurate enough
or their efficiency is not sufficient. Researchers have
always been seeking a better solution to improve the
performance of the existing path planning methods.
A list of goals that researchers of several previous
works have been pursuing is the following: improve
the accuracy (Liu et al., 2018; Shum et al., 2015;
Goyal and Nagla, 2014), improve the efficiency (Hu
and Yang, 2004), increase safety (Chao et al., 2018;
Shum et al., 2015; Fu et al., 2018), increase the capa-
bility (Shiltagh and Jalal, 2013), reduce the process-
ing time (Ducho
ˇ
n et al., 2014; Guruji et al., 2016),
overcome the non-reachable goal problem (Ge and
Cui, 2000), pass through narrow passages (Jan et al.,
2008).
In the literature, the problem of path planning
for mobile robots has been widely discussed and re-
searchers explored a variety of solutions. However,
several important gaps and limitations remain to be
addressed. For example, in several works, the com-
putational time is still too high because of the pro-
cessing a lot of unnecessary points. Moreover, the
search for an optimal path might not succeed (Han
and Seo, 2017). And also, there are many methods
that use random operation to produce a set of solu-
tions for each independent run. Then, in order to find
the optimized solution, all of these different solutions
are selected, combined and replaced. This process re-
quires a lot of computational time. Based on the limi-
tations and research gaps as previously explained, we
investigate a new efficient method called Boundary
Node Method (BNM) to generate a feasible path for
the robot to move from starting point to ending point
in the workspace without colliding with any obsta-
cles. The BNM is capable of finding the path for mo-
bile robot effectively and efficiently in terms of path
length and computational time, even if the complexity
of the environment is increased. Moreover, a valuable
benefit of this method is its simplicity and can be ap-
plied in a grid environment efficiently.
The remainder of this paper is structured as fol-
lows: Section 2 introduces the problem statement. In
Section 3, a brief description of the proposed method
for generating feasible path is introduced. In Sec-
tion 4, the application of the proposed method is pre-
sented, and then the evaluation results are reported
and discussed. Final conclusions and remarks for fu-
ture research improvements are provided in Section 5.
2 PROBLEM FORMULATION
The path planning problem is formulated as fol-
lows: for a given two-dimensional (2D) robot work-
ing space C ⊂ R
2
, the region of the working space oc-
cupied by obstacles is denoted by C
obs
and the region
of the working space free of obstacles is represented
by C
f ree
= C – C
obs
. Each position within C
f ree
is
reachable by the robot. The continuous workspace is
divided into square grid cells. Each grid cell of the
space has integer coordinates of the form C(x, y) ∈
C, 1 ≤ x ≤ n, 1 ≤ y ≤ m, which either corresponds to
a navigable area C(x, y) ∈ C
f ree
or a space occupied
by obstacles C(x, y) ∈ C
obs
. We assume that all infor-
mation related to the workspace is known in advance,
obstacles are also assumed to be fixed in their position
in the workspace. Each grid cell C(x, y) in C
f ree
has a
potential value E(x, y) ∈ E, which is calculated based
on the potential function. The robot is requested to
move from starting point (C
s
) to goal point (C
g
) in the
workspace without colliding with any obstacles. It is
expected that the robot reaches the final destination
point safely through the shortest walking route within
minimum computational time.
3 BOUNDARY NODE METHOD
In BNM, the robot is simulated by nine-node quadri-
lateral element, the centroid node represents the
robot’s location and it moves with eight-boundary
nodes in the workspace. The robot position in the
workspace is denoted by C
r
(x
r
, y
r
) ∈ C
f ree
. The
robot moves forward and changes its motion direction
based on the potential values and features of bound-
ary nodes. All Way-points w visited by the robot se-
quentially represent the obtained initial feasible path
(IFP). For better clarity, these way-points are con-
nected into a continuous path, the line segment that
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
160
connects two way-points sequences is represented by
P
l,l+1
⊂ IFP. A complete path IFP is formed by con-
catenation of all inter-line segments P
l,l+1
, 1 ≤ l ≤
w − 1 as follows: IFP = [P
1,2
, P
2,3
. . . , P
w−1,w
]. The
robot’s working space used in this study is divided
into square grid cells, and the centre of all grid cells
in the given workspace meets the following equation:
C =
n
∑
x=1
m
∑
y=1
C(x, y) (1)
where n and m represent the width and height of the
workspace. C(x, y) represents the location of the grid
cells in the workspace, and the length of each grid cell
is equal to 1 unit.
After constructing a model for the workspace, the
potential value for each grid point E(k) (1 ≤ k ≤ N),
(N = n × m) is calculated based on the new proposed
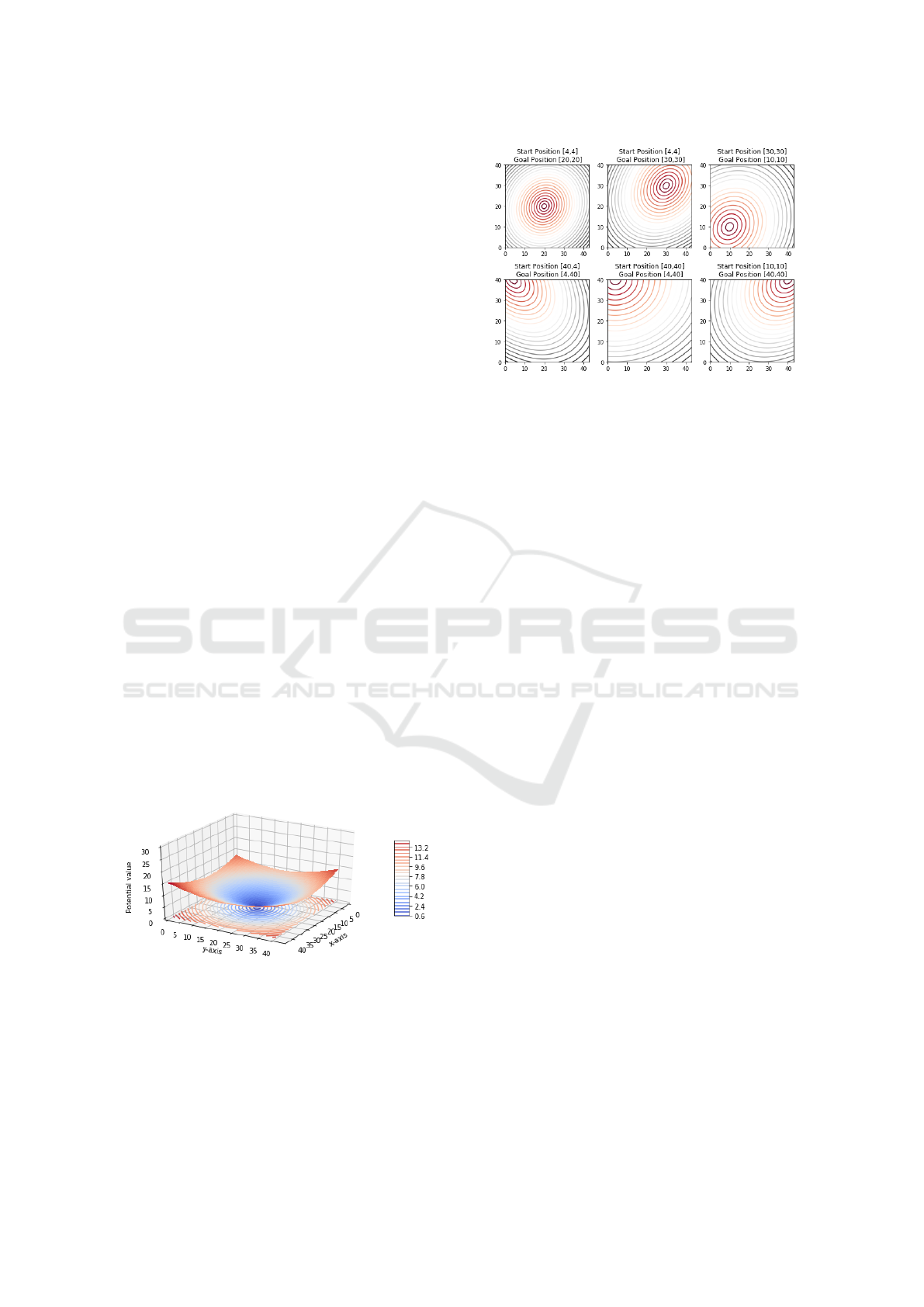
potential function as illustrated in Figure 1. The po-
tential function for several different starts and goal
positions are shown in Figure 2. The potential func-
tion is used to direct the robot toward the C
g
, and it
has the lowest potential value at a final destination
point and the potential value increases as the robot
move further away. As shown in the Figure 2, the
line’s colour represents the potential value, i.e. the
blue line corresponds to the lowest potential value
and the red line corresponds to the highest potential
value. The shape of the potential function and obsta-
cles in a 2D model of the robot’s workspace is pre-
sented in Figure 3. As shown in the figure, a num-
ber of static obstacles (1 × 1 unit) are distributed at
different locations in the workspace. The centre of
obstacle’s cells is represent by Cartesian coordinates
C
obs
(h, l), (h = 1...2, l = 1...O), where h = 1 and h = 2
corresponding to x and y-coordinate, respectively, and
O representing the number of obstacles.
Figure 1: Potential value for each cell in the workspace in
3D view with contour plot. The size of the workspace is
44 × 44, and the C
g
is located (20, 20).
3.1 Simulate the Robot
In this method the robot is simulated by nine-node
quadrilateral element (see Figure 4a), the centroid
node represents the robot’s location (see Figure 4b)
Figure 2: Potential function with considering several dif-
ferent start and goal Locations.
and it moves with eight-boundary nodes exploring in
the workspace (see Figure 4c) to find the IFP. The
nodes are denoted by p(q), (q = 1...9), and their lo-
cations can be formulated by using Equation 2. In
simulated model, the node p(5) represents the robot’s
location and the other nodes p(1 → 4) with p(6 → 9)
represent the boundary nodes which are distributed
uniformly around the robot location as shown in Fig-
ure 4a. The current location of all nodes in the
workspace at any iteration t is denoted by p
1
(t),
meanwhile the robot location in the simulated model
is denoted by p
r
(t) ∈ p
1
(t). The set of x and y-
coordinate of the robot and all boundary nodes are
represented by two vectors, x
1
(t) = (x
11
, x
12
, ..., x
19
)
and y
1
(t) = (y
11
, y
12
, ..., y
19
) respectively, p
1
(t) is
formed by vertically concatenating x
1
(t) and y
1
(t),
p
1
(t) = [x
1
(t); y
1
(t)].
p(q) =
x, y q=5
(x + v
x
, y), (x, y + v
y
),
(x − v
x
, y),
(x, y − v
y
) q = 2, 4, 6, and 8
(x + v
x
, y + v
y
), (x − v
x
, y + v
y
),
(x − v
x
, y − v
y
),
(x + v
x
, y − v
y
) q = 1, 3, 7, and 9
(2)
where x and y are the distance between the center of
the grid cell and x and y − axis, v
x
and v
y
are the hor-
izontal and vertical distance between the robot and
boundary nodes, we assume that v
x
= v
y
= 1 unit.
In each iteration t, the robot and boundary nodes
p(q), (q = 1...9) are moved in one particular direc-
tion in the workspace. The current robot’s location
with boundary nodes can be described as p
1
(t) =
[x
1
(t); y
1
(t)], and the new updated location of all
nodes denoted by p
2
(t) = [x
2
(t); y
2
(t)]. The robot
Path Planning of a Mobile Robot in Grid Space using Boundary Node Method
161
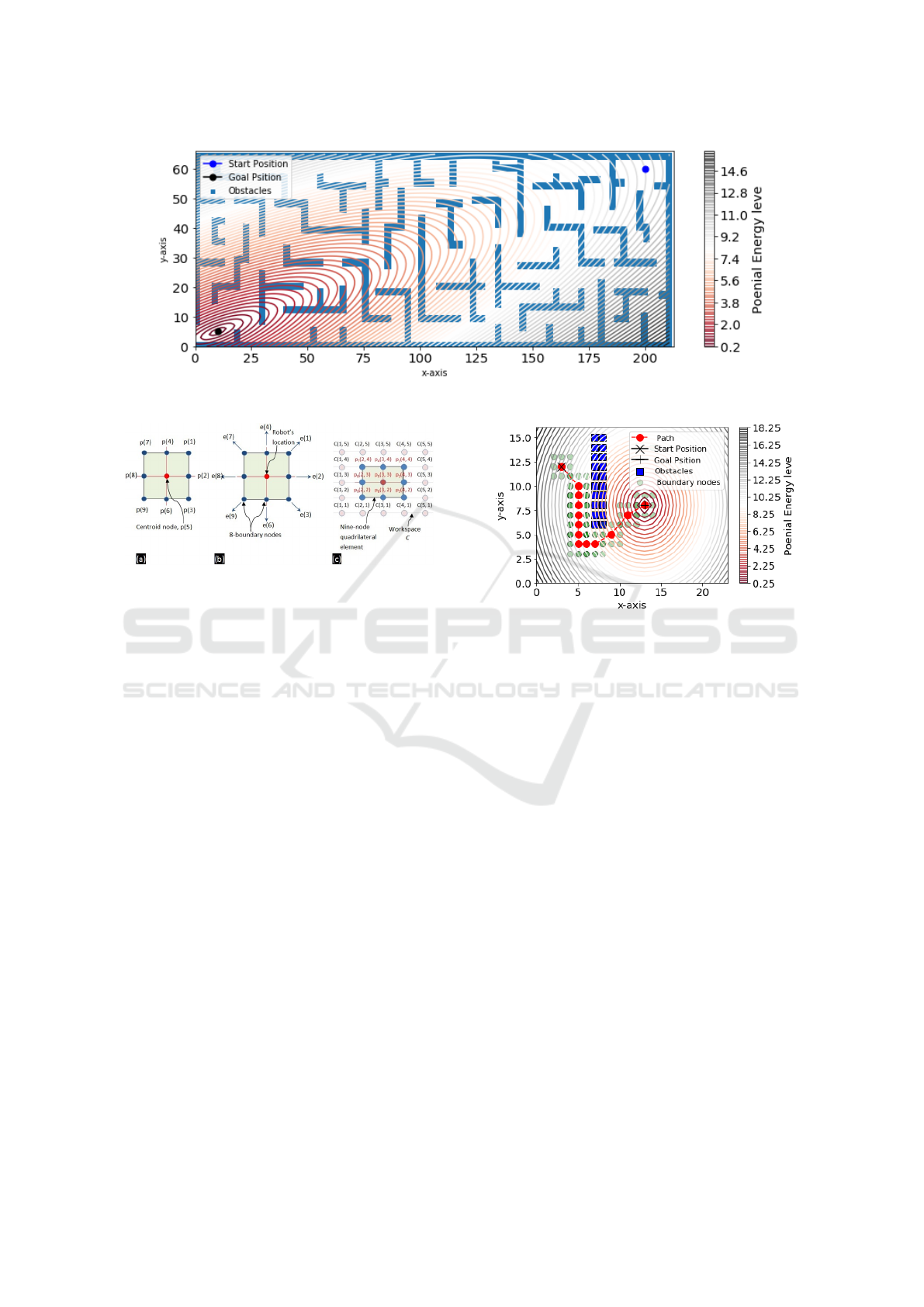
Figure 3: 2D model of the robot’s workspace.
Figure 4: A nine-node quadrilateral element (a) along with
its motion directions (b) and exploration location in the
workspace (c).
interference the obstacles when the distance between
the robot and the obstacles is less than 1 unit. There-
fore, the robot and boundary nodes require to avoid
obstacles and changing its moving direction by se-
lecting a new position in the C
f ree
. Characteristics
of boundary nodes, their position and potential val-
ues, guides the robot toward the goal location. On the
other hand, the characteristics of boundary nodes can
help the robot to avoid the obstacles. To explain how
the robot avoids the obstacles and changing its motion
direction with the help of boundary nodes, consider
a simple workspace example shown in Figure 5. As
shown in the figure, the robot position p(5) is repre-
sented by a red circle object and the boundary nodes
p(1 → 4) and p(6 → 9) are represented by green cir-
cle object.
Initially, the robot’s position p(5) is coincide with
C
s
(see Figure 5). In the first iteration t = 1, the robot
with boundary nodes change their positions from cur-
rent position p
1
(1) to new position p
2
(1) toward the
goal. In the second iteration t = 2, as the robot move
toward the goal with boundary nodes, the nodes p(1),
p(2), and p(3) interference with the obstacles, as
demonstrated in the Figure 5. Then the robot investi-
gates the workspace to find the next position without
colliding any obstacle. In this study, the direction of
the robot motion could be to the left, right, forward or
Figure 5: Demonstrates an example of path planning and
obstacle avoidance for mobile robot in a static environment
using BNM, where the sequence of the red circle objects is
represents the best solution of IFP.
backward. As shown in Figure 5, the robot can only
move in the y-direction, either upward or downward
direction. Changing the motion direction depends on
the potential value, E. Because E(4) is greater than
E(6), therefore the next position of the robot must be
in the downward direction. The same procedure is re-
peated by shifting the robot to the downward direction
until it passes the block of obstacles. The distance be-
tween the p
r
(t) and the C
g
is decrease step by step
until the robot reaches to the global minimum at the
goal position. The simulation result of the BNM is the
IFP, which is consist a set of way-points visited by
the robot starting from the initial point and ending at
the goal point. The BNM can generate the IFP safely
and efficiently, but the path is not optimal in term of
the total path length. Therefore, the PEM is intro-
duced to reduce the number of way-points as well as
the overall length of IFP.
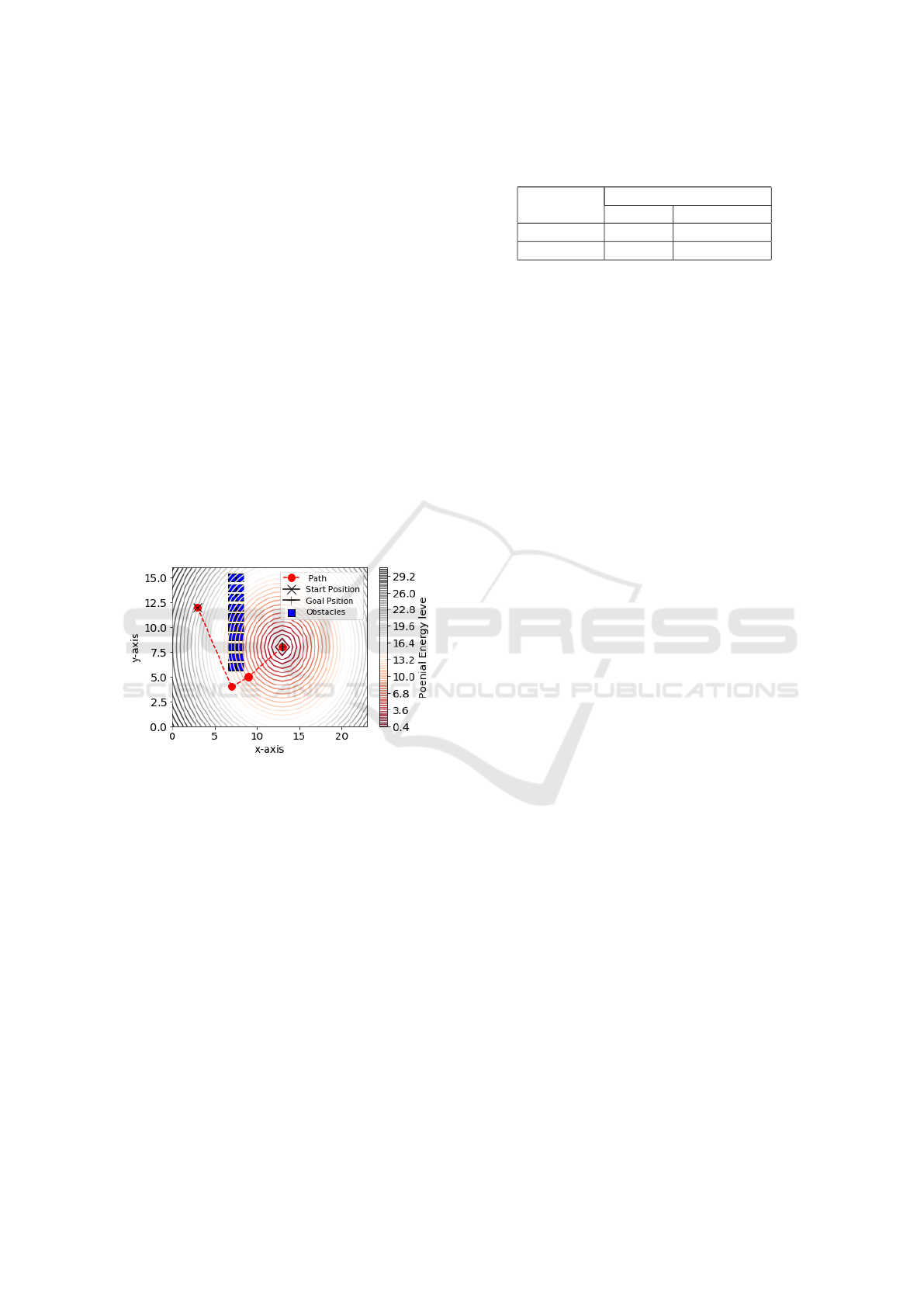
3.2 Path Enhancement Method
This section introduces the PEM to obtain the short-
est path (see Figure 6) from IFP (see Figure 5). As
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
162
shown in the figure, the way-points in the IFP are rep-
resented by a set of red circles object between C
s
and
C
g
. The robot starts to move from the starting point
and tracked through all the intermediate waypoints
until it reaches the goal point. The PEM method is
applied to reduce the number of way-points as well as
the overall length of IFP. The applied results show
that the number of way-points between C
s
and C
g
has
been reduced from 13 (see Figure 6) to 4 way-points
(see Figure 6). The length of all line segments that
connects all way-points sequentially to each other is
representing the path length. The length of the short-
est path U is calculated by using the following equa-
tion:
U =
I
∑
i=1
(sqrt(u
1x
(i) − u
2x
(i))
2
+ (u
1y
(i) − u
2y
(i))
2
)
(3)
where U is the total path length, I is line segment
number and u
1x
(i), u
2x
(i), u
1y
(i), u
2y
(i) are represent
the x and y cartesian coordinates of the left-hand and
right-hand ends of the line segment U(i).
Figure 6: Constructing the shortest-path from way-points in
a 2D workspace. Way-points defining the path are marked
with red circles object. The red dashed line represents a
shortest path found by using BNM and PEM.
4 SIMULATION
In this study, all simulations have been performed in
python. All simulations results presented in this paper
have been computed on a laptop Intel(T M) Core(T M)
i5-8300H CPU, 2.3GHz, and 8GB RAM. Two dif-
ferent workspace scenarios with different complexity
are designed. In the first scenario, several different
start and goal Locations are considered. In all scenar-
ios the size of workspace and obstacles scattered in
the navigation space are same. Whereas, a complex
environment with a high number of obstacles in dif-
ferent sizes is considered in the second scenario. The
start and goal points are positioned in the free space
Table 1: The total path length of the initial and final path
obtained by BNM and PEM.
Workspace Total Path Length [unit]
No. IFP Final Path
1 512.748 241.117
2 529.591 268.822
C
f ree
. The proposed method was examined to find an
optimal or near the optimal path from C
s
to C
g
. The
simulation results of BNM and PEM are presented in
subsections 4.1 and 4.2, respectively.
4.1 Simulation Results of BNM
This section presents the application results of the
BNM for generating the IFP between C
s
and C
g
. The
simulation results for all tested scenarios are shown in
Figures 7 and 8. The achieved result of IFP is repre-
sented by a set of way-points w( j), ( j = 1 → J). Each
new point position w( j + 1) allocated after the current
point position w( j) on the path, where J represents the
time in which the robot is reaching to the final desti-
nation point. In the first scenario, the way-points of
the robot’s motion path are represented by red circles
object and for better clarity, these way-points are con-
nected into a continuous path (see Figure 7). In the
second scenario, the way-points of the robot’s motion
path are represented by the red solid line (see Fig-
ure 8).
From the figures, it is observed that the IFP allow
the robot to move from C
s
to C
g
, and avoid obstacles
successfully. As it can be seen from the results, BNM
was able to overcome the local minima problem. The
results show that BNM has been well applied to gen-
erate IFP for mobile robot and achieved important
achievements. However, the path is not optimal in
term of the total path length. In order to reduce the
overall length of IFP, a new method PEM is intro-
duced as explained in Section 3.2, and the application
results are presented in the following subsection.
4.2 Simulation Results of PEM
This section presents the obtained results of the PEM
to find the optimal or near-optimal path. The best
obtained solutions are presented in Figures 9 and 10.
Whereas the red dashed lines in Figure 9 and red solid
lines in Figure 10 are represent the best-obtained so-
lution. As shown in the figures, the proposed method
can find the collision-free path that covers the least
number of way-points to reach the final destination
point. The computational results of the path length
from the proposed method for the second scenario is
provided in Table 1. As revealed in the table, the total
path length from [10, 5] to [200, 60] and from [200, 60]
Path Planning of a Mobile Robot in Grid Space using Boundary Node Method
163

Figure 7: The IFP obtained by using BNM for the first scenario.
Figure 8: The IFP obtained by using BNM for the second scenario.
to [10, 5] is significantly reduced, where the percent-
age of enhancement of the path length are 113% and
97% respectively.
5 CONCLUSIONS
In this paper we have introduced a new method called
Boundary Node Method BNM for solving the path
planning problem for a mobile robot. The proposed
method is applied to generate an initial collision-free
path for the mobile robot to move from starting point
to final destination point without colliding with any
obstacles. Consequently, an additional method, Path
Enhancement Method PEM, is used to find an opti-
mal or near optimal collision-free path from the ini-
tial path by minimizing the overall path length. Both
methods, BNM&PEM, are introduced to provide the
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
164
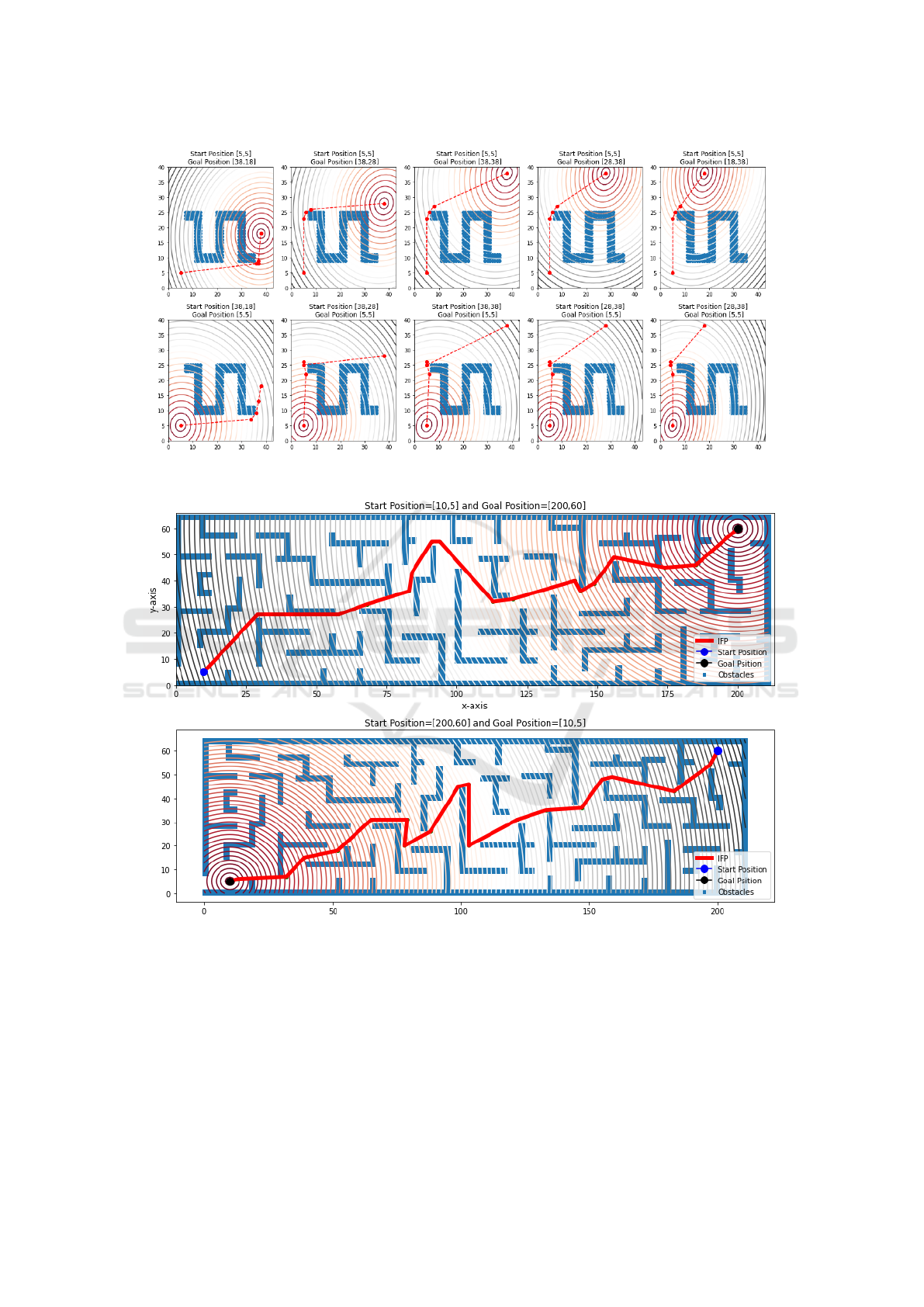
Figure 9: An optimal or near-optimal path obtained by applying BNM&PEM for the first scenario.
Figure 10: An optimal or near-optimal path obtained by applying BNM&PEM for the second scenario.
optimal path between start and goal points. Simu-
lation results demonstrate that the BNM&PEM can
generate the optimal or near optimal collision-free
path for the mobile robot to navigate in a compli-
cated environment, efficiently. As future work, we
will deal with obstacles of different sizes and forms
(irregular or arbitrary shape) and static or dynamic.
Also, we will evaluate the performance of the other
proposed types of the elements such as nine-node cir-
cular, seventeen-node quadrilateral, and thirteen-node
octagonal. Finally, we are currently working on a val-
idation of the proposed method on real robots, NAO
from Aldebaran Robotics.
Path Planning of a Mobile Robot in Grid Space using Boundary Node Method
165

REFERENCES
Atzeni, M. and Recupero, D. R. (2018). Deep learning and
sentiment analysis for human-robot interaction. In The
Semantic Web: ESWC 2018 Satellite Events - ESWC
2018 Satellite Events, Heraklion, Crete, Greece, June
3-7, 2018, Revised Selected Papers, pages 14–18.
Bi, Z., Yimin, Y., and Wei, Y. (2008). Hierarchical planning
approach for mobile robot navigation under the dy-
namic environment. In Industrial Informatics, 2008.
INDIN 2008. 6th IEEE International Conference on,
pages 372–376. IEEE.
Brand, M., Masuda, M., Wehner, N., and Yu, X.-H. (2010).
Ant colony optimization algorithm for robot path
planning. In Computer Design and Applications (IC-
CDA), 2010 International Conference on, volume 3,
pages V3–436. IEEE.
Chao, N., Liu, Y.-k., Xia, H., Ayodeji, A., and Bai, L.
(2018). Grid-based rrt for minimum dose walking
path-planning in complex radioactive environments.
Annals of Nuclear Energy, 115:73–82.
Contreras-Cruz, M. A., Ayala-Ramirez, V., and Hernandez-
Belmonte, U. H. (2015). Mobile robot path planning
using artificial bee colony and evolutionary program-
ming. Applied Soft Computing, 30:319–328.
Ducho
ˇ
n, F., Babinec, A., Kajan, M., Be
ˇ
no, P., Florek, M.,
Fico, T., and Juri
ˇ
sica, L. (2014). Path planning with
modified a star algorithm for a mobile robot. Procedia
Engineering, 96:59–69.
Fu, B., Chen, L., Zhou, Y., Zheng, D., Wei, Z., Dai, J., and
Pan, H. (2018). An improved a* algorithm for the
industrial robot path planning with high success rate
and short length. Robotics and Autonomous Systems.
Ge, S. S. and Cui, Y. J. (2000). New potential functions
for mobile robot path planning. IEEE Transactions on
robotics and automation, 16(5):615–620.
Goyal, J. K. and Nagla, K. (2014). A new approach of path
planning for mobile robots. In Advances in Comput-
ing, Communications and Informatics (ICACCI, 2014
International Conference on, pages 863–867. IEEE.
Guruji, A. K., Agarwal, H., and Parsediya, D. (2016). Time-
efficient a* algorithm for robot path planning. Proce-
dia Technology, 23:144–149.
Han, J. and Seo, Y. (2017). Mobile robot path planning with
surrounding point set and path improvement. Applied
Soft Computing, 57:35–47.
Hu, Y. and Yang, S. X. (2004). A knowledge based
genetic algorithm for path planning of a mobile
robot. In Robotics and Automation, 2004. Proceed-
ings. ICRA’04. 2004 IEEE International Conference
on, volume 5, pages 4350–4355. IEEE.
Huang, H.-C. and Tsai, C.-C. (2011). Global path planning
for autonomous robot navigation using hybrid meta-
heuristic ga-pso algorithm. In SICE Annual Confer-
ence (SICE), 2011 Proceedings of, pages 1338–1343.
IEEE.
Jan, G. E., Chang, K. Y., and Parberry, I. (2008).
Optimal path planning for mobile robot naviga-
tion. IEEE/ASME Transactions on mechatronics,
13(4):451–460.
Kala, R., Shukla, A., and Tiwari, R. (2011). Robotic
path planning in static environment using hierarchical
multi-neuron heuristic search and probability based
fitness. Neurocomputing, 74(14-15):2314–2335.
Lamini, C., Benhlima, S., and Elbekri, A. (2018). Ge-
netic algorithm based approach for autonomous mo-
bile robot path planning. Procedia Computer Science,
127:180–189.
LaValle, S. M. (2006). Planning algorithms. Cambridge
university press.
Leena, N. and Saju, K. (2014). A survey on path plan-
ning techniques for autonomous mobile robots. IOSR
Journal of Mechanical and Civil Engineering (IOSR-
JMCE), 8:76–79.
Liu, H., Xu, B., Lu, D., and Zhang, G. (2018). A path plan-
ning approach for crowd evacuation in buildings based
on improved artificial bee colony algorithm. Applied
Soft Computing.
Mac, T. T., Copot, C., Tran, D. T., and De Keyser, R. (2016).
Heuristic approaches in robot path planning: A sur-
vey. Robotics and Autonomous Systems, 86:13–28.
Montiel, O., Orozco-Rosas, U., and Sep
´
ulveda, R. (2015).
Path planning for mobile robots using bacterial po-
tential field for avoiding static and dynamic obstacles.
Expert Systems with Applications, 42(12):5177–5191.
Rintanen, J. (2006). Introduction to automated plan-
ning. Lecture notes of the AI planning course, Albert-
Ludwigs-University Freiburg.
Shiltagh, N. A. and Jalal, L. D. (2013). Optimal path
planning for intelligent mobile robot navigation us-
ing modified particle swarm optimization. Interna-
tional Journal of Engineering and Advanced Technol-
ogy, 2(4):260–267.
Shum, A., Morris, K., and Khajepour, A. (2015). Direction-
dependent optimal path planning for autonomous ve-
hicles. Robotics and Autonomous Systems, 70:202–
214.
Song, W., LI, H.-x., and ZHANG, Y.-n. (2016). Path plan-
ning of mobile robot based on genetic bee colony al-
gorithm. DEStech Transactions on Computer Science
and Engineering, 1(cmee).
Victerpaul, P., Saravanan, D., Janakiraman, S., and Pradeep,
J. (2017). Path planning of autonomous mobile robots:
A survey and comparison. Journal of Advanced Re-
search in Dynamical and Control Systems, 9:1535–
1565.
Wang, W., Zuo, L., and Xu, X. (2018). A learning-based
multi-rrt approach for robot path planning in narrow
passages. Journal of Intelligent & Robotic Systems,
90(1-2):81–100.
Zhang, Y., Gong, D.-w., and Zhang, J.-h. (2013). Robot
path planning in uncertain environment using multi-
objective particle swarm optimization. Neurocomput-
ing, 103:172–185.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
166
