
Approach to Testing Many State Machine Models in Education
Shinpei Ogata, Mizue Kayama and Kozo Okano
Faculty of Engineering, Shinshu University, Wakasato 4-17-1, Nagano-shi, Nagano, 380-8553, Japan
Keywords:
Domain-Specific Language, Modeling Education, Simulation, State Machine Diagram, Testing, Unified
Modeling Language.
Abstract:
In state machine modeling education, the effort required by instructors to test a large number of learner-
created models should be reduced to concentrate on the following feedback activity. Although there are several
methods for validating and verifying a state machine model, a considerable problem for instructors is the lack
of tools to test multiple models at once. This study proposes a preliminary approach and a support tool
to efficiently and promptly test multiple state machine models. A basic approach to solving this problem
is creating test cases and then testing multiple state machine models simultaneously using these test cases.
To reduce the instructors’ testing effort, the proposed approach includes three new concepts: (1) a logger
extension to capture simulated data generated by an existing state machine simulation tool called SMart-
Learning; (2) a method for creating test cases based on these logs; and (3) a feature to test many models using
these test cases. As a result of a preliminary evaluation, it was confirmed that the proposed approach could be
useful to test many answer models efficiently.
1 INTRODUCTION
Modeling education has become more important by
entering the Cyber-Physical Systems (CPSs) era.
Large scale CPSs often include geo-distributed phys-
ical components (Hu et al., 2019; Peng and Ho,
2018; Tranoris et al., 2018; Gupta and Ramachan-
dran, 2018; D’souza and Rajkumar, 2017; Saurez
et al., 2016; Khalaf and Abdalla, 2016). Develop-
ers find hard to test these physical components due to
the cost and limitation of their deployment. Thus, the
logical validation and verification of such CPSs have
become increasingly important.
The state machine diagram notation provided by
Unified Modeling Language (UML) (Object Man-
agement Group, 2017b) and OMG System Model-
ing Language (SysML) (Object Management Group,
2017a) is often used to define the life-cycle of CPS
components (Graja et al., 2018; Vidal and Villota,
2018; Pencheva and Atanasov, 2016). Furthermore,
methods to validate and verify state machine dia-
grams (itemis AG, 2019; Bagherzadeh et al., 2017;
Das et al., 2016) and convert state machine diagrams
into models used by model checking tools (Damjan
and Vatanawood, 2017; Nobakht and Truscan, 2013)
have been proposed in the past. Model checking tools
such as SPIN (Holzmann, 1997) and UPPAAL (David
et al., 2015) can exhaustively check whether a system
model meets its specifications. Therefore, it is impor-
tant for developers to learn state machine modeling.
It is difficult for novices to correctly understand
and perform state machine modeling, even if there is
a checking environment, owing to the lack of their
knowledge regarding the model or the checking envi-
ronment (Ogata et al., 2017). Therefore, the instruc-
tors must check learner-created models to give feed-
back to the learners. Although there are methods to
make the efficient validation or verification of state
machine diagrams (itemis AG, 2019; Bagherzadeh
et al., 2017; Das et al., 2016; Ogata et al., 2017),
these methods cannot be applied to multiple models
simultaneously. Thus, the instructors need to perform
check operations repeatedly for the number of learn-
ers.
To improve this problem, this study proposes a
preliminary approach to test a large number of state
machine models created by learners, and also a sup-
port tool extending the educational model simula-
tion tool called SMart-Learning (Ogata et al., 2017).
A basic idea to solve the problem is to create test
cases with which multiple state machine models are
tested simultaneously. To reduce the instructors’ test-
ing effort, the proposed approach includes three new
concepts: (1) a logger extension to capture simula-
tion data generated by the SMart-Learning tool; (2) a
method to create test cases based on these logs; and
Ogata, S., Kayama, M. and Okano, K.
Approach to Testing Many State Machine Models in Education.
DOI: 10.5220/0007768004810488
In Proceedings of the 11th International Conference on Computer Supported Education (CSEDU 2019), pages 481-488
ISBN: 978-989-758-367-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
481

(3) a feature for testing many models using the test
cases. As a result of a preliminary evaluation, the
possibility that the proposed approach is useful to test
many answer models efficiently was confirmed.
The rest of the paper is organized as follows. Sec-
tion 2 discusses the problems of state machine model-
ing in learning. Section 3 presents the characteristics
of state machine diagrams used in this study. Sec-
tion 4 proposes a preliminary approach to test a large
number of state machine models efficiently, and intro-
duces a tool extending the SMart-Learning tool. Sec-
tion 5 reports the result of a preliminary evaluation
regarding the degree that the proposed approach can
predict each correctness of many state machine mod-
els answered by learners. Section 6 discusses the ef-
fectiveness of the proposed method and future work.
Section 7 compares the proposed approach with re-
lated work and, finally, we conclude the paper in Sec-
tion 8.
2 PROBLEMS OF STATE
MACHINE MODELING IN
LEARNING
Novice modelers usually do not precisely understand
the notation of state machine models when they start
to learn. The novices start to understand the nota-
tion by reading textbooks or by listening to lectures
regarding the subject. However, when they want to
know whether their own model is problematic, in
most case, the only way they have is to hear the spe-
cialists such as the instructors regarding the model.
In (Ogata et al., 2017), the educational state machine
simulation tool called SMart-Learning is proposed, to
assist such learners to self-check the models. How-
ever, when the learners cannot understand precisely
the usage or output of the visual simulation, the tool
is difficult to assist them to perform self-checking.
Therefore, it is still important for the learners to re-
ceive feedback on their model from the instructors.
However, the instructors’ effort of checking a
large number of learner-created models is consider-
able and very time-consuming. It is very hard for
the instructor to concentrate on the following feed-
back activity. Although there are some methods for
validating and verifying a state machine model(itemis
AG, 2019; Bagherzadeh et al., 2017; Das et al., 2016;
Ogata et al., 2017), these methods do not provide a
feature to test multiple models at once, and the in-
structors have to repeat these operations for the num-
ber of learners. A basic idea to improve this problem
is to create test cases and test multiple state machine
models at once using these test cases. Therefore, we
aim to establish a method of testing taking the ease
of creation and test into account. A key new idea
is to reuse simulation logs outputted by the SMart-
Learning tool in order to create executable test cases.
A merit of this idea is that not only instructors but also
learners may easily create executable test cases.
3 STATE MACHINE DIAGRAMS
IN THE LECTURE
The state machine diagram is used for modeling
discrete event-driven behaviors (Object Management
Group, 2017b). In this lecture, the learners create ex-
tended state machine diagrams for line trace robots
and then test their diagrams by running the robots
with C++ programs generated from the diagrams. The
extension implies introducing DSL, communication,
and scripts into state machine diagrams.
Regarding the DSL, the values of do activity, e.g.
turnRight, and trigger, e.g. detectBlackColor,
are selected from the respective terminologies, which
can be translated into code fragments, and a DSL
model can be transformed into a complete program.
Regarding the communication, it synchronizes the
timing of state transitions between different transi-
tions, and is represented using messages between the
senders and the receivers. A transmitted message, e.g.
in! is written in a effect with an exclamation mark.
A received message, e.g. in? is written in a trigger
with a question mark. The alphabets must be the same
between these corresponding messages.
Regarding the scripts, the value of guard, e.g.
count==1, and action, e.g. count++; is written us-
ing JavaScript syntax. When such scripts are sim-
ple, we consider that the differences between lan-
guages such as JavaScript and C++ are negligible.
The SMart-Learning tool automatically extracts the
variables from guard and effect. These scripts, in-
cluding the variables, will be embedded in the pro-
gram generated directly. Hereafter, the state machine
diagram implies the extended state machine diagram.
4 PROPOSED APPROACH
This section describes our proposed approach and
presents an extension of the SMart-Learning tool,
called SMart-Learning for Instructor (SML4I) tool.
CSEDU 2019 - 11th International Conference on Computer Supported Education
482

4.1 Overview
Figure 1 shows an overview of the proposed ap-
proach. All the steps are listed as follows:
1. The instructors create the reference model of
modeling tasks and then assign the tasks to learn-
ers.
2. The instructors simulate the reference model us-
ing the SML4I tool and then obtain the resulting
simulation logs for creating the test case. The sim-
ulation using the SML4I tool is detailed in Section
4.2. The logger extension as a new part of our pro-
posed approach is detailed in Section 4.3.
3. The instructors abstract the simulation logs to cre-
ate the test case. The test case creation is detailed
in Section 4.4.
4. The learners create their answer model of the
same task and then check the model using the
SML4I tool.
5. The learners submit the model to the instructors
after refining the model appropriately.
6. The instructors test all the submitted models using
the SML4I tool. The testing is detailed in Section
4.5.
7. The instructors analyze each model after testing
them and then provide feedback to the learners.
4.2 Model Simulation
The model simulation features of the SML4I tool have
already been concluded in (Ogata et al., 2017), and
are explained briefly in this paper. The guideline of
the SML4I tool is that learners can concentrate on
modeling state machines and make it easy to use in
education. The SML4I tool takes a few easy steps to
start to simulate a state machine model immediately
after creating only state machine diagrams.
Figure 2 shows the feature to prepare the model
simulation, called State Machine Instance Config-
urator (SMIC). The “QUICK SETTING” function
automatically generates all classes as the context
of state machine diagrams and attributes as vari-
ables. Furthermore, the SMIC feature can create
multiple instances of a state machine diagram. In
Fig. 2, PriorityCar.state1:PriorityCar.state
shows one instance of the state machine diagram
PriorityCar.state.
The SML4I tool provides three types of model
simulators. However, only the most basic simulator
will be described because it is sufficient to explain
the new part of the tool. Figure 3 shows the State
Machine Manual Simulator (SMMS). By using the
SMMS function, the users can input a sequence of
events to make the state machine instances behave.
The users can select an event from the buttons at the
bottom left panel in Figure 3 and input it to state ma-
chine instances.
The state machine instance under simulation is
shown in the top view of Figure 3. The states and
transitions filled with red indicate the current state
and the latest transition, respectively. The bottom
center panel displays the values referred by the vari-
ables used in the scripts. The values are automati-
cally updated by accessing the Java ScriptEngine in-
stance whenever inputting an event to the state ma-
chine instances. The syntax of an event is <event
name><instance scope> The instance scope deter-
mines state machine instances to provide to the event.
The <instance scope> expression is further catego-
rized into three types: <all instances>, i.e. “”, <a
type of instances>, e.g. “::NormalCar.state”, or <an
instance>, e.g. “::NormalCar.state1”.
4.3 Logger Extension
This logger extension captures three types of logs: in-
stance configuration, event logs, and transition logs.
The left side of Figure 4 shows an example of sim-
ulation logs. The list of [configuration] spec-
ifies what instances are needed in the test. The
instance configuration corresponding to the list of
[configuration] is captured when the state ma-
chine instances are created using the SMIC function.
The list of [events] specifies a sequence
of events to input. The list of [expected]
specifies the expected result consisting of one
or more steps. A step consists of 6 items:
<state machine instance>, <transition source>,
<event>, <guard>, <effect>, <transition target>.
An example is PriorityCar.state1, rightTurn,
detectBlackColor, , !, goForward. The event
and transition logs corresponding to the list of
[events] and [expected], respectively, are cap-
tured whenever inputting an event to the state machine
instances during simulation.
4.4 Test Case Creation
Instructors abstract the simulation logs to create test
cases because the logs are likely to be specialized to
the reference model. A basic abstraction strategy is to
remove the elements which may be freely determined
by learners. For instance, the message names of com-
munication, scripts, and pseudo-states, such as ini-
tial pseudo-states, are candidates to be removed. The
right side of Figure 4 shows the test case extracted
Approach to Testing Many State Machine Models in Education
483
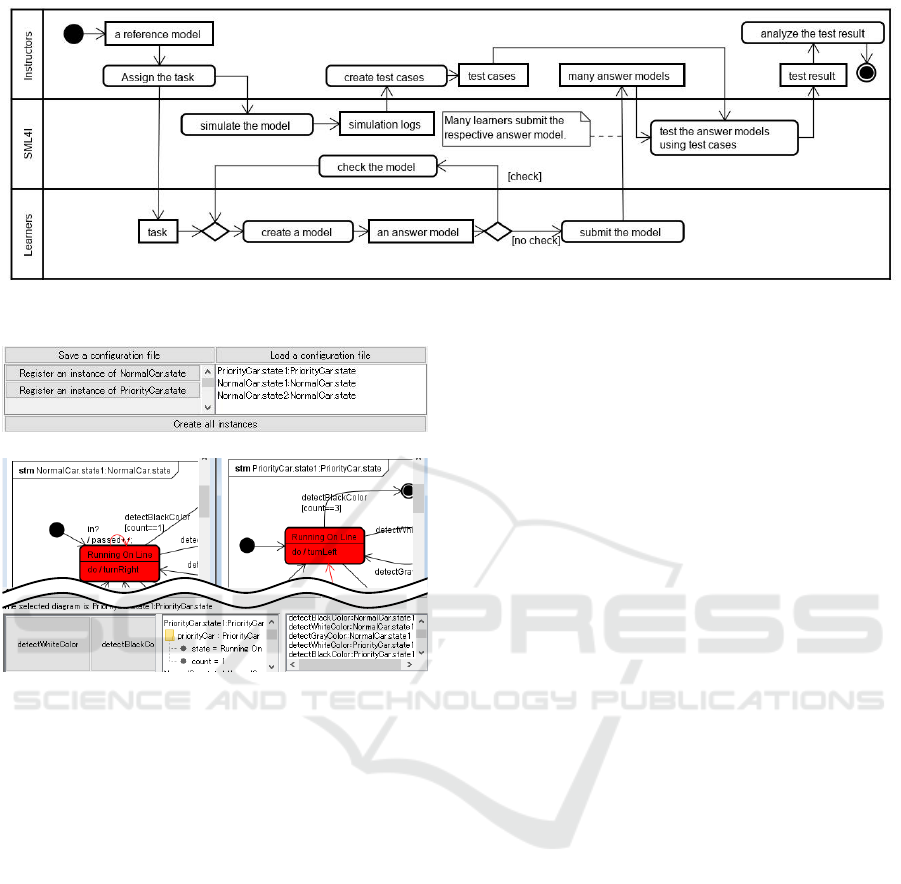
Figure 1: Overview of the proposed approach.
Figure 2: State machine instance configurator.
Figure 3: State machine manual simulator.
from the logs on the left side. Although there is the
possibility that the SML4I tool can assist instructors
to extract the simulation logs based on the strategy
mentioned above, this feature will be established in a
future work.
4.5 Testing
The SML4I tool tests each answer model using given
test cases. The procedure to test the models is as fol-
lows.
1. The tool instantiates state machines based on the
instance configuration of the test case.
2. The tool extracts the sequence of the events from
the test case and inputs those events to the in-
stances.
3. The tool checks to what extent the execution result
fulfills the expected result. When the expected re-
sult is completely fulfilled, the tool assumes that
the test case passed. Otherwise, the tool assumes
that the test case failed.
The steps to check whether the expected result
was fulfilled or not is explained in detail below. Fig-
ure 5 shows the overview of these steps.
1. Each step of an expected result is apportioned into
the step group corresponding a state machine in-
stance in order. The state machine instance can be
identified by the <state machine instance> value
at each step.
2. The step extracted from the latest transition of
the simulator (hereafter, called a simulator step)
is compared with the next step of the expected re-
sult (hereafter, called test case step) whenever in-
putting an event to the simulator. The step group
to compare with can be identified by the <state
machine instance> value. The next step can be
identified by getting the next step of the last ful-
filled step. The steps in each step group have to
be fulfilled in order.
3. When the simulator step matches with the test
case step, the test case step is assumed to be ful-
filled. To check the fulfillment, the SML4I tool
checks whether every item of the simulator step
contain the corresponding item of the test case
step. For instance, when the <event> value of
a simulator step is message? and the <event>
value of a test case step is ?, the item of the test
case step is assumed to be fulfilled, since the for-
mer contained the latter. If the simulator step does
not match with the test case step, the simulator
step is ignored and then Step 2 is performed for
the next simulator step. Step 2-3 are performed
iteratively until all simulator steps are processed.
4. When all steps in the expected result are fulfilled,
the test case is assumed to pass. Otherwise, the
test case is assumed to fail.
CSEDU 2019 - 11th International Conference on Computer Supported Education
484

[configuration]
PriorityCar.state
NormalCar.state
NormalCar.state
[events]
detectBlackColor::NormalCar.state1
detectWhiteColor::NormalCar.state1
detectGrayColor::NormalCar.state1
[expected]
PriorityCar.state1,initial,,,,leftTurn
NormalCar.state1,initial,,,,rightTurn
NormalCar.state2,initial,,,,rightTurn
NormalCar.state1,rightTurn,detectBlackColor,count!=1&&passed%2==0,count++;,goForward
NormalCar.state1,goForward,detectWhiteColor,,,rightTurn
NormalCar.state1,rightTurn,detectGrayColor,,,rightTurn
PriorityCar.state1,leftTurn,detectWhiteColor,,,rightTurn
PriorityCar.state1,rightTurn,detectBlackColor,,in!count++;,goForward
NormalCar.state1,rightTurn,in?,,passed++;,rightTurn
NormalCar.state2,rightTurn,in?,,passed++;,rightTurn
[configuration]
PriorityCar.state
NormalCar.state
NormalCar.state
[events]
detectBlackColor::NormalCar.state1
detectWhiteColor::NormalCar.state1
detectGrayColor::NormalCar.state1
[expected]
NormalCar.state1,rightTurn,detectBlackColor,,,goForward
NormalCar.state1,goForward,detectWhiteColor,,,rightTurn
NormalCar.state1,rightTurn,detectGrayColor,,,rightTurn
PriorityCar.state1,leftTurn,detectWhiteColor,,,rightTurn
PriorityCar.state1,rightTurn,detectBlackColor,,!,goForward
NormalCar.state1,rightTurn,?,,,rightTurn
NormalCar.state2,rightTurn,?,,,rightTurn
Abstraction
(remove)
Simulation logs A test case
Figure 4: Abstraction of simulation logs to create a test case.
[expected]
NormalCar.state1,rightTurn,detectBlackColor,,,goForward
NormalCar.state1,goForward,detectWhiteColor,,,rightTurn
NormalCar.state1,rightTurn,detectGrayColor,,,rightTurn
PriorityCar.state1,leftTurn,detectWhiteColor,,,rightTurn
PriorityCar.state1,rightTurn,detectBlackColor,,!,goForward
NormalCar.state1,rightTurn,?,,,rightTurn
NormalCar.state2,rightTurn,?,,,rightTurn
A test case
[expected]
NormalCar.state1,rightTurn,detectBlackColor,,,goForward
NormalCar.state1,goForward,detectWhiteColor,,,rightTurn
NormalCar.state1,rightTurn,detectGrayColor,,,rightTurn
NormalCar.state1,rightTurn,?,,,rightTurn
[expected]
PriorityCar.state1,leftTurn,detectWhiteColor,,,rightTurn
PriorityCar.state1,rightTurn,detectBlackColor,,!,goForward
[expected]
NormalCar.state2,rightTurn,?,,,rightTurn
NormalCar.state1
PriorityCar.state1
NormalCar.state2
Fulfilled steps
Unfulfilled steps
The next steps
=
∑
=1
∑
=1
=
2 + 1 + 0
4 + 2 + 1
≈0.43
= 1
= 2
= 3
= 3
1
= 4
steps
∶Fulfillment
∶Num of Fulfilled Steps of instance i
∶Num of Total Steps of instance i
1
= 2
2
= 2
2
= 1
3
= 1
3
= 0
= �
1, = 1
0, < 1
∶The reuslt of a test
= 1 means "passed"
= 0 means "fail ed"
Figure 5: Overview of checking the fulfillment.
5 PRELIMINARY EVALUATION
The proposed approach was preliminarily evaluated
to determine its potential effectiveness. In this evalu-
ation, we checked how the SML4I tool correctly pre-
dicted each of the 73 answer models.
5.1 Overview
The SML4I tool was prototyped using the model ed-
itor astah (Change Vision, 2019), and it was used to
check 73 answer models created by the learners. Each
of these 73 models was created to achieve the task
shown in Figure 6. These robots run alternately. One
robot (R1) first starts to run on a white line and then
stops when it detects a gray line. R1 sends a sig-
nal to the other robot (R2) immediately after stop-
ping. When R2 receives the signal, it starts to run
on a gray line and then stops when it detects a white
line. In Similarly, R1 starts to run immediately after
R2 stops. After R1 detects a gray line three times,
R2 completely stops and R1 starts to run backward.
Then, when R1 detects the change of color, it stops
練習課題2
• 動き方
2015/11/4
2016形式的システムモデリング
32
R1
R2
Figure 6: Image of the task of modeling two line trace
robots.
for 2 seconds. After R1 detects a gray line three times,
R1 completely stops.
We used one of the correct answer models as
the reference model in this evaluation because we
avoided decreasing the objectiveness from this eval-
uation and showed the ease of use of the proposed
approach. We defined one test case by obtaining and
abstracting the simulation logs of one simulation of
the reference model. The test case was abstracted by
the experimenter using the basic strategy mentioned
above, and it represented the basic flow of the pro-
cesses and interactions of the two robots to achieve
the task.
Approach to Testing Many State Machine Models in Education
485

Table 1: Confusion matrix based on the evaluation result.
Prediction
Positive Negative Total
Actual
Positive TP(10) FN(14) 24
Negative FP(2) TN(47) 49
Total 12 61 73
TP : True Positive, FP : False Positive, FN : False
Negative, TN : True Negative.
The result of the evaluation is shown as a confu-
sion matrix (Table 1). When a state machine model
conforms to the notation and passes the test case, it
is assumed to be positive, i.e., correct. Otherwise, a
state machine model is assumed to be negative, i.e.,
incorrect.
5.2 Result
Table 1 shows the confusion matrix as the result of the
evaluation. The recall, precision and accuracy values
are calculated from the number of TP, FP, TN, and FN
in the matrix and are as follows.
Recall =
T P
T P + FN
≈ 0.42
Precision =
T P
T P + FP
≈ 0.83
Accuracy =
T P + T N
T P + FP + T N + FN
≈ 0.78
On one hand, 13 out of the 73 models passed the
test case, but 1 out of the 13 passed models had nota-
tion errors. As a result, the number of predicted posi-
tive models was 12. On the other hand, 24 out of the
73 models were manually evaluated as positive. Con-
sequently, the recall value became low in comparison
with the other values.
A cause of the low recall value was that the mod-
eling strategy was varied among the correct answer
models. The modeling strategy included the divisions
of states and the selection of events to transit states.
Consequently, the correct answer models being sim-
ilar to the reference model were correctly predicted;
otherwise, they were incorrectly predicted.
6 DISCUSSION
Our final objective is to pertinently identify the causes
of the errors contained in all answer models so that the
instructors can concentrate on the following feedback
activity. As one of the fundamentals toward achieving
this objective, the correctness of answer models must
be correctly predicted.
The proposed approach showed a good result in
terms of the precision and accuracy values because
they reached approximately 80% in the evaluation.
More than half of the correct models could not be pre-
dicted by one test case. Therefore, this problem was
planned using multiple test cases and the threshold
of the test result, because the modeling strategy was
varied among the correct answer models. We plan to
exhaustively analyze the answer models and consider
how to create appropriate test cases to more precisely
predict the correctness of the models.
As future work, to achieve the final objective,
techniques to exhaustive analyze state machine mod-
els must be established. For instance, some of the ma-
jor challenges are the generation and abstraction of
sufficient number of adequate test cases. Regarding
the generation of the test cases, MBT (Model-Based
Testing) techniques are one of the effective methods
to obtain test cases taking the coverage into account.
Toward automating test case creation, we plan to use
such techniques to efficiently create valid test cases.
Regarding the abstraction of test cases, there ex-
ists the possibility of utilizing the notation. This is a
natural idea because the notation, such as DSL, is usu-
ally customized depending on the tasks. If the com-
mon definition among answer models can be iden-
tified from the notation, the simulation logs can be
automatically abstracted based on the strategy men-
tioned above.
Additionally, to detect the causes of the errors in
the incorrect answer models, we plan to analyze the
checking process of the fulfillment and then propose
an analysis method based on the result. One possible
method to detect the causes is to define patterns for
how to fulfill or not to fulfill expected results and then
predict the causes based on the pattern. In addition,
metrics to measure the process in which the expected
results are fulfilled will also be considered.
7 RELATED WORK
Educational approaches adopting Model-Driven De-
velopment (MDD) or Model-Based Development
(MBD) process including state machine modeling
have been practiced in Project-Based Learning (PBL)
projects (Akayama et al., 2013; Arya et al., 2017),
with excellent guidelines. However, they have not
provided tools to evaluate a large number of state ma-
chine models efficiently. Our study proposed an ap-
proach and the SML4I tool for improving this prob-
lem.
CSEDU 2019 - 11th International Conference on Computer Supported Education
486

(Arya et al., 2017) presented test cases to test state
machine diagrams. For instance, the input of such
test cases comprised only events, the combination of
events and states, and so on (Arya et al., 2017; Hamon
et al., 2005). In addition, such test cases were gen-
erated from state machine diagrams or spreadsheets
(Hamon et al., 2005; Mujjiga and Sukumaran, 2007)
using a tool, e.g. SAL(Symbolic Analysis Labora-
tory)(Moura et al., 2004). Our study aims to propose
a useful method of testing various answer models by
using test cases. As far as we know, there is no study
aiming the automation of testing multiple state ma-
chine models at once.
An environment using a multi-touch interface has
been proposed for aiding collaborative learning of
UML modeling including state modeling (Basheri
et al., 2012; Basheri et al., 2013). A method for cre-
ating state machine diagrams based on an initial class
diagram and texts describing class behavior have been
proposed (Choppy and Reggio, 2009). A method for
assessing a solution activity diagram based on a ref-
erence according to trace information has been pro-
posed (Striewe and Goedicke, 2014). Our study aims
to evaluate many state machine diagrams to efficiently
improve the cost-performance of feedback creation.
Thus, the objective of our approach differs from those
of existing works.
8 CONCLUSION
In this paper, we proposed a preliminary approach to
efficiently test a large number of answer models cre-
ated by learners. In the evaluation, the result showed
that the correctness of the answer models can be pre-
dicted with a high percentage of accuracy, i.e., ap-
proximately 78%. This fact suggests the possibility
that problem detection for a large number of models
can be efficiently performed through sufficient tests in
the future.
Meanwhile, there are several major challenges re-
maining. As future work, we will compare the answer
models with the reference model in detail, to clarify
the cause of differences between the manual evalua-
tion results and testing results. We will also analyze
the process of the fulfillment of the expected results
for each answer model in detail, to explore a method
to predict the errors and these causes. Subsequently,
we will improve the proposed approach based on the
analysis results. Furthermore, we plan to use the ex-
isting MBT methods to create test cases more effi-
ciently and utilize the state machine to abstract simu-
lation logs more efficiently.
ACKNOWLEDGMENT
This work was supported by JSPS KAKENHI Grant
Numbers JP16H03074, and JP16K00094.
REFERENCES
Akayama, S., Kuboaki, S., Hisazumi, K., Futagami, T., and
Kitasuka, T. (2013). Development of a modeling ed-
ucation program for novices using model-driven de-
velopment. In WESE’12, Workshop on Embedded
and Cyber-Physical Systems Education, pages 4:1–
4:8. ACM.
Arya, K., Coelho, B., and Pandya, S. (2017). A model based
design approach to system building using the e-yantra
educational robot. SIGBED Rev., 14(1):37–43.
Bagherzadeh, M., Hili, N., and Dingel, J. (2017). Model-
level, platform-independent debugging in the con-
text of the model-driven development of real-time
systems. In ESEC/FSE’17, 11th Joint Meeting on
Foundations of Software Engineering, pages 419–430.
ACM.
Basheri, M., Burd, L., and Baghaei, N. (2012). In
OzCHI’12, 24th Australian Computer-Human Inter-
action Conference, pages 30–33. ACM.
Basheri, M., Munro, M., Burd, L., and Baghaei, N. (2013).
Collaborative learning skills in multi-touch tables for
uml software design. International Journal of Ad-
vanced Computer Science and Applications, 4(3):60–
66.
Change Vision (2019). Astah. http://astah.net/.
Choppy, C. and Reggio, G. (2009). A method for develop-
ing uml state machines. In SAC’09, ACM Symposium
on Applied Computing, pages 382–388. ACM.
Damjan, P. and Vatanawood, W. (2017). Translating uml
state machine diagram into promela. In IMECS’17, In-
ternational MultiConference of Engineers and Com-
puter Scientists, volume I. IAENG.
Das, N., Ganesan, S., Jweda, L., Bagherzadeh, M., Hili, N.,
and Dingel, J. (2016). Supporting the model-driven
development of real-time embedded systems with run-
time monitoring and animation via highly customiz-
able code generation. In MODELS’16, 19th Interna-
tional Conference on Model Driven Engineering Lan-
guages and Systems, pages 36–43. ACM/IEEE.
David, A., Larsen, K. G., Legay, A., Miku
ˇ
cionis, M., and
Poulsen, D. B. (2015). Uppaal smc tutorial. Inter-
national Journal on Software Tools for Technology
Transfer, 17(4):397–415.
D’souza, S. and Rajkumar, R. R. (2017). Time-based coor-
dination in geo-distributed cyber-physical systems. In
HotCloud’17, 9th USENIX Workshop on Hot Topics
in Cloud Computing. USENIX Association.
Graja, I., Kallel, S., Guermouche, N., Cheikhrouhou, S.,
and Hadj Kacem, A. (2018). A comprehensive sur-
vey on modeling of cyber-physical systems. Con-
currency and Computation: Practice and Experience,
page e4850.
Approach to Testing Many State Machine Models in Education
487

Gupta, H. and Ramachandran, U. (2018). Fogstore: A geo-
distributed key-value store guaranteeing low latency
for strongly consistent access. In DEBS’18, 12th ACM
International Conference on Distributed and Event-
based Systems, pages 148–159. ACM.
Hamon, G., De Moura, L., and Rushby, J. (2005). Auto-
mated test generation with sal. CSL Technical Note,
SRI International.
Holzmann, G. J. (1997). The model checker spin. IEEE
Trans. Softw. Eng., 23(5):279–295.
Hu, F., Liu, Q., Wu, J., and Yao, J. (2019). Minimizing geo-
distributed interactive service cost with multiple cloud
service providers. IEEE Access, 7:3320–3335.
itemis AG (2019). Yakindu statechart tools. Retrieved from
https://www.itemis.com/en/yakindu/statechart-tools.
Khalaf, A. A. and Abdalla, A. H. (2016). Analysis of cost
minimization methods in geo-distributed data cen-
ters. In ICCCE’16, International Conference on Com-
puter and Communication Engineering, pages 241–
245. IEEE.
Moura, L. d., Owre, S., Rueß, H., Rushby, J., Shankar, N.,
Sorea, M., and Tiwari, A. (2004). Sal 2. In Alur, R.
and Peled, D. A., editors, Computer Aided Verifica-
tion, pages 496–500. Springer Berlin Heidelberg.
Mujjiga, S. and Sukumaran, S. (2007). Modelling and test
generation using sal for interoperability testing in con-
sumer electronics. In AFM’07, Second Workshop on
Automated Formal Methods, pages 32–40.
Nobakht, M. and Truscan, D. (2013). Tool support for trans-
forming uml-based specifications to uppaal timed au-
tomata. Technical Report 1087, TUCS.
Object Management Group (2017a). OMG sys-
tem modeling language 1.5. Retrieved from
https://www.omg.org/spec/SysML/1.5/PDF.
Object Management Group (2017b). Unified
modeling language 2.5.1. Retrieved from
https://www.omg.org/spec/UML/2.5.1/PDF.
Ogata, S., Kayama, M., and Okano, K. (2017). SMart-
Learning: State machine simulators for developing
thinking skills. In ICALT’17, 17th International Con-
ference on Advanced Learning Technologies, pages
81–83. IEEE.
Pencheva, E. and Atanasov, I. (2016). Engineering of web
services for internet of things applications. Informa-
tion Systems Frontiers, 18(2):277–292.
Peng, L. and Ho, P. (2018). A novel framework of dis-
tributed datacenter networks to support intelligent ser-
vices: Architecture, operation, and solutions. IEEE
Access, 6:77485–77493.
Saurez, E., Hong, K., Lillethun, D., Ramachandran, U., and
Ottenw
¨
alder, B. (2016). Incremental deployment and
migration of geo-distributed situation awareness ap-
plications in the fog. In DEBS’16, 10th ACM Inter-
national Conference on Distributed and Event-based
Systems, pages 258–269. ACM.
Striewe, M. and Goedicke, M. (2014). Automated assess-
ment of uml activity diagrams. In ITiCSE’14, Con-
ference on Innovation & Technology in Computer Sci-
ence Education, pages 336–336. ACM.
Tranoris, C., Denazis, S., Guardalben, L., Pereira, J., and
Sargento, S. (2018). Enabling cyber-physical sys-
tems for 5g networking: A case study on the automo-
tive vertical domain. In SEsCPS’18, 4th International
Workshop on Software Engineering for Smart Cyber-
Physical Systems, pages 37–40. IEEE/ACM.
Vidal, E. J. and Villota, E. R. (2018). Sysml as a tool for
requirements traceability in mechatronic design. In
ICMRE’18, 4th International Conference on Mecha-
tronics and Robotics Engineering, pages 146–152.
ACM.
CSEDU 2019 - 11th International Conference on Computer Supported Education
488
