
Fault Training Matrix for Process Monitoring based on Structured
Residuals
Khaoula Tidriri, Nizar Chatti, Sylvain Verron and Teodor Tiplica
62 Avenue Notre Dame Du Lac, 49000 Angers, France
Keywords: Process Monitoring, Model-based Fault Diagnosis, Analytical Redundancy, Complex Systems.
Abstract:
Fault Detection and Diagnosis (FDD) approaches have become increasingly important due to the growing
demand for reliability and safety for modern systems. During the last decades, many works were reported
about FDD approaches, especially model-based ones. The latter relies solely on a developed model that
accurately describes the system, without exploiting any additional available data.
In this work, we intent to make use of the physical model as well as historical data, for both normal operating
state and faulty states. Hence, the paper focuses on the validation of an experimental approach, called Fault
Training Analysis, that analyzes and identifies the causal relations between residuals and faults identified and
observed on the system, by dealing with real measurement data from nominal and faulty states. It results on
an experimental matrix, called Fault Training Matrix, that enhances the theoretical Fault Signature Matrix.
The effectiveness of the proposed approach is validated through the challenging Tennessee Eastman Process.
The application results on a high fault detection rate, a high fault diagnosis rate and a small false alarm rate.
1 INTRODUCTION
To improve systems reliability and ensure a safety
production for humans and materials, Fault Detection
and Diagnosis (FDD) methods become increasingly
important for many technical plants. They are de-
ployed to avoid catastrophic consequences caused by
undetected abnormalities and faults.
FDD includes two mains tasks: detection which
aims to identify the presence of an eventual fault in
the system, and isolation which aims to determine the
root causes of the detected fault. Among FDD ap-
proaches, one can distinguish between model-based
and data-driven categories. Detailed and comprehen-
sive surveys of these latter are given in (Tidriri et al.,
2016), (Gao et al., 2015).
Different approaches using mathematical models
have been developed in the last years (Liu et al.,
2016), (Sidhu et al., 2015), (Tidriri et al., 2018),
(Chatti et al., 2016), (Jha et al., 2017). They usu-
ally rely on the concept of analytical redundancy to
address the fault detection and isolation steps. The
basic idea of analytical redundancy consists of com-
paring the system’s actual behavior, provided by real
measurements, and the predicted model developed for
the system in a normal operating state. Analytical re-
dundancy relations (ARRs) can be generated by using
observers, parity space, parameter estimation, graph-
ical approaches, etc (Yang et al., 2015), (Zhong et al.,
2015), (Chatti et al., 2014), (Tidriri et al., 2018). The
first step consists of the numerical evaluation of the
ARRs at every time instant, that generates a set of
residuals. Then, these residuals are compared against
fixed or adaptive thresholds, computed by using data
from normal operating conditions. If there is an in-
consistency, the residuals signature vector enables the
fault isolation.
However, it is worth noting that the classical ap-
proach uses only normal operating data to compute
the thresholds, and does not exploit any available
faulty data. Nevertheless, modern systems are in-
creasingly automated, allowing the access to a large
amount of nominal and faulty data. Therefore, it
seems natural to monitor the system using physical
models and complete available historical data.
In this work, we intent to make use of all system
available information and hence exploit the physical
model as well as historical data, whether it belongs to
the normal operating state or the faulty states. This is
done through an experimental approach, called Fault
Training Analysis (FTrA). This latter identifies the
causal relations between residuals and faults that al-
ready occurred in the system, by dealing with real
measurement data. It results on an experimental FSM
Tidriri, K., Chatti, N., Verron, S. and Tiplica, T.
Fault Training Matrix for Process Monitoring based on Structured Residuals.
DOI: 10.5220/0007795600230030
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 23-30
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
23
(Fault Signature Matrix) that enhances the theoretical
one. This proposed matrix is called FTrM.
Accordingly, the paper is structured as follows.
Section 2 will overview the classical model-based
fault detection and diagnosis methodology, and point
out the main limits and challenges that remain to be
addressed. Section 3 will describe the proposed Fault
Training Analysis and detail the construction of the
associated Fault Training Matrix. In section 4, the ap-
plication on the well-known Tennessee Eastman Pro-
cess will show the effectiveness of the proposed ap-
proach. Finally, the last section will conclude the pa-
per.
2 MODEL-BASED FAULT
DETECTION AND DIAGNOSIS
In this section, the model-based FDD scheme is pre-
sented. The limits as well as the challenges are de-
tailed.
2.1 Model-based FDD Scheme
Model-based FDD requires the development of an ex-
plicit mathematical model that describes the global
behavior of the monitored system (Isermann, 2005),
(Ding, 2008), (Tidriri et al., 2016). The model is
usually developed based on some fundamental under-
standing of process physical phenomena. In quan-
titative models, this understanding is expressed in
terms of mathematical functional relationships be-
tween the inputs and outputs of the system. Examples
of model-based approaches are parity relations, ob-
servers, Bond Graphs, etc. (Yang et al., 2015), (Zhong
et al., 2015), (Chatti et al., 2014), (Tidriri et al., 2018).
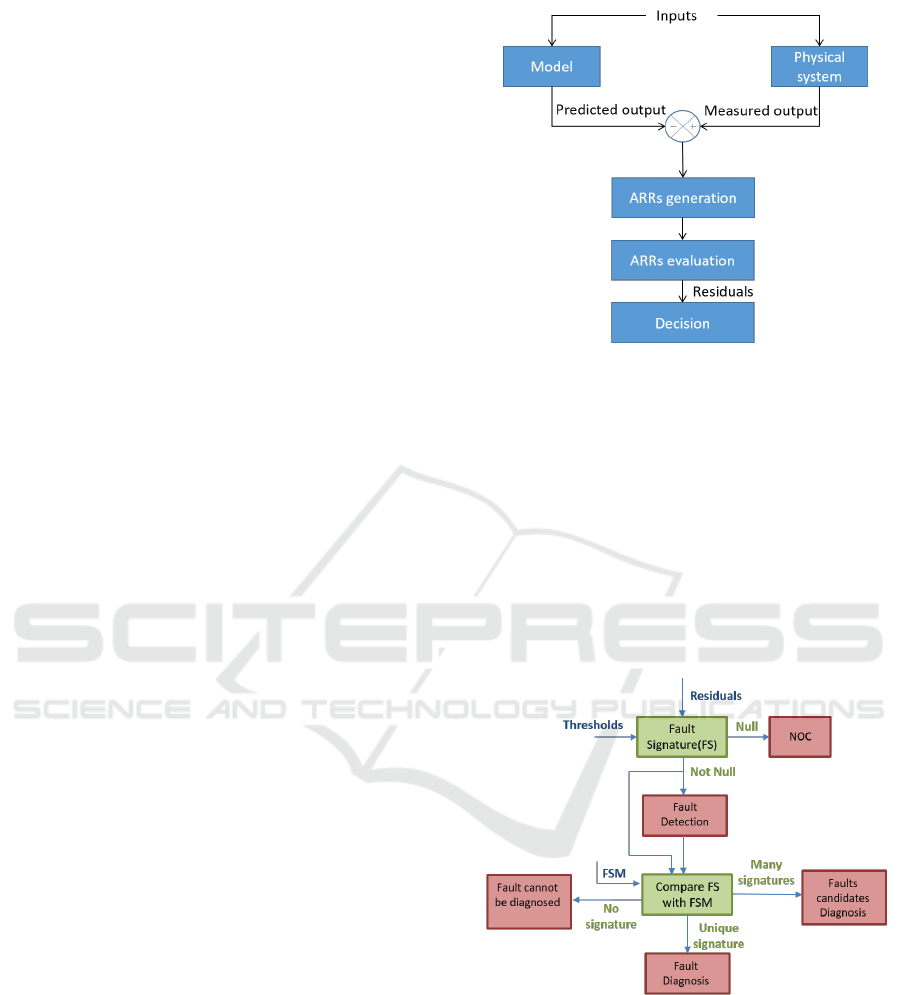
As represented in Figure 1, the first step of a
model-based FDD procedure consists of comparing
the system’s available measurements (measured out-
put) with a priori information represented by the sys-
tem’s mathematical model (predicted output). This is
known as Analytical Redundancy Relations (ARRs)
generation. These ARRs are specific constraints rep-
resented as algebraic differential equations that con-
tain only known variables (measured outputs, system
parameters and inputs). The numerical evaluation of
the ARRs at every time instant produces a set of resid-
uals r
k
, expressed as follows:
r
k
= Θ(y
k
, u
k
, ρ) (1)
where k is the time instance, y
k
are the measured
outputs, u
k
the input signals, ρ the system parameters
Figure 1: Principle of model-based FDD.
and Θ is a function deduced from the residual gen-
erator method chosen for the FDD (observer, parity
relations, etc.)
In order to take a decision about the system being
in a normal or in a faulty state, the set of residuals
are compared, at each time instance k, against fixed
or adaptive threshold (See Figure 2). These latter are
determined using different methods. One can cite sta-
tistical monitoring schemes (such as traditional She-
whart control charts (Areepong, 2013)), or set-based
methods that consider the noise effect and model un-
certainty (Chatti et al., 2016).
Figure 2: Model-based FDD decision.
The residuals comparison against thresholds pro-
duces a set of fault signatures (FS):
FS(k) = [FS
1
(k), FS
1
(k), ..., FS
n
(k)] where:
FS
i
(k) =
1 if r
i
overcomes the associated thresholds
0 otherwise
Accordingly, if the FS is null, the system is in
Normal Operating Conditions (NOC). Otherwise, an
undesired behavior is occurring in the system.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
24

The fault isolation is then performed by compar-
ing the FS with a specific binary matrix called the
Fault Signature Matrix (FSM), which links theoreti-
cally the residuals sensitivity to the potential faults.
The columns of this matrix represent the set of resid-
uals while its rows are related to the faults. The matrix
elements are determined as follows:
S
i j
=
1 if residual i is sensitive to fault j
0 otherwise
Hence, when a FS is unique, the fault can be de-
tected and isolated. Otherwise, the obtained FS can
lead to an insufficient result, i.e. the fault can be only
detected.
2.2 Limits and Challenges
The overview on the model-based diagnosis method-
ology highlights a number of challenges that may be
tackled:
• In order to determine the faults that can be de-
tected and isolated by the model-based method,
a theoretical FSM should be built. The classical
way for building a FSM considers that all the el-
ements appearing in the residual’s expression are
associated with faults. Hence, the set of faults that
can be detected and isolated is defined solely by
the constitutive elements of the generated residu-
als. This represents a clear limitation since a fault
that cannot be expressed in the residual expres-
sion cannot be detected and isolated. Therefore,
unidentified faults whose origin remains undeter-
mined are not tackled by classical model-based
approaches.
• The theoretical FSM links the residuals to the po-
tential faults. These faults must have a physical
meaning representing either faults that are associ-
ated with components involved in the modeling of
the system, or faults on physical phenomena oc-
curring in the process. This reduces the scope of
model-based approaches, since the origin of faults
can be be explained by other phenomena such as
correlations for example.
• Finally, the classical FSM is completely con-
structed in a theoretical way and does not exploit
the historical faulty data that can be available.
Only Normal operating data is used to validate
the proposed model, and to compute the thresh-
old values.
The purpose of this work is to perform a deeper
and an experimental faults-to-residuals correlation
study through the exploitation of a physical model as
well as historical data, whether it belongs to the nor-
mal operating state or the faulty states. Indeed, mod-
ern systems are increasingly automated and hence,
they allow the access to a significant amount of data.
Therefore, an experimental approach, called Fault
Training Analysis (FTrA), is presented in the follow-
ing. It can determine the causal relations between
residuals and faults that already occurred in the sys-
tem, by dealing with real measurement data, leading
to the construction of an experimental FSM that can
enhance the theoretical one. Therefore, many chal-
lenges aforementioned are raised.
3 FAULT TRAINING ANALYSIS
In this section, the FTrA is detailed and the construc-
tion of the FTrM is addressed.
3.1 Fault Training Analysis
First, we assume the following hypothesis:
Hypothesis 1. A model can be developed for the sys-
tem to be monitored.
From this available model that describes the sys-
tem’s behavior, a set of residuals r = [r
1
, r
2
, ..., r
m
],
generated by applying a model-based FDD approach,
is defined.
Second, the following hypothesis are admitted:
Hypothesis 2. All sensors are faults free.
Hypothesis 3. Training data sets are available.
Hence, a set of classes C = {NOC, D
1
, ..., D
n
}
that represent all the system’s states is introduced,
where NOC is the normal operating conditions and
D = {D
1
, ..., D
n
} is a set of faults that may occur in
the system. These faults are identified in the training
data sets and can affect the actuators as well as the
sensors or the plant.
The idea behind the FTrA is to determine the
potential links between the residuals generated on
the basis of a model and the faults training data sets
available on the system. This can be done through a
FTrM, constructed during the training phase.
Definition 1. A Fault Training Matrix is an exper-
imental FSM that evaluates each generated residual
with the available faulty training data sets in order to
Fault Training Matrix for Process Monitoring based on Structured Residuals
25
link residuals to potential faults, with specific thresh-
olds for each of them. The columns of this matrix rep-
resent the set of residuals while its rows are related to
the faults identified in the training data sets.
3.2 Fault Training Matrix
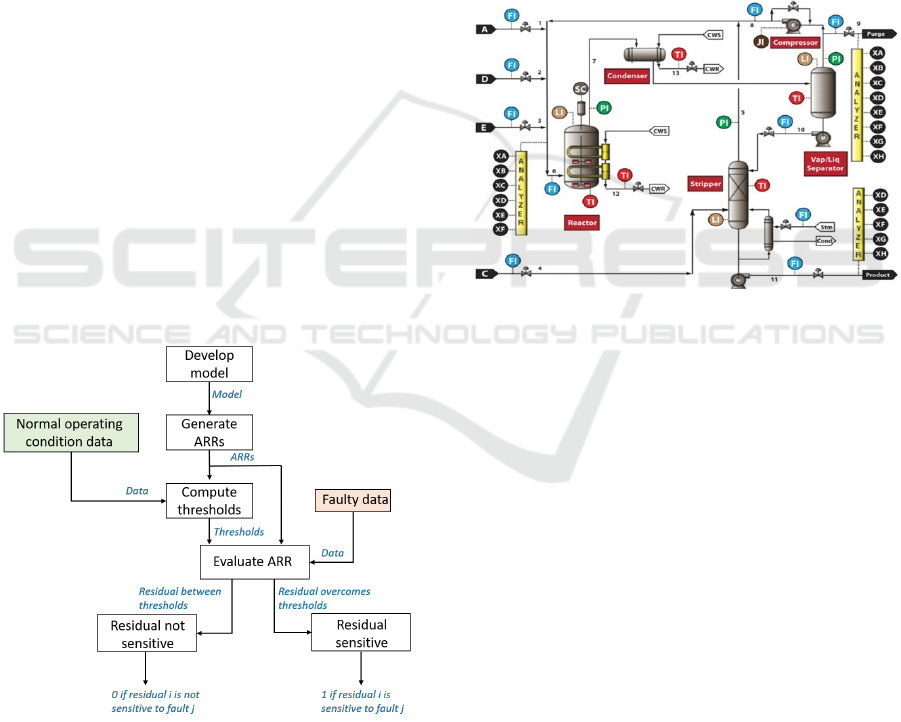
The FTrM construction procedure is given in Figure
3 and detailed as follows:
1. Develop the physical/graphical model describing
the system behavior.
2. Generate ARRs.
3. Compute thresholds for each ARR, using histor-
ical data from normal operating conditions. This
step can be addressed by various approaches as
aforementioned.
4. For each fault scenario, use the faulty observa-
tions (data) to numerically evaluate each ARR:
• if the residual overcomes its associated thresh-
olds then it is assumed that the residual is sen-
sitive to the considered fault scenario.
• if the residual remains between its associated
thresholds then it is assumed that the residual is
not sensitive to the considered fault scenario.
5. Determine the FTrM elements as follows:
T
i j
=
1 if residual i is sensitive to fault j
0 otherwise
Figure 3: FTrM construction principle.
The FTrM is then used on-line to detect and iso-
late faults that may occur in the system, following the
same reasoning in Figure 2.
4 APPLICATION
In this section, the classical model-based FDD ap-
proach as well as the proposed Fault Training Analy-
sis are applied on the well-known Tennessee Eastman
Process. A critical discussion and a comparison are
given.
4.1 The TEP
The Tennessee Eastman Process (TEP) is a realistic
industrial benchmark that consists of five units: a re-
actor, a condenser, a compressor, a separator and a
stripper (Downs and Vogel, 1993). The process flow
sheet of the TEP is presented in Figure 4.
Figure 4: Process flow sheet of the TEP.
The reactants A, D, E, C (corresponding respec-
tively to Streams 1; 2;3;4) are introduced into the re-
actor to form the liquid products G, H and a byproduct
F.
It is worth noting that 41 process measurements
are available, as well as 12 input variables. More de-
tails are given in (Downs and Vogel, 1993).
Many researchers and practitioners evaluated and
compared their monitoring approaches on the TEP
(Verron et al., 2010), (Atoui et al., 2016), (Ghosh
et al., 2011), (Ding et al., 2009), (Yin et al., 2012)
since this benchmark can simulate different faults, de-
tailed in Table 1. Indeed, training and test data sets
are generated from the TEP by recording the process
measurements under NOC and the aforementioned
faults.
4.2 Classical Model-based FDD
In this section, a classical model-based approach is
applied for the FDD of the TEP. This approach relies
on a BG model that has been previously developed
by the authors in (Tidriri et al., 2018).
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
26
Table 1: Process faults.
Fault Description Type
D
1
A/C feed ratio, B composition constant (Stream 4) step
D
2
B composition, A/C ratio constant (Stream 4) step
D
3
Condenser cooling water inlet temperature step
D
4
A feed loss (Stream 1) step
D
5
C header pressure loss-reduced availability (Stream 4) step
D
6
A, B, and C feed composition (Stream 4) random
D
7
Condenser cooling water inlet temperature random
D
8
Reaction kinetics drift
The BG model of a part of the TEP (the reactant
A) is given as an example in Figure 5.
The BG model of the TEP is then used to gener-
ate residuals. This is done by adopting the strategy
of eliminating unknown variable by substituting them
using only measured and known ones. Details about
this procedure can be found in (Chatti et al., 2014),
(Tidriri et al., 2018).
18 residuals were generated for the TEP. For the
sake of clarity, only 4 residuals expressions, in the
steady state, are given in the following:
r
1
= y
A1
F
1
+ y
A5
F
5
+ y
A8
F
8
−C
m
dµ
Am
dt
−
µ
Am
R
m
− y
A6
F
6
(2)
r
2
= y
A6
F
6
−C
r
dµ
Ar
dt
−
µ
Ar
R
r
+
3
∑
j=1
ν
A j
τ
j
−C
s
dµ
As
dt
− y
A8
(F
8
+ F
9
) − x
A10
F
10
(3)
r
3
= y
B1
F
1
+ y
B5
F
5
+ y
B8
F
8
+ y
B2
F
2
−C
m
dµ
Bm
dt
−
µ
Bm
R
m
− y
B6
F
6
(4)
r
4
= y
B6
F
6
−C
r
dµ
Br
dt
−
µ
Br
R
r
+
3
∑
j=1
ν
b j
τ
j
−C
s
dµ
Bs
dt
− y
B8
(F
8
+ F
9
) − x
B10
F
10
= 0 (5)
The classical model-based approach relies on the
fact that residuals expression define the set of de-
tectable and isolable faults. Therefore, according to
the expression of residuals r
1
and r
2
related to gas A
for example, the detectable faults involve the chemi-
cal potentials (µ
Am
, µ
Ar
), the sensors which measure
several flows (A feed flow F
1
, overhead flow from
the stripper F
5
, recycled flow F
8
, reactor feed rate F
6
,
purge rate F
9
, the product separator underflow F
10
, the
reaction kinetics through the reaction rate τ
j
, the fric-
tions in the mixing and the reactor zone (R
m
, R
r
) and
the potential energy stored in the mixing, reactor and
separator zones (C
m
, C
r
, C
s
).
In order to exploit the available historical data, the
FTrA is performed in the following.
4.3 Fault Training Analysis of the TEP
In this step, known variables of the TEP are used in
normal operating conditions (NOC) and faulty states,
in order to determine which residuals react in pres-
ence of different faults. Hence, all obtained residu-
als are evaluated with available measured outputs and
control inputs.
For example, residual r
1
was evaluated us-
ing known variables that appear in its expres-
sion, namely (F
1
, F
5
, F
8
, F
6
) for each faulty scenario
(D
1
, D
2
, ..., D
8
). If the residual is sensitive to a faulty
scenario, its column value in the FTrM will be equal
to 1. It appeared that residual r
1
reacts and exceeds
its fixed thresholds in presence of measurements from
6 faulty scenarios: (D
1
, D
4
, D
5
, D
6
, D
7
, D
8
). Hence,
these faults have an impact on the measured outputs
and control inputs within sensors free-fault case. Ac-
cordingly, a 1 is added in the FTrM, for each corre-
sponding fault, as shown in Table 2.
The same reasoning is applied for the remaining
residuals.
During this testing campaign, we noted that 3
residuals (r
12
, r
16
, r
18
) did not react to any faulty sce-
nario. Therefore, they are not considered in the FTrM.
Furthermore, it appears that it is possible to isolate
all faults affecting the TEP using a subset of residuals.
Hence, a mutual information based algorithm (Verron
et al., 2008) is applied to obtain a reduced subset of 5
residuals with unique FS (r
6
, r
3
, r
4
, r
1
, r
11
).
The Fault Signature (FS) is then represented by the
following vector of 5 residuals (r
6
, r
3
, r
4
, r
1
, r
11
).
The deduced reduced FTrM (Table 3) is used in
the on-line monitoring strategy of the TEP, as de-
scribed previously in Figure 2.
Fault Training Matrix for Process Monitoring based on Structured Residuals
27
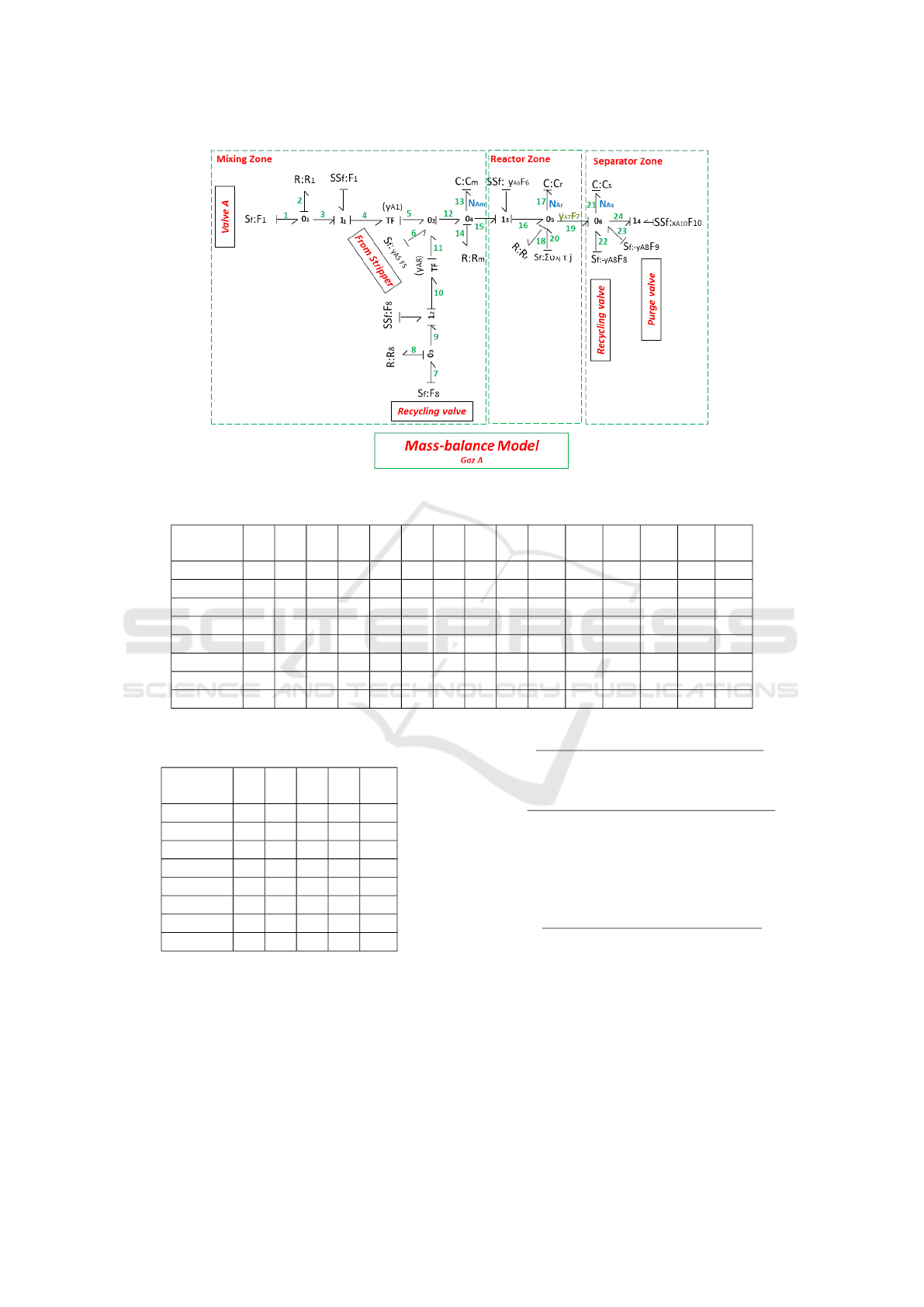
Figure 5: Mass-balance BG of reactant A in the TEP, with derivative causality.
Table 2: Fault Training Matrix (FTrM) linking faults to residuals.
H
H
H
H
H
r
1
r
2
r
3
r
4
r
5
r
6
r
7
r
8
r
9
r
10
r
11
r
13
r
14
r
16
r
17
D
1
1 0 1 0 0 0 0 0 0 0 0 0 0 0 0
D
2
0 1 0 1 0 1 0 1 1 0 1 1 1 1 1
D
3
0 0 1 0 0 0 0 0 1 0 1 0 0 0 0
D
4
1 0 0 0 0 0 0 0 1 0 1 0 0 0 0
D
5
1 1 1 0 1 1 0 1 1 1 1 0 0 0 0
D
6
1 0 1 0 0 0 0 0 1 0 1 0 0 0 0
D
7
1 1 0 0 1 1 0 1 1 0 1 0 0 0 0
D
8
1 1 1 1 1 1 1 1 1 0 1 0 0 0 0
Table 3: Reduced Fault Training Matrix (FTrM) linking
faults to residuals.
H
H
H
H
H
r
1
r
3
r
4
r
6
r
11
D
1
1 1 0 0 0
D
2
0 0 1 1 1
D
3
0 1 0 0 1
D
4
1 0 0 0 1
D
5
1 1 0 1 1
D
6
1 1 0 0 1
D
7
1 0 0 1 1
D
8
1 1 1 1 1
4.4 Results and Comparison
Detection performances are evaluated using the false
alarm rate (FAR), which is the percentage of normal
samples identified as fault (See (6)), and fault detec-
tion rate (FdR), which is the percentage of samples
correctly detected (See (7)).
FAR =
No. of normal samples identified as fault
Total No. of normal samples
∗ 100
(6)
FdR =
No. of faulty samples correctly detected
Total No. of faulty samples
∗100
(7)
As for diagnosis performances, they are evaluated
using the fault diagnosis rate (FDR):
FDR =
No. of samples correctly diagnosed
Total No. of samples
∗ 100
(8)
The results are given in Tables 4 and 5. A com-
parison between many works reported in the litera-
ture (Fisher Discriminant Analysis (FDA) (Yin et al.,
2012), Principal Component Analysis (PCA) (Yin
et al., 2012), (Ghosh et al., 2014), Partial Least
Squares (PLS) (Yin et al., 2012), Dynamic PCA
(DPCA) (Yin et al., 2012), Bayesian Network (BN)
(Verron, 2007), Independant Component Analysis
(ICA) (Yin et al., 2012), Simple Neural Network
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
28
Table 4: Comparison of fault detection performance (%) for the TEP, with reduced FTrM.
FDA PCA PLS PCA DPCA BN ICA BG
Average FdR 79.13 90.60 90.82 90.86 92.39 98.92 98.95 99.94
FAR 3.11 6.13 10 1.56 10.13 1.13 2.75 0.38
Table 5: Comparison of fault diagnosis performance (%) for the TEP, with reduced FTrM.
SNN SVM PCA NN BN BG
Average FDR 60.63 62.77 74.82 79.13 95.78 88.66
(SNN) (Eslamloueyan, 2011), Support Vector Ma-
chine (SVM) (Jing and Hou, 2015), PCA (Jing and
Hou, 2015), NN (Eslamloueyan, 2011), BN (Verron,
2007)), based solely on data, and the proposed en-
hanced BG approach is addressed.
The absence of model-based approaches within this
comparison is due to the fact that no work has at-
tempted to detect and diagnose the faults affecting the
TEP by using a model. The red color indicates the
best result.
According to Table 4, it appears that the pro-
posed BG approach presents the best detection per-
formances. Indeed, it has the highest FdR (99.94%).
6 faults are perfectly detected (D
1
, D
2
, D
4
, D
5
, D
7
, D
8
)
in 100% of the observations. Furthermore, the BG ap-
proach shows the lowest FAR (0.38%).
Thus, the proposed BG approach shows the best FAR
and FdR.
Regarding the diagnosis performances, the pro-
posed BG approach shows the second best perfor-
mance, with an average FDR of 88.66%, as indicated
in Table 4.
Accordingly, the BG approach, enhanced with the
FTrA, presents better or comparable performances
than many data-driven methods reported in the litera-
ture.
5 CONCLUSION
In this work, an enhanced model-based approach was
proposed for fault detection and diagnosis of a well-
known industrial benchmark: the Tennessee Eastman
process.
The proposed approach improves the classical
fault detection and diagnosis model-based scheme by
extending it to an experimental approach, i.e. the
Fault Training Analysis, that exploits the available
historical data from nominal as well as faulty states.
The purpose of this latter is to identify the causal re-
lationships between residuals and faults. The fault
training analysis results on an experimental matrix,
called Fault Training Matrix, that enhances the theo-
retical Fault Signature Matrix.
The proposed approach was validated through the
Tennessee Eastman Process, and shows a high fault
detection rate, a high fault diagnosis rate and a small
false alarm rate.
REFERENCES
Areepong, Y. (2013). A comparison of performance of
residual control charts for trend stationary processes.
International Journal of Pure and Applied Mathemat-
ics, 85(3):583–592.
Atoui, M. A., Verron, S., and Kobi, A. (2016). A bayesian
network dealing with measurements and residuals for
system monitoring. Transactions of the Institute of
Measurement and Control, 38(4):373–384.
Chatti, N., Guyonneau, R., Hardouin, L., Verron, S.,
and Lagrange, S. (2016). Model-based approach
for fault diagnosis using set-membership formula-
tion. Engineering Applications of Artificial Intelli-
gence, 55:307–319.
Chatti, N., Ould-Bouamama, B., Gehin, A.-L., and Mer-
zouki, R. (2014). Signed bond graph for multiple
faults diagnosis. Engineering Applications of Artifi-
cial Intelligence, 36:134–147.
Ding, S. (2008). Model-based fault diagnosis techniques:
design schemes, algorithms, and tools. Springer Sci-
ence & Business Media.
Ding, S. X., Zhang, P., Naik, A., Ding, E. L., and Huang,
B. (2009). Subspace method aided data-driven design
of fault detection and isolation systems. Journal of
process control, 19(9):1496–1510.
Downs, J. J. and Vogel, E. F. (1993). A plant-wide indus-
trial process control problem. Computers & chemical
engineering, 17(3):245–255.
Eslamloueyan, R. (2011). Designing a hierarchical neural
network based on fuzzy clustering for fault diagnosis
of the tennessee–eastman process. Applied soft com-
puting, 11(1):1407–1415.
Gao, Z., Cecati, C., and Ding, S. X. (2015). A survey
of fault diagnosis and fault-tolerant techniques—part
i: Fault diagnosis with model-based and signal-based
approaches. IEEE Transactions on Industrial Elec-
tronics, 62(6):3757–3767.
Ghosh, K., Ng, Y. S., and Srinivasan, R. (2011). Evaluation
of decision fusion strategies for effective collaboration
among heterogeneous fault diagnostic methods. Com-
puters & chemical engineering, 35(2):342–355.
Fault Training Matrix for Process Monitoring based on Structured Residuals
29

Ghosh, K., Ramteke, M., and Srinivasan, R. (2014). Op-
timal variable selection for effective statistical pro-
cess monitoring. Computers & Chemical Engineer-
ing, 60:260–276.
Isermann, R. (2005). Model-based fault-detection and di-
agnosis–status and applications. Annual Reviews in
control, 29(1):71–85.
Jha, M. S., Chatti, N., and Declerck, P. (2017). Robust
fault detection in bond graph framework using interval
analysis and fourier-motzkin elimination technique.
Mechanical Systems and Signal Processing, 93:494–
514.
Jing, C. and Hou, J. (2015). Svm and pca based fault clas-
sification approaches for complicated industrial pro-
cess. Neurocomputing, 167:636–642.
Liu, J., Luo, W., Yang, X., and Wu, L. (2016). Robust
model-based fault diagnosis for pem fuel cell air-feed
system. IEEE Transactions on Industrial Electronics,
63(5):3261–3270.
Sidhu, A., Izadian, A., and Anwar, S. (2015). Adaptive
nonlinear model-based fault diagnosis of li-ion bat-
teries. IEEE Transactions on Industrial Electronics,
62(2):1002–1011.
Tidriri, K., Chatti, N., Verron, S., and Tiplica, T. (2016).
Bridging data-driven and model-based approaches for
process fault diagnosis and health monitoring: A re-
view of researches and future challenges. Annual Re-
views in Control.
Tidriri, K., Chatti, N., Verron, S., and Tiplica, T. (2018).
Model-based fault detection and diagnosis of complex
chemical processes: A case study of the tennessee
eastman process. Proceedings of the Institution of
Mechanical Engineers, Part I: Journal of Systems and
Control Engineering, page 0959651818764510.
Verron, S. (2007). Diagnostic et surveillance des processus
complexes par r
´
eseaux bay
´
esiens. PhD thesis, Univer-
sit
´
e d’Angers.
Verron, S., Li, J., and Tiplica, T. (2010). Fault detec-
tion and isolation of faults in a multivariate process
with bayesian network. Journal of Process Control,
20(8):902–911.
Verron, S., Tiplica, T., and Kobi, A. (2008). Fault detection
and identification with a new feature selection based
on mutual information. Journal of Process Control,
18(5):479–490.
Yang, Y., Ding, S. X., and Li, L. (2015). On observer-based
fault detection for nonlinear systems. Systems & Con-
trol Letters, 82:18–25.
Yin, S., Ding, S. X., Haghani, A., Hao, H., and Zhang,
P. (2012). A comparison study of basic data-driven
fault diagnosis and process monitoring methods on
the benchmark tennessee eastman process. Journal
of Process Control, 22(9):1567–1581.
Zhong, M., Song, Y., and Ding, S. X. (2015). Parity space-
based fault detection for linear discrete time-varying
systems with unknown input. Automatica, 59:120–
126.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
30
