
An Approach to Marker Detection in IR- and RGB-images for an
Augmented Reality Marker
Aaronkumar Ehambram, Patrick Hemme and Bernardo Wagner
1
Institute of Systems Engineering - Real Time Systems Group, Leibniz Universit
¨
at Hannover,
Appelstr. 9A, 30167 Hannover, Germany
Keywords:
Computer Vision, Augmented Reality, Kinect, Intel RealSense, Pose Estimation, Retroreflective Markers,
Sensor Fusion.
Abstract:
We introduce an augmented reality marker based on ArUco markers (Garrido-Jurado et al., 2014) that can be
detected in RGB- and IR-images by using retroreflective material. Due to active perception by IR-capable
camera systems the negative impact of external disturbances like change of light conditions on the marker
detection is minimized. By the parallel processing architecture of RGB- and IR-images redundancy stabilizes
the detection. As different retroreflective materials influence the image quality depending on the camera
system, we also examined different retroreflective materials and compared the performance of the Kinect V2
and the Intel RealSense D435 regarding the detection probability depending on the geometrical distance of the
augmented reality marker to the camera.
1 INTRODUCTION
Localization, pose estimation and mapping are some
of the most important tasks for autonomous systems.
Applications like autonomous robots (Sim and Lit-
tle, 2006) and unmanned vehicles (Broggi and Dick-
manns, 2000) are highly dependent on the reliability
of pose estimation tasks that can be solved effectively
by using cameras. Pose estimation algorithms that use
natural features such as keypoints and texture often
need significant computational requirements and are
subject to filter stability issues. Using artifical land-
marks reduces to a certain degree the need of com-
putational requirements due to specialized processing
steps that lead to an optimized extraction of the points
of interest. Additionally, the usage of artificial land-
marks enables us as users also to adapt the markers
to our needs. An improvement in pose estimation
based on artificial landmarks requires a very stable
and precise recognition of the markers. One way of
gaining stability and precision is redundancy. Many
robotic systems as described in (Fankhauser et al.,
2015) are equipped with cameras that provide in ad-
dition to monocular and stereo vision depth-images
and IR-images. Widely spread camera systems like
the Kinect (Zhang, 2012) and the Intel RealSense
(Draelos et al., 2015) use such technologies making
a huge bundle of sensor data available. The usage
of more than one sensor as a source of information
for recognition will lead to a more stable detection.
In this paper we suggest a new physical topology of
augmented reality markers based on ArUco markers
(Garrido-Jurado et al., 2014) that enable a detection in
the RGB- and IR-image by using retroreflective ma-
terials. Therefore, we examined two different retrore-
flective materials and evaluated their impact on the
image data provided by two different cameras - the
Kinect V2 and the Intel RealSense D435. In our eval-
uations we concentrate on the detection quality de-
pending on the distance of the markers to the cam-
era. The main contribution of this paper is the pro-
posal of an optical fiducial augmented reality marker
detection based on RGB- and IR-image data. In the
following we first discuss related works in Section 2,
then we present our suggested physical marker topol-
ogy based on the ArUco markers and shortly picture a
parallel architechture enabling the detection in RGB-
and IR-image in Section 3. In Section 4 we describe
our evaluation system and discuss the experimental
results and end with conclusions in Section 5.
2 RELATED WORK
In the literature several fiducial marker systems have
been proposed. Some of these are discussed in the
190
Ehambram, A., Hemme, P. and Wagner, B.
An Approach to Marker Detection in IR- and RGB-images for an Augmented Reality Marker.
DOI: 10.5220/0007810301900197
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 190-197
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

following in order to determine the goals of this pa-
per. Some approaches use planar circular markers
that encode the identification in circular sectors or in
concentric rings (Naimark and Foxlin, 2002). Due
to their primitive construction such markers usually
provide only one correspondence point located at the
center. That is why more than one marker is needed
for pose estimation. Motion Capture is a marker sys-
tem using retroreflective materials. The markers are
often spheres (Rossner, 2014) with a retroreflective
surface that can easily be used for segmentation in
the IR-image as described in (Dorfm
¨
uller and Wirth,
1998). The usage of such markers is very common
in Motion Capture because of the stability of the de-
tection. As special IR-cameras are used, the marker
system is optimally improved for the detection algo-
rithms. However the identification of the markers in-
volves a complex detection process obtained from the
relative marker positions. A very robust alternative
to the previously discussed approaches is a square-
based planar marker system. One of the most popular
square-based fiducial marker systems is ARToolKit
(Kato and Billinghurst, 1999). ARToolKit markers
are similarly composed to ArUco markers by a wide
black border with an inner image which is stored in a
database of valid patterns. Although ARToolKit was
extensively used the template matching approach for
marker identification leads to high false positive and
inter-marker confusion rates. Also the high sensitiv-
ity to changing light conditions due to fixed global
threshold to detect squares negatively influences the
detection algorithm. The ARTag system (Fiala, 2010)
is based on the same principal of square-based fidu-
cial systems using binary codes for identification. The
improvement of the ARTag system is established by
an edge-based square detection method that is more
robust to lighting and partial occlusion and by a bi-
nary coding scheme that includes checksum bits for
error detection and correction. Unfortunately the pro-
posed marker dictionary is fixed to 36 bits and the
maximum number of erroneous bits that can be cor-
rected is two. The ArUco library (Garrido-Jurado
et al., 2014) provides a stable marker detection based
on the ARToolKit and an algorithm for generating
configurable marker dictionaries following a criterion
to maximize the inter-marker distance and the number
of bit transitions. The detection is based on contour
extraction and polygone detection. The ArUco detec-
tion algorithm is used in our implementation due to
its accurate performance.
None of the marker systems that use planar markers
make use of special material for detection improve-
ment. As mentioned, on the one hand Motion Cap-
ture systems show a very reliable detection scheme of
the markers due to the use of retroreflective material
and IR-cameras. But on the other hand square-based
fiducial planar markers enable very robust and com-
pact artificial landmark detection methods in RGB-
images. That is why we fuse both marker topologies
to one novel marker topology based on ArUco mark-
ers that are able to be detected in RGB- and IR-image
data.
3 RGB- AND IR-IMAGE BASED
MARKER DETECTION
The marker detection proposed in this paper is based
on the ArUco marker detection presented in (Munoz-
Salinas, 2012) and (Garrido-Jurado et al., 2014). Our
proposed marker topology and the parallel processing
architecture are described in the following.
3.1 Enabling IR-image Marker
Detection
In order to use the ArUco detection algorithm with
IR-image data, it is necessary to change the physical
topology of the marker. While in the RGB-image the
colours and contrast of the used material and the light
conditions have the main impact on the image quality,
IR-images captured by active IR-cameras are highly
influenced by the reflection characteristics of the ma-
terial. The higher the reflection rate, the brighter the
corresponding spots appear in the image due to high
pixel values. Consequently, the usage of retroreflec-
tive material for the white bits on the marker leads to
the desired characteristics. As the black bits of the
markers are equipped with diffuse reflecting and the
white bits are coated with retroreflective material, the
necessary contrast between the white and black areas
in the IR-image is maintained leading to high gradi-
ents along the contours that have to be extracted. It
stabilizes the detection, since the whole detection al-
gorithm is based on the optimized gradient image.
3.2 Parallel Processing of RGB- and
IR-image
As the marker detection with retroreflective material
works with RGB- and IR-image data, it is expedi-
ent to use both data in order to stabilize the detection
through redundancy. In Figure 1 the ROS (Quigley
et al., 2009) based architecture of our fused detec-
tion is depicted which we describe in the following in
detail. In Figure 1 the involved nodes that represent
the processes that run simultaneously are marked with
An Approach to Marker Detection in IR- and RGB-images for an Augmented Reality Marker
191
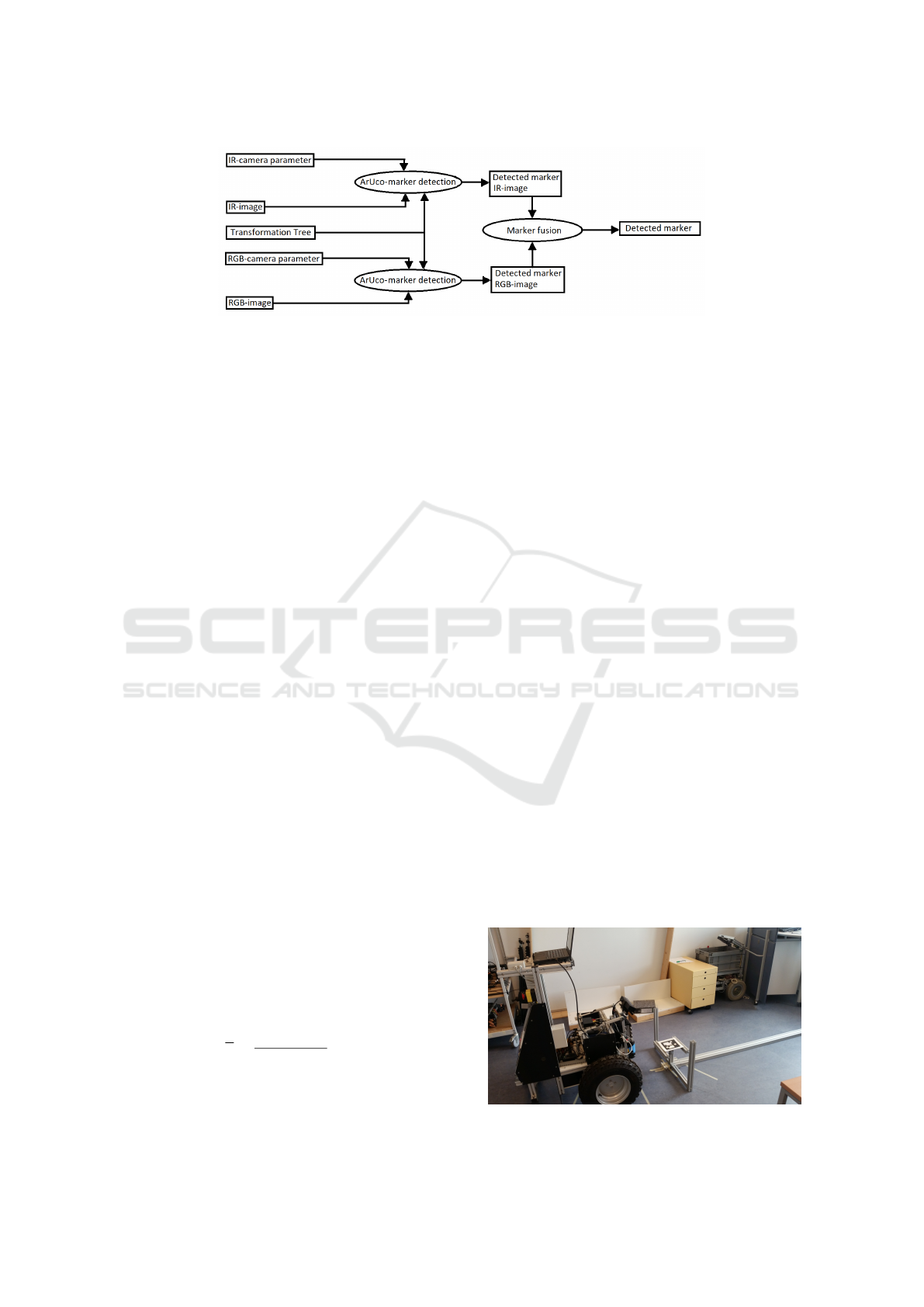
Figure 1: Fused marker detection from the RGB- and IR-image.
circular boundaries. The corresponding topics are
marked in rectangular boundaries. In total three nodes
are necessary for parallel processing of the RGB- and
IR-image: Two nodes process the ArUco-marker de-
tection. The one applies the detection algorithm on
the RGB-image and the other on the IR-image. For
the detection algorithm camera parameters, transfor-
mations and the image data have to be provided. The
output of the detection nodes are the detected marker
positions and their identification numbers. At this
point four different constellations are possible:
1. In both images no markers were detected.
2. In both images markers were detected.
3. Only in the RGB-image markers were detected.
4. Only in the IR-image markers were detected.
Regarding the first case, no further processing steps
are necessary. In the second case two marker posi-
tions for one corresponding marker in the scene are
published. Ideally, both published poses are equal.
But due to sensor inaccuracy and noise both poses
are not always equal. In order to calculate the correct
pose of the marker a further node is used, that fuses
the different marker poses. As RGB- and IR-cameras
have a similar detection accuracy when retroreflective
markers are used (see Section 4), neither the RGB-
nor the IR-camera based detection should be favored.
Consequently, the correct pose of the marker is calcu-
lated by averaging the published pose data of the cor-
responding markers. Accordingly if the RGB-image
based pose is described by
p
RGB
= (
x
RGB
y
RGB
z
RGB
α
RGB
β
RGB
γ
RGB
)
T
(1)
and the IR-image based pose is described by
p
IR
=
x
IR
y
IR
z
IR
α
IR
β
IR
γ
IR
T
(2)
the published pose data is
p =
p
RGB
+ p
IR
2
. (3)
The calculated pose is then published to the corre-
sponding topic. The third and the fourth case de-
scribe the situations in which the marker fusion node
subscribes to the detected marker topics but no corre-
spondences between both data can be determined. Be-
cause of the high true-positive accuracy of the ArUco
marker detection it is expedient to publish the de-
tected pose of the corresponding marker to the de-
tected marker topic.
4 EVALUATION
For evaluating the performance of the detection of the
marker presented in Section 3 we measured the de-
tection probability depending on the distance of the
marker. For sake of comparability and evaluation
of the degree of detection performance improvement
we also printed the ArUco marker on common white
printing paper. All markers have a border size of
15 cm. In order to perform a reproducible measure-
ment of the detection probability we built a measuring
system which is pictured in Figure 2. The marker is
fixed on a frame that is mounted on a linear rail sys-
tem. The angle of perspective in respect to the cam-
era system is variable. The camera angle in respect to
the normal vector of the floor was measured to 30
◦
.
In order to maintain comparability of the different
cameras, identical environmental conditions are nec-
essary. Therefore, both cameras are mounted on the
measuring system and the camera data is recorded in
parallel. In order to record the distance of the marker
the frame is equipped with two poles, that can be de-
tected by the laser scanner mounted on the measuring
Figure 2: Setup for measuring the detection probability.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
192

system with the cameras. The detection probability
is approximated by a sampling method. Therefore,
the length of 2.5 m of the linear rail system is quan-
tized into 10 cm steps. Each step represents a bin.
For generating the samples both cameras are run with
30 f ps while the frame of the rail system, on which
the markers are mounted, is slowly moved back and
forth varying the distance between marker and cam-
eras. As the distance is tracked by the laser scan data
during the whole experiment the amount of catured
frames F
captured,i
, the amount of frames in which the
markers are detected F
detected,i
and the corresponding
distance d
i
can be assigned to each bin B
i
. Conse-
quently, B
i
can be described by
B
i
= {F
captured,i
, F
detected,i
, d
i
}. (4)
The detection probability p
i
(B
i
) for each bin B
i
can be
approximated by dividing the amount of the frames
in which the markers are detected by the number of
captured frames according to equation 5
p
i
(B
i
) =
F
detected,i
F
captured,i
. (5)
Three different parameters have strong influence on
the detection probability measurement depending on
the distance:
1. The markers tilt angle changes the reflection be-
haviour of the materials.
2. The different retroreflective materials lead to dif-
ferent detection performances.
3. The cameras show different behaviours and pro-
vide very different images.
For investigating the influence of the tilt angle three
different angles were chosen for the experiments that
are explained in Subsection 4.1 in more detail. We
used two different retroreflective materials for the ex-
periments that have different reflection characteris-
tics. For better comparability paper printed ArUco-
markers are tested additionally. For reader con-
venience we want to introduce the terms Retro 1
and Retro 2 for the different retroreflective materi-
als. As such retroreflective materials are used in road
construction the reflectance characteristics are deter-
mined by technical regulations. The following men-
tioned technical reflectance data are based on the ger-
man regulations ”Richtlinien fuer die Sicherung von
Arbeitsstellen an Strassen” - in short RSA (Schoen-
born and Schulte, 1995). Retro 1 is a microprisms
based material that leads to higher reflectance values
than foils with glass bead construction, which results
in better viewing of microprismatic signs in the dark.
The Retro 1 material is a foil that is constructed with
a 3M pattern and C construction type. The reflectance
behaviour can be assigned to the reflectance class
RA1 according to (Schoenborn and Schulte, 1995).
Retro 2 is a material with encapsulated catadioptric
acting glass beads, which are partially embedded in
a plastic layer. The Retro 2 material is a foil that
is constructed with a 3M pattern and B construction
type. The reflectance behaviour can be assigned to
the reflectance class RA2 according to (Schoenborn
and Schulte, 1995). In our experimental investiga-
tions we used the Kinect V2 camera and the Intel
RealSense D435. While the Intel RealSense D435
shows economical benefits the used infrared projec-
tor uses structured-light that negatively influences the
marker detection in the IR-image. Due to the time-of-
flight technology of the Kinect and the homogenous
infrared projection the IR-image data provided by the
Kinect leads to an improved detection behaviour. But
the time-of-flight technology enables only the percep-
tion of infrared light that has the particular frequency
modulation that matches the emitter frequency. Con-
sequently, the Kinect does only percept the infrared
light that it projects with its emitter into the scene. In
contrast the Intel RealSense D435 also percepts the
surrounding infrared light enabling the usage of ex-
ternal light projectors. Although the Intel RealSense
D435 is more flexible external disturbances by IR-
emitters may lead to unwanted noise. In the following
the experimental results will be presented in detail.
4.1 Markers Tilt Angle
In order to measure the influence of the tilt angle the
different markers are mounted on the frame that is
shown in Figure 2. For each marker both cameras
are used for detecting the markers. Since the angle
of perspective of the cameras in respect to the normal
vector of the floor was measured to 30
◦
the markers
tilt angle is set to 0
◦
, 15
◦
and 30
◦
in respect to the
tangent vector of the floor level. Due to very similar
results of the 18 experiments (3 markers times 2 cam-
eras times 3 tilt angles) only one parameter constella-
tion will be discussed in the following. The diagram
portrayed in Figure 3 shows the results of the tilt angle
experiments for the Kinect and the Retro 1 marker.
The abscissa measures the horizontal distance of the
marker to the Kinect camera and the ordinate shows
the detection probability determined according to the
method described in Section 4. As the IR- and RGB-
images are captured synchronously the frame counter
is increased if both data are received. A frame is
marked as a detected frame if either in the IR- or in
the RGB-image markers are found as decribed in Sec-
tion 3.1. The results of three different experiments are
integrated into the plot 3. The red graph corresponds
An Approach to Marker Detection in IR- and RGB-images for an Augmented Reality Marker
193

Figure 3: Detection probability depending on the tilt angle
of marker Retro 1 for the Kinect.
to the detection probability for a tilt angle of 0
◦
, the
green graph to 15
◦
and the black graph to 30
◦
. Ac-
cording to the plot 3 the marker detection shows the
best performance with a tilt angle of 30
◦
. While the
detection with a tilt angle of 30
◦
has 100 % accuracy
till a distance of 2.4 m the 100 % detection probabilty
for 15
◦
is beneath 1.5 m and for 0
◦
beneath 0.75 m. As
for all experiments the tilt angle of 30
◦
shows the best
performance we fix the parameter to 30
◦
for further
discussion.
4.2 Retroreflective Materials and
Cameras
For determining the best camera-material-
constallation providing the best performance in
respect to the marker detection we want to present the
experimental results to the investigations to the dif-
ferent marker materials and cameras. Therefore, two
different environmental conditions are considered
in detail. While diffused daylight 4.2.1 disturbs the
IR-camera of the Intel RealSense D435 as described
in Section 4 and reflection negatively influences the
RGB-image data the experiments in an underexposed
room in Section 4.2.2 stress the benefits of using
IR-camera data and show the behavior of the different
retroreflective materials in respect to the cameras.
4.2.1 Diffused Daylight
The experimental results shown in Table 1 and 2 were
recorded during diffused daylight conditions. While
the Table 1 shows the detection probability of the dif-
ferent camera-material-constellations, Table 2 shows
snapshots of the markers captured by the respective
cameras. Each cell of the chart 1 is made of similar
diagrams: The abscissa measures the horizontal dis-
tance of the marker to the respective camera and the
ordinate shows the detection probability determined
according to the method described in Section 4. The
green graph describes the detection probability of the
markers based on the RGB-image, the black graph
refers to the IR-image and the red graph shows the de-
tection probability when both frames are parallel con-
sidered as mentioned in Section 3.1. The RGB-image
based marker detection with the Kinect is according
to Table 1 independent of the material. This fact is
also depicted in Table 2. As all RGB-images have a
very similar appearance the edge based detection al-
gorithm performs very similar. In contrast, the IR-
image based marker detection performance strongly
depends on the marker material: While the ArUco-
marker printed on paper is detected very accurately
till a distance of 1.5 m, the Retro 1 marker is detected
till a distance of nearly 2.5 m though the detection is
not as accurate as with paper due to the lower detec-
tion probability. The Retro 2 marker has the worst
perfomance regarding IR-image based detection. The
very inaccurate detection is caused by the reflection
characteristics of the encapsulated catadioptric act-
ing glass beads. As pictured in Table 2 black spots
appear in the regions where the retroreflective mate-
rial is located and due to the inhomogene bright re-
gions the detection algorithm fails. Concerning the
results of the Kinect camera in respect to the merged
marker detection it is obvious that using the Retro
1
marker shows the most benefits due to the very accu-
rate RGB-image detection and the capability to detect
the marker in far distances based on the IR-image.
The Intel RealSense has similar detection results re-
garding the RGB-images. But in Table 2 we can see
that the detection probablilty based on RGB-images
is clipped to 0 % below a distance of 0.5 m. This be-
haviour is caused by the experimental setup due to
the differing position of the Intel RealSense in respect
to the Kinect. Besides the neglectable impact caused
by the setup the RGB-image based detection is sim-
ilarly accurate as with the Kinect. But the IR-image
based detection shows its best performance with pa-
per. Both retroreflective materials lead to poor results
with maximum distances of 1.2 m. The reason for
the described detection behaviour is shown in Table
2: Due to the structured-light technology of the Intel
RealSense surrounding infrared light is also percepted
by the camera. Consequently, the diffuse reflecting
paper appears in the IR-image accurately, leading to
good detection. But both retroreflective materials are
over illuminated, so that the inner structure can not
be extracted and the detection fails. Conclusively,
the Intel RealSense in combination with paper printed
ArUco markers has the best performance under the
diffused daylight conditions.
4.2.2 Underexposed Room
The experimental results of the detection probability
in a low illuminated room are described in the Tables
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
194

Table 1: Detection probability measurement results with diffused daylight.
Kinect Intel RealSense
paper
Retro 1
Retro 2
Table 2: Detection probability measurement pictures with diffused daylight.
Kinect RGB Kinect IR Intel RealSense
RGB
Intel RealSense
IR
paper
Retro 1
Retro 2
An Approach to Marker Detection in IR- and RGB-images for an Augmented Reality Marker
195

Table 3: Detection probability measurement results in an underexposed room.
Kinect Intel RealSense
paper
Retro 1
Retro 2
Table 4: Detection probability measurement pictures in an underexposed room.
Kinect RGB Kinect IR Intel RealSense
RGB
Intel RealSense
IR
paper
Retro 1
Retro 2
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
196

3 and 4. The results of the Intel RealSense reveal that
in no frames markers were detected. The reason for
the very poor detection performance based on the data
provided by the Intel RealSense can be seen in Table
4: Due to the reduced illumination in the room also
the infrared light by external emitters is reduced, so
that the structured-light dominates in the IR-images.
That is the reason why the markers are pictured with
bright dots. As the detection algorithm is based on
the gradient image, the necessary edges for extracting
the marker are not calculated appropriately. Accord-
ing to the expectations the RGB-image based detec-
tion does not work fine with low illumination. But
interestingly the Kinect still detects the markers since
a small light emitter was placed in the room. Conse-
quently, the exposure adjustment of the Kinect sup-
ports the marker detection. The Kinect shows a rea-
sonable performance with the Retro 1 marker regard-
ing the IR-image. The detection behaviour with IR-
images of the paper printed marker in the underex-
posed room is similar to the results described in Table
1. The detection of the Retro 2 marker is due to the
already explained effects of the reflectance not accu-
rate.
Conclusively the best marker detection performance
can be achieved with the Kinect camera and the
Retro 1 marker. Due to the very accurate detection
with daylight and the reasonable behaviour on the IR-
image data a parallel detection in both images and a
following merging step stabilizes the detection due to
redundancy.
5 CONCLUSION
We presented an augmented reality marker based on
ArUco markers that can be detected in RGB- and
IR-images. The usage of retroreflective material im-
proves the marker detection in IR-images remarkably.
Due to active perception by IR-capable camera sys-
tems the negative impact of external disturbances like
change of light conditions on the marker detection is
minimized. As different retroreflective materials in-
fluence the image quality depending on the camera
system, we also examined two different retroreflec-
tive materials and compared the performance of the
Kinect V2 and the Intel RealSense D435 regarding
the detection probability depending on the distance of
the augmented reality marker to the camera. Accord-
ing to our results the Kinect together with the micro-
prisms based material for the markers shows the best
detection performance. Since the marker detection is
parallel processed on the IR- and RGB-image, it is
stabilized due to redundant sensor fusion.
REFERENCES
Broggi, A. and Dickmanns, E. D. (2000). Applications of
computer vision to intelligent vehicles. Image and Vi-
sion Computing, 5(18):365–366.
Dorfm
¨
uller, K. and Wirth, H. (1998). Real-time hand
and head tracking for virtual environments using in-
frared beacons. In Modelling and Motion Capture
Techniques for Virtual Environments, pages 113–127.
Springer.
Draelos, M., Qiu, Q., Bronstein, A. M., and Sapiro, G.
(2015). Intel realsense= real low cost gaze. In ICIP,
pages 2520–2524.
Fankhauser, P., Bloesch, M., Rodriguez, D., Kaestner, R.,
Hutter, M., and Siegwart, R. Y. (2015). Kinect v2 for
mobile robot navigation: Evaluation and modeling. In
2015 International Conference on Advanced Robotics
(ICAR), pages 388–394. IEEE.
Fiala, M. (2010). Designing highly reliable fiducial mark-
ers. IEEE Transactions on Pattern analysis and ma-
chine intelligence, 32(7):1317–1324.
Garrido-Jurado, S., Mu
˜
noz-Salinas, R., Madrid-Cuevas,
F. J., and Mar
´
ın-Jim
´
enez, M. J. (2014). Auto-
matic generation and detection of highly reliable fidu-
cial markers under occlusion. Pattern Recognition,
47(6):2280–2292.
Kato, H. and Billinghurst, M. (1999). Marker tracking
and hmd calibration for a video-based augmented re-
ality conferencing system. In Augmented Reality,
1999.(IWAR’99) Proceedings. 2nd IEEE and ACM In-
ternational Workshop on, pages 85–94. IEEE.
Munoz-Salinas, R. (2012). Aruco: a minimal library for
augmented reality applications based on opencv. Uni-
versidad de C
´
ordoba.
Naimark, L. and Foxlin, E. (2002). Circular data ma-
trix fiducial system and robust image processing for
a wearable vision-inertial self-tracker. In Proceedings
of the 1st International Symposium on Mixed and Aug-
mented Reality, page 27. IEEE Computer Society.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Rossner, H.-C. (2014). Retro-reflective marker. US Patent
8,915,599.
Schoenborn, D. and Schulte, W. (1995). RSA Handbuch-
sicherung von Arbeitsstellen an Strassen, Band 1:
RSA mit Kommentar.
Sim, R. and Little, J. J. (2006). Autonomous vision-based
exploration and mapping using hybrid maps and rao-
blackwellised particle filters. In Intelligent Robots and
Systems, 2006 IEEE/RSJ International Conference on,
pages 2082–2089. IEEE.
Zhang, Z. (2012). Microsoft kinect sensor and its effect.
IEEE multimedia, 19(2):4–10.
An Approach to Marker Detection in IR- and RGB-images for an Augmented Reality Marker
197
