
Towards Readability Aspects of Probabilistic Mode Automata
Heinz Schmidt and Maria Spichkova
School of Science, RMIT University, Melbourne, Australia
Keywords:
Software Engineering, Formal Methods, Petri Nets.
Abstract:
This paper presents a new approach and design model targeting hybrid designer- and operator-defined perfor-
mance budgets for timing and energy consumption. The approach is based on Petri Nets formalism. As the
cognitive load is typically high while using formal methods, this increases the chances of mistakes. Our ap-
proach is focused on the readability aspects and aims to decrease the cognitive load of developers. We illustrate
the proposed approach on example of a sample embedded multi-media system, a modern digital camera.
1 INTRODUCTION
In the domain of embedded systems, the trend to en-
hance more and more system functionalities through
software solution is constantly increasing. This
makes the design of these systems and the corre-
sponding quality assurance more and more challeng-
ing Sangiovanni-Vincentelli and Martin (2001). Real-
time and dependability constrains provide additional
challenges, which also lead to necessity of probabilis-
tic analysis within the phases of design and verifica-
tion of these systems. Also, some constraints within
embedded systems are mutually dependent, for ex-
ample, timing and energy consumption constraints
cannot be analysed independently of each other, see
Mudge (2001); Saxe (2010); Wolf et al. (2008).
One of the successfully applied paradigms is
Component-based software development, which was
initially introduced many decades ago (CBSD, see
Adler (1995); Clements (1995)). However, CBSD
cannot solve directly issues related to the constraints
on safety, timing, energy consumption, etc. Henzinger
and Sifakis (2006); Spichkova et al. (2012), but can
provide a solid basis for extended approaches.
In recent work Peake and Schmidt (2011) we
have extended our rich architecture definition lan-
guage (RADL, see Schmidt (2003)) and underlying
theory Schmidt et al. (2003) to meet such indus-
trial requirements, aiming at a scalable and compo-
sitional (component-based) approach to soft depend-
ability guarantees: with probability, guarantee risk,
execution time, cost etc. Industrial practice requires
the capability to compose a variety of heterogeneous
models and components, specified and designed using
different methods and frameworks. Many real-world
engineering environments are not locked into a sin-
gle model, single framework or single-language en-
vironment. While we abstract from the programming
languages underlying such an heterogeneous software
engineering approach, we hope to show that, and how,
our design-oriented model-based approach links with
concrete programming by means of elementary mod-
elling blocks providing abstractions directly for code
blocks. This is natural and perhaps more appropriate
in design of embedded systems than in other fields, as
component models in this context often use architec-
tural elements to abstract from software and hardware
blocks at the same time. However we expect that this
approach carries across to other domains.
In our current work, we targeting hybrid designer-
and operator-defined performance budgets for timing
and energy consumption. We propose an approach
that is on Petri Nets formalism. Our approach is fo-
cused on the readability aspects and aims to decrease
the cognitive load of developers, as having high cog-
nitive load increases the chances of mistakes in sys-
tem design and quality assurance process. We also
aim to keep the method lightweight, following the
classification presented in Zamansky et al. (2018).
To illustrate the proposed approach, we use an ex-
ample of a sample embedded multi-media system, a
modern digital camera. This allows us to demon-
strate how the time (and the ensuing synchronisa-
tion) and energy constraints can be analysed taking
into account their mutual dependencies. We pro-
pose that extra-functional properties have to be con-
sidered from early performance requirement specifi-
cation through to model-based testing and run-time
Schmidt, H. and Spichkova, M.
Towards Readability Aspects of Probabilistic Mode Automata.
DOI: 10.5220/0007781005550562
In Proceedings of the 14th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2019), pages 555-562
ISBN: 978-989-758-375-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
555

verification. Beside the compositional approach to
reasoning about and testing such properties in a hy-
brid modelling environment, our contribution is in
the separation of concern of different aspects of mod-
elling and in context-dependent methods of reasoning
about such properties. Notably we have developed
methods which allow automated contextual resource
allocation strategies, under dynamically varying, and
suitably parameterised, architectural configurations.
2 EXAMPLE: DIGITAL CAMERA
Consider the design of a modern digital camera from
the perspective of different types of use:
Scenario 1: A busy professional sports photogra-
pher requires the ability to capture many hundreds or
thousands of high quality images rapidly, with mini-
mal shutter lag, in rapid bursts of up to 100 photos.
Within the given price point afforded by budget, she
is prepared to sacrifice “convenience” features, ac-
cepting shorter battery life and fewer shots per mem-
ory card while carrying extra battery packs, memory
cards or even a laptop for frequent uploads, as well as
extra lenses, and manage reconfiguration as needed.
Scenario 2: One weekend a family member is get-
ting married, and as the de facto camera expert she
has agreed to act as a semi-official or backup pho-
tographer for the wedding. In this capacity she aims
for simplicity and convenience, so she can still en-
joy the day and mingle without being conspicuous or
weighed down by equipment. The couple insist they
prefer photos in a standard compressed consumer for-
mat (JPEG), which at least eliminates extra effort later
at her workstation, and maximises memory card ca-
pacity. She selects what she can carry easily—a sin-
gle camera body and lens and perhaps a single addi-
tional memory card, but no extra battery pack. She is
unwilling to spend anything like her usual time and
effort on camera configuration, instead often (perhaps
not always) relying on camera to automatically select
exposure, focus and aperture. Occasionally, for par-
ticularly important shots she takes full control again.
In this second case, battery life is paramount.
The specific challenge is to design a camera which
is capable of flexible reconfiguration to suit multiple
contexts, including for example these. The generic
challenge is to:
(i) Characterise context in terms of user con-
figuration choices, usage (e.g. selected
modes/operations/functions) and user-visible
desired properties.
(ii) Reason in a context-sensitive way about system
properties and manage internal configuration to
ensure consistency between configuration/profiles
and desired properties. For example, to make the
camera battery last longer, the camera must some-
how sacrifice quality and/or performance in an ac-
ceptable way.
However the true usage context is often hard to pre-
dict. What exactly are the user’s requirements and
intentions? Even the user may not know exactly what
she intends beyond the immediate moment. Con-
textual uncertainty extends to environmental condi-
tions, which may have a non-trivial impact on per-
formance. For example ambient temperature may af-
fect performance (e.g., energy consumption) of key
camera components significantly, including batter-
ies Rao et al. (2003), sensors and actuators such as
lenses. This has implications for the design not only
of embedded systems, but also at a macroscopic level.
Thus, large-scale computing centres have significant
inter-dependency on their local environment; such fa-
cilities are already planned with environmental condi-
tions such as temperature in mind to be able to max-
imise performance and performance per cost while
minimising cooling and energy consumption.
We extend the camera design presented by
Lee Lee (2006). In our example, the camera has the
following logical components:
• a general purpose processor (GPP),
• a digital signal processor (DSP),
• actuators to control, e.g., mirror and shutter cur-
tain, lens focus and aperture,
• sensors, e.g., for auto-focus,
• a buffer to store images temporarily, and
• a flash memory as a long-term storage media.
To keep the example small enough for a conference
paper, we abstract from other typical functions such
as USB driver for photo download, LCD user inter-
face, camera flashbulb, and various advanced settings.
In high performance scenarios a dedicated GPP-
flash memory link is possible. We focus on the in-
terplay of functionality relevant for taking a range of
different shots involving real-time physical control, as
well as selecting tradeoffs between timing and energy
consumption.
As presented in Figure 1, the system has three
modes, each with different resource requirements:
• IDLE mode covers waiting for shutter half/full
press and pre-focusing.
• In single frame (SF) mode, the camera returns to
the idle mode after shooting is completed, while
• in multi frame (MF) mode, shooting is contin-
ued as long as the shutter release button is kept
pressed.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
556
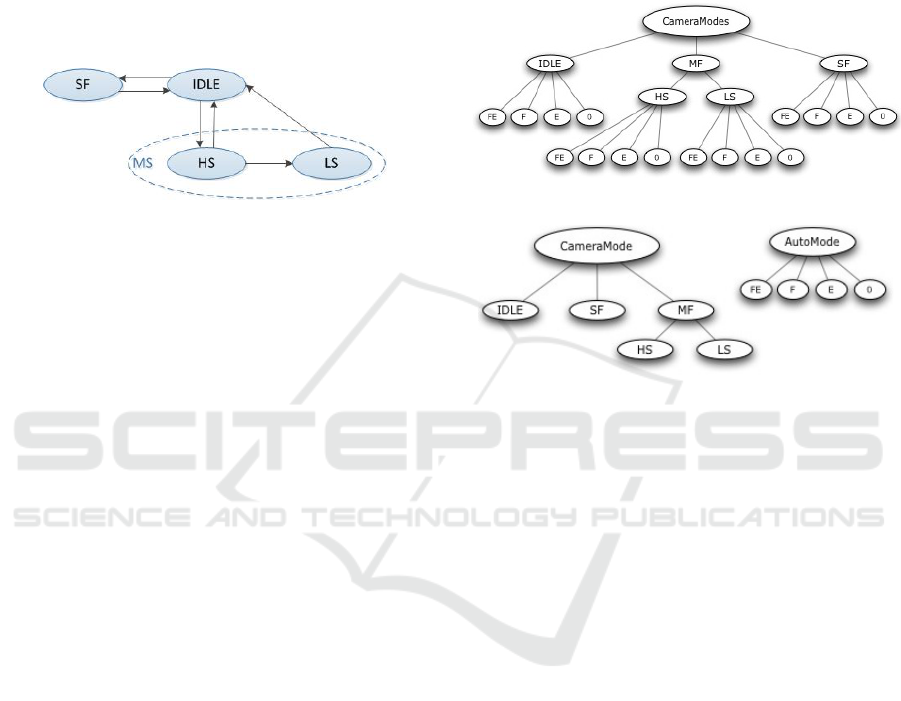
MF contains two sub-modes, high-speed (HS) and
low-speed (LS). MF starts with HS and switches to
LS if/when the image buffer gets full, where shooting
of the consequent frame is delayed until enough space
is freed in the buffer by writing to the flash memory.
With these mode abstractions in mind, from a design
perspective it is expected that refinements to compo-
nents used in these modes may enable new features
(for example smart/continuous save in HS at a perfor-
mance penalty).
Figure 1: Digital Camera: Modes.
Furthermore, in each mode the user can select lens
focusing and exposure metering to be performed au-
tomatically or manually, i.e. each mode has four sub-
modes. More precisely, in the case of multi frame
shooting, each of the MF submodes, HS and LS, has
four further submodes:
• FE: automatic operations are fully enabled: both
autofocus AF and automatic exposure AE are en-
abled;
• F: only the autofocus AF operation is enabled;
• E: only the automatic exposure AE operation is
enabled;
• 0: neither autofocus AF nor automatic exposure
AE are enabled.
In the IDLE mode the user may perform AF, AE or
both, while composing a picture. During this time
DSP cannot be activated and AF and AE operations
are performed on GPP to reduce energy consumption.
When the user presses the shutter release button, first,
AF and AE operations that are being executed are
completed, then the idle mode is terminated and the
system switches to SF or MF depending on the user
selection.
Another way to represent system modes (which
can be related to the same submodes hierarchy as in-
troduced in Figure 2) is to work parallel with on mode
variables, because the choice to activate AF and AE
operations is highly independent of whether the cam-
era is in the IDLE, SFor one of the multi frame modes.
Let call them CameraMode and AutoMode defined
over enumeration types
{IDLE, SF, HS, LS}
and
{FE, F, E, 0}
respectively. We can also see this as a feature compo-
sition/interaction, see e.g., Calder and Magill (2000);
Apel et al. (2010); Broy (2010). Thus, one feature
is responsible for the choice of the current value of
CameraMode and for the processes in the correspond-
ing mode, where the second feature solely deals with
the AF and AE operations.
Figure 2: Digital Camera: Submodes Hierarchy.
Figure 3: Digital Camera: Parallel Model for the Submodes
Hierarchy.
Table 1 lists some of the relevant software com-
ponents, their descriptions and their implementa-
tion platform (GPP/DSP). Some components are im-
plemented in both processors to allow dynamic re-
configuration of the system in order to provide opti-
mal resource usage. Within these constraints, a key
challenge is allocating computing resources for the
software elements to best suit partly predictable us-
age conditions. The DSP is especially suited to im-
age processing operations, yet the DSP has signifi-
cant energy overheads. We characterise the main de-
sign problems for the camera as follows. (i) Given an
overall objective (e.g. minimise time consumption),
satisfy that objective at run time. (ii) Given a usage
profile, minimise energy and time consumption at run
time.
3 PROPOSED VISUALISATION
APPROACH
One of the problems using formal representation is
that often only two factors are considered as impor-
tant: the method must be sound and give such a
representation, which is concise and beautiful from
the mathematical point of view, without taking into
account any question of readability, usability, etc.,
Towards Readability Aspects of Probabilistic Mode Automata
557

Table 1: Software Components.
Description GPP DSP
Operatoions
AF AutoFocus: X X
Automatic lens focusing
AE Automatic Exposure metering X X
IP Image Processing on local - X
buffer, red-eye reduction, etc.
IB Image Buffering: - X
Transfer image
from sensor to local buffer
IS Image Storage: X -
Transfer images
from buffer to flash card
AS Activate Shutter etc. X X
(e.g. aperture adjust)
BC Buffer check: - X
Check if buffer is full
Modes
IDLE Idle mode - X
SF Single-Frame shutter X X
MF Multi-Frame shutter X X
Submodes
FE AF and AE enabled X X
F AF only enabled X X
E AE only enabled X X
0 AF&AE disabled X X
but even small syntactical changes of a method can
make it more understandable and usable for engineers
Constantine (2003); Dhillon (2004); Klare (2000);
Spichkova (2013). Figure 4 presents an the example
of Petri net specifying HS mode details for the digital
camera, which provides a typical representation of a
coloured Petri net. Within our approach, we propose
the following enhancements: To make representation
more readable, first of all we should take into account
the human factor. Thus, if a path (in this case a colour
marked path, green or red) starts on the left/right of
the net, we should proceed to draw it on the same side
if possible and avoid cross moving the paths without
any important reason.
Thus, on Figure 4 two paths are switched after
the operation do AS, which can confuse some readers.
Then, we can try to find a solution to avoid a lot of
crossing arrows having different meanings: the blue
and maroon arrows indicate synchronisation of the
counters, and we can replace them by visual group-
ing of operations on the same counter. As result we
obtain an optimised coloured Petri net presented in
Figure 5, which is semantically equivalent to the rep-
resentation in Figure 4. This optimisation increases
ease of use by human readers (designers, testers etc.)
without decreasing simplicity for machine readability
and semi-automated support or expressiveness/power
(for the domain or domains of choice).
Usability derives from the following aspects:
Figure 4: HS mode details presented as a coloured Petri net.
1 2
1 2
4
7
5
3
8
12
10 11
1 2
do AS
ref AUTO
do IB
do IP
Shoot.eqShoot.lb
Shoot.inc(1) Shoot.inc(1)
BF.inc(1)
BF.inc(1)BF.inc(1)
BF.eq
BF.lb
do IS
Figure 5: HS mode details: Another Visualisation.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
558

• Lowering the barrier between the simplified and
expressive language for the machine support and
that of the domain languages of the user(s) and
associated with the purpose, e.g., by using con-
trolled natural languages that try to avoid disad-
vantages of both natural and formal languages and
being a subset of a natural language with a well-
defined syntax and semantics, see Kuhn (2010);
Fuchs and Schwitter (1995); Macias and Pulman
(1993).
• Applying an appropriate automatisation of a num-
ber of steps within the modelling and verification
process: this not only saves human time and al-
lows to get results much faster then humans can
produce manually, but also (partially) excludes
the human element as the most “unreliable” in
failure, see Redmill and Rajan (1996); Spichkova
and Zamansky (2016). For example, a formal
specification can be generated from the corre-
sponding CASE tool representation which can be
edited in a more readable way also using prede-
fined templates, see Spichkova et al. (2013); Vo
and Spichkova (2016).
• Supporting directly common and standard ab-
stractions that are well-established (and hence
part of the software engineering training), e.g.
Message Sequence Charts Genest and Muscholl
(2008); Harel and Thiagarajan (2003)), or defined
in standards (such as UML, IEC-61131, etc):
• Unification of the representation of any informa-
tion we are dealing with (see, e.g., Spichkova
(2013));
• Easing the use of novel compositional principles
and high-level tools, that are opening novel and
powerful methods to users of formal specification
or specification-based/model-driven methods.
Having a representation like presented on Fig-
ure 5, we can easily transform a Petri net to a hier-
archical MSC. In the case a component-based specifi-
cation of the system is need in addition to the pro-
cess representation, an MSC can be schematically
translated to the corresponding formal specification as
shown in Spichkova et al. (2012); Spichkova (2010).
Let us also shortly discuss translation/representation
of the following modelling artefacts: (global) param-
eters, local, time and counter variables.
Local Variable: use can be translated into state
and transition label expansions for NF purposes Ka-
toen (2005), but can also be intuitively understood in
data types and data structures that capture state. How-
ever for Petri net normal form used in our approach
and compositionality considerations restrictions need
to be designed along with such capabilities to limit the
scopes of these variables appropriately, viz. to FSM
components of nets, in terms of their use in guards and
assignments associated with transitions and states.
Global Parameter: use are of a similar nature with
respect to normalisation but needs to be limited to
achieve compositionally. For example, we could say
the global parameters may occur locally in guards
(i.e., they are read-only) as well as in initialisation
expressions (for the initial states when FSM objects
are created) or with re-assignments limited to higher-
level FSMs (such as mode automata) when submodes
are entered and before these branch out into rational
parallel processes. Another common example is the
use of iterator and bounded loop process constructs
that have a very structured use of local counter vari-
ables which never serve synchronisation but are pro-
viding a reasoning tool for local termination and per-
formance approximation, based on an interplay of lo-
cal (loop) invariants and loop control variables, which
implies strict monotonicity and boundedness.
Time Variables (Clocks): are a further example
and in some sense a special case of counter control
above – in the sense that all practical approaches to
timed automata and synchronous time models discre-
tise an infinite number of real-time points into a real-
time intervals with integer bounds and then solve a
linear convex hull problem to determine feasibility
and/or optimal schedules that meet time constraints.
There is also a significant difference here, that needs
to be considered, relative to counters. In general,
counter processes can be explained as a macro struc-
ture based on sequence and choice, and hence are
lower-level automata (or process expressions) them-
selves, and hence they do not add ’new’ semantics
but can be explained in terms of existing semantics.
For example if we are in rational parallel processes,
they are just a syntactic sugar extension that does not
take us out of this class. Likewise with other classes
of processes (such as pushdown automata). In con-
trast, timed extension are true semantic extensions,
in that they define a different class of behaviours and
automata, because the define what the legitimate pro-
cesses (occurrence nets) are that are traces of the give
language (net system or process expression).
4 RELATED WORK
Component-based software engineering utilises a
well-defined composition theory to enable the pre-
diction of such properties. as performance and re-
liability. This is one of the largest fields of soft-
ware and system engineering, there are many ap-
proaches on component-based design (CBD) cover-
Towards Readability Aspects of Probabilistic Mode Automata
559

ing different aspects and focusing on requirements,
quality, timing properties etc. (see e.g., CBS (2003);
Broy (2010, 1999); Broy et al. (2008)). Several
component-based prediction approaches, e.g. Palla-
dio Kapova et al. (2010); Martens et al. (2008);
Becker et al. (2007), CB-SPE Bertolino and Miran-
dola (2004), ROBOCOP Bondarev et al. (2004) (see
also a survey in Becker et al. (2006)) derive the ben-
efits of reusing well-documented component specifi-
cations. In our approach we focus on the questions of
resource-awareness and adaptivity of systems as well
as on the readability aspects of the formalism.
Mode automata have a long history motivated by
real-time design practices and methods used in in-
dustry in connection with statecharts. Maraninchi et
al. Maraninchi and R
´
emond (2003) capture the no-
tion of modes formally for a practical extension of the
real-time synchronous language Lustre and include
elements of the well-known I/O-automata. Mode au-
tomata define synchronous mode automata as a hy-
brid between data-flow and transition systems. Talpin
et al. Talpin et al. (2006) extend this work to so-
called polychronous mode automata to work with the
multi-clock data-flow formalism SIGNAL. Both these
types of automata are non-deterministic and do not
deal with probabilities. The (bisimulation) equiva-
lence and therefore compositional reasoning for mode
automata is undecidable. However, Maranichi et al.
introduce a synchronised (lock-step) parallel prod-
uct for modes in which shared symbols (intersection
of alphabets nonempty) are synchronised while local
symbols (the symmetric difference of the alphabets)
are independent. While the modes of a single au-
tomaton are mutually exclusive in their approach, and
the behaviour of these mode automata is fully abstract
wrt. probabilistic testing, the automata product suffers
from combinatorial explosion (state space explosion),
due to the aim of allowing arbitrary shared variables
and interference of parallel processes.
Cheung et al. Cheung et al. (2012) describe an
architecture-level method, SHARP, for predicting re-
liability (and timing) of concurrent systems. Whereas
SHARP is specifically designed for reliability and
timing prediction, our method is intended to be
generic thus also catering, e.g., for energy consump-
tion. SHARP models involve scenarios which are ei-
ther basic (similar to message sequence charts) or hi-
erarchical, involving sequential, conditional or con-
current composition. SHARP supports concurrent
composition of finite numbers of instances of a partic-
ular scenario, corresponding to symmetrically repli-
cated components. SHARP derives completion time
and reliability predictions from scenarios for use at
higher levels of abstraction. For each basic sce-
nario, SHARP requires transition rates for all individ-
ual actions, then calculates a single continuous-time
Markov model model from which completion time
and reliability are derived. For an hierarchical sce-
nario a system level CTMC is constructed using ab-
straction techniques such as queuing networks and ab-
straction of sequential components into single global
states. In contrast, our approach requires probabili-
ties/rates at the system level only. Our approach seeks
to avoid or defer calculation of monolithic models.
Our cost estimation is inspired by Valiant’s bulk
synchronous-parallel model Valiant (1990) of paral-
lel computing where global strong synchronisation
conservatively approximates systems which may in
reality use more fine grained synchronisation and
indeed may allow for more asynchrony than the
above approximation would suggest. In performance
benchmarks reported in Yusuf et al. (2011), Yusuf
et al. demonstrated that such conservative predic-
tions may still be accurate enough if there is enough
WCET variation and a large enough number of ac-
tivities/tasks scheduled on individual processing el-
ements. Thus adjacent modes may be assumed to
be strongly separated in the global model while in
fact such modes are partially interleaved with respect
each other (subject to restrictions on repetition such
as boundedness for message sequence graphs as de-
scribed by Alur Alur and Yannakakis (1999) and star-
connectivity in trace languages). For conservative
cost estimation purposes this seems reasonable. We
expect that (with diminishing returns) such models
can be refined selectively, to bound costs of adja-
cent sequences of overlapping modes, in a context-
dependent way.
An interesting approach on integration of syn-
chronous and asynchronous communication was pre-
sented by Hennicker et al. Hennicker et al. (2010);
Hennicker and Knapp (2011). In this approach, I/O-
transition systems were used as the formal back-
ground for modelling of system behaviour. As result,
a refinement relation was defined, which is composi-
tional w.r.t. synchronous and asynchronous connec-
tions of components and which preserves connection-
safety, and next existing interface theories for modal
I/O-transition systems were extended to support as-
semblies, (greybox) assembly refinement and assem-
bly encapsulation, also showing that communication-
safety is preserved by assembly refinement, that
black-box refinement of component interfaces is com-
positional w.r.t. grey-box refinement of assemblies
and, conversely, that assembly encapsulation maps
grey-box to black-box refinement.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
560

5 CONCLUSIONS
In this paper, we proposed a Petri-Nets-based ap-
proach targeting hybrid designer- and operator-
defined performance budgets for timing and energy
consumption. The core focus of this approach is on
decreasing the cognitive load of the designers to de-
crease the chances of design mistakes. To achieve bet-
ter readability, we extended the coloured Petri Nets
formalism. To illustrate the proposed solution, we
presented an example of a sample embedded multi-
media system, a modern digital camera.
Future Work: We are going to integrate the pre-
sented approach with the results of our prior work, a
probabilistic global behaviour analysis approach de-
veloped for reliability and fault-tolerance studies (in-
cluding fault injection) and a parallelism/concurrency
focused framework centred on partially ordered
traces, Petri nets and timing/energy costs.
REFERENCES
(2003). In Cechich, A., Piattini, M., and Vallecillo, A., ed-
itors, Component-Based Software Quality: Methods
and Techniques, volume 2693 of LNCS. Springer.
Adler, R. (1995). Emerging standards for component soft-
ware. IEEE Computer, 28(3):68 –77.
Alur, R. and Yannakakis, M. (1999). Model checking of
message sequence charts. In Baeten, J. C. M. and
Mauw, S., editors, CONCUR’99, volume 1664 of
LNCS, pages 114–129. Springer.
Apel, S., Lengauer, C., M
¨
oller, B., and K
¨
astner, C. (2010).
An algebraic foundation for automatic feature-based
program synthesis. Science of Computer Program-
ming, 75(11):1022 – 1047. Special Section on the Pro-
gramming Languages Track at the 23rd ACM Sympo-
sium on Applied Computing.
Becker, S., Grunske, L., Mirandola, R., and Overhage, S.
(2006). Performance prediction of component-based
systems: A survey from an engineering perspective. In
Architecting Systems with Trustworthy Components,
volume 3938 of LNCS, pages 169–192. Springer.
Becker, S., Koziolek, H., and Reussner, R. (2007). Model-
based performance prediction with the palladio com-
ponent model. In 6th international workshop on Soft-
ware and performance, pages 54–65. ACM.
Bertolino, A. and Mirandola, R. (2004). Cb-spe tool:
Putting component-based performance engineering
into practice. In Crnkovic, I., Stafford, J., Schmidt, H.,
and Wallnau, K., editors, Component-Based Software
Engineering, volume 3054 of LNCS, pages 233–248.
Springer.
Bondarev, E., de With, P., and Chaudron, M. (2004). Pre-
dicting real-time properties of component-based ap-
plications. In In Proc. of the 30the EUROMICRO con-
ference, pages 40–47.
Broy, M. (1999). A logical basis for component-based sys-
tems engineering. In Calculational System Design.
IOS. Press.
Broy, M. (2010). Multifunctional software systems: Struc-
tured modeling and specification of functional re-
quirements. Sci. Comput. Program., 75(12):1193–
1214.
Broy, M., Fox, J., H
¨
olzl, F., Koss, D., Kuhrmann,
M., Meisinger, M., Penzenstadler, B., Rittmann, S.,
Sch
¨
atz, B., Spichkova, M., and Wild, D. (2008).
Service-Oriented Modeling of CoCoME with Focus
and AutoFocus. In The Common Component Model-
ing Example: Comparing Software Component Mod-
els, pages 177–206. Springer.
Calder, M. and Magill, E., editors (2000). Feature Inter-
actions in Telecommunications and Software Systems.
IOS Press.
Cheung, L., andd Leana Golubchik, I. K., and Medvidovic,
N. (2012). Architecture-level reliability prediction of
concurrent systems. In ICPE’12. ACM.
Clements, P. C. (1995). From subroutines to subsystems:
Component-based software development. The Ameri-
can Programmer, 8(11).
Constantine, L. L. (2003). Canonical abstract prototypes for
abstract visual and interaction design. In Jorge, J. A.,
Jardim Nunes, N., and Falc
˜
ao e Cunha, J. a., editors,
Interactive Systems. Design, Specification, and Verifi-
cation, volume 2844 of LNCS, pages 1–15. Springer.
Dhillon, B. S., editor (2004). Engineering Usability: Fun-
damentals, Applications, Human Factors, and Human
Error. American Scientific Publishers.
Fuchs, N. E. and Schwitter, R. (1995). Specifying logic pro-
grams in controlled natural language. In Proceedings
of the Workshop on Computational Logic for Natural
Language Processing, pages 3–5.
Genest, B. and Muscholl, A. (2008). Pattern matching and
membership for hierarchical message sequence charts.
Theory of Computing Systems, 42(4):536–567.
Harel, D. and Thiagarajan, P. S. (2003). Message Sequence
Charts. In Lavagno, L., Martin, G., and Selic, B., ed-
itors, UML for Real: Design of Embedded Real-Time
Systems, pages 77–105. Kluwer Academic Publishers.
Hennicker, R., Janisch, S., and Knapp, A. (2010). Refine-
ment of components in connection-safe assemblies
with synchronous and asynchronous communication.
In Foundations of Computer Software: future Trends
and Techniques for Development, Monterey’08, pages
154–180. Springer.
Hennicker, R. and Knapp, A. (2011). Modal interface the-
ories for communication-safe component assemblies.
In 8th international conference on Theoretical aspects
of computing, ICTAC’11, pages 135–153. Springer.
Henzinger, T. A. and Sifakis, J. (2006). The embedded sys-
tems design challenge. In FM, pages 1–15.
Kapova, L., Buhnova, B., Martens, A., Happe, J., and
Reussner, R. (2010). State dependence in perfor-
mance evaluation of component-based software sys-
tems. In International conference on Performance en-
gineering, WOSP/SIPEW ’10, pages 37–48. ACM.
Katoen, J.-P. (2005). Labelled transition systems. In
Broy, M., Jonsson, B., Katoen, J.-P., Leucker, M., and
Towards Readability Aspects of Probabilistic Mode Automata
561

Pretschner, A., editors, Model-Based Testing of Reac-
tive Systems, volume 3472 of Lecture Notes in Com-
puter Science, pages 615–616. Springer.
Klare, G. R. (2000). Readable computer documentation.
ACM J. Comput. Doc., 24(3):148–168.
Kuhn, T. (2010). Controlled English for Knowledge Rep-
resentation. PhD thesis, Faculty of Economics, Busi-
ness Administration and Information Technology of
the University of Zurich.
Lee, B. (2006). Optimizing heterogeneous architectures.
EDN.
Macias, B. and Pulman, S. G. (1993). Natural Language
Processing for Requirements Specification, pages 67–
89. Chapman and Hall Ltd., London.
Maraninchi, F. and R
´
emond, Y. (2003). Mode-automata:
a new domain-specific construct for the development
of safe critical systems. Sci. Comput. Program.,
46(3):219–254.
Martens, A., Becker, S., Koziolek, H., and Reussner, R.
(2008). An empirical investigation of the effort of
creating reusable, component-based models for per-
formance prediction. In Component-Based Software
Engineering, pages 16–31. Springer.
Mudge, T. N. (2001). Power: A first-class architectural de-
sign constraint. IEEE Computer, 34(4):52–58.
Peake, I. D. and Schmidt, H. W. (2011). Systematic
simplicity-accuracy tradeoffs in parameterised con-
tract models. In Seventh International ACM Sigsoft
Conference on the Quality of Software Architectures
(QoSA), Boulder, Colorado, USA.
Rao, R., Vrudhula, S., and Rakhmatov, D. (2003). Battery
modeling for energy aware system design. IEEE Com-
puter, 36(12):77 – 87.
Redmill, F. and Rajan, J. (1996). Human Factors in Safety-
Critical Systems. Butterworth-Heinemann.
Sangiovanni-Vincentelli, A. L. and Martin, G. (2001).
Platform-based design and software design method-
ology for embedded systems. IEEE Design & Test of
Computers, 18(6):23–33.
Saxe, E. (2010). Power-efficient software. Communications
of the ACM, 53(2).
Schmidt, H. W. (2003). Trustworthy components - com-
positionality and prediction. Journal of Systems and
Software, 65(3):215–225.
Schmidt, H. W., Peake, I. D., Xie, J., Thomas, I. E., Kr
¨
amer,
B. J., Fay, A., and Bort, P. (2003). Modelling Pre-
dictable Component-Based Distributed Control Ar-
chitectures. In Object-Oriented Real-Time Depend-
able Systems, pages 339–346.
Spichkova, M. (2010). From Semiformal Requirements To
Formal Specifications via MSCs. Technical Report
TUM-I1019, TU M
¨
unchen.
Spichkova, M. (2013). Design of formal languages and in-
terfaces: “formal” does not mean “unreadable”. In
Blashki, K. and Isaias, P., editors, Emerging Research
and Trends in Interactivity and the Human-Computer
Interface. IGI Global.
Spichkova, M., H
¨
olzl, F., and Trachtenherz, D. (2012).
Verified system development with the autofocus tool
chain. Workshop on Formal Methods in the Develop-
ment of Software, (WS-FMDS).
Spichkova, M. and Zamansky, A. (2016). A human-centred
framework for combinatorial test design. In 11th In-
ternational Conference on Evaluation of Novel Ap-
proaches to Software Engineering (ENASE), pages
228–233. SciTePress.
Spichkova, M., Zhu, X., and Mou, D. (2013). Do we really
need to write documentation for a system? In Interna-
tional Conference on Model-Driven Engineering and
Software Development (MODELSWARD’13).
Talpin, J.-P., Brunette, C., Gautier, T., and Gamati
´
e, A.
(2006). Polychronous mode automata. In Proceed-
ings of the 6th ACM & IEEE International conference
on Embedded software, EMSOFT ’06, pages 83–92,
New York, NY, USA. ACM.
Valiant, L. G. (1990). A Bridging Model for Parallel Com-
putation. Communications of the ACM, 33(8).
Vo, P. T. N. and Spichkova, M. (2016). Model-based gener-
ation of natural language specifications. In Federation
of International Conferences on Software Technolo-
gies: Applications and Foundations, pages 221–231.
Springer.
Wolf, W., Jerraya, A. A., and Martin, G. (2008). Multi-
processor system-on-chip (MPSoc) technology. IEEE
Transactions on Computer-Aided Design of Integrated
Circuits and Systems, 27(10).
Yusuf, I. I., Schmidt, H. W., and Peake, I. D. (2011).
Architecture-based fault tolerance support for grid
applications. In Quality of Software Architectures,
QoSA’11, pages 177–181. ACM.
Zamansky, A., Spichkova, M., Rodriguez-Navas, G., Her-
rmann, P., and Blech, J. O. (2018). Towards classifi-
cation of lightweight formal methods. In 13th Interna-
tional Conference on Evaluation of Novel Approaches
to Software Engineering (ENASE), pages 305–313.
SciTePress.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
562
