
Workflows for Virtual Reality Visualisation and Navigation
Scenarios in Earth Sciences
Krokos Mel
1,3 a
, Bonali Fabio Luca
2 b
,
Vitello Fabio
3 c
,
Antoniou Varvara
4 d
,
Becciani Ugo
3
,
Russo Elena
2 e
,
Marchese Fabio
2 f
,
Fallati Luca
2 g
, Nomikou Paraskevi
4 h
,
Kearl Martin
1 i
,
Sciacca Eva
3 j
and Malcolm Whitworth
5 k
1
University of Portsmouth, School of Creative Technologies, Eldon Building, Winston Churchill Ave, Portsmouth,
PO1 2UP, U.K
2
University of Milano-Bicocca, Department of Earth and Environmental Sciences, Piazza della Scienza 4 – Ed. U04,
20126 Milan, Italy
3
Italian National Institute for Astrophysics (INAF), Astrophysical Observatory of Catania, Italy
4
National and Kapodistrian University of Athens, Department of Geology and Geoenvironment,
Panepistimioupoli Zografou, 15784 Athens, Greece
5
University of Portsmouth, School of Earth and Environmental Sciences, Burnaby Road, Portsmouth, PO1 3QL, U.K
{fabio.vitello, ugo.becciani,eva.sciacca}@inaf.it, {vantoniou, evinom}@geol.uoa.gr,
{e.russo11, l.fallati}@campus.unimib.it
Keywords: Virtual Reality, Workflows, Visual Exploration and Discovery, Video Game Engines, Structure from Motion,
Digital Terrain and Bathymetric Models.
Abstract: This paper presents generic guidelines for constructing customised workflows exploiting game engine
technologies aimed at allowing scientists to navigate and interact with their own virtual environments. We
have deployed Unity which is a cross-platform game engine freely available for educational and research
purposes. Our guidelines are applicable to both onshore and offshore areas (either separately or even merged
together) reconstructed from a variety of input datasets such as digital terrains, bathymetric and structure from
motion models, and starting from either freely available sources or ad-hoc produced datasets. The deployed
datasets are characterised by a wide range of resolutions, ranging from a couple of hundreds of meters down
to single centimetres. We outline realisations of workflows creating virtual scenes starting not only from
digital elevation models, but also real 3D models as derived from structure from motion techniques e.g. in the
form of OBJ or COLLADA. Our guidelines can be knowledge transferred to other scientific domains to
support virtual reality exploration, e.g. 3D models in archaeology or digital elevation models in astroplanetary
sciences.
1 INTRODUCTION
Scientific visualisation can be an important aid for
effective analysis and communication of complex
a
https://orcid.org/0000-0001-5149-6091
b
https://orcid.org/0000-0003-3256-0793
c
https://orcid.org/0000-0003-2203-3797
d
https://orcid.org/0000-1111-2222-3333
e
https://orcid.org/0000-0001-7744-1224
f
https://orcid.org/0000-0001-8384-3019
g
https://orcid.org/0000-0002-5816-6316
h
https://orcid.org/0000-0001-8842-9730
i
https://orcid.org/0000-0003-2016-7601
j
https://orcid.org/0000-0002-5574-2787
k
https://orcid.org/0000-0003-3702-9694
information that may be otherwise difficult to convey
(Vitello et al., 2018, Dykes et al 2018). Visualisation
is often a fundamental part of the research process,
used for understanding, interpreting and exploring,
Mel, K., Luca, B., Fabio, V., Varvara, A., Ugo, B., Elena, R., Fabio, M., Luca, F., Paraskevi, N., Martin, K., Eva, S. and Whitworth, M.
Workflows for Virtual Reality Visualisation and Navigation Scenarios in Earth Sciences.
DOI: 10.5220/0007765302970304
In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2019), pages 297-304
ISBN: 978-989-758-371-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
297

and it can be helpful in guiding the direction of
research, from fine-tuning individual parameters to
posing entirely new research questions (Mitasova et
al., 2012; Sciacca et al., 2015). Furthermore, Virtual
reality (VR) can provide scientists with novel
navigation mechanisms for exploring outcrops in a
fully immersive way, offering the possibility to also
interact and collect measurements thus replicating
real world field activities (Fig. 1). The increasingly
lower costs of new VR devices make it possible to
easily access immersive VR environments in a variety
of contexts e.g. for outreach, research, training,
education and dissemination purposes (e.g. Nayyar et
al., 2018; Freina and Ott, 2015; Oprean et al., 2018).
Recently Gerloni et al. (2018) presented a VR
platform enabling the survey of geological
environments and assessment of related geo-hazards,
targeting a widespread audience, ranging from early
career scientists and civil planning organisations to
academics (e.g. students and teachers) and the society
at large for public outreach. The underlying idea is to
provide users with a holistic view of particular
geohazards by allowing exploration of specific
features from several points of view and at different
scales, to provide rich user experiences by realising
exploration scenarios that may not even be possible
to perform in the actual field in a real-world scenario.
Such VR platforms can be valuable tools in earth-
related sciences for developing skills in spatial
awareness thus aiding users to comprehend complex
geological features more easily. This paper reports
our experiences in creating virtual scenes from
different sources for reconstructing onshore and
offshore 3D environments.
Due to the rapidly evolving technological
advances there is currently an explosion in both the
amount and complexity of scientific datasets
manifested by several global Digital Elevation
Models (DEMs)/Digital Terrain Models (DTMs) that
are freely available (e.g. http://srtm.csi.cgiar.org/) but
also high-quality DTMs/DEMs/Digital Surface
Models (DSMs) coming from airborne acquisition
such as LIDAR (e.g. Liu, 2008) and Aerial Structure
from Motion approaches (ASfM) (e.g. Westoby et al.,
2012; Turner et al., 2012). Freely available DTMs
usually cover larger areas with a lower resolution
whereas LIDAR and ASfM approaches are generally
used to create smaller DTMs often characterised by
higher resolutions and rich textures. Using dedicated
Structure from Motion (SfM) software packages it is
also possible to directly reconstruct VR environments
a
http://paulbourke.net/dataformats/obj/
exploiting 3D model formats such as OBJ
a
or
COLLADA
b
.
Figure 1: Exploration of Icelandic volcanoes through VR.
Freely available offshore datasets are provided by
the General Bathymetric Chart of the Oceans
supporting pixel sizes of 250m (GEBCO -
https://www.gebco.net/) as well as EMODnet-
Bathymetry providing harmonised DTMs
(http://www.emodnet-bathymetry.eu/) for the
European sea regions with a pixel size of 100m.
To achieve fine scales (e.g. 1m) scientists
normally perform dedicated surveys based on
customised multibeam echosounders or even small
ROVs (Remote Operated Vehicles, e.g. Savini et al.,
2014).
In the following sections we introduce all
necessary steps to produce VR-enabled scenarios
exploiting modern game engines focusing on Unity,
which is the backbone upon which we have
developed two workflows for onshore and offshore
scenarios..
2 GAME ENGINES FOR VR
Game engines provide sets of tools to build video
games for consoles, mobile devices, and personal
computers providing a rendering module for 2D or
3D graphics, a physics engine or collision detection
(and collision response), sound, scripting, animation,
but also functionalities for artificial intelligence,
networking, streaming, memory management,
threading, localization support, scene graphs, and
may also include video support for cinematics. A
game engine provides mechanisms to control the
b
https://www.khronos.org/collada/
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
298

course of the game and is responsible for the visual
appearance of the game rules. Examples of game
engines available for free are Unity
(https://unity3d.com) from Unity Technologies,
CryEngine (https://www.cryengine.com/) from the
German development studio Crytek, and Unreal
(https://www.unrealengine.com/) from Epic Games.
A current overview and comparison of different game
engines can be found e.g. in O’Flanagan (2014) and
Lawson (2016). In the context of this paper, for the
creation of a virtual scenario applicable to Earth
Sciences, Unity was selected. This game engine is
best-suited for our development purposes considering
its cross-platform integration allowing less
development effort toward supporting different
platforms such as desktops (Windows, MacOS,
Linux), mobiles (Android, iOS) and webGL based
applications. Unity supports full object orientation in
C#, supporting modularity and extensibility to build
scalable assets that are easily expanded and sustained
long term. Furthermore, Unity supports several file
formats as used in industry-leading 3D applications
e.g. 3DS Max, or Blender. Finally, Unity is well
documented as it is supported by large numbers of
communities of software developers.
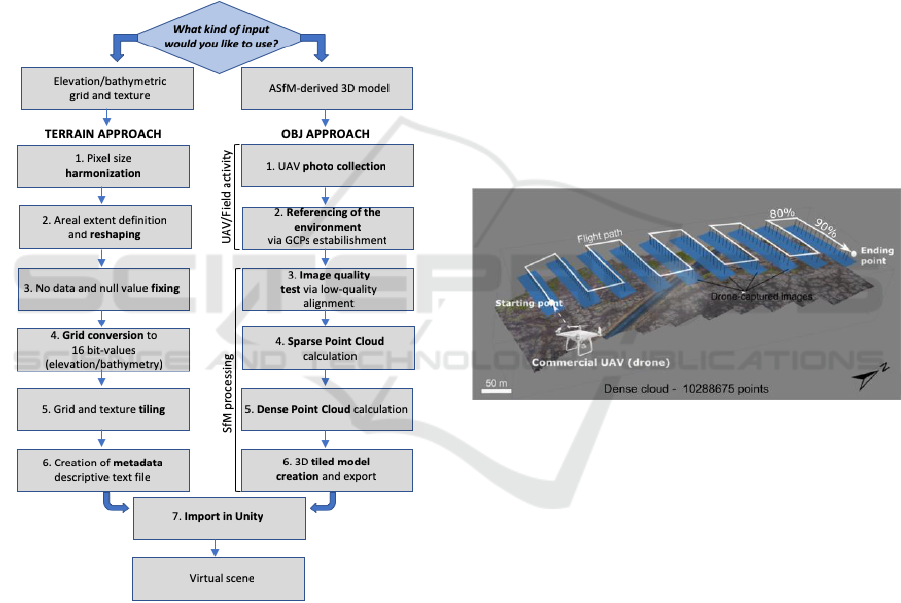
3 WORKFLOWS MODELS
This section describes the two workflows (Fig. 2)
developed to generate the VR scenes from different
sources regarding onshore and offshore
environments.
3.1 VR Scenes from DTM
Onshore and offshore data in DTM/DEM/DSM
format can be imported in the game engine using
Unity’s terrain system based on 16-bit grayscale
heightmaps. To prepare the proper input files the
following information is needed: i) an
elevation/bathymetric grid for user-selected area (the
elevation/depth value z is reported in meters); ii) a
raster/image file representing the texture for the
selected area. These datasets must be georeferenced
in metric units. The steps required to merge and
process the datasets are detailed below.
STEP 1. Harmonisation: the texture and elevation
grid have to match the same pixel size. If necessary,
both must be resampled up to the best pixel size value.
This is a critical and mandatory step in order to
c
https://tinyurl.com/y62w52ao
manage assets so that they can be imported into
Unity.
STEP 2. Reshaping: the elevation grid and the
texture must have the same extent. Furthermore, the
shape of the target area must be a square as it will
have to be divided, in a further step, in square tiles.
STEP 3. Value Fixing: another important point is
that both the elevation grid and the texture must be
assigned with non-null or non-empty values. Each
required value must be filled by interpolation or by a
default value within the range of the elevation/depth
values and RGB colours.
STEP 4. Grid Conversion: The elevation/depth grid
must be adapted in order to be used with the Unity
terrain based on an heightmap which is a black and
white image that stores elevation data. Considering
that Unity expects 16-bit unsigned integer (ranging
from black to white to represent height, where black
is the lowest point and white is the highest point) the
elevation grid must be scaled within the range 0 -
2^16=65535. This scaled data is then exported into a
new elevation grid suitable for further processing.
STEP 5. Tiling Processing: due to the high
resolution and large extension of the areas that are
usually managed, we recommend production of a
tiled set of the elevation/depth grid-texture. The
Global Mapper software
c
package has a function
(Elevation Grid Format → UNITY RAW
TERRAIN/TEXTURE) that tiles and exports (at the
same time) both the texture and the elevation grid
data. Users must set values for a number of
parameters such as terrain size and texture image size
in pixels, e.g. 4096 for the texture and 4097 for the
terrain (one additional pixel is required by Unity).
Global Mapper will then export the texture as .jpg file
format and the elevation/depth grid (called terrain in
Unity) as a 16-bit RAW file. Both of them are rotated
and ready for the import process to start in stage 6. To
facilitate the import process into Unity the following
information must be given: i) x and y limits of the
model (in the metric system - e.g. utm coordinates);
ii) areal extents of the model; iii) min and max
altitudes of the elevation/depth grid; iv) pixel size; v)
number of tiles along x and y and finally vi) number
of pixels per each tile.
STEP 6. Metadata Association: the produced tiled
elevation/depth grid-texture is finally associated with
a descriptive text file, which adds information about
the real environment depicted in the data mentioned
in step 5. The essential information these files must
contain are easting, northing and elevation. These text
Workflows for Virtual Reality Visualisation and Navigation Scenarios in Earth Sciences
299
files are formatted as JSON strings, used to calculate
the position of the player in the real-world
coordinates.
STEP 7. Tiles Importing: this step is required for
large extensions and/or high resolutions where the
number of resulting tiles can be prohibitively large.
As an example, in Gerloni et al. (2018) importing a
high-resolution terrain and texture with 2 cm/pixel
resulted in a total number of 1681 of tiles with
512x512 pixels each. To automate the import and
alignment of such numbers of tiles the Unity editor
functionality has been extended with an ad-hoc code
made available on GitHub (https://tinyurl.com
/y268jsg2).
Figure 2: Conceptual overview summarising the
workflows.
3.2 VR Scenes from ASFM 3D Models
This section describes the main steps needed for
reconstruction, processing and rendering from the
real environment into the VR scene using a 3D tiled
OBJ model. The environment can be reconstructed
using the ASfM approach (e.g. Westoby et al., 2012),
providing centrimentric pixel size resolution of the
texture. The SfM technique allows the identification
of matching features in different images, captured
along proper UAV flight paths (Fig. 3), the
combination between them to create a sparse and
dense cloud, the creation of a mesh, a texture and,
much more importantly for VR, a high-resolution 3D
tiled model (e.g. Westoby et al., 2012).
STEP 1. Photo Collection: UAV-captured photos
have been collected in order to have an overlap of
90% along the path and 80% in lateral direction,
useful to have a good alignment of images and to
reduce the distortions on the resulting orthomosaics
and have been processed with the use of Agisoft
PhotoScan (http://www.agisoft.com/), a commercial
Structure from Motion (SfM) software. We used a
quadcopter (DJI Phantom 4 Pro) for image
acquisition every 2 seconds (equal time interval
mode), with a constant velocity of 3 m/s to minimize
the motion blur, as well as to achieve well-balanced
camera settings (exposure time, ISO aperture) and
ensure sharp and sufficiently exposed images with
low noise. The UAV flight path has been planned and
managed using DJI Ground Station Pro software
(https://www.dji.com/ground-station-pro).
Figure 3: UAV flight path (white line) at 50 m of flight
height. The dense SfM-resulting cloud is represented.
STEP 2. Environment Referencing: Furthermore,
in order to allow the co-registration of datasets and
the calibration of the 3D model, World Geodetic
System (WGS84) coordinates of, at least, four
artificial Ground Control Points (GCPs) have been
established near each corner within each surveyed
area and one in the central part for reducing the so
called doming effect resulting from SfM processing
(e.g. James and Robson, 2012).
STEP 3. Image Quality Test: the first step was to
obtain an initial low-quality image alignment, only
considering measured camera locations (Reference
preselection mode). After that, images with quality
value of ˂0.5, or out of focus, have been disabled and
thus excluded from further photogrammetric
processing, as suggested in the user manual of the
software.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
300
STEP 4. Sparse Point Cloud Calculation: after this
first quality check, ground control points were added
in all images, where available, in order to: i) scale and
georeference the point cloud (and thus the resulting
model); ii) optimise extrinsic parameters, such as
estimated camera locations and orientations; iii)
improve the accuracy of the final model.
Furthermore, realignment of photos using high
accuracy settings was completed, resulting in a better
establishment of camera location and orientation, and
then the sparse point cloud was computed.
STEP 5. Dense Point Cloud Calculation: Dense
point cloud (e.g. Fig. 3) is then calculated from the
sparse point cloud, using a Mild depth filtering and
high-quality settings.
STEP 6. Tiled Model Creation: a tiled model with a
very high resolution that represents all 3D objects and
vertical surfaces (Fig. 5B) can be built and exported
in Wavefront OBJ format that is compatible with
Unity. We suggest a tile size of 4096x4096 pixels as
a compromise between performance and quality.
STEP 7. Model Rendering Optimization: in order
to optimize the rendering performance of the scene
we suggest using Levels of Detail (LODs) to reduce
the number of details shown when the model is far
away from the camera.
To make the model robust for navigation purposes
each tile must have its own collider generated and to
match the same north between the real and the virtual
world the 3D objects must be rotated by 180° along
the y axis. Finally, the virtual scene has to be properly
referenced and scaled by employing information
derived from SfM processing and thus the scene
dimension (in meters) and the corresponding
geographic coordinates must be defined, as well as
the altitude referred to the 3D reconstructed model.
After these steps, the scene is ready to be navigated
(e.g. Fig. 5B).
4 USE CASES
This section describes the application of the
mentioned workflows through two different cases.
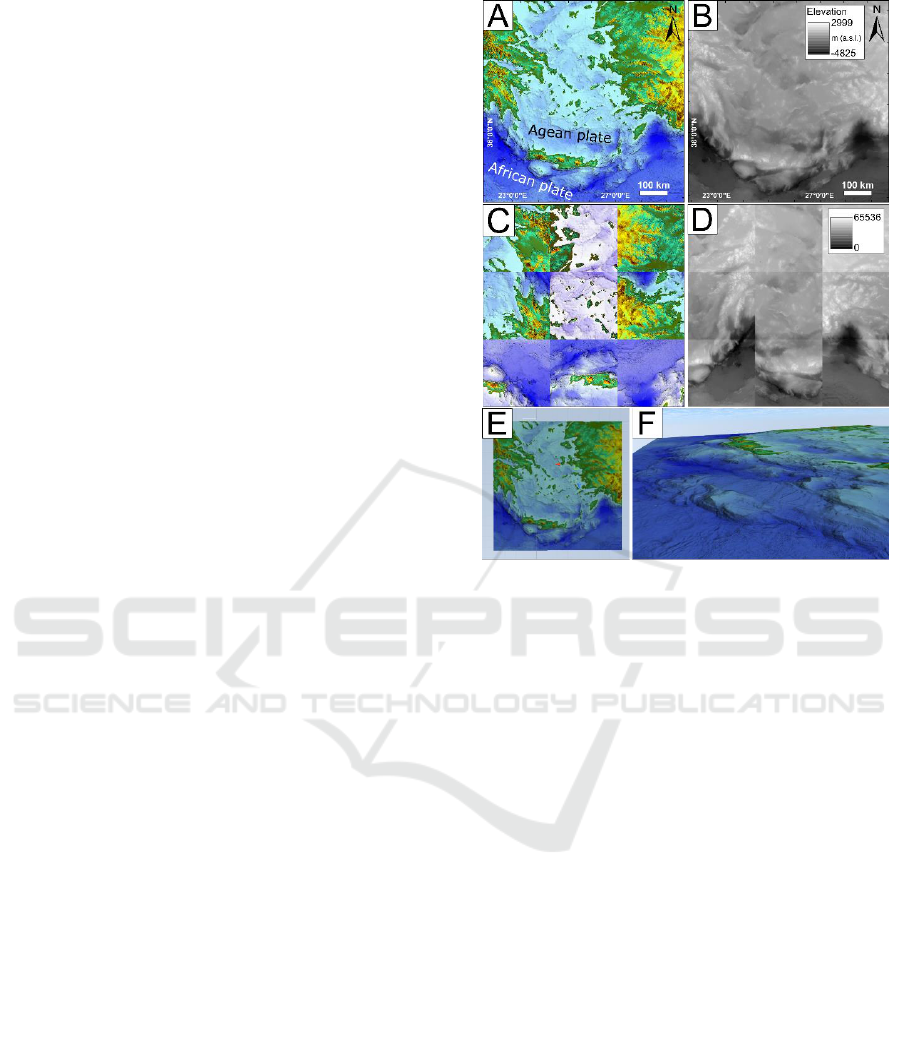
4.1 VR Scene from DTM
In this use case we demonstrate the workflow
discussed in Section 3.1 (Fig. 2) using a large area of
the Hellenic arc with WGS 84 / UTM zone 35N
spatial reference system (Fig. 4).
Figure 4: (A) texture; (B) elevation grid; (C) tiled texture;
(D) raw tiled terrain ready to be imported in Unity; (E) tiled
model in Unity and (F) VR navigation.
Bathymetry comes from EMODnet-Bathymetry
and DEM from the Srtm v4.1 DEM database
(http://srtm.csi.cgiar.org/), having a different areal
extent and pixel size. They have been harmonized to
the same (best) pixel size, merged and reshaped to a
square area, and incorrect values have been fixed
(Steps 1, 2 and 3; Fig. 4B); The texture (Fig. 4A) has
been created from the resulting elevation grid and it
is representative of the elevation. Grid conversion and
tiling processing (Steps 4-5) is depicted in Figures
4C-D. Finally, Figure 4E shows the resulting tiled
model in Unity whereas the VR navigation is depicted
in Figure 4F.
4.2 VR Scene from OBJ Model
In this use case we demonstrate the workflow
discussed in Section 3.2, focusing on the western part
of the Metaxa Mine, Santorini, Greece. The first UAV
flight was dedicated specifically in capturing a set of
photos in nadir camera view (Fig. 5A) with the
suggested overlap (Bonali et al., 2019). The photos
have been captured every 2 seconds, at an altitude of
20 m from the highest point of the ground (Home
point) and with a constant velocity of 2 m/s. The
second flight was for collecting photos of the vertical
Workflows for Virtual Reality Visualisation and Navigation Scenarios in Earth Sciences
301
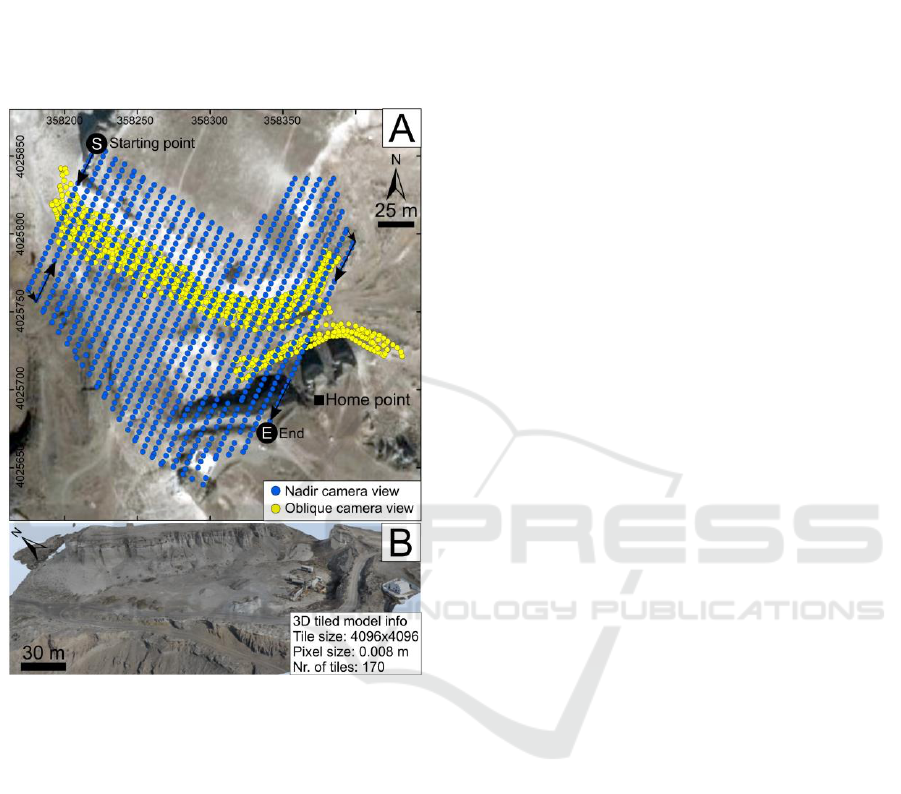
outcrops and the camera was oriented orthogonal to
vertical cliff, in order to add details to the model. A
set of 20 GCPs have also been included in order to
co-register the 3D model to the WGS84 reference
system. The resulting 3D model is as large as 349 x
383 m, is composed of 170 tiles, each of them is
4096x4096 pixels, and the pixel resolution is 8 mm;
it has been imported in Unity engine (Fig. 5B).
Figure 5: (A) Location of UAV-captured images, spatial
reference: WGS 84 / UTM zone 35N. (B) 3D tiled model of
the western part of the mine, explored in virtual reality.
5 DISCUSSION
We deployed the workflows presented in earlier
sections (Fig. 2) to create Unity scenes for the
purposes of visual exploration through immersive
VR. Both approaches (terrain and OBJ) enable
immersive user interaction scenarios based on
previously reconstructed 3D models. This section
reports on our experiences with various models with
both approaches and discusses briefly possible
improvements and pointers to future work
developments. The terrain approach is suitable for
DTM/DSM-textures both from freely available
sources and ad-hoc created models for onshore/
offshore environments, individually or combined.
Specifically, this approach works within a wide range
of resolutions from hundreds down to single meters.
Although other works (e.g. Gerloni et al., 2018) have
applied a similar approach down to cms scale, this
may require scalings within Unity posing excessive
memory requirements resulting in prohibitively low
frame rates. Figure 6A shows an example of the
Cratered Cones Near Hephaestus Fossae (in Mars)
based on the publicly available HiRISE Digital
Terrain Models (https://www.uahirise.org/). The
resolution of the area shown is 1m whereas the areal
extent is 4800 x 4800 m. Figure 6B shows an ad-hoc
bathymetric model created from data collected during
two oceanographic cruises, with the use of a Reson
Seabat 8160 Multibeam Echosounder (Savini et al.,
2010; Savini et al., 2014). The resulting DTM is of 40
m resolution and provides a wide range of
bathymetric depth information from 120m to 1400m.
The 3D OBJ approach was also tested with several
models of different areal extents and resolutions (see
Figs. 6C-D) covering from 8mm to 1m. This
approach allows improved representations of
geometry especially around features that are vertical
to the terrain as shown in Figure 6D where an outcrop
from Vlychada beach, Santorini, Greece, shows
several volcanic layers related to the Minoan eruption
(e.g. Nomikou et al., 2016). To our experience so far
both approaches work well in creating VR scenes. A
number of optimisations are planned for future
developments. Firstly, we would like to avoid any
dependencies upon proprietary software packages
(such as Agisoft Photoscan, Global Mapper or
ArcGIS). Currently the open-source alternatives such
as QGIS (https://www.qgis.org/it/site/) and
VisualSFM (http://ccwu.me/vsfm/) suffer from a
number of limitations, e.g. non-streamlined user
interface for data processing for the former, and low
quality of point clouds for the latter (e.g. Burns et al.,
2017). Additionally, for VisualSFM further post-
processing through other third party software is
needed (Falkingham, 2013). Regarding the use of VR
in Earth Sciences, this technology provides a series of
positive feedbacks for geological and geo-hazards
studies.
Firstly, it facilitates the survey of geological
environments and related geo-hazards assessment: i)
travel time and associated costs to study remote areas
are cut off, for example from Europe to South
America or Asia (Lanza et al., 2013; Tibaldi et al.,
2015); ii) all logistic issues that must be taken into
account during mission preparation are overcome, as
well as VR allows to access remote or dangerous
areas (e.g. Tibaldi et al., 2008).
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
302

Figure 6: VR scenes from elevation / bathymetric grid-
texture format (A-B) and 3D OBJ models (C-D).
This technology is also very innovative and can
be used for research, teaching and outreach activities,
encompassing a wide audience that spans from early
career scientists and civil planning organisations, to
academic and non-academic people. Finally, it is
possible to establish a virtual geological lab where the
reconstructed key sites are permanently available for
geological exploration and studies, thus providing the
possibility of geological exploration also to people
affected by motor disabilities.
6 FUTURE DEVELOPMENTS
Our future vision is to build fully open-source
workflows avoiding completely any dependencies
upon proprietary software. To this extent we will
work in integrating existing open source packages
while injecting into them any additional
functionalities as required. Specifically, for the
terrain approach to streamline the process for end
users, as automatic as possible procedures are needed.
We envisage development of a collection of Python
scripts to handle tasks such as areal extent definition
and pixel homogenization of both elevation grids and
textures or the conversion to RAW format and
successive tiling process. Although the development
of our workflows was based on the Unity game
engine we have focused on the generic functionalities
of game engines abstracting from specific realisations
thus following a modular approach so that in future
we would be able to support other engines. Our future
development plan also includes a formal assessment
of user interaction mechanisms under various
scenarios to ascertain potential VR experiences fully
tailored to specific teaching, training and research
activities, including scenarios coming from
geophysical and lab-scaled studies (Tortini et al.,
2014; Russo et al., 2017).
7 CONCLUSIONS
We have outlined generic workflow approaches for
creating virtual reality scenes based on a variety of
sources. We have demonstrated onshore and offshore
(including combined) examples using different
sources and deploying different. The vision is to build
fully automated workflows without any dependencies
upon proprietary software packages. The work
presented in this paper has followed a generic
approach applicable to creating virtual scenarios in
other disciplines such as geophysic, astro planetary
sciences and archaeology.
ACKNOWLEDGEMENTS
This work is supported by i) 3DTeLC Erasmus+
Project 2017-1-UK01-KA203-036719; ii) MIUR
Argo3D projects; iii) MIUR – Dipartimenti di
Eccellenza 2018–2022 (http://3dtelc.lmv.uca.fr/;
http://www.argo3d.unimib.it/).
REFERENCES
Bonali, F.L., Tibaldi, A., Marchese, F., Fallati, L., Russo,
E., Corselli, C. and Savini, A. (2019). UAV-based
surveying in volcano-tectonics: An example from the
Iceland rift. Journal of Structural Geology, pp.46-64.
Burns, J. and Delparte, D. (2017). Comparison of
commercial structure-from-motion photogrammety
software used for underwater three-dimensional
modeling of coral reef environments. ISPRS -
International Archives of the Photogrammetry, Remote
Sensing and Spatial Information Sciences, XLII-2/W3,
pp.127-131.
Dykes, T., Hassan, A., Gheller, C., Croton, D. and Krokos,
M. (2018). Interactive 3D Visualization for Theoretical
Virtual Observatories, MNRAS, 477, pp.1495–1507.
Freina, L., Ott, M. (2015). A Literature Review on
Immersive Virtual Reality in Education: State of The
Art and Perspectives. eLearning & Software for
Education, 1.
Falkingham, P.L. (2013). Generating a photogrammetric
model using Visual SFM, and post-processing with
meshlab. Brown University, Tech. Rep.
Gerloni, I. G., Carchiolo, V., Vitello, F. R., Sciacca, E.,
Becciani, U., Costa, A., ... & Marchese, F. (2018).
Immersive Virtual Reality for Earth Sciences. In 2018
Federated Conference on Computer Science and
Information Systems (FedCSIS) IEEE, pp.527-534.
James, M.R., Robson, S., d'Oleire-Oltmanns, S.,
Niethammer, U. (2017). Optimising UAV topographic
surveys processed with structure-from-motion: ground
Workflows for Virtual Reality Visualisation and Navigation Scenarios in Earth Sciences
303

control quality, quantity and bundle adjustment.
Geomorphology 280, pp.51-66.
Lanza, F., Tibaldi, A., Bonali, F.L. and Corazzato, C.
(2013). Space–time variations of stresses in the
Miocene–Quaternary along the Calama–Olacapato–El
Toro Fault Zone, Central Andes. Tectonophysics, 593,
pp.33-56.
Lawson, E. (2016). Game engine analysis. Dublin,
available at: www. gamesparks. com/blog/game-
engine-analysis/
Liu, X. (2008). Airborne LiDAR for DEM generation:
some critical issues. Progress in Physical Geography,
32(1), pp.31-49.
Mitasova, H., Harmon, R.S., Weaver, K.J., Lyons, N.J. and
Overton, M.F. (2012). Scientific visualization of
landscapes and landforms. Geomorphology, 137(1),
pp.122-137.
Nayyar, A., Mahapatra, B., Le, D. and Suseendran, G.
(2018). Virtual Reality (VR) & Augmented Reality
(AR) technologies for tourism and hospitality industry.
International Journal of Engineering & Technology,
7(2.21), pp.156-160.
Nomikou, P., Druitt, T., Hübscher, C., Mather, T., Paulatto,
M., Kalnins, L., Kelfoun, K., Papanikolaou, D.,
Bejelou, K., Lampridou, D., Pyle, D., Carey, S., Watts,
A., Weiß, B. and Parks, M. (2016). Post-eruptive
flooding of Santorini caldera and implications for
tsunami generation. Nature Communications, 7(1),
p.13332.
O’Flanagan, J. (2014). Game engine analysis and
comparison. Dublin, available at: www. gamesparks.
com/blog/game-engine-analysis-and-comparison/
Oprean, D., Simpson, M. and Klippel, A. (2018).
Collaborating remotely: an evaluation of immersive
capabilities on spatial experiences and team
membership. International journal of digital earth,
11(4), pp.420-436.
Russo, E., Waite, G.P. and Tibaldi, A. (2017). Evaluation
of the evolving stress field of the Yellowstone volcanic
plateau, 1988 to 2010, from earthquake first-motion
inversions. Tectonophysics, 700, pp.80-91.
Savini, A. and Corselli, C. (2010). High-resolution
bathymetry and acoustic geophysical data from Santa
Maria di Leuca Cold Water Coral province (Northern
Ionian Sea—Apulian continental slope). Deep Sea
Research Part II: Topical Studies in Oceanography,
57(5-6), pp.326-344.
Savini, A., Vertino, A., Marchese, F., Beuck, L. and
Freiwald, A. (2014). Mapping cold-water coral habitats
at different scales within the Northern Ionian Sea
(Central Mediterranean): an assessment of coral
coverage and associated vulnerability. PLoS One, 9(1),
p.87108.
Sciacca, E., Becciani, U., Costa, A., Vitello, F., Massimino,
P., Bandieramonte, M., Krokos, M., Riggi, S., Pistagna,
C. and Taffoni, G. (2015). An integrated visualization
environment for the virtual observatory: Current status
and future directions. Astronomy and Computing, 11,
pp.146-154.
Tibaldi, A., Pasquarè, F. A., Papanikolaou, D., & Nomikou,
P. (2008). Discovery of a huge sector collapse at the
Nisyros volcano, Greece, by on-land and offshore
geological-structural data. Journal of Volcanology and
Geothermal Research, 177(2), pp.485-499.
Tibaldi, A., Corazzato, C., Rust, D., Bonali, F.L., Mariotto,
F.P., Korzhenkov, A.M., Oppizzi, P. and Bonzanigo, L.
(2015). Tectonic and gravity-induced deformation
along the active Talas–Fergana Fault, Tien Shan,
Kyrgyzstan. Tectonophysics, 657, pp.38-62.
Tortini, R., Bonali, F.L., Corazzato, C., Carn, S.A. and
Tibaldi, A. (2014). An innovative application of the
Kinect in Earth sciences: quantifying deformation in
analogue modelling of volcanoes. Terra Nova, 26(4),
pp.273-281.
Turner, D., Lucieer, A. and Watson, C. (2012). An
automated technique for generating georectified
mosaics from ultra-high resolution unmanned aerial
vehicle (UAV) imagery, based on structure from
motion (SfM) point clouds. Remote sensing, 4(5),
pp.1392-1410.
Vitello, F., Sciacca, E., Becciani, U., Costa, A.,
Bandieramonte, M., Benedettini, M., Brescia, M.,
Butora, R., Cavuoti, S., Di Giorgio, A.M. and Elia, D.
(2018). Vialactea Visual Analytics Tool for Star
Formation Studies of the Galactic Plane. Publications
of the Astronomical Society of the Pacific, 130(990),
p.084503.
Westoby, M.J., Brasington, J., Glasser, N.F., Hambrey,
M.J. and Reynolds, J.M. (2012). ‘Structure-from-
Motion’photogrammetry: A low-cost, effective tool for
geoscience applications. Geomorphology, 179, pp.300-
314.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
304
