
Development of 8х8 All-terrain Vehicle with Individual Wheel Drive
Alexander Belyaev
1
, Sergey Manyanin
2
, Anton Tumasov
1
, Vladimir Makarov
1
and Vladimir Belyakov
1
1
Transport Systems Institute, Nizhny Novgorod State Technical University n.a. R.E. Alekseev,
Minin St., 24, Nizhny Novgorod, Russian Federation
2
LLC Transmash, Cherepichny village, 3, Nizhny Novgorod, Russian Federation
Keywords: Multifunctional All-terrain Vehicle, Hydrostatic Transmission Driveline, Efficiency, Fuel Consumption.
Abstract: In this article, we consider the problem of developing a rational competitive design of a multifunctional all-
terrain vehicle (MATV) with 8х8 axle configuration. Empirical dependencies are proposed to calculate
weight-size parameters of these vehicles, such as power and power-to-weight ratio, payload, maximum speed,
average ground pressure depending on full vehicle weight. Key dependencies are provided to calculate
hydrostatic transmission (HST) parameters used to determine hydraulic unit sizes and connection diagrams.
Various HST control algorithms are analyzed in order to increase efficiency and reduce fuel consumption.
The results show that the right HST control algorithm can increase efficiency by 10%, and reduce fuel
consumption by 18%. General view of the developed MATV is provided.
1 INTRODUCTION
Most of the Russian territory is characterized by
rather poor road infrastructure. These un- and
underdeveloped areas are hard to reach but very
promising in terms of mineral and hydrocarbon
production. A study shows that individuals and
companies in Russia purchase around 700 – 750
new vehicles annually. The market is dominated by
4х4 and 6х6 all-terrain vehicles. 8х8 modifications
account for just 20% of all sales, but they are as
good off-road as tracked vehicles, and less
destructive to the tundra soil. Individual wheel drive
and the right control algorithms for each wheel
ensure the best cross-country abilities, highest
efficiency and lowest emissions.
Therefore, in this article we consider the
problem of developing a rational competitive design
of a 8х8 vehicle with individual wheel drive.
Possible algorithms for power distribution flow
control in hydrostatic transmission are analyzed.
2 CALCULATION OF
WEIGHT-SIZE PARAMETERS
We have analyzed the key parameters of current
multiaxial all-wheel drive vehicles with 8х8 axle
configuration and obtained basic relations for
weight, power and speed characteristics
(Barahtanov et al., 2015) Table 1 contains
regression equations for all-terrain vehicles, trucks
and special purpose vehicles.
Recommended parameters for the developed all-
terrain vehicle are listed in Table 2. Full vehicle
weight served as an initial parameter. The reason for
such choice is that all-terrain vehicles with 8-9 t full
weight have an insignificant market share in Russia.
All analogs of the developed multiaxial vehicle
on ultra low pressure tires are equipped with manual
transmission (reducers, cardan shafts, etc.) But it is
not enough for cross-country conditions. Such
vehicles require infinitely variable automatic
transmission combining individually regulated
power actuators for each wheel with automatic
control system. Efficient torque adjustment helps
each wheel to achieve maximum traction on low-
load-bearing capacity soils. Skid control system for
each wheel ensures maximum traction force and
minimum road resistance.
Current multiaxial wheeled vehicles are
equipped with electromechanical (for example,
NEMTT-AZ by Oshkosh, 6х6 multipurpose vehicle
by QinetiQ, 8x8 experimental prototype BAZ-
М6910E) and hydrostatic transmission (HST). The
best-known Russian vehicle with hydrostatic
transmission is three-axle vehicle «Gidrohod-
556
Belyaev, A., Manyanin, S., Tumasov, A., Makarov, V. and Belyakov, V.
Development of 8x8 All-terrain Vehicle with Individual Wheel Drive.
DOI: 10.5220/0007765505560561
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 556-561
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
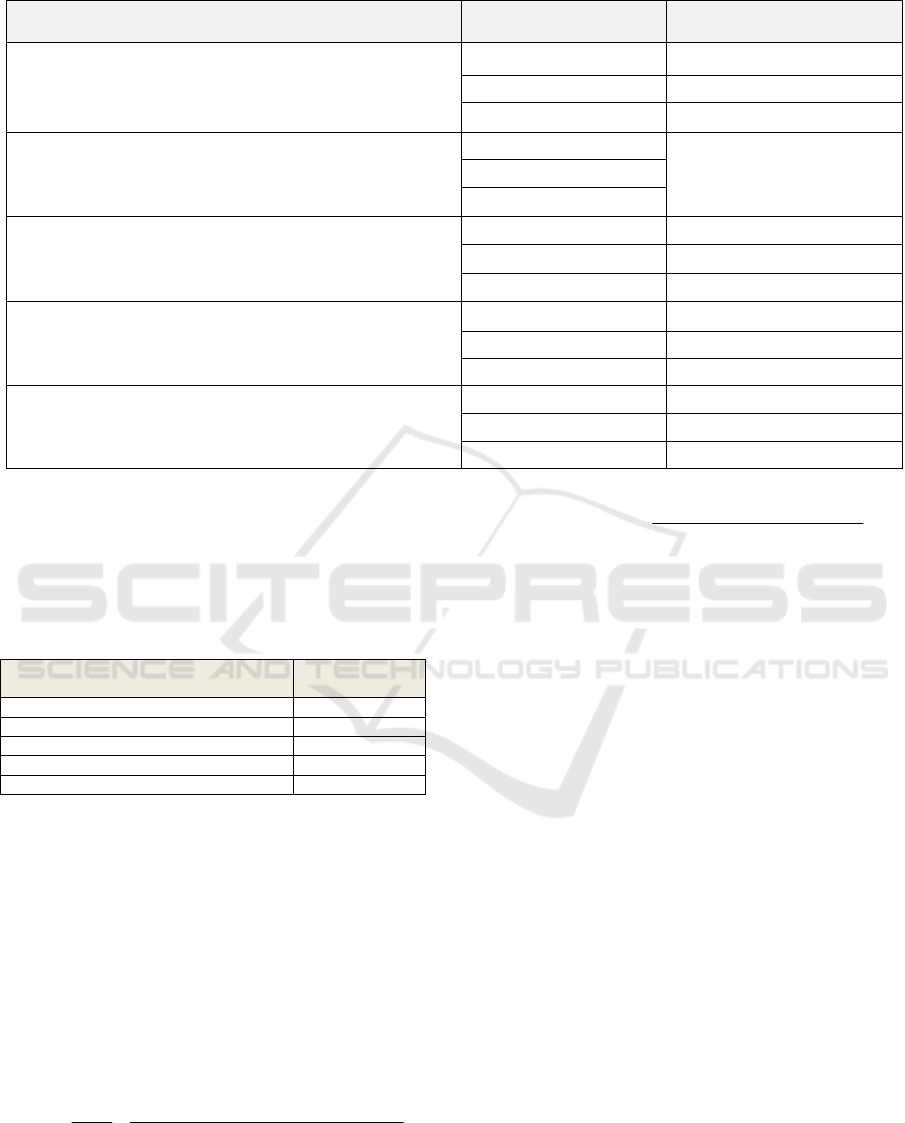
Table 1: Regression equations for design parameters of 8х8 vehicles.
Dependencies Vehicle type Formula
Engine power from full vehicle weight, [kW - t]
All-terrain Pe = 15 Ma + 13
Trucks Pe = 4 Ma + 135
Special purpose Pe = 13 Ma + 21
Power-to-weight ratio from full vehicle weight, [kW/t - t]
All-terrain
pe = 27-5 ln(Ma)
Trucks
Special purpose
Payload from full vehicle weight,
[t - t]
All-terrain Mг = 0,3 Ma
Trucks Mг = 0,8 Ma - 9,1
Special purpose Mг = 1
Maximum speed from full vehicle weight, [km/h - t]
All-terrain Vа = 38 Ma0,3
Trucks Vа = 80
Special purpose Vа = 38 Ma0,3
Average ground pressure from full vehicle weight, [kPa - t]
All-terrain p = 0,6 Ma + 5,4
Trucks p = 1,.3Ma + 25,1
Special purpose p = 1,6 Ma + 14
49061» developed by the Central Scientific
Research Automobile and Automotive Engines
Institute «NAMI» (Belyakov et al., 2018). In
Russia, the most common type of infinitely variable
automatic transmission is hydrostatic transmission.
Table 2: Recommended vehicle parameters.
Parameter
Recommended
value
Full weight, t 8-9
Payload, t min. 3
Powe
r
-to-weight ratio, kW/t max. 15
Maximum speed, m/s min. 70
Average ground pressure, kPa 10.2-10.8
3 MATHEMATICAL MODEL OF
THE VEHICLE WITH
HYDROSTATIC
TRANSMISSION
HST parameters are determined basing on the
traction-speed calculation. The ability rating is
calculated from the following dependence
(Belyakov et al., 2018):
ксa
ммммпотпнрмрм
ксa
rG
zqpppi
rG
M
D
2
maxmax
max
102
vehicle speed is calculated from the formula
(Belyakov et al., 2018):
min
max
max e
max
max
max
2
377.0
нм
P
Vнрмрн
кс
P
Vннн
к
qzii
rqz
V
w
w
where – vehicle speed;
н
;
м
– number of pumps,
motors;
– angular velocity of the motor;
н
;
м
– pump volume, motor volume;
кс
– rolling radius;
н
– pump pressure; Δ
пот
– pressure drop in the
hydraulic circuit;
п
– charge pressure;
а
– vehicle
weight;
рн
,
рм
– pump, motor reducer ratios,
рп
;
н
,
м
,
рм
– efficiency factor of pump reducer,
pump, motor, motor reducer.
Calculation results helped to define typical sizes
of hydraulic units and connection schemes
(SHuhman et al., 2007). We have selected a
hydrodifferential scheme with individual control,
two 125 cm3 pumps and eight 107 см3 motors.
Transmission scheme is shown in Figure 1.
A Matlab/Simulink model has been developed
for initial HST configuration and adjustment. The
basic equations for hydraulic unit parameters are
given below.
For the pump:
– torque
1
2
ннн
Tpq
w
,
– discharge
н
ннн
ω
V
qQ
.
For the motor:
– torque
1
ммм
2
qpT
w
,
– discharge
1
ммм
м
ω
V
qQ
.
Development of 8x8 All-terrain Vehicle with Individual Wheel Drive
557
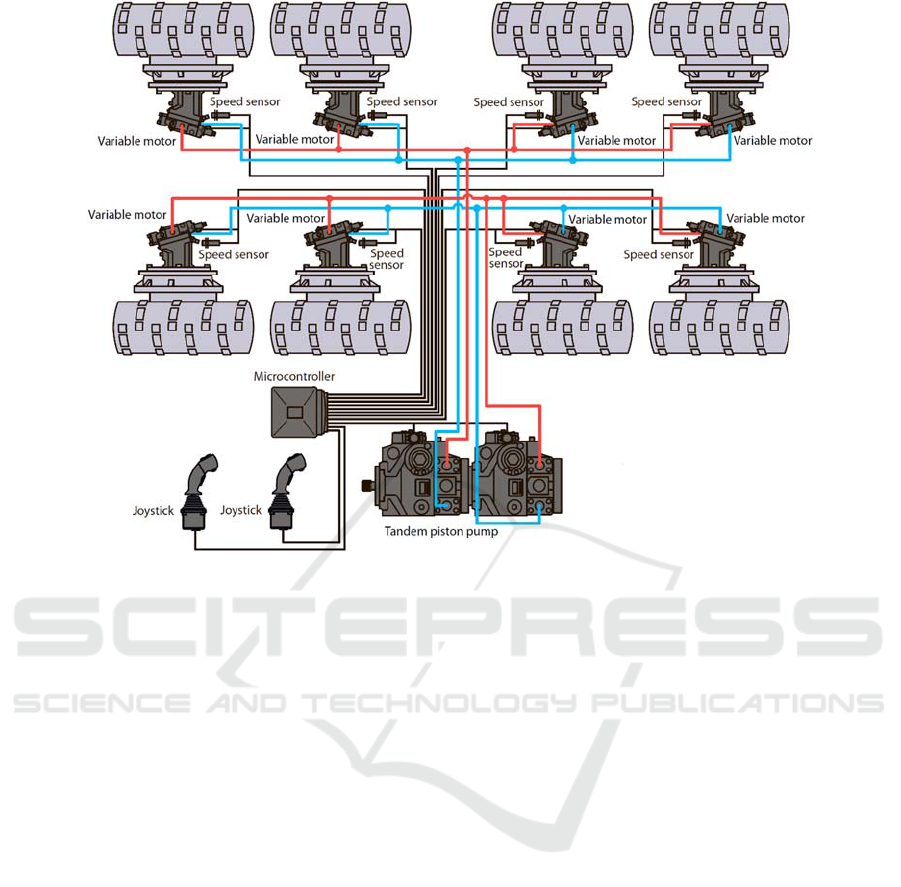
Figure 1: Structural transmission scheme.
w
p
– pressure drop of the working fluid in
pumping and draining lines of hydraulic units,
н
V
,
м
V
– volume efficiency factor of the pump and the
hydraulic motor.
Torque distribution on motor shafts is calculated
from the following formula (Belyakov et al., 2018):
::::::
3м2м1м3м2м1м
qqqTTT
Angular velocities of hydraulic motors are
calculated from the dependence (Belyakov et al.,
2018):
3м3м2м2м1м1мн
ωωω qqqQ
Torque from the hydraulic pump applied to the drive
wheel is used to overcome rolling resistance,
accelerate the wheel and implement traction. The
general equation of wheel dynamics is given below:
сопрммм
TiTI
kk
The rotation resistance torque is determined by the
rolling resistance torque and the torque generated by
the tangential component of the wheel-soil
interaction force:
)()(
сопр xz
RTRTT
.
A model from the works (SHuhman et al.,2007);
(Belousov et al., 2013); (Kurmaev, 2009) served as
a basis for HST operation model for multiaxial
vehicle.
The calculations presented above make it
possible to analyze the HST parameter control
algorithms in order to achieve maneuverability,
cross-country ability and power efficiency targets in
off-road conditions reflecting the factors that
influence vehicle operational parameters. Slip
control ensures maximum traction force and
minimum rolling resistance.
To select rational settings for HST control
system, we have analyzed various control
algorithms (Lepeshkin, 2012); (Gorelov et al.,
2012); (Kotiev et al., 2012); (Gorelov et al., 2011);
(Serebrennyj, 2009):
- slip control algorithm for the side wheels based
on the known linear velocity of MATV chassis'
center of inertia;
- «high-threshold» control algorithm for the side
wheels of MATV chassis (with angular
acceleration limitation);
- slip control algorithm based on the average
rotation velocity of MATV chassis' side wheels.
We have simulated MATV movement on various
surfaces and performed virtual tests on high
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
558
adhesion roads followed by low adhesion roads, and
tests on high adhesion surfaces with alternating low
adhesion surfaces. The most challenging surface for
HST control system is the «mixed» road surface
with random parameter setting. For simulation, we
have set a combination of snow and soil surfaces
with characteristics assigned according to the
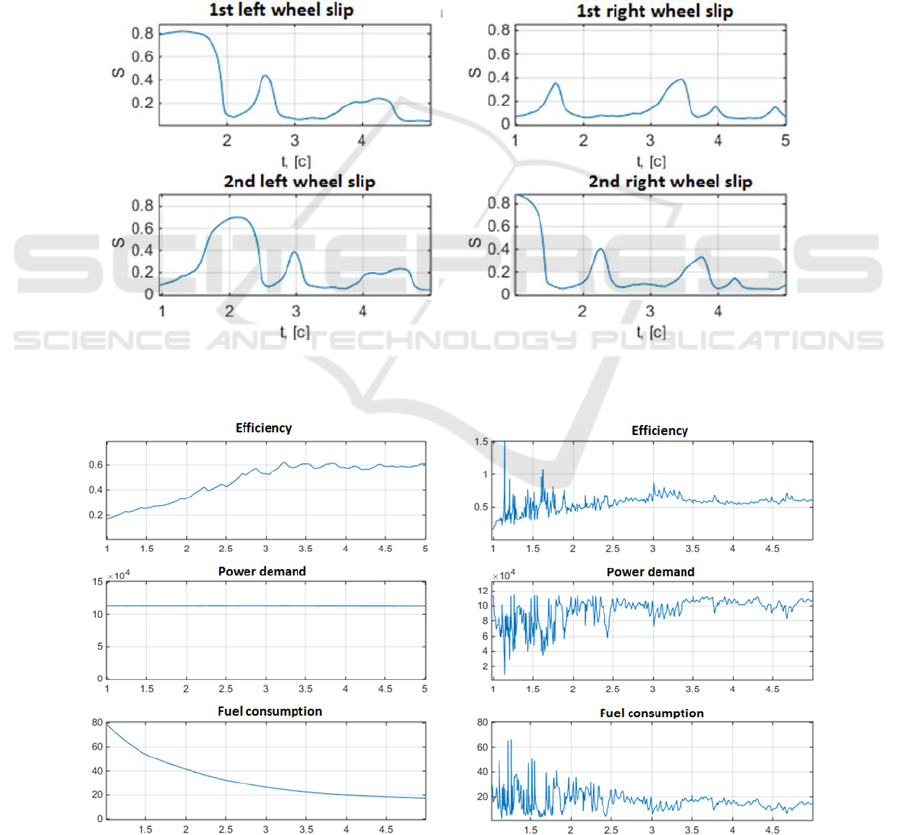
normal law of distribution. Examples of wheel slip
changes for MATV simulation w/o control system
(on the left) and w/ control system (on the right) are
indicated in Figure 2. Changes in efficiency, power
demand and fuel consumption for MATV
simulation w/ control system are shown in Figure 3.
The curves in Fig. 2 and 3 show that
implementation of control system reduces slipping,
increases efficiency, and cuts power loss related to
movement and fuel consumption. In this case, the
most relevant characteristics are efficiency and fuel
economy. Now we shall determine which control
algorithm is more suitable for the developed
MATV.
4 EFFICIENCY AND FUEL
ECONOMY EVALUATION
To evaluate power efficiency, we use the value
equal to the ratio of «effective» traction work
applied to the wheels to the «performed» work of
Figure 2: Examples of wheel slip curves for MATV simulation w/o control system (on the left) and w/ control system (on the
right).
Figure 3: Examples of efficiency, power demand and fuel consumption curves for MATV simulation w/o control system (on
the left) and w/ control system (on the right).
Development of 8x8 All-terrain Vehicle with Individual Wheel Drive
559
the input torque.
Efficiency of MATV wheel drive control
algorithms should be estimated in HST operation
simulation w/o the parameter control system. This
will ensure qualitative assessment.
Since the estimated parameters take on different
values at any time, they should be considered as an
integrated measure in the course of vehicle
movement. Otherwise, dependencies for the
variable processes will be defined based on the
following dependencies:
– for efficiency
T
эф
dtKK
инт
эф
where
эф
k
– efficiency factor at any time,
T
– total
movement time.
– for fuel economy
T
dtQQ
инт
эф
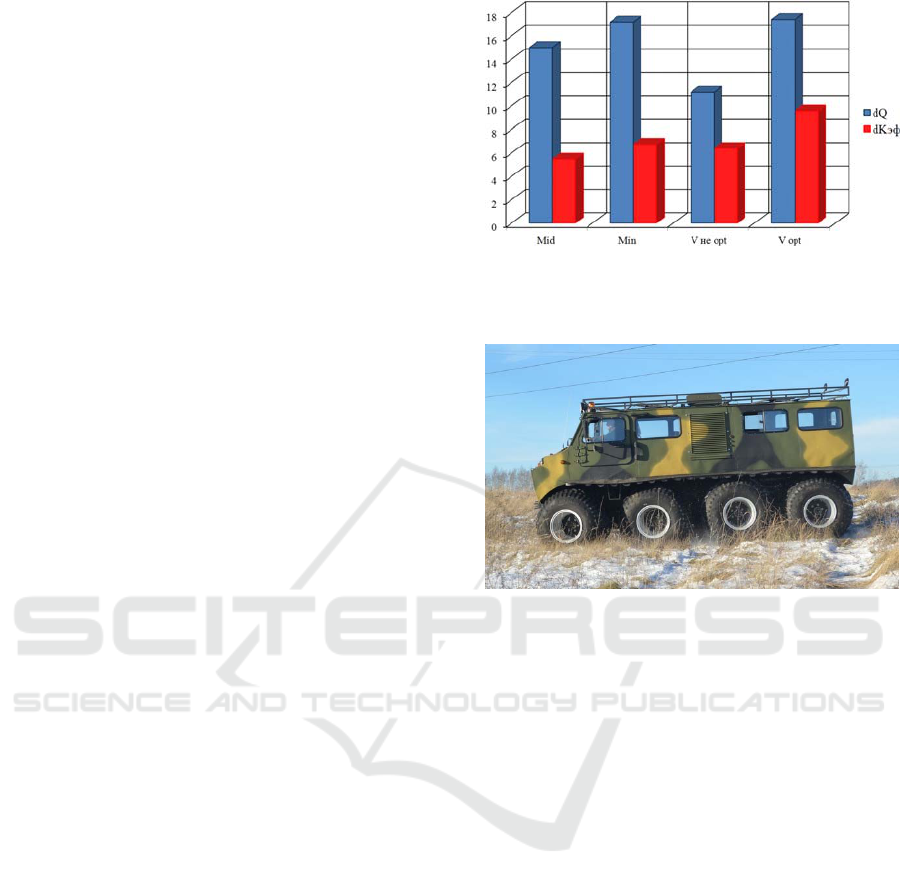
Changes in efficiency and fuel consumption on the
«mixed» road surface w/ HST control system using
different control algorithms are presented on the
diagram in Fig. 4.
5 DATA ANALYSIS
Basing on the results of computer simulation, we
can judge the efficiency of the developed control
algorithms for the hydrostatic wheel drive. The
higher variability of the surface parameters, the
higher the HST control system efficiency. For
example, for step change of the parameters typical
for the high adhesion surface followed by a low
adhesion area, increase in efficiency and drop in
fuel consumption amount to just tenths of a
percentage point. For the high adhesion surfaces
with alternating low adhesion surfaces, efficiency is
increased by 3-5 %, and fuel consumption is
reduced by 8-14 % depending on the selected
control algorithm. For the «mixed» surface,
efficiency is increased by 5-10 %, and fuel
consumption is decreased by 11-18 % depending on
the selected control algorithm.
It should be noted that for actual operating
conditions of MATV the most suitable surface is the
«mixed» one. It means that the developed control
algorithms will not just boost maneuverability, but
also increase HST efficiency by 10% and reduce
fuel consumption by 18%.
Figure 4: Incremental efficiency factor and decremental
fuel consumption diagram for the «mixed» road surface
w/ HST control system using different control algorithms.
Figure 5: General view of MATV.
6 PRACTICAL
IMPLEMENTATION
The calculations served as a basis for MATV
development. General view of the vehicle
(Belyakov et al., 2018);y(
Belyakov et al., 2015) is
presented in Fig. 5. The technical characteristics
correspond to the calculations. The vehicle will be
manufactured by LLC Transmash
(http://www.transmashnn.ru/).
7 CONCLUSIONS
– layout schemes and design options for 8х8
vehicles have been analyzed.
– statistical dependencies for multiaxial vehicles,
boundaries of rational parameters for
development of a competitive MATV have been
obtained: full weight 8-9 t, min. payload 3 t,
max. power-to-weight ratio 15 kW/t, average
ground pressure 10.2-10.8 kPa.
– implementation of infinitely variable hydrostatic
transmission in the Russian vehicles has been
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
560

motivated.
– various HST control algorithms have been
analyzed: algorithm based on the known linear
velocity of center of inertia, «high threshold»
algorithm for the side wheels of MATV chassis
(with angular acceleration limitation), algorithm
based on the average rotation velocity of the side
wheels.
– the results have showed that depending on the
selected control algorithm and operating
conditions, efficiency increases by 10 %, and
fuel consumption falls by as much as 18 %.
– theoretical research presented in the paper has
been implemented in the MATV manufactured
by LLC Transmash.
REFERENCES
Barahtanov L. V., Belyakov, V.V. Zezyulin, D.V.
Makarov, V.S. Manyanin, S.E. Tropin, S.L., 2015.
Justification of a rational design of all-terrain vehicle
with the wheel formula 8x8] / Vestnik
mashinostroeniya. – 2015. – № 6. – S. 3-5
Belyakov V.V., Beresnev P.O., Zeziulin D.V., Kurkin
A.A., Makarov V.S., Filatov V.I., 2016. Development
of a Multifunctional All-Terrain Vehicle Equipped
with Intelligent Wheel-Drive System for Providing
Increased Level of Energy Efficiency and Improved
Fuel Economy / Proceedings of the Scientific-
Practical Conference “Research and Development -
2016”/ K.V. Anisimov et al. (eds.), 2018. p.179-188
DOI 10.1007/978-3-319-62870-7_20
SHuhman S.B., Solov'ev V.I., Prochko E.I., 2007. Theory
of power drive of all-terrain vehicles wheels /Pod
obshch. red. prof., d.t.n. S.B. SHuhmana. —
M.:Agrobiznescentr, 2007. - 336 p.
Belousov B. N., SHuhman S. B., 2013. Applied
Mechanics of terrestrial traction and transportation
vehicles with mechatronic systems/- M: Agrokonsalt,
2013.
Kurmaev R. H., 2009. A method for increasing the
efficiency of multi-axis wheel drive vehicles with
hydrostatic transmission by the use of corrective
algorithms. Theses of Candidate of Technical
Science.- Moskva, 2009.- 229p.
Lepeshkin A.V., 2012. The methodology of creating
"intelligent" system of automatic adaptive control
transmission of multidrive wheeled vehicle //
Izvestiya moskovskogo gosudarstvennogo
tekhnicheskogo universiteta MAMI - 2012.
Gorelov V.A., Maslennikov A.A., Tropin S.L., 2012.
Forecasting performance of curvilinear motion in
multi wheeled vehicles for different all-wheel steering
laws. Nauka i obrazovanie, 2012, no. 5. Available at:
http://technomag.edu.ru/doc/ 403845.html (Accessed
10 April 2016), doi: 10.7463/0512.0403845.
Kotiev G.O., Gorelov V.A., Miroshnichenko A.V., 2012.
Synthesis of control traction motor for individual
drive wheeled vehicle. // Nauka i obrazovanie. 2011,
no. 12, Available at: http://technomag.
edu.ru/doc/282533.
html (Accessed 20 August 2012).
Gorelov V.A., Kotiev G.O., Miroshnichenko A.V., 2011.
Algorithm for Control of Individual Drive of Wheeled
Propelling Agent of Transport Aids. Vestnik MGTU
imeni N.E. Baumana. Seriia Mashinostroenie. 2011.
Special issue of Power and Transport Engineering,
pp. 39—58.
Serebrennyj I.V., 2009. Increasing of trafficability of all-
wheel drive vehicle through the rational distribution of
power at the wheels. Theses of Candidate of
Technical Science. – M.: MGTU im. N.EH.
Baumana, 2009. - 161 s.
Belyakov, V., Kurkin, A., Makarov, V., Zeziulin, D.,
2015. Multifunctional vehicle for coastal areas,
Proceedings of the 12th International Conference on
the Mediterranean Coastal Environment,
MEDCOAST 2015, pp. 945-951.
Development of 8x8 All-terrain Vehicle with Individual Wheel Drive
561
