
Smith Predictor for Control of the Temperature Process with Long
Dead Time
Nikolajs Bogdanovs
1,2
, Romualds Beļinskis
2
, Andris Krūmiņš
3
, Ernests Petersons
2
and Aleksandrs Ipatovs
2
1
Building Automation Department, Lafivents LTD, Bauskas street 58 Street, Riga, Latvia
2
Department of Transport Electronics and Telematics, Riga Technical University, Riga, Latvia
3
Faculty of Civil Engineering, Institute of Heat, Gas and Water Technology, Riga Technical University, Riga, Latvia
Keywords: PID Regulator, Smith Predictor, Transfer Function, PLC Controller.
Abstract: The analysis of a problem of development of control systems for objects with big time delay is carried out in
this work. For such objects it is difficult to provide high-quality control, because the control is carried on the
last status of object’s output. The main setup methods of PID regulators have been examined. Based on this
analysis the technique of complete synthesis of the regulator of higher level is given in order to regulate
building’s heating system. This work offers a new method of object’s control with distributed delay. As the
test bed for the offered structure of control the valve of hot water supply in a heat-node is used. Using the
test bed the stability of the system with time delay have been studied, which is controlled by the PID
regulator assisted by Smith Predictor used to compensate the dead time.
1 INTRODUCTION
Energy saving in the field of building’s heating is
important task, considering both the criteria of
market capacity and the aspect of status of
engineering systems. In the European Union,
buildings are responsible for 40% of total energy
consumption including approximately 20% absorbed
in heating which can be effectively used in the
demand side management (DSM) strategy as a shift
able load.
Energy saving in heating systems from control
point of view is characterized by the need of stable
maintenance of air temperature for building’s
premises at adjusted comfort level in the presence of
external perturbations affecting the building. Today,
considering the development of automation
equipment and large-scale implementation of
individual thermal points, implementation of more
effective heat controlling algorithms became
possible (Altmann et al., 2005). Thermo-hydraulic
processes in the building have big momentum; have
non-linear or variable linear dynamic behaviour and
distributed nature, subjected to vast number of the
influencing factors, which direct measurements are
extremely difficult in practice.
The management with prediction models in
microclimate control algorithm allows increasing the
effectiveness of HVAC system in buildings. There is
a problem of the correct setup of the heating
equipment as excessive increase in temperature on
the heating element leads to overheating of rooms,
which results in excessive consumption of thermal
resource and decreased comfort level. At the same
time it is necessary to consider that the greatest
saving of thermal energy in heating systems of
buildings is reached by using intellectual
automation. It is explained by the fact that automatic
control allows to save heat due to accounting of
those factors, which can't be considered by
calculation methods, such as:
influence of solar radiation;
accounting of fluctuations in outside air
temperature;
heat release from people and equipment;
chaotic operating time of ventilation.
Thus, the development of intellectual management
systems for heating systems is a relevant task. The
adjustment method based on prediction is offered in
this work.
Predictive control is not a single strategy, but a
set of control methods with predictive model of the
process expressed in specific order to obtain a
Bogdanovs, N., Belinskis, R., Kr
¯
uminš, A., Petersons, E. and Ipatovs, A.
Smith Predictor for Control of the Temperature Process with Long Dead Time.
DOI: 10.5220/0007808501730179
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 173-179
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
173

control signal by minimizing objective’s function
subjection to some constraints. In building’s control,
one would aim to optimize delivered energy
subjecting to constraints. One of advantage of this
method is Smith Predictor time delay is effective
taken outside the control loop in the transfer
function relating the process output to setpoint. This
method introduces extreme instability into the
variable control system (Bogdanovs et al., 2018).
Smith Predictor control is a good decision to the
problem of controlling the time delay systems. It
approach improves the performance and reliability
of the system in the real time applications. The
Smith Predictor is a popular and effective long
compensator for stable processes. One of advantage
of this method is Smith Predictor time delay is
effective taken outside the control loop in the
transfer function relating the process output to
setpoint. This method introduces extreme instability
into the variable control system.
1.1 Related Works
The paper (Basnayake et al., 2015) in his work
offers to replace PLC controllers of building’s
automatics with new controllers designed based on
artificial intelligence. These controllers use
intellectual identification of users.
Work describes smart home systems that
decrease energy consumption by studying human
behavior pattern (Badlani and Bhanot, 2011).
Author proposed in paper simulation methods for
the temperature control systems. Work results shown
success usability of test model to use this regulation
method in PLC controller for temperature control in
buildings (Roengruen et al., 2009).
Book author describes regulation principles of
process control and regulation methods in variable
processes in building heating systems. This book
discusses different approaches for regulation loops.
It also shows the applying of Smith Predictor model
in process control (King, 2010).
Author mentions the disadvantages of the
applying the classical PID controller regulation and
tuning. The paper shows examples how to improve
system regulation with Smith Predictor. This control
method allows avoids decreasing of regulator gain
factor as result the system regulation performance
increases (Srinivas et al., 2010).
This work describes in the article compares the
use of the Smith predictor control model with the
PID regulator and the Model predictive control. The
proposed comparison allows a better understanding
of the use of models for the application of control
characteristics in industrial equipment. (Vidyamol
and Nasar, 2015).
Despite the large number of valuable research
work describing different types of management,
there is no management system, which could
increase the effectiveness in existing buildings by
using predictions. Control algorithms are developed
for such research, described below, based on Smith's
predictor, which are designed and used in building
management system.
2 FORMULATION OF THE
PROBLEM
In automation of heating, ventilation and air
conditioning (HVAC) systems the PID regulators
are used everywhere. They allow regulating
motorized air dampers and hydraulic valves,
frequency converters of pumps, fans and
compressors are regulated. The problem of
controlling inlet air temperature by direct-flow air
handling unit (AHU) with water heater is considered
in this publication. In cases when such AHU is
equipped with simple ON/OFF ventilator without
frequency converter or EC-regulator fan, the
maintenance of stable set inlet air temperature is
carried out by motorized valve through PID
regulator (Prabhakara Rao and Voleti, 2011).
Described AHU are found on outdated HVAC
systems and also in specialized systems of
production, professional kitchens, etc.
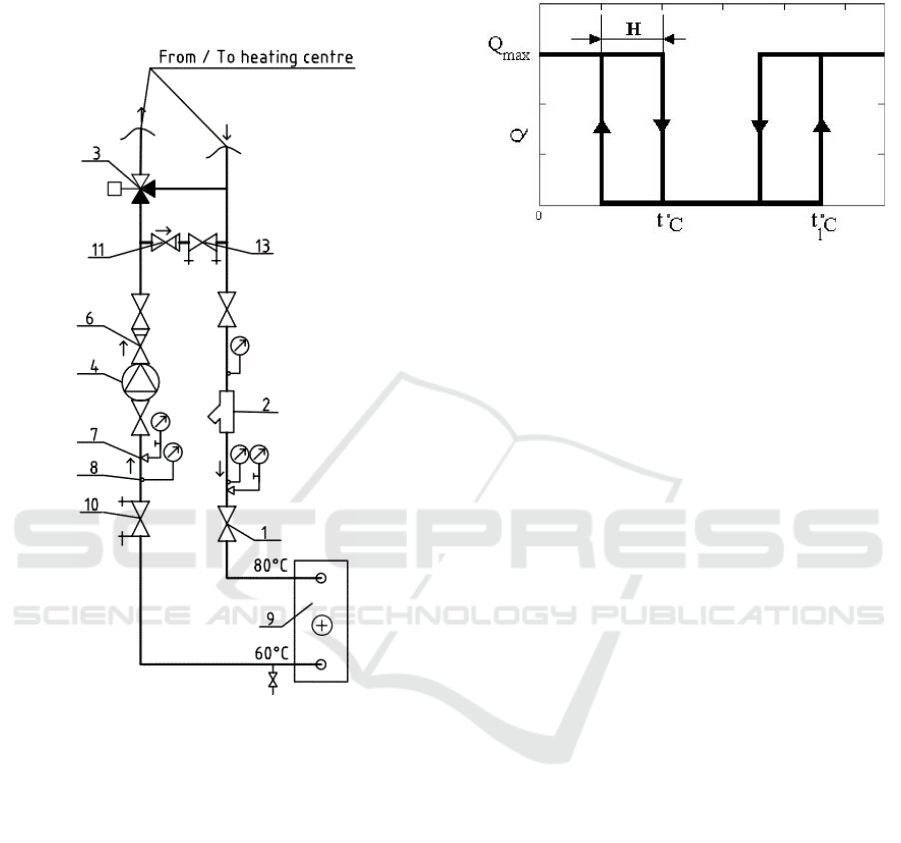
In a commonly used shunt group scheme the
circulation pump (4) is operating constantly,
ensuring freeze prevention and a steady water
temperature regulation with control valve (3). See in
Figure 1.
In the commonly, used shunt group scheme
circulation pump is operating constantly, ensuring
freeze protection and a steady water temperature
regulation with control valve, see in Figure 1.
Where:
1 – Shut off valve; 2 – Strainer; 3 – Three-way
valve with actuator; 4 – Circulation Pump; 5,6 -
Check valves; 7 – Thermometer; 8 – Manometer; 9 -
Water/Air Heat exchanger; 10,13 – Balancing
valves.
By launching such system, in order not to over
cool inlet air, the triple running valve is usually
completely opened, providing the maximum flow of
heat carrier g and respectively the heat power Q.
The problem is that inlet air temperature
undergoes strong fluctuations while the PID
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
174
regulator finds the necessary valve position for
heating the air from outside temperature to the one
that is set. It negatively reflects on thermal comfort
of people indoors and also it can influence
technological processes.
Figure 1: A typical AHU shunt group hydraulic scheme.
Heating energy transferred to the airflow by
heating coil can be calculated using formula:
( - )
cw in out
Q g p c T T
(1)
Where:
Q - heating output, kW,
g - heating fluid flow, m3/s,
ρ - heating fluid density, kg/m3,
cw
c
- heating fluid specifies heat, kJ/(kg*°C),
outin
TT ,
- supply and return flow temperatures, °C.
In three-position regulators the actuator can hold
three positions: completely open, normal (average)
or completely closed [7.8].
The value of hysteresis H affects the accuracy
temperature adjustment. Reduction the value of
hysteresis zone not only increases the accuracy of
adjustment, but also the frequency of opening the
valve that leads to a fast wear of commutation
elements.
Figure 2: Characteristics of three-position regulator.
3 ENHANCED SMITH
PREDICTOR FOR HEATING
CONTROL
Buildings’ modern heat-nodes regulating heat
consuming by the use of valves and pumps which
regulate heat supply to the building in compliance
with a desirable temperature for locations.
According to the temperature diagram and weather
conditions further regulation of the consumed
thermal energy takes place, thus, providing
comfortable conditions taking into account the
temperature of outside air. Microprocessor controller
serves as a central device, which controls operation
of valves and pumps. It allows regulating heat
carrier’s temperature according to temperature of
outside air; to automatically reduce temperature and
to control circulation pumps (Tala and Daxini,
2015). Heat carrier’s temperature control is carried
out by means of the PID regulator. Using PID
control for Building Management System (BMS) is
not effective method to control the heating system.
Thus, a considerable change in set point occurs.
Integral terms cause an overshooting error during the
rise.
Since heat-node’s temperature regulation is
carried out by means of PID regulator according to
temperature of outside air (especially in case of
sharp temperature drop), systems form the delay of
automatic control. As each link of the heat-node has
its own response time bringing the negative phase
displacement, it is capable to result in loss of
stability in regulatory system (García and Albertos,
2013; Shi et al., 2008). It is necessary to apply the
ratio between delay value and the object’s time
Smith Predictor for Control of the Temperature Process with Long Dead Time
175
constant, described by the following ratio:
)0,2...0,5(>
T+τ
τ
(2)
T - object’s time constant.
Where
- heating valve delays, depend on
weather and thermo hydraulic processes in the
building.
Time of transport delay is calculated by formula:
υ
L
ε=τ
(3)
L
- the distance from the sensor to the executing
mechanism, m.
- movement speed of the substance m/s.
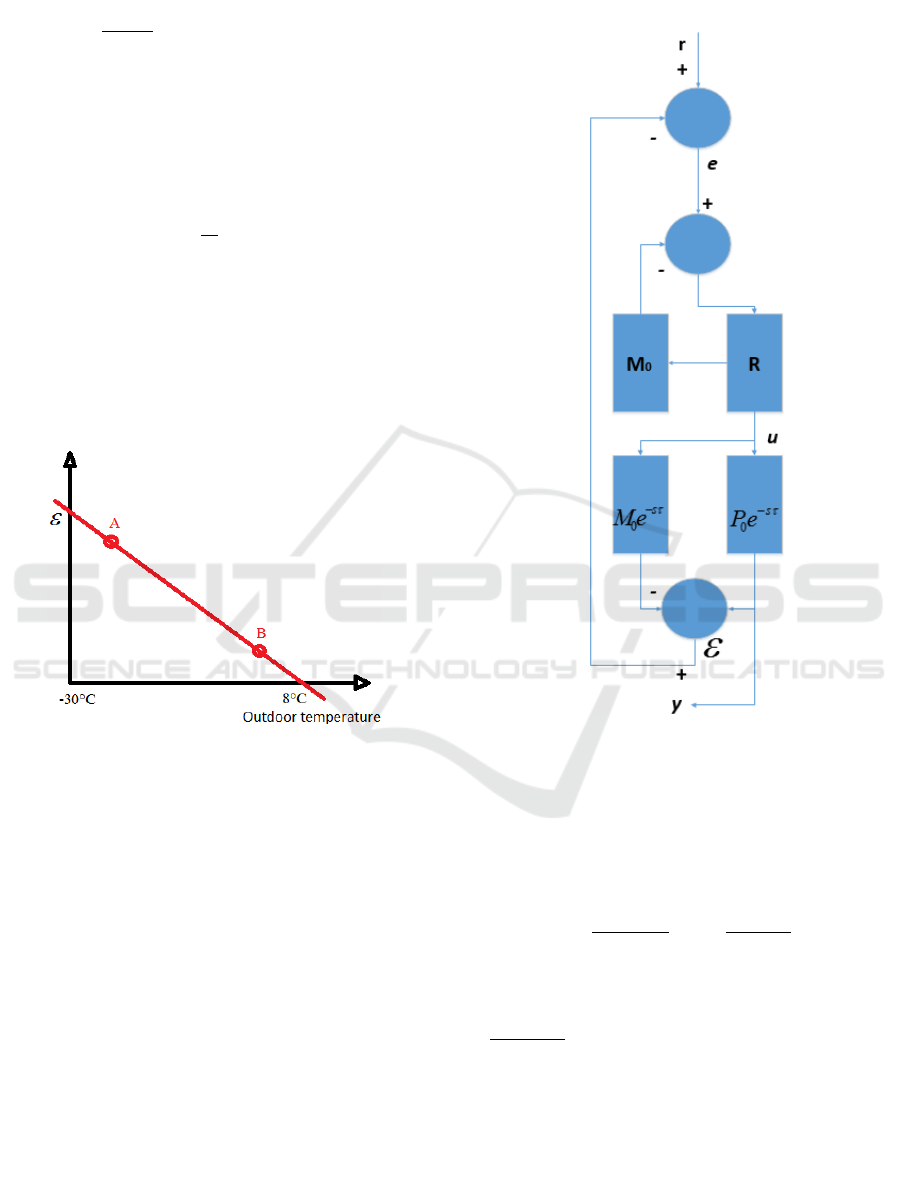
To determine dynamic characteristic
of c the
control object it is necessary to reveal the regularity
in practice as it was done in this work, see Figure 3:
Figure 3: Dynamic characteristics of time delay of outside
temperature.
The dynamic characteristic
was determined
experimentally. The best coefficient was defined at
the temperature of 8 in point A and -23 in point B. A
linear dependence was obtained after this. The linear
dependence for each heating system is separate and
it needs to be defined experimentally
The purpose of Smith’s predictor – to foretell the
signal strength at the object exit before it actually
appears there. Due to this prediction the delay factor
is excluded from the model, which allows predicting
the behaviour of an object before the moment when
signal appears at the exit.
Further, to make a prediction, it is necessary to
use the model of object’s control that consists of
fractional rational part
0
M
and delay
e
− sτ
. Here,
the R – common PID regulator,
sτ
eP
0
–
additional characteristic of the control objects (see
Figure 4).
Figure 4: Control system with Smith's predictor.
We will assume that the model is absolutely
exact. Then the difference between signals on
model’s outputs and the object will be equal to zero
(ε = 0) (Hao et al., 2011). But in that case, directly
from the diagram of Figure 4, it is possible to obtain:
sτ
00
sτ
0
e
RP+
RP
=r
RM+
R
eP=y
11
0
(4)
In this expression the member
0
0
1 RP
RP
represents a transfer function of a
system without delay. And it means that the link
with the time delay is not included in the circuit of
feedback and doesn't affect the stability and high-
speed performance of the system, which means that
there is adjustment in the circuit with the model
without delay, and the transport delay is added to
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
176
receive result (Kato et al., 2005). Due to this
prediction the delay value is excluded from the
model, which allows predicting of object’s
behaviour until the signal appears at the outlet.
Smith's predictor imitates a difference between
the process model with no sensitivity zone and a real
object. This adjusting signal is added to the
measured output signal to foretell what signal would
be at the exit if there were no delay (Dulău et al.,
2010; Zhang, 2013).
The transfer function in (4) models the way a
change in the voltage (0-10Volt) driving the water
valve opening affects the heater temperature.
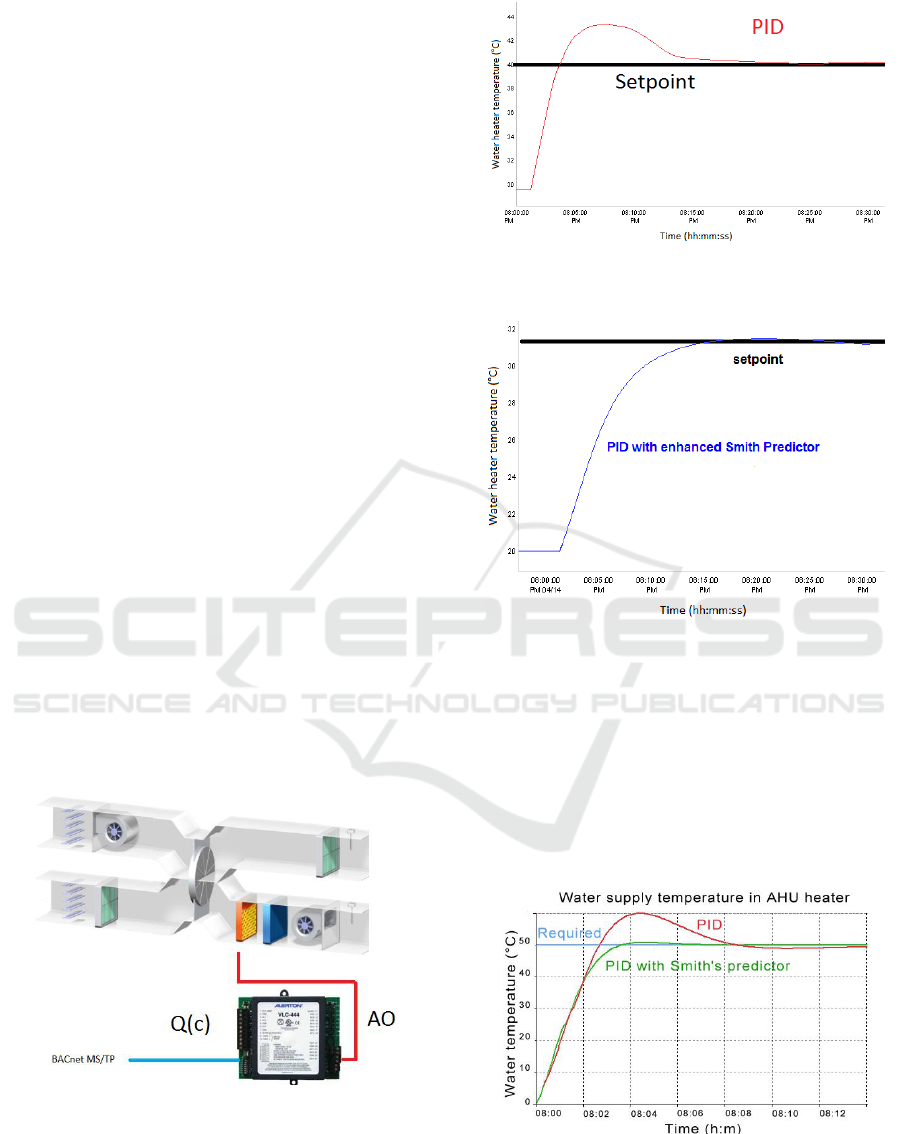
3.1 Practical Implementation of the
Enhanced Smith Predictor for
Heating Control
Simulations of the regulator in simulators based on
Smith Predictor is labour-consuming, as the dynamic
characteristics of
is stochastic and separate for
each building’s heater and it is also hardly
predictable. Simulation and laboratory conditions
can differ highly, therefore, we have to try this
adjustment method in practice and a real object was
used for this, PLC (programmable logic controller)
controller is shown in Figure 5.
The predicted value
goes to Q(c), controller,
which adjusts the controlling influence of AO
(Analog Output).
This heater of the ventilation system is controlled
with PLC controller in which software is written to
control the valve of water heater.
Figure 5: PLC Controller for AHU heater.
The controller by means of BACnet protocol is
connected to the server where archiving of data and
monitoring of the system is carried out. The water
heater valve is a one analog output system.
Figure 6: Experimental results for valve heating control
with PID for outdoor temperature -5°C.
Figure 7: Experimental results for valve heating control
with enhanced Smith Predictor for outdoor temperature -
2°C.
The Figure 6 shows that by using standard PID
regulator the precise adjustment of the heating valve
is not reached and based on this a new method of
adjustment system with great delay was studied. The
Figure 7 shows the experimental (with outdoor
temperature from 8°C to -25°C) result, received with
Smith's predictor.
Figure 8: Results for valve heating control with outdoor
temperature -8°C from PID regulator and PID with
Smith's predictor.
Smith Predictor for Control of the Temperature Process with Long Dead Time
177

The Figure 8 shows the experimental (with
outdoor temperature -8°C) result, received with
Smith's predictor. The structure of this predictor is
also given in this Figure 4.
From Table 1 it can be said that PID with Smith
Predictor gives better transient response
characteristics than PID controller for process with
constant time delay.
Table 1: Comparison of responses.
Model
Characteristics
Max. Peak
(%)
Rise
time(s)
Peak
time(s)
Settling
time(s)
PID
25
420
480
840
PID Smith's predictor
2
118
32
360
4 CONCLUSIONS
The article shows that for objects with a big value of
transport delay it is suggested to use Smith
Predictor. When compared to the usual PID, the
Smith Predictor more improves the system’s
response to set-point changes.
Finally the experimental result of the heating
control with both traditional PID regulator and PID
with Smith predictor are built in PLC
microcontroller. By comparison with traditional PID
regulator, the experimental results demonstrate the
effectiveness of the proposed methods towards the
heating valve delays and system uncertainties
integrated in the building heating control system (see
Table 1). A consistency of Smith predictor control
signals of all possible time delays can be generated
in advance and the actual delays will be
compensated. This control method is mathematically
simple implemented in PLC microcontroller with
reduce resources.
The temperature control system based on the
Smith Predictor controller can precisely control the
temperature inside the instrument. Therefore, it is
able to provide the best temperature for enzymatic
detection to ensure the accuracy of results. Should
the system under control be an integral process,
complementary outside temperature should also be
incorporated into the control system.
In future work is planned to address all above-
mentioned problems within the framework of
research by providing following solutions:
Matlab machine learning toolbox could solve the
problem of optimizing the Building Management
System algorithm by analyzing weather forecast for
the next day and sing Finite Difference Method in
self-learning model. The automation of the home or
the building has a great potential in reducing the cost
and energy consumption using, machine learning for
intelligent control.
ACKNOWLEDGMENT
The research received funding from the ERAF Post-
doctoral Research Support Program project Nr.
1.1.1.2/16/I/001 Research application “Wireless
sensor networks for a building’s energy efficiency
evaluation and data exchange with the building’s
management systems” Nr. 1.1.1.2./VIAA/1/16/228.
REFERENCES
Basnayake, B. A. D. J. C. K., Amarasinghe, Y. W. R.,
Attalage, R. A., Udayanga, T. D. I., Jayasekara, A. G.
B. P., 2015. Artificail Intelligence Based Smart
Building Automation Controller for Energy Efficiency
Improvements in Existing Building, International
Journal of Advanced Information Science and
Technology (IJAIST) ISSN: 2319:2682, Vol .4, No. 8,
pp. 85-91.
Badlani A., Bhanot S., 2011. Smart Home System Design
based on Artificial Neural Networks, ISSN: 2078-
0958 (Print); 2078-0966 (Online), Proceedings of the
World Congress on Engineering and Computer
Science, Vol. I, pp. 106-111.
Bogdanovs, N., Krūmiņš, A., Beļinskis, R., Afoņičevs, V.,
Jeralovičs, V., Ipatovs, A., 2018. Intelligence System
of Building Management System for Energy
Efficiency in the Test Facility. In: Advances in
Wireless and Optical Communications (RTUWO), pp.
1-6.
Roengruen, P., Tipsuwanporn, V., Puawade, P.,
Numsomran, A., 2009. Smith Predictor Design by
CDM for Temperature Control System, International
Journal of Electrical and Computer Engineering,
ISSN:1307:6892, Vol. 3, No. 11, pp. 2538-2542.
Altmann, W., Macdonald, D., Mackay, S., 2005. Practical
Process Control for Engineers and Technicians,
Pactical Handbook, Elsevier, Oxford, ISBN:
0750664002.
Srinivas, P., Raj, P., Rajesh, S., 2012. Modeling and
Simulation of Respiratory Controller Using Labview,
International Journal of Control Theory and
Computer Modelling (IJCTCM), ISSN: 1865-0929,
Vol. 2, No. 4 pp. 212-219.
King, M., 2010. Process Control: A Practical Approach,
Hanbook, Wiley, ISBN: 0470976661.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
178

Siroky, J., Oldewurtel, F., Cigler, J. Cigler, Prívara, S.,
2011. Experimental analysis of model predictive
control for an energy efficient building heating system,
Applied Energy 88 (9), pp. 3079-3087.
Prabhakara Rao, B., Voleti, D., 2011. A Novel Approach
of Designing Fuzzy Logic based Controller for Water
Temperature of Heat Exchanger Process Control,
International Journal of Advanced Engineering
Sciences and Technologies, Vol. 11, Issue 1, pp. 172 –
176.
Tala, A., Daxini, B., 2015. Identification of Heating
Process and Controlusing Dahlin PID with Smith
Predictor, International Journal of Engineering
Research & Technology (IJERT), Vol. 4, Issue 05, pp.
131–135.
García, P., Albertos, P., 2013. Robust tuning of a
generalized predictor-based controller for integrating
and unstable systems with long time delay, Journal of
Process Control, pp. 1205-1216.
Shi, D., Peng, G., Li, T., 2008. Gray predictive adaptive
Smith-PID control and its application, Proceedings of
International Conference on Machine Learning and
Cybernetics, Vol. 4, pp.1980 – 1984.
Dulău, M., Oltean, S., Duka, A., Gligor, A., 2010.
Behavioural study of a thermal process control under
uncertainties, IEEE International Conference on
Automation, Quality and Testing Robotics
(AQTR2010), Vol. I, pp. 198-201.
Hao. C., Zouaoui, Z., Zheng, C., 2011. A neuro-fuzzy
compensator based Smith predictive control for
FOPLDT process. Proceedings of International
Conference on Mechatronics and Automation (ICMA),
pp. 1833 – 1838.
Kato. M., Yamamoto, T., Fujisawa, S., 2005. A skill-based
PID controller using artificial neural networks,
Computational Intelligence for Modeling, Control and
Automation and International Conference on
Intelligent Agents, Web Technologies and Internet
Commerce, Vol. 1, pp. 702-707.
Xiaojing, Z., Schildbach, G., Sturzenegger, D., Morari,
M., 2013. Scenario based MPC for energy-efficient
building climate control under weather and occupancy
uncertainty. In Control Conference (ECC), pp. 1029–
1034.
Vidyamol, V., Nasar, A., 2015. Comparison between
Model Predictive Control and Smith Predictor with
PID Approach for Chamber Pressure in a Coke
Furnace, International Journal of Science and
Research (IJSR), Vol. 4, Issue 8, pp. 1148-1153.
Smith Predictor for Control of the Temperature Process with Long Dead Time
179
