
Optimal Path Planning with Clothoid Curves for Passenger Comfort
Edward Derek Lambert
a
, Richard Romano
b
and David Watling
c
Institute for Transport Studies, University of Leeds, 34-40 University Road, Leeds, U.K.
Keywords: Passenger Comfort, Clothoid, Path Planning, Automated Vehicle.
Abstract:
Highly automated vehicles operating at SAE automation level 4 and 5 will not require the occupants’ attention
to be on the road at all. They will be free to amuse themselves as passengers. This will have the side effect
of making them more vulnerable to motion sickness. Automated vehicles must plan paths which are feasible
for the vehicle and comfortable for its occupants. In railway and highway design, paths with clothoid based
transitions provide feasibility and comfort. This paper proposes a method for generating such a path using
constrained non-linear optimization and compares it to an existing method based on root finding.
1 INTRODUCTION
Smooth paths for Automated Vehicles are important
for ensuring dynamic feasibility(LaValle and Leidner,
2006a) and passenger comfort (Elsner, 2018). Nu-
merous representations have been developed to ac-
company different planning algorithms (LaValle and
Leidner, 2006b), (Katrakazas et al., 2015),(Paden
et al., 2016), (Schwarting et al., 2018). These include
cubic splines (Deits and Tedrake, 2015), combina-
tions of lines and arcs with minimum length (Dubins,
1957) and (Reeds and Shepp, 1990), parametric con-
tinuous curvature paths (Fraichard and Scheuer, 2004)
or clothoids (Wilde, 2009).
Considerable work has been done to develop em-
pirical measures which correlate well with passenger
comfort. Generally, acceleration and sometimes its
derivative jerk are taken to cause physical discom-
fort if they exceed some threshold. The effect of high
acceleration on the human body is well known from
studies undertaken on pilots and astronauts: g-forces
are certainly noticeable and at a high level will even-
tually lead to unconsciousness and death (McKen-
ney, 1970). At more modest levels acceleration is de-
tected by the inner ear and can lead to motion sickness
(Beard and Griffin, 2014). The problems associated
with excessive jerk are more difficult to quantify but
in certain circumstances, such as very short duration
motions they can be strongly associated with physical
a
https://orcid.org/0000-0002-2297-0441
b
https://orcid.org/0000-0002-2132-4077
c
https://orcid.org/0000-0002-6193-9121
discomfort (McKenney, 1970). There are also psy-
chological factors which may come into play when
riding in an automated vehicle such as perceived risk.
Some of these can be taken into account at the plan-
ning stage such as keeping a sufficient distance from
obstacles to which a human driver would be able to
respond (Elsner, 2018).
Based on the assumption that keeping acceleration
and its rate of change tightly bounded, while main-
taining sufficient distance from any obstruction, leads
to maximum passenger comfort, it is possible to eval-
uate some of the different path representations. All
path requirements can be met with any representation,
the difference is the efficiency with which the relevant
parameters can be evaluated. For the cubic spline the
position and derivatives can be evaluated cheaply to
check obstacle constraints are satisfied but the curva-
ture rate or sharpness must be derived from samples
along the curve once it is plotted.This is similar to the
way the curvature of existing roads can be measured
based on a series of samples along them (Zamfir et al.,
2016). For a clothoid the curvature rate (sharpness) is
the defining parameter so it is cheap to evaluate for
each section, however the position must be computed
by evaluating Fresnel integrals (Wilde, 2009).
Clothoid curves have been in use for a long time in
the design of highway and railway easement curves to
transition between straight and curved sections com-
fortably and safely (Levien, 2008). For this reason we
propose that the use of clothoid curves (with an ap-
propriate upper bound on sharpness and curvature) is
sufficient to ensure the physical comfort of the occu-
pants without further experimental results, and there-
Lambert, E., Romano, R. and Watling, D.
Optimal Path Planning with Clothoid Curves for Passenger Comfort.
DOI: 10.5220/0007801806090615
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 609-615
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
609

fore will proceed to address the problem of calculat-
ing the parameters for curves of this type which join
a given origin and destination as addressed by (Gim
et al., 2017) and (Wilde, 2009).
This paper goes on to describe a method for iden-
tifying the parameters of a clothoid spline joining two
points based on constrained non-linear optimization
in Section 4, and compares it to the bisection method
proposed by (Gim et al., 2017) detailed in Section 3.
1.1 Appropriate Limits
Correct choice of curvature and curvature rate limit is
essential for a smooth ride. The length of easement
curve required for a particular turn of curvature κ =
1/R is given by
s = κ/α
max
(1)
Certain parameters have been specified for Eu-
ropean Railway Design in ES13803 (Fischer, 2008).
These include a maximum cant rate of 50mm/s. Cant
is the height of one railway track above another and
is related to the path curvature by the requirement the
track remain ’balanced’ meaning that both rails are
loaded equally as a train passes over at design speed.
As a result, maximum sharpness α can be ex-
pressed in terms of the cant rate E assuming a bal-
anced track of gauge G and constant traversal speed
V .
α =
Eg
V
3
G
(2)
where g is the acceleration due to gravity, approxi-
mately 9.81m/s
2
. The appropriate sharpness to match
the cant rate limit is found to be α
max
= 4x10
−
5m
−
2.
If this rate can be sustained on existing roads without
requiring an unacceptable reduction in forward speed,
Level 5 autonomy could be as smooth and pleasant
environment for work or rest as a typical train jour-
ney, along with the additional privacy of car travel.
2 PROBLEM STATEMENT
Given a workspace W = IR
2
and an obstacle region
O ⊂ W and a robot defined by a rigid body A ∈
W . Configuration space C can be broken down into
C
obs
and C
f ree
. A single query must provide an ini-
tial configuration q
I
∈ C
f ree
and a goal configuration
q
G
∈ C
f ree
. The problem is to compute a continuous
path over τ : [0,L] → C
f ree
such that τ(0) = q
I
and
τ(L) = q
G
This is also known as the piano mover’s problem,
for more details see (Siciliano and Khatib, 2016). A
car can be treated as a rigid body that moves in a plane
with a state x = [x,y,ψ] where x and y indicate posi-
tion of the vehicle control point in the 2D plane and ψ
is the forward direction of the vehicle, measured an-
ticlockwise from the x-axis. Configuration space has
dimension C = R
2
+ S
1
.
We place an additional restriction that the path
τ must have piecewise constant sharpness α =
d
2
ψ/ds
2
≤ α
max
so it takes the form of a clothoid
spline. The peak curvature must also be less than a
comfortable maximum κ = dψ/ds ≤ κ
max
3 METHOD 1: BISECTION
One approach to generating true clothoid curves be-
tween two positions is based on root finding. A gen-
eral approach for creating parametrized Continuous
Curvature Paths (pCCP) based on clothoids is detailed
in (Gim et al., 2017). The process begins with a dis-
crete set of samples, such as could be produced by
a lattice planner which did not take into account dif-
ferential constraints. Central to this approach is the
identification of the parameters sharpness α
1
and de-
flection δ
1
describing a matched clothoid pair which
terminates at a specified x
G
= [x
G
,y
G
,ψ
G
], κ
G
=0. The
constraint on heading and curvature can be used to
calculate the sharpness and deflection of the second
clothoid segment from the first. The terminating po-
sition can be found by evaluating the Fresnel inte-
grals to find the 2D position error with respect to q
G
.
The error can be expressed relative to the end of the
clothoid pair to get the forward and lateral compo-
nents. There is then a two dimensional root finding
process based on bisection to arrive at the parameter
values which drive lateral error to zero.
A single clothoid segment parametrized in s is
defined by the a constant sharpness α = d
2
ψ/ds
2
along its length. States on the path τ(s) =
[x(s),y(s),ψ(s),κ(s)] can be found by evaluating the
Fresnel integrals.
κ(s) = αs (3)
ψ(s) =
αs
2
2
(4)
x(s) =
∫
s
0
cosψ(u)du (5)
y(s) =
∫
s
0
sinψ(u)du (6)
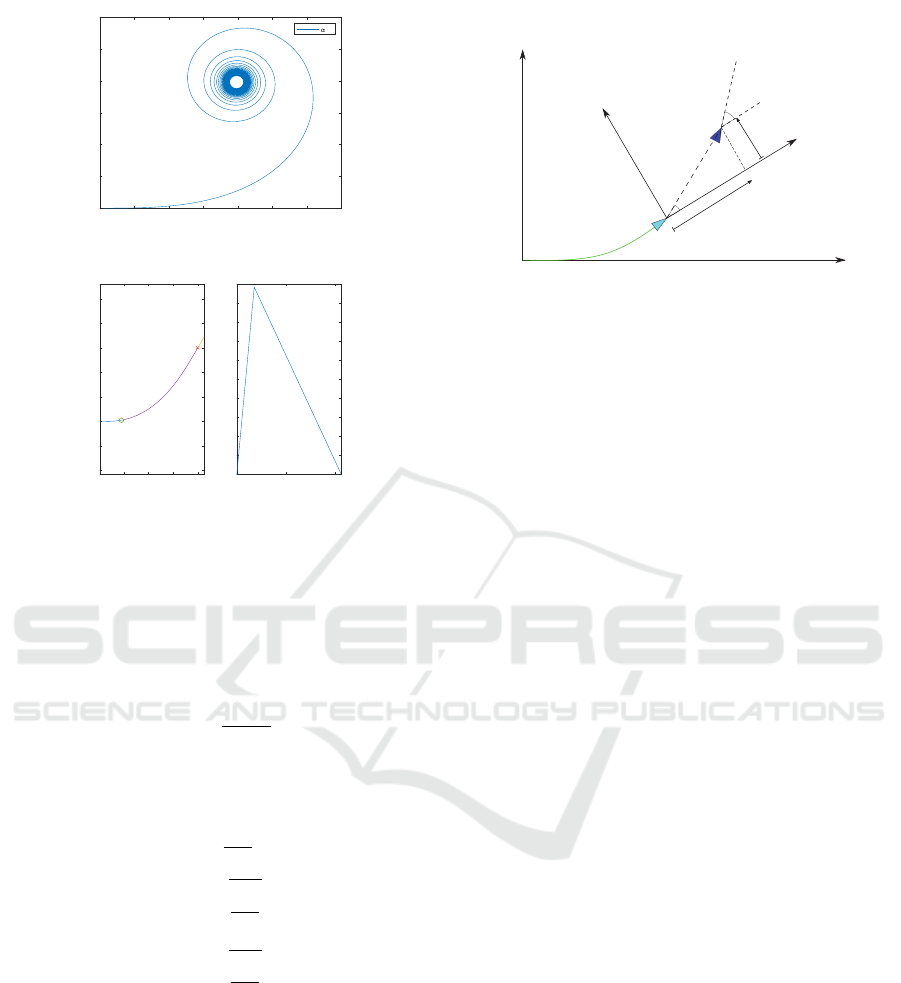
The result is a spiral shown in Figure 1. As an
easement curve, the most useful section is close to
the origin where the curvature is low and it is well
approximated by a cubic.
It is possible to construct a continuous curvature
path starting and ending with a straight line using two
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
610
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
x(m)
0
0.1
0.2
0.3
0.4
0.5
0.6
y(m)
=5
Figure 1: A clothoid spiral with sharpness constant α = 5.
2 4 6 8
x [m]
-4
-2
0
2
4
6
8
10
y [m]
0 5 10
travel length [m]
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
curvature [1/m]
Figure 2: A matched pair of clothoids suitable for joining
two straight lines.
matched clothoid curves, one increasing the curva-
ture and the other decreasing it to maintain continuity.
This construction is shown in Figure 2. This gives
rise to some analytic relations between the first and
second matched clothoid which are reproduced from
(Gim et al., 2017).
κ
1
=
2δ
1
α
1
(7)
κ
2
= κ
1
(8)
δ
2
= θ
b
− δ
1
(9)
α
2
=
κ
2
2
2δ
2
(10)
s
1
=
2δ
1
α
1
(11)
s
2
=
2δ
2
α
2
(12)
Using these relations and the bound-
ary condition of the starting configuration
q
I
= [x,y, ψ, κ] = [0, 0, 0, 0] and ending configu-
ration q
G
= [x
f
,y
f
,ψ
f
,0] the matched pair is fully
defined by the sharpness α
1
and deflection δ
1
of the
first segment. These parameters can be found as roots
of the (signed) lateral error.
The iterative procedure, based on the bisection
method for root finding is given below, using the sign
convention in Figure 3.
y
x
D[1]
D[2]
D[3]
τ(L)
x
G
Figure 3: The sign convention used for the forward and lat-
eral error to the goal at the end of the curve.
while sol==0 && iter<80
k1 = sqrt(2*deflection1*alpha1);
k2 = k1;
deflection2 = boundary(3) - deflection1;
alpha2 = k2*k2/(2*deflection2);
S1 = sqrt(2*deflection1/alpha1);
S2 = sqrt(2*deflection2/alpha2);
[x, y, psi, kappa] = clothoid_pair(alpha1,...
S1, -alpha2, S2);
n = length(x);
final_pose = [x(n), y(n), psi(n)];
D = decompose(boundary(1:3), final_pose);
DeT = D(1);
De = D(2);
iter = iter+1;
if abs(De)< tol
if DeT >= 0
sol=1;
end
end
if lambda*De<0
dAlpha = dAlpha/2;
end
if lambdaT*DeT<0
dDeflection = dDeflection/2;
end
lambda = De;
lambdaT = DeT;
dAlpha = abs(dAlpha)*sign(lambda);
dDeflection = -abs(dDeflection)*sign(lambdaT);
alpha1 = alpha1 + dAlpha;
deflection1 = deflection1 + dDeflection;
end
On careful examination there are a few important
differences from bisection as described in a textbook
Optimal Path Planning with Clothoid Curves for Passenger Comfort
611

and the presented method. Convergence is guaran-
teed of the textbook method for finding a root of a
scalar function of one dimension provided a single
zero crossing exists within the given interval (Atkin-
son, 1988). The number of iterations required to re-
duce the error below a given threshold has an upper
bound given by
|α − c
n
| ≤ [
1
2
]
n
(b − a) (13)
where b−a denotes the length of the original interval,
c
n
is the estimate after n iterations and α is the true
value of the root.
The method of (Gim et al., 2017) listed in Verba-
tim 3 does not require an interval containing the root,
only an initial guess smaller than the true value for
each parameter because there is an additional search
procedure. This relies on knowledge of the direction
of relative motion of the end of the path, in the for-
ward and lateral directions based on the two parame-
ters. The justification is detailed in (Gim et al., 2017).
By inspection of the goal pose either two or four
clothoids are composed.
n
c
=
2 if ψ
G
> atan2(y
G
,x
G
);
4 if ψ
G
< atan2(y
G
,x
G
).
(14)
The four clothoid case proceeds by searching over the
heading of an intermediate point, at each iteration per-
forming the two clothoid estimation twice, once be-
fore the intermediate point and once after.
4 METHOD 2: NON-LINEAR
OPTIMIZATION
Numerical optimization based path planning is widely
used as it leads to ’better’ paths, having a lower
cost integral over their length with reduced sam-
pling artefacts compared to sampling based meth-
ods. The downside of numerical optimization is the
higher computational cost to find a path. However,
the cost is dependant on the dimension of configura-
tion space, and road vehicles are well served by plan-
ning in C = R
2
+ S
1
, which is comparatively low. A
good review of planning techniques is given by (Si-
ciliano and Khatib, 2016).
The relations given in Equation 7- 12 are first
used to reduce the number of parameters which need
to be searched to two, sharpness α
1
and deflection
δ
1
.The cost is based on the squared distance along the
curve, made up of the first clothoid length, the second
clothoid length and the straight line to the goal at the
end.
J(α
1
,δ
1
) = (s
1
+ s
2
+ ||x
G
− τ(L)||)
2
(15)
ˆ
α
1
,
ˆ
δ
1
= arg min
α
1
,δ
1
J(α
1
,δ
1
) (16)
subject to
τ
(
0
) = [
0
,
0
,
0
,
0
]
τ(1) = [x
G
,0]
α
i
≥ 0 ∀i ∈ [1,...,n
c
]
δ
i
≥ 0 ∀i ∈ [1,...,n
c
]
κ(p) ≤ κ
max
∀p ∈ [0,L]
α(p) ≤ α
max
∀p ∈ [0,L]
(17)
5 PRELIMINARY RESULTS AND
DISCUSSION
The two methods were used to estimate the pa-
rameters of a transition curve starting at the ori-
gin with zero curvature and terminating at x
G
=
[8.000,6.000,1.047(60π/180)]. This boundary con-
dition requires two clothoids according to Equation
14.
2 4 6 8
x [m]
-4
-2
0
2
4
6
8
10
y [m]
0 5 10
travel length [m]
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
curvature [1/m]
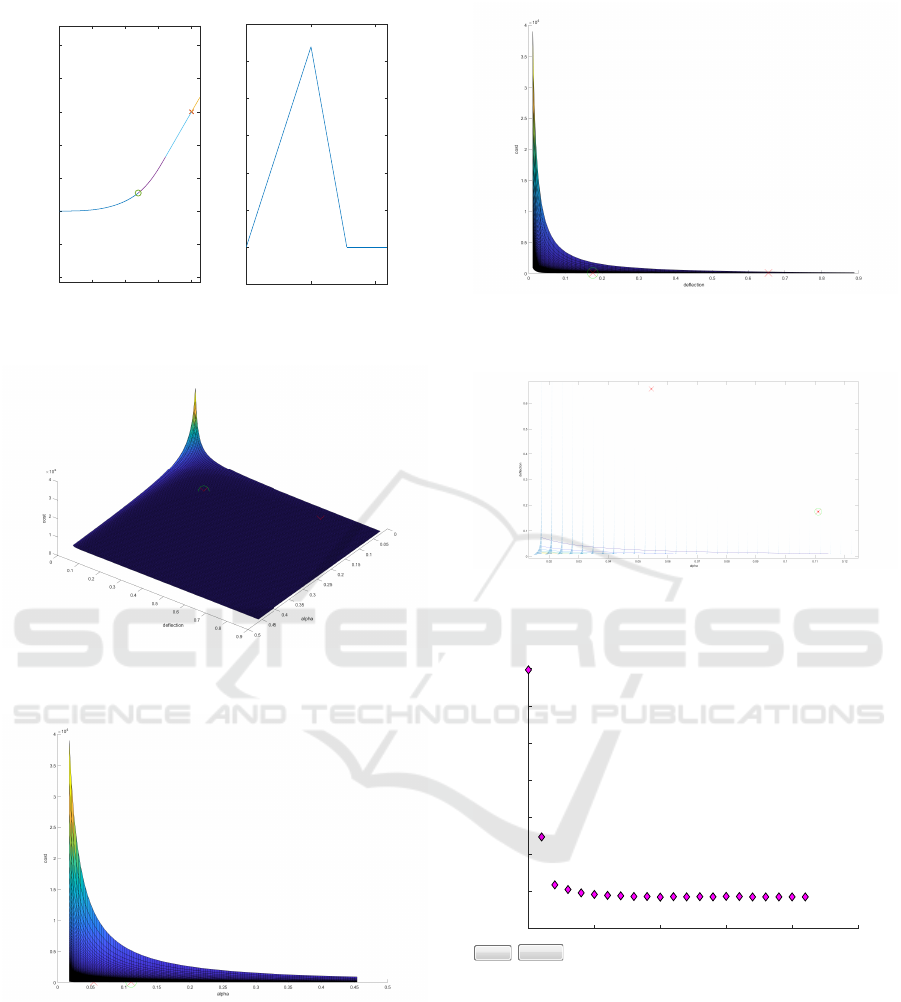
Figure 4: Bisection method: Path output and curvature
[α
1
,δ
1
] = [0.0545,0.6554].
The results of the two approaches for a single
boundary condition representing a fairly tight left turn
of 60 degrees are shown in Table 1 and Figure 4 and
5. Interestingly the estimated parameters are differ-
ent, resulting in substantially different paths. Both
reach the target point with high accuracy and satisfy
the constraints to some degree.
Comparing in terms of optimality according to the
cost function chosen for the optimization method, the
terminal cost of the solution produced by bisection
is lower than that produced by fmincon the non-linear
constrained optimization tool in MATLAB with much
greater computational effort.
The investigation of the cost surface for this single
numerical example is seen in Figure 6 to be extremely
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
612
2 4 6 8
x [m]
-4
-2
0
2
4
6
8
10
y [m]
0 5 10
travel length [m]
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
curvature [1/m]
Figure 5: Optimization method: Path output and curvature
[α
1
,δ
1
] = [0.1111,0.1746].
Figure 6: The cost function surface for fmincon with pa-
rameter estimates from both methods shown as red crosses,
bisection with a green circle.
Figure 7: Cost against sharpness α, parameter estimates
from both methods shown as red crosses, bisection with a
green circle
flat. This causes fmincon to terminate before reach-
ing the optimum based on a step size threshold. It ap-
pears that level sets of the cost have a shape close to
y=1/x as seen in Figure 9. The path produced by the
bisection method is shorter than the one identified by
a non-linear constrained optimization where the cost
was based on the path length. The different treatment
of the constraints permits slightly larger violation by
Figure 8: Cost against deflection δ, parameter estimates
from both methods shown as red crosses, bisection with a
green circle.
Figure 9: The cost function gradient for fmincon with pa-
rameter estimates from both methods shown as red crosses,
bisection with a green circle.
0 5 10 15 20 25
Iteration
110
120
130
140
150
160
170
180
Function value
Current Function Value: 118.495
Stop
Pause
Figure 10: Iterations of fmincon with α = 0.03 initial value.
bisection, but this does not adequately explain the sig-
nificant difference in the resultant path.
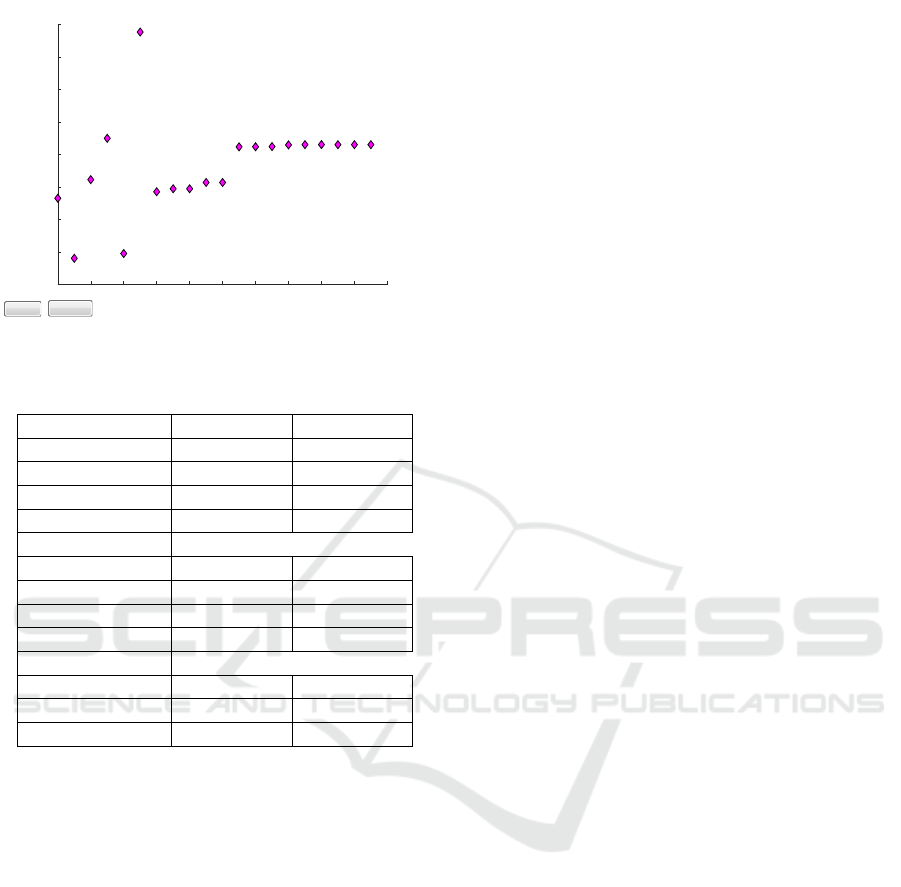
To investigate the possibility both methods may
have converged to different local minima, both meth-
ods were initialized at the minimum reported by the
other. The result was that fmincon terminated very
close to the bisection minimum, with some constraint
violation, the step size threshold preventing further re-
duction in cost. The evolution for the two initial con-
ditions is shown in Figure 10 and Figure 11. Both
terminate due to step size with an infeasible point.
Optimal Path Planning with Clothoid Curves for Passenger Comfort
613
0 2 4 6 8 10 12 14 16 18 20
Iteration
113.2
113.22
113.24
113.26
113.28
113.3
113.32
113.34
113.36
Function value
Current Function Value: 113.286
Stop
Pause
Figure 11: Iterations of fmincon with α =
ˆ
α
bisection
initial
value.
Table 1: Comparison table for the two methods.
fmincon Bisection
α
1
0.0545 0.1111
δ
1
0.6554 0.1746
Cost 118.4954 113.2531
Path Length 10.8856 10.642
Final Pose
x 6.477 7.996
y 3.361 5.992
ψ 1.0473 1.0452
κ -7.992e-05 -1.4731e-04
Constraint Error
Lateral 2.2751e-05 -4.4731e-06
Heading -1.4429e-04 2.000e-03
Curvature -7.992e-05 -1.4731e-04
Bisection, by contrast converged to almost the
same point as before when initialized from the fmin-
con minimum. The impressive stability may be due
to the search procedure exploiting the relationship be-
tween the input parameters and the error.
6 CONCLUSION
The results presented show the existing bisection
method from (Gim et al., 2017) is superior for find-
ing a minimum length, continuous curvature path be-
tween an initial and final pose in this case. Viola-
tion of heading and curvature constraints is slightly
higher, but the solution path length is shorter and the
results are more stable to changes in the starting esti-
mate. The potential advantages of restating the prob-
lem as a non-linear constrained optimization are not
realized because the solver is not able to improve the
cost while meeting the constraints. The given opti-
mization approach requires further development such
as a more robust solver which can find a global mini-
mum.
We argue the non-linear constrained optimization
formulation is worth pursuing for many applications
because other constraints can be applied without hav-
ing to redesign the heuristic. For example, polygo-
nal obstacle constraints could be included with little
modification. The cost function can also be modi-
fied to prioritize different aspects such as minimiz-
ing curvature rather than path length. Another advan-
tage is the availability of robust general optimization
solvers such as ant colony optimization and genetic
algorithms which could be employed if necessary to
find a global minimum.
7 FURTHER WORK
There is more work to be done tuning the cost func-
tion and solver so a stable minimum can be found on
this particular example. Beyond this, a range of other
simple two-clothoid examples could be generated to
show that convergence is consistent. Left and right
90 degree turns of different radius would be sufficient
to produce a roadmap approximating a grid. There is
no reason to believe the cost surface for the reported
case is particularly difficult to solve so investigation
of other boundary conditions is important. The next
step is to examine the four clothoid case, which allows
the creation of ‘lane change’ manoeuvres suitable for
overtaking, and then sequences of clothoids forming
splines.
One motivation for this work is the reduction of
motion sickness for passengers of autonomous vehi-
cles by smooth driving using clothoids. There are
numerous approximations to true clothoids which are
convenient in some cases, such as polynomial approx-
imation for x and y by Taylor expansion. The use of
approximate curves may increase numerical stability,
but will result in deviation from the exact clothoid
profile. These small curvature discontinuities in the
path may or may not be noticeable by passengers. A
study where human participants rate their experience
when taken on an automated ride using true clothoid
curves and approximate ones would provide justifica-
tion for further work on path generation with the exact
integrals.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
614

ACKNOWLEDGEMENTS
This research was made possible thanks to the finan-
cial support of a full-time EPSRC Doctoral Training
Partnership Studentship - Institute for Transport Stud-
ies, and also thanks to the financial support of CASE
partner Guidance Automation Limited.
REFERENCES
Atkinson, K. E. (1988). An Introduction to numerical anal-
ysis, 2nd edition.
Beard, G. F. and Griffin, M. J. (2014). Motion sickness
caused by roll-compensated lateral acceleration: Ef-
fects of centre-of-rotation and subject demographics.
Proceedings of the Institution of Mechanical Engi-
neers, Part F: Journal of Rail and Rapid Transit,
228(1):16–24.
Deits, R. and Tedrake, R. (2015). Efficient mixed-
integer planning for UAVs in cluttered environments.
Robotics and Automation (ICRA), 2015 IEEE Interna-
tional Conference on, pages 42–49.
Dubins, L. E. (1957). On Curves of Minimal Length with a
Constraint on Average Curvature, and with Prescribed
Initial and Terminal Positions and Tangents. American
Journal of Mathematics,, 79(3):497–516.
Elsner, J. (2018). Optimizing Passenger Comfort in Cost
Functions for Trajectory Planning.
Fischer, S. (2008). Comparison of railway track transi-
tion curves in consideration of clothoid, cosine and
wiener bogen transition curves in the respect of the
env 13803-1, the
¨
Obb standard and the hungarian rail-
way design regulations (tadr, nrr) in the interval of
v=120. . . 160 km/h for normal track gauge.
Fraichard, T. and Scheuer, A. (2004). From Reeds and
Shepp’s to Continuous-Curvature Paths. IEEE Trans-
actions on Robotics, 20(6):1025–1035.
Gim, S., Adouane, L., Lee, S., and D
´
erutin, J. P. (2017).
Clothoids Composition Method for Smooth Path Gen-
eration of Car-Like Vehicle Navigation. Journal of
Intelligent and Robotic Systems: Theory and Applica-
tions, 88(1):129–146.
Katrakazas, C., Quddus, M., Chen, W.-H., and Deka, L.
(2015). Real-time motion planning methods for au-
tonomous on-road driving: State-of-the-art and future
research directions. Transportation Research Part C:
Emerging Technologies, 60:416–442.
LaValle, S. M. and Leidner, D. (2006a). Chapter 13: Dif-
ferential Constraints. In Planning Algorithms, chap-
ter 13, pages 715–786. Cambridge University Press.
LaValle, S. M. and Leidner, D. (2006b). Chapter 3: Geo-
metric Representations and Transformations. In Plan-
ning Algorithms, chapter 3, pages 81–126. Cambridge
University Press.
Levien, R. (2008). The Elastica: A Mathematical History.
McKenney, W. R. (1970). HUMAN TOLERANCE TO
ABRUPT ACCELERATIONS: A SUMMARY OF
THE LITERATURE. Dynamic Science, 70(13).
Paden, B., Cap, M., Yong, S. Z., Yershov, D., and Frazzoli,
E. (2016). A Survey of Motion Planning and Control
Techniques for Self-driving Urban Vehicles. pages 1–
27.
Reeds, J. A. and Shepp, L. A. (1990). Optimal paths for
a car that goes forwards and backwards. 145(2):367–
393.
Schwarting, W., Alonso-Mora, J., and Rus, D. (2018). Plan-
ning and Decision-Making for Autonomous Vehicles.
Annual Review of Control, Robotics, and Autonomous
Systems, 1(1):annurev–control–060117–105157.
Siciliano, B. and Khatib, O. (2016). Robotics and the Hand-
book, pages 1–6. Springer International Publishing,
Cham.
Wilde, D. K. (2009). Computing clothoid segments for
trajectory generation. 2009 IEEE/RSJ International
Conference on Intelligent Robots and Systems, IROS
2009, pages 2440–2445.
Zamfir, S., Drosescu, R., and Gaiginschi, R. (2016). Prac-
tical method for estimating road curvatures using on-
board GPS and IMU equipment. IOP Conference Se-
ries: Materials Science and Engineering, 147(1).
Optimal Path Planning with Clothoid Curves for Passenger Comfort
615
