
GNSS Positioning using Android Smartphone
Paolo Dabove, Vincenzo Di Pietra, Shady Hatem and Marco Piras
Department of Environment, Land, and Infrastructure Engineering, Politecnico di Torino,
C.so Duca degli Abruzzi 24, Turin, Italy
Keywords: Smartphone Positioning, GNSS, Android, Raw Measurements.
Abstract: The possibility to manage pseudorange and carrier-phase measurements from the Global Navigation Satellite
System (GNSS) chipset installed on smartphones and tablets with an Android operating system has changed
the concept of precise positioning with portable devices. The goal of this work is to compare the positioning
performances obtained with a smartphone and an external mass-market GNSS receiver both in real-time and
post-processing. The attention is also focused not only on the accuracy and precision, but also on the
possibility to determine the phase ambiguity values as integer (fixed positioning) that it is still a challenging
aspect for mass-market devices: if the mass-market receiver provides good results under all points of view
both for real-time and post-processing solutions (with precisions and accuracies of about 5 cm and 1 cm,
respectively), the smartphone has a bad behaviour (order of magnitude of some meters) due to the noise of its
measurements.
1 INTRODUCTION
Nowadays, smartphone technology is widespread
almost all people have one, not only used for call
others but also to guide them to some places and share
their locations in this context navigation systems have
become important part of everyday life.
GNSS based systems do not work in locations
where no GNSS signals can be received or in very
noisy environments, as in urban canyons (Masiero et
al., 2014): in all other places GNSS equipment can
offer an interesting solution for positioning,
navigation purposes or location in many places, such
as at university, in shopping malls, at train stations or
in large buildings (Federici et al., 2013).
In order to devise a successful outdoor navigation
solution, it is important to understand the quality and
accuracy of smartphones’ integrated sensors
(Zandbergen and Barbeau, 2011) while using
smartphone can provide good accuracy using assisted
GNSS (A-GNSS) systems, which can obtain the
required data from other GNSS permanent stations or
from internet connected server (Van Diggelen, 2009).
In both cases, it is mandatory to have the access to
GNSS raw measurements, as pseudoranges and
carrier-phase.
Until 2016 was not possible to have GNSS raw
data by mobile platform likewise high level API such
as iOS and Android which not allowed to access raw
data, but it was only possible to get raw
measurements from GNSS receivers dedicated only
for precise positioning (also single frequency).
However, with the release of Android Nougat
operating system (version 7.x or 8.x) some smart
devices allow the direct access to raw data and PVT
solution by acquiring pseudoranges and carrier-phase
from the chipset inside (Humphreys et al., 2016;
Zhang et al., 2018). Many other sensors are available
today on smartphones: most of them are related to
internal applications (e.g., proximity sensor, light
sensors) while others (e.g., inertial measurements unit
and camera) can be used for estimating a positioning
solution, but these aspects are out of the scope of this
paper.
Many studies are already done about positioning
solutions (Lachapelle et al., 2018; Zhang et al., 2018),
considering GPS/GNSS chipset and a European task
force have been activated in last years (https://www.
gsa.europa.eu/gnss-raw-measurements-task-force).
However, this paper presents the performances of
one smartphone (Huawei P10+) with Android
operating system compared to those obtainable with
another mass-market GNSS receiver (u-blox NEO
M8T), with the same characteristics of the
smartphone’s one, equipped with a patch antenna.
Many tests have been conducted in outdoor,
considering static and kinematic positioning, in
different conditions in terms of multipath effects and
Dabove, P., Di Pietra, V., Hatem, S. and Piras, M.
GNSS Positioning using Android Smartphone.
DOI: 10.5220/0007764801350142
In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2019), pages 135-142
ISBN: 978-989-758-371-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
135
number of visible satellites, using different software
for obtaining a post-processed positioning solutions.
After this introduction, a section related to the GNSS
positioning techniques available with smartphone
technology is provided. Then, the test cases and the
obtained results will be shown before some comments
and conclusions.
2 GNSS POSITIONING
TECHNIQUE WITH
SMARTPHONE
Only measuring the distances (pseudoranges)
between the user’s receiver and the position of at least
four satellites of the same constellation it is possible
to obtain a GNSS solution (Kaplan and Hegarty,
2005; Misra and Enge, 2006). The distance between
receiver and satellite is proportional to the signal
propagation time, if the transmitter and receiver clock
are perfectly synchronized. Of course, this does not
happen so the satellites’ and receivers’ clock biases
have to be estimated. In addition, other effects affect
the GNSS signals such as thermal noise,
uncompensated biases, multipath, and other
propagation effects. But the biggest error source is
given by the atmospheric propagation effects, in
particular the ionospheric and tropospheric delays
and ionospheric scintillations. If these biases are not
estimated or removed, the positioning error can be
greater than 30 m, making the GNSS positioning
useless for most of applications. As widely described
in literature, two main approaches can be adopted: the
post-processing or real-time techniques. This last
kind of method can be used if the accuracy required
is less than 5 cm (Dabove and Manzino, 2014), a
condition that is not generally requested and
obtainable if smart devices are considered (Fissore et
al., 2018; Dabove and Di Pietra, 2019).
The post-processing approach is generally
followed when a high level of accuracy is required or
when it is not possible to estimate some biases in real
time in an accurate way, exploiting for example the
use of two or more frequencies. This generally
happens considering the typical receivers used for
positioning purposes, such as geodetic or GIS
(Hoffmann-Wellenhof et al., 2008). Starting from last
decade, with the advent of mass-market receivers,
GNSS positioning has become more common
because the cost of GNSS receivers and antennas
have been decreased up to few US dollars.
Most of GNSS receivers available inside
smartphones are not multi-frequency (Robustelli et
al., 2019) but only single-frequency receivers, so only
measurements referred to the L1 frequency (L1 band)
can be exploited. In that case, it is not possible to
apply the most common differencing methods, also
known as double or triple differences (Hoffmann-
Wellenhof et al., 2008 ; Dabove et al., 2014), nor to
combine different observations (Cina et al. 2014).
Therefore, the only two possible solutions are the
single difference approach (considering one receiver
and a reference satellite) or modeling the GNSS
biases (e.g. iono and tropospheric delays, satellite and
receiver clock drifts) using mathematical models.
3 TEST SETUP
Many tests were done both in static and kinematic
conditions. The smartphone considered in these tests
is the Huawei P10+ which characteristics are
summarized in Table 1 with those of the u-blox NEO
M8T GNSS receiver, used as comparison.
Table 1: The instruments used in these tests.
Receiver
Huawei
P10+
u-blox NEO M8T
Image
Constellation
GPS
GPS + GLONASS +
BeiDou
Observations
C/A, L1,
SNR
C/A, L1, SNR
Cost
€ 300
€ 70
Weight [g]
145
8.1
Dimension
[mm]
145.3 x
69.3 x 7
40 x 18 x 8
Two different test sites have been investigated,
considering different environmental conditions: the
first test-site is the roof of the building’s office at
Politecnico di Torino, an area where the noise and
multipath effects are very high and the satellite
visibility is reduced due to the presence of other
buildings.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
136

Figure 1: The two test sites: the place that represent the
noisy environment (left, site A) and an undisturbed place
(right, site C).
The second one is an undisturbed site,
characterized by the absence of reflective surfaces,
electromagnetic disturbances and with optimal
conditions for tracking satellites (e.g. no
obstructions). These two sites, namely A and C
(Figure 1), respectively, represent the two main
conditions where a user works or tries to perform
positioning activities.
The u-blox receiver needs a software installed in
an external device for providing both the raw-
measurements and the real-time results. There are
many software available today on the market (e.g.,
those proposed in Kaselimi et al., 2018) that can
exploit the owner binary format (.ubx) for obtaining
RINEX files or real-time solutions. In this work, we
have used the RTKLIB suite (2.4.3) both for
extracting the raw data, for converting them in
RINEX (using the RTKCONV tool), and for
performing the post-processing (using the RTKPOST
tool) and real-time (using the RTKNAVI tool)
solutions. This software is particularly interesting
because it is an open source program package for
standard and precise positioning with GNSS many
constellations (GPS, GLONASS, Galileo, BeiDou,
QZSS, SBAS) and supports various positioning
modes with GNSS for both real‐time and post‐
processing approaches: Single, DGPS/DGNSS,
Kinematic, Static, Moving‐Baseline, Fixed, PPP‐
Kinematic, PPP‐Static and PPP‐Fixed. It is also
includes Graphical User Interface (GUI) and
Command-line User Interface (CUI) with many
library functions, related to Satellite and navigation
system functions, stream data input and output
functions, standard, real-time and post‐processing
positioning. This software, as already described in
bibliography (Takasu and Yasuda, 2009) is expressly
affecting because allows to manage the stream data
coming from a network of permanent stations that
uses NTRIP authentication. In addition RTKLIB
allows to fix the phase ambiguities as integer values,
using the modified LAMBDA method (Chang et al.,
2005), an interesting technique especially for real-
time applications where computational speed is
crucial. Indeed, the modified LAMBDA
(MLAMBDA) method reduces computational
complexity of the “classical” LAMBDA (Teunissen
1995).
The same software is not useful for the
smartphone because is not still available as an app.
Thus, in this case the GEO++ RINEX app is
considered, in order help to get the raw measurements
and to store these into a RINEX file.
4 RESULTS
As previously said, different test have been conducted
considering both static and kinematic approaches. In
this section the main interesting results are shown,
considering also the two different software used for
the post-processing analysis.
4.1 Positioning Performances
Considering Different
Environments
Firstly, the behaviour of GNSS internal chipset has
been analysed considering a post-processing
approach. The permanent station, used as master
station, is TORI (Turin): this permanent station, that
belongs to the EUREF permanent GNSS network
(www.epncb.oma.be), is composed by a multi-
frequency and multi-constellation receiver and a
choke ring antenna and is about 250m far from the
test sites.
The smartphone has been positioned in two
different test sites previously cited, which coordinates
are known. These first analyses are made considering
the RTKLIB software and different positioning
techniques: single point positioning (SPP), static and
kinematic. Moreover, different session length have
been considered (10, 30 and 60 mins) in order to
verify if there is a correlation between the length of
the session and the precision of the solutions. The
results are presented in Table 2. All solutions are
obtained applying atmospheric corrections:
Saastamoinen model was used to mitigate the
tropospheric delay using dry and wet components and
Klobuchar for the ionospheric one, setting the cut off
elevation as 10°. All results are obtained fixing the
phase ambiguities according to the “Fix and hold”
method (Dabove and Manzino, 2014).
GNSS Positioning using Android Smartphone
137
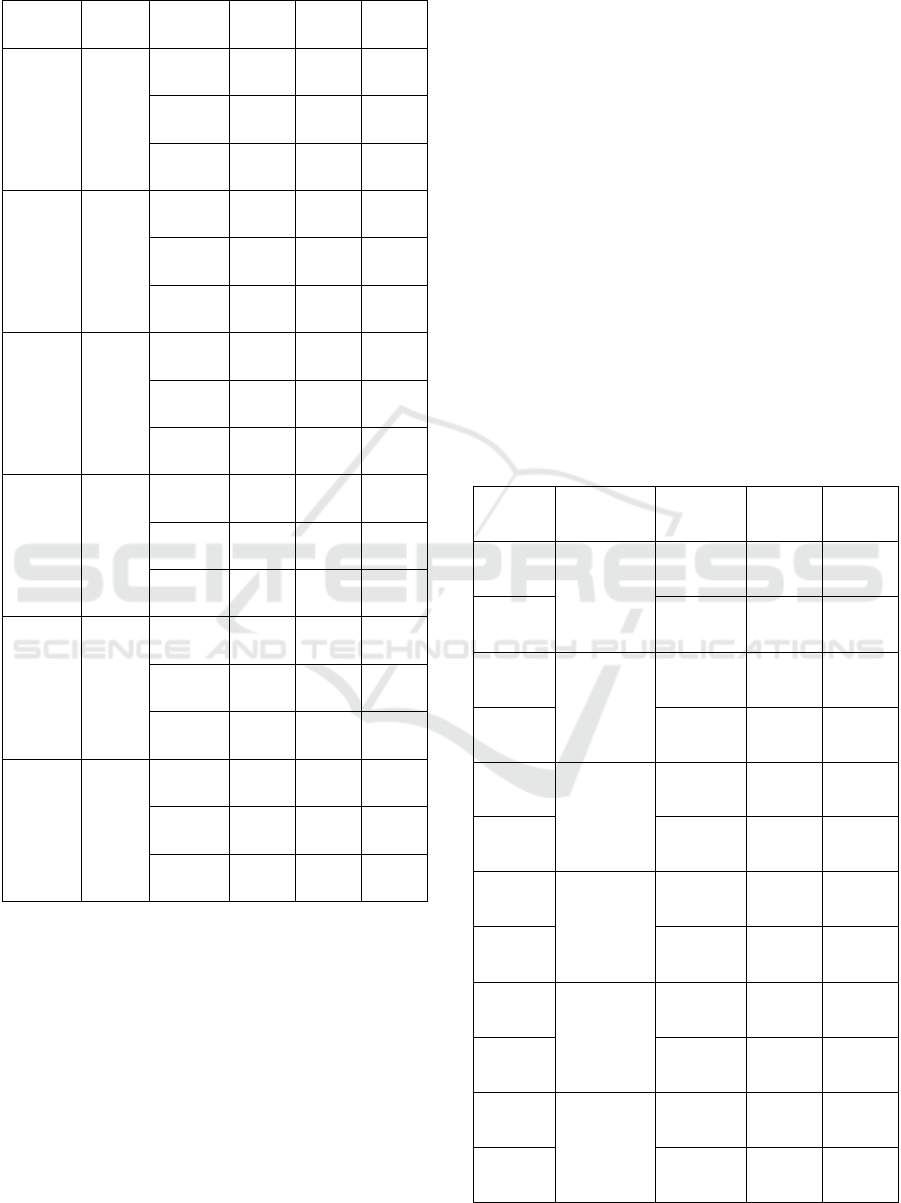
Table 2: Precision of the positioning results using Huawei
P10+.
Location
(Min)
Method
E(m)
N(m)
U(m)
A
10
Static
8.991
10.462
10.933
Kin
23.867
18.414
36.343
SPP
27.983
20.626
42.507
C
10
Static
0.048
0.142
0.118
Kin
5.505
4.821
9.373
SPP
6.418
5.791
11.126
A
30
Static
3.915
6.844
10.131
Kin
22.475
16.146
56.759
SPP
33.267
24.791
71.716
C
30
Static
0.864
0.736
1.817
Kin
12.938
9.756
15.376
SPP
15.932
12.784
19.766
A
60
Static
35.827
16.135
21.665
Kin
53.085
33.152
80.066
SPP
58.724
39.226
88.549
C
60
Static
0.959
0.445
2.071
Kin
47.321
33.935
39.535
SPP
50.047
35.247
39.707
After analysing the results in Table 2, it is
possible to see how the precision obtained
considering the location A is more noisier than those
in C, as a result of multipath effects, due to reflective
surfaces and a limited satellites visibility. At the same
time, it seems that there is no correlation between the
session length and the precision, that generally
happens if geodetic or GIS receivers are considered:
this is due to the quality of the raw measurements, that
are more noisier than those obtainable with other
mass-market receivers, such as the u-blox one
(Dabove and Di Pietra, 2019).
It is important to underline that the kinematic
solutions are obtained considering the smartphone
settled in the fixed place (as static survey) with the
only difference that the solutions are obtained using a
dynamic motion in the Kalman filter algorithm. By
Analysing these results, it is possible to affirm that
this kind of method is not feasible for these
instruments, so it is neglected for further analyses.
In order to verify the repeatability of these results,
another dataset has been collected in the same places,
with the same techniques. Considering the results
obtained with RTKLIB (Table 3), it seems that there
are no differences with those obtained in the other
data collection.
This last dataset has been processed with the LGO
8.3 software, in order to have independent solutions.
As shown in Table 4, it is clear that the results are
generally slightly better than those obtained with
RTKLIB software, even if the behaviour in terms of
session length and environmental conditions is the
same.
Table 3: Results obtained with RTKLIB software,
considering different session lengths and locations.
Method
Location
E(m)
N(m)
U(m)
Static
10min
site A
8.991
10.462
10.933
Spp
27.983
20.626
42.507
Static
10min
site C
0.048
0.142
0.118
SPP
6.418
5.791
11.126
Static
30 min
site A
3.915
6.844
10.131
SPP
33.267
24.791
71.716
Static
30 min
site C
0.864
0.736
1.817
SSP
15.932
12.784
19.766
Static
60 min
site A
35.827
16.135
21.665
SPP
58.724
39.226
88.549
Static
60 min
site C
0.959
0.445
2.071
SPP
50.047
35.247
39.707
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
138
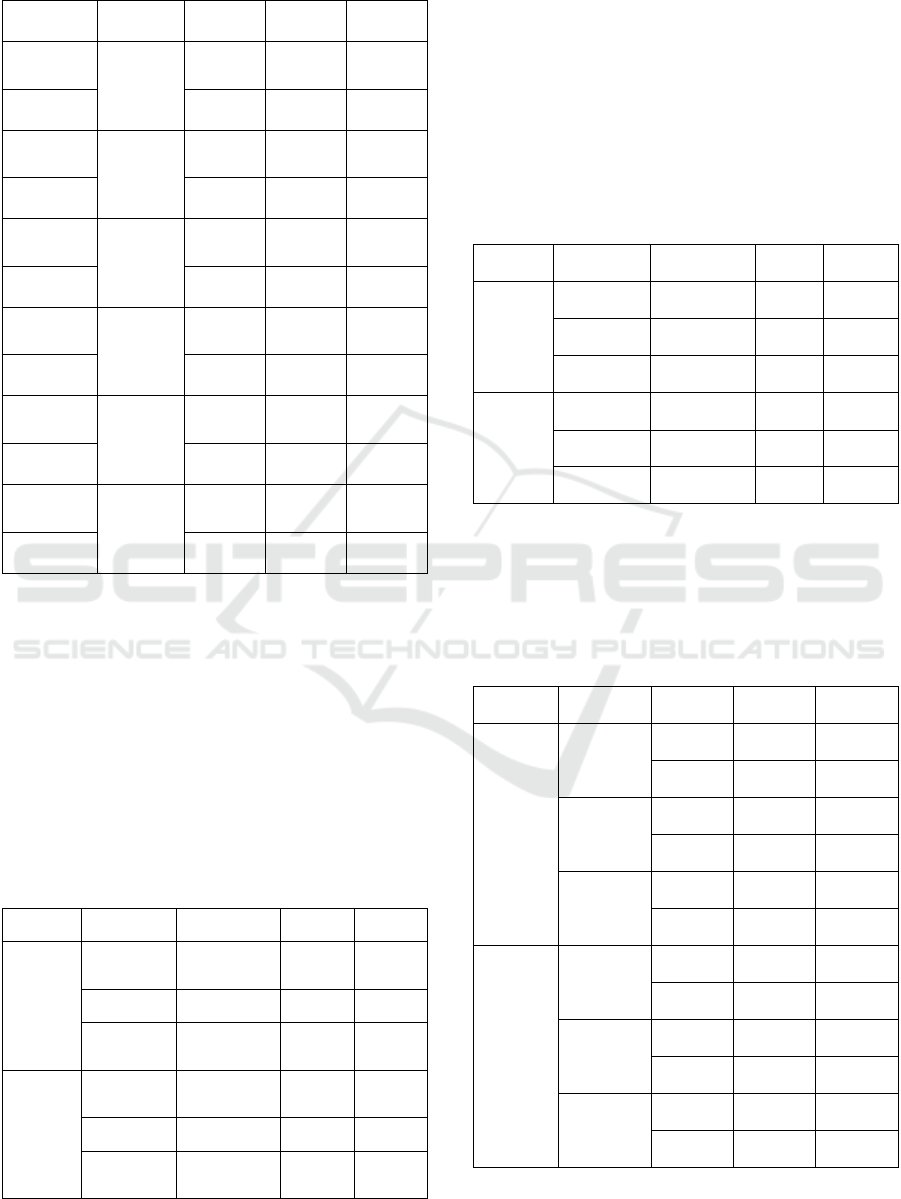
Table 4: Results obtained with LGO software, considering
different session lengths and locations.
Method
Location
E(m)
N(m)
U(m)
Static
10min
site A
1.246
0.955
1.346
SPP
0.782
0.668
0.527
Static
10min
site C
0.024
0.016
0.034
SPP
0.492
0.321
0.593
Static
30 min
site A
34.991
33.448
81.132
SPP
3.071
1.222
2.81
Static
30 min
site C
0.058
0.013
0.044
SSP
0.908
0.443
0.794
Static
60 min
site A
156.024
303.553
287.713
SPP
5.425
2.696
4.748
Static
60 min
site C
1.246
0.955
1.346
SPP
0.782
0.668
0.527
4.2 Comparison between U-blox and
Smartphone Results
In order to compare the results obtained with the
smartphone and those with the other low-cost receiver
(u-blox), a dedicated test has been performed. Both
receivers have been settled on the site C, close to each
other, in order to verify the precision in the best
possible conditions (good satellite visibility, no
obstacles or electromagnetic disturbances).
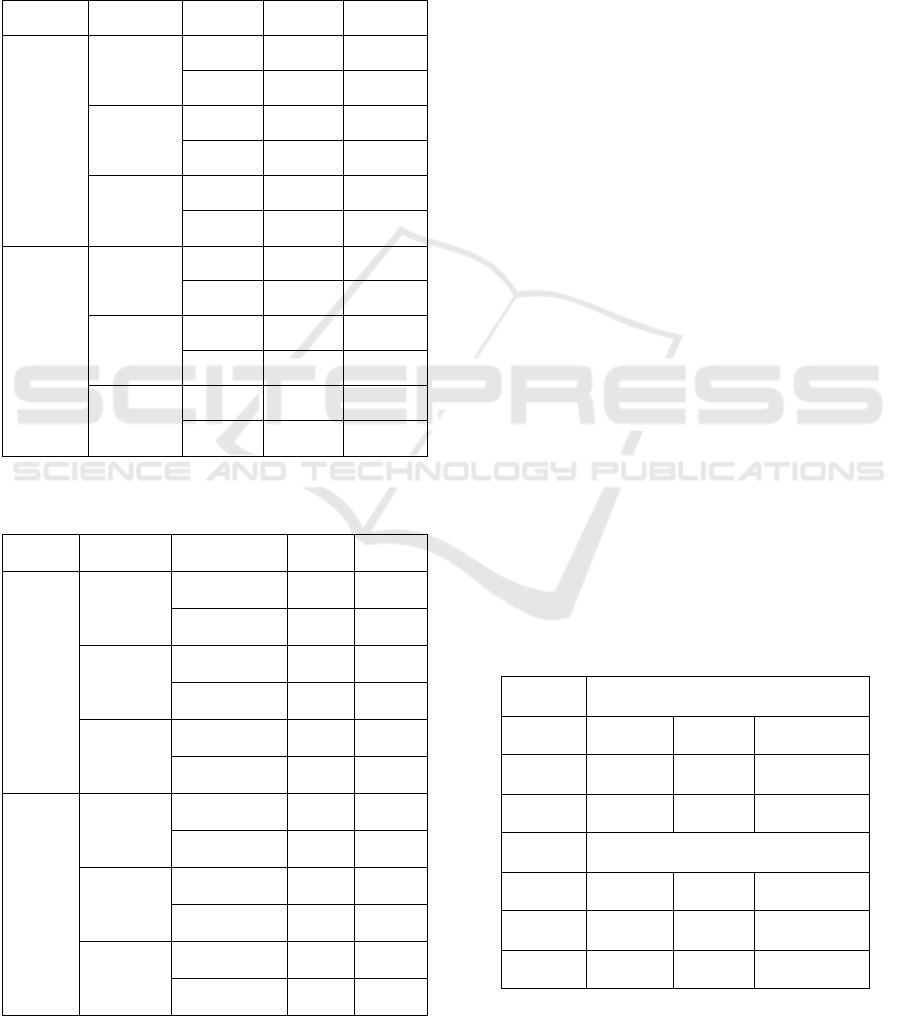
Table 5: Positioning results using Huawei P10+& u-blox,
for a session length of 30 mins.
Device
Method
E (m)
N(m)
U(m)
Huawei
Static
2.910
0.948
16.599
Kinematic
16.585
12.393
74.289
SPP
16.646
12.991
74.778
U-blox
Static
0.001
0.001
0.006
Kinematic
0.618
0.462
1.079
SPP
3.154
2.003
11.063
Two different measurement campaigns have been
considered of 30 mins and 10 mins, respectively. In
the last case (Table 6) seems that the smartphone
performances are better than those obtainable with u-
blox but it is a strange behaviour, that it is not
confirmed if the longer session is considered (Table
5). This strange result is due to the noisy of the raw
GNSS measurements collected by the smartphone:
generally, it is really difficult to be able to filter and
de-noise these observations.
Table 6: Positioning results using Huawei P10+& u-blox,
for a session length of 10 mins.
Device
Method
E (m)
N(m)
U(m)
Huawei
Static
0.070
0.111
0.507
Kinematic
7.461
7.287
15.181
SPP
8.197
6.913
14.763
U-blox
Static
0.140
0.233
0.717
Kinematic
7.740
9.529
9.424
SPP
3.016
2.31
6.274
Particularly interesting is the analysis of precision
and accuracy obtainable: Table 7, Table 8 and Table
9 show these values for session length of about 1
hour, 30 mins and 10 mins.
Table 7: Accuracy (upper line for each row) and precision
(lower line) results.
Device
Method
E (m)
N (m)
U(m)
Huawei
Static
0.16
-0.177
-1.602
0.28
1.313
2.055
Kinematic
-0.015
-3.842
-7.398
10.001
64.420
57.218
SPP
0.272
-1.043
-7.887
10.909
66.828
58.167
U-blox
Static
-0.009
-0.072
-0.011
0.000
0.003
0.002
Kinematic
-0.009
-0.073
-0.011
0.015
0.04
0.065
SPP
-0.009
-0.073
-0.011
0.015
0.04
0.065
GNSS Positioning using Android Smartphone
139
According to the Table 5 results are accurate more
than precise for smartphone while u-blox provides
better results in both concerning accuracy and
precision during the same time.
For 30 minutes session the results of smartphone
are better than previous session although it was
shorter as shown in Table 8.
Table 8: Accuracy (upper line for each row) and precision
(lower line) results considering a session length of 10 mins.
Device
Method
E(m)
N(m)
U(m)
Huawei
Static
0.283
-0.222
-0.295
0.242
0.488
1.124
Kinematic
0.253
-0.198
-0.223
4.205
7.384
18.997
SPP
0.253
-0.198
-4.025
4.671
8.569
19.18
U-blox
Static
-0.017
-0.076
-0.105
0.004
0.008
0.007
Kinematic
0.098
0.010
0.058
0.194
0.205
0.357
SPP
1.249
2.77
-0.020
1.921
5.119
4.818
Table 9: Accuracy (upper line for each row) and precision
(lower line) results considering a session length of 10 mins.
Device
Method
E(m)
N(m)
U(m)
Huawei
Static
0.437
0.01
0.402
0.189
0.783
0.797
Kinematic
0.529
0.287
0.510
3.584
7.795
14.788
SPP
1.143
0.767
-2.597
4.056
9.071
15.447
U-blox
Static
-0.254
-0.947
0.970
0.385
0.195
1.404
Kinematic
-0.262
-0.979
0.678
4.630
6.600
19.21
SPP
-0.248
-0.922
-3.437
4.910
6.746
19.134
4.3 Real Time Kinematic Positioning
In case real time positioning, it is mandatory to have
real time corrections broadcasted by one or more
permanent station. In this work the SPIN GNSS
Network (https://www.spingnss.it/spiderweb/frmIn
dex.aspx) has been used, considering the Virtual
Reference Station (VRS) correction. For using both
u-blox and smartphone contemporarily, it is
necessary to have the GNSS Internet Radio software
(https://igs.bkg.bund.de/ntrip/download) for
obtaining the differential corrections near to the test
site. This last software allows us to save the
corrections in a text file, in order to provide both for
the u-blox and smartphone. Then, the RTKLIB
software, with the RTKNAVI tool, has used again for
performing the NRTK positioning.
Two different measurement campaigns have been
considered, with a session length of 10 and 5 minutes
respectively. This choice is due to the time interval
that a generic user can wait for obtaining a positioning
accuracy of about 5 cm, as described in Dabove and
Manzino (2014). Only the test site C (open-sky area)
is considered because, as it is possible to see in Table
11, no epochs with phase ambiguities fixed as integer
value (Teunissen and Verhagen, 2009) has been
obtained using the smartphone. This does not happen
in case the u-blox receiver is considered: as a result ,
in 93% of solutions the phase ambiguities are fixed as
integer value and the accuracies are about 3-4 cm both
for 2D and up component. Analysing the float
solutions (float means that the phase ambiguities are
non defined as integer values but are real numbers),
the u-blox receiver provides precisions comparable to
the fixed solutions while the accuracy is around 40
cm for 2D and up components.
Table 10: Real time positioning results using u-blox
receiver and a session length of 10 mins.
Fix
83%
E(m)
N(m)
U(m)
Precision
0.004
0.005
0.013
Accuracy
0.034
0.012
0.041
Float
17%
E(m)
N(m)
U(m)
Precision
0.014
0.007
0.042
Accuracy
0.293
0.359
0.391
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
140

Table 11: Real time positioning results using Huawei
receiver and a session length of 5 mins.
Fix
0%
E(m)
N(m)
U(m)
Precision
N/A
N/A
N/A
Accuracy
N/A
N/A
N/A
Float
100%
E(m)
N(m)
U(m)
Precision
3.089
2.677
4.888
Accuracy
4.822
3.184
5.516
The behaviour of smartphone results are
completely different because the accuracies are
between 3.18m and 5.52m while the precisions are
from 2.67m up to 4.88. This means that, considering
also previous studies (Dabove and Di Pietra, 2019)
not all smartphone GNSS receivers provide the same
results because the raw observations have different
conditions of noise and accuracy. It could be
interesting to perform the same tests in the future
considering new GNSS chipset and the employment
of new GNSS constellations and signals.
5 CONCLUSIONS
Until a few years ago, low cost sensors and smart
technologies were considered as “mass-market”
solutions, able to estimate a very approximate
positioning and adapt only for navigation or
geolocalization.
Nowadays, new technologies, new user
requirements, new platforms (e.g., Android 8.0) and
new challenges have allowed to bring in our hands a
very powerful “geomatics” tool. The modern
smartphones or mass-market receivers are able to
reach very impressive quality, both in static or
kinematic positioning, widening the doors to an
enormous quantity of applications and research fields.
UAV, pedestrian positioning, unmanned ground
vehicle, object tracking, security issues, are only a
short list of possible domain where the quality
reachable with these kind of sensors could be
exhaustive.
The improvement is also allowed by the quality of
the GNSS signals, the modern infrastructure
dedicated to GNSS positioning (e.g. CORS, network,
NRTK, etc.) and by the increasing interesting due to
user communities and big players about the use of
these technologies for high quality positioning.
In this paper, it is strongly demonstrated that the
quality of the signals collected using these
technologies is completely able to reach a good
positioning. Surely, combining the sensors with a
better external antenna, the performances could be
better and other possible applications could be
founded. We have presented the results obtained with
only one smartphone: this is not expected to be the
same concerning the performance of all smartphones,
especially because in 2018 the first smartphone with
dual-frequency multi constellation GNSS receiver
has been released (Xiaomi Mi8). This study wants to
show how different results can be the obtained in
function of different positioning techniques, that can
be chosen according to the precision and accuracy
requested. Future steps will be to test the
performances of other smartphones with other GNSS
chipset installed inside in order to provide a deep
overview about possible results obtainable today.
Certainly, this will be done considering also the new
instruments released on the market in these few last
months.
If few years ago, smart technologies were only a
tools for calling and chatting, today these tools are
becoming a potential tools even for geomatics
applications. In the next future, new constellations
and signals promise us an improvement of the quality
in terms of precision and performance. Therefore, this
is only the first step of this new positioning
revolution.
REFERENCES
Chang, X.W., Yang, X., Zhou, T. 2005. MLAMBDA: A
modified LAMBDA method for integer least-squares
estimation. J. Geod. 2005, 79, 552–565.
Cina A., Dabove P., Manzino A.M., Piras M. 2014.
Augmented Positioning with CORSs Network Services
Using GNSS Mass-market Receivers. In: 2014
IEEE/ION Position, Location and Navigation
Symposium (PLANS), Monterey (CA - U.S.A.), May
5-8. pp. 359-366.
Dabove, P., Di Pietra, V. 2019. Towards high accuracy
GNSS real-time positioning with smartphones. Adv.
Space Res. https://doi.org/10.1016/j.asr.2018.08.025
Dabove P., Manzino A.M., Taglioretti C. 2014. GNSS
network products for post-processing positioning:
limitations and peculiarities. Applied Geomatics, Vol.
6, issue 1, pp.27-36.
Federici, B., Giacomelli, D., Sguerso, D., Vitti, A., &
Zatelli, P. 2013. A web processing service for GNSS
realistic planning. Applied Geomatics, 5(1), 45-57.
Fissore F., Masiero A., Piragnolo M., Pirotti F., Guarnieri
A., Vettore A. 2018. Towards Surveying with a
Smartphone. In: Cefalo R., Zieliński J., Barbarella M.
GNSS Positioning using Android Smartphone
141

(eds) New Advanced GNSS and 3D Spatial
Techniques. Lecture Notes in Geoinformation and
Cartography. Springer, Cham.
Hoffmann-Wellenhof B., Lichtenegger H., Wasle E. 2008.
GNSS - GPS, GLONASS, Galileo and more.
NewYork : SpringerWien.
Humphreys, T. E., Murrian, M., van Diggelen, F.,
Podshivalov, S., & Pesyna, K. M. (2016, April). On the
feasibility of cm-accurate positioning via a
smartphone's antenna and GNSS chip. In 2016
IEEE/ION Position, Location and Navigation
Symposium (PLANS) (pp. 232-242). IEEE.
Kaplan, E., and Hegarty, C. 2005. Understanding GPS:
principles and applications. Artech house.
Kaselimi, M., Doulamis, N., Delikaraoglou, D.,
Protopapadakis, E. 2018. GNSSGET and GNSSPLOT
Platforms-Matlab GUIs for Retrieving GNSS Products
and Visualizing GNSS Solutions. In VISIGRAPP (5:
VISAPP) (pp. 626-633).
Lachapelle, G., Gratton, P., Horrelt, J., Lemieux, E.,
Broumandan, A. 2018. Evaluation of a Low Cost Hand
Held Unit with GNSS Raw Data Capability and
Comparison with an Android Smartphone. Sensors,
18(12), 4185.
Masiero, A., Guarnieri, A., Pirotti, F., Vettore, A., 2014. A
particle filter for smartphone-based indoor pedestrian
navigation. Micromachines 5(4):1012–1033.
https://doi.org/10.3390/mi5041012
Misra, P., and Enge, P. 2006. Global Positioning System:
signals, measurements and performance second edition.
Massachusetts: Ganga-Jamuna Press.
Robustelli, U., Baiocchi, V., Pugliano, G. 2019.
Assessment of Dual Frequency GNSS Observations
from a Xiaomi Mi 8 Android Smartphone and Position-
ing Performance Analysis. Electronics, 8(1), 91.
Takasu, T. and Yasuda, A. 2009. Development of the low-
cost RTK-GPS receiver with an open source program
package RTKLIB. International Symposium on
GPS/GNSS, International Convention Center Jeju,
Korea, November 4-6, 2009.
Teunissen, P.J.G. The least-squares ambiguity
decorrelation adjustment: A method for fast GPS
ambiguity estimation. J. Geod. 1995, 70, 65–82.
Teunissen, P. J. G., Verhagen, S., 2009. GNSS carrier phase
ambiguity resolution: challenges and open problems.
In: Observing our changing Earth, pp. 785-792.
Springer, Berlin, Heidelberg. https://doi.org/10.1007/
978-3-540-85426-5_90.
Van Diggelen, F. S. T. 2009. A-GPS: Assisted GPS, GNSS,
and SBAS. Artech House.
Zandbergen, P. A., Barbeau, S. J., 2011. Positional
accuracy of assisted GPS data from high-sensitivity
GPS-enabled mobile phones. The Journal of
Navigation, 64(3): 381-399. https://doi.org/10.1017/S0
373463311000051.
Zhang, X., Tao, X., Zhu, F., Shi, X., & Wang, F. 2018.
Quality assessment of GNSS observations from an
Android N smartphone and positioning performance
analysis using time-differenced filtering approach. Gps
Solutions, 22(3), 70.
Zhang, K., Jiao, F., Li, J. 2018. The Assessment of GNSS
Measurements from Android Smartphones. In China
Satellite Navigation Conference (pp. 147-157).
Springer, Singapore.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
142
