
Seamless Development of Robotic Applications using Middleware and
Advanced Simulator
Burtin Gabriel
1
, Bonnin Patrick
2
and Malartre Florent
1
1
4D-Virtualiz, 10 Allee Evariste Galois, Clermont-Ferrand, France
2
LISV, Universite de Versailles St Quentin, 10-12 Avenue de l’Europe Velizy, France
Keywords:
Robotic Simulation, Real-time Simulator, Hardware In the Loop, Camera-lidar Sensor Fusion.
Abstract:
This paper addresses the issue of efficient transition from robotic simulation to field experiments and valida-
tion. The idea to ease this transition is to proceed step by step with small increments in complexity. A user
begins with a simple and not so realistic simulation and evolve slowly to a complex and realistic one. We
identified two axis to be tackled to achieve this steps by step complexity. The first axis is about the com-
munication with the sensors: each sensors have a specific protocol. A simple simulation can by-pass this
protocol by proposing a (universal) middleware connection while a complex one will emulate the real pro-
tocol to ensure a realistic data exchange between the processing unit and the sensor. The second axis is the
opportunity to emulate a large spectrum of simulation complexity for a given sensor/environment. To increase
the realism, similarly to the communication protocol, the realism of the sensor and its interactions with the
environment can be increased from simple to the most realistic. These concepts are tested with a real use-case:
the development of an indoor real-time localization system. The main development is done with a simulator
compliant with our requirements. Afterward, the code designed with simulation is tested with a real robot for
final validation.
1 INTRODUCTION
The use of simulation for robotics applications valida-
tion is a very actual topic with the rise of autonomous
cars and their authorization to roam free on our roads.
Using a simulator is an interesting option to reduce
the number of kilometers traveled with the real vehi-
cle. Before an autonomous car or robot hits the mar-
ket, several steps has to be overcome. While every-
thing begins with problems and ideas to solve them,
it appears that simulation is an interesting tool for
this matter. Indeed, researchers and companies need
tools to efficiently try out and prove ideas/theories to
be converted to industrial goods (Ivaldi et al., 2014).
Usually, both make use of simulator to reduce simul-
taneously duration and development costs. The use of
simulation can sound like a simple and easy improve-
ment but several issues arise when using simulation
to address a problem. Technological locks are block-
ing the smooth transition between simulated and real
world. The main locks are: seamless re-use of the
developed source code, complexity of the simulated
scenarios and pertinence of the simulation compared
to real-world.
First of all, we will define proposed features
needed for an advanced robotic simulator. Then we
will present a robotic related issue we solved using
simulator (Burtin et al., 2016) compliant with those
features. In the end, we will show and comment the
results obtained both in simulated and real environ-
ments with robots equipped with sensors. Finally, we
will conclude on the effectiveness of the presented
features for the developments of this robotic applica-
tion.
2 APPROACH
To develop a suitable simulation tool aiming at val-
idating a specific scientific concept, we previously
need to identify the steps involved in the develop-
ment of the concept. As seen in the figure 1, the loop
is the most time consuming step: we have to do an
unknown number of loops to improve incrementally
the solution and every loop needs experiments. This
experiment step can be done using simulation during
the early loops, and possibly until second to last be-
Gabriel, B., Patrick, B. and Florent, M.
Seamless Development of Robotic Applications using Middleware and Advanced Simulator.
DOI: 10.5220/0007831002390246
In Proceedings of the 9th Inter national Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2019), pages 239-246
ISBN: 978-989-758-381-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
239

fore the real world experiment (last loop). During
these loops, the goal is to increase the complexity and
solve issues alongside for an interesting conclusion
and possibly innovation.
Figure 1: Steps involved in the scientific method.
2.1 Universal Interface
The first time related issue with innovation is the du-
ration needed to perform the adaptation of the source
code between different simulation platforms (Stara-
nowicz and Mariottini, 2011). This transition usually
implies a radical change in programming language
and communication protocols with the simulated sen-
sors resulting in a new driver to implement. Some-
times, the source code has to be entirely re-written to
change the programming language (for example mat-
lab toward C/C++). ROS (Robotic Operating Sys-
tem), a robotic designed middleware allowed a much
more homogeneous format in data transfer and com-
munications: every data can be sent on the network
whatever is the original sensor and received by a ROS
node. Gazebo (Koenig and Howard, 2004) is an open-
source simulator developed within the ROS commu-
nity, it has a fully ROS compatible interface. How-
ever it still needs nevertheless somebody to develop
the ROS driver for the real sensor’s driver to be com-
patible with ROS when doing the transition to real
sensors. The researcher is prone to change its sim-
ulation platform to increase the complexity of the ex-
periment because all simulators have specific ranges
of realism. By making sure it has a full compatibility
with every middleware (Ardiyanto and Miura, 2012),
a simulator may not force the user to change its code
if he changes between middleware compatibles simu-
lation platforms. For example, V-REP (Rohmer et al.,
2013) is another ROS compatible simulator that al-
lows a ROS program to be tested with, even if it was
previously tested with Gazebo. During the final tests
of the code, developers has to take into account the
real sensor and the computation platform on which
the code will run. They will need to be able to get
rid of any middleware and take into account the real-
ity of the sensor and interface with it through the pri-
vate communication protocol. An advanced simula-
tion platform has to be able to emulate this crucial last
step, vital to be connected to the real sensor during
the real world experiment. In order to perform such
task, the simulator needs to be able to emulate the
data frame produced by the sensor and its firmware
and transmit it with the same physical support (Serial,
Ethernet, CAN bus). By doing so, the simulator pro-
pose an identical virtual twin for the algorithm to con-
nect to: if the driver is correctly implemented, he can
receive data from the real and virtual sensor without
being able to tell the difference and with no modifica-
tion of the source code.
2.2 Modular Complexity
Obviously, before testing a robot system in a full com-
plex environment, we proceed by incremental steps.
First of all, simple scenarios and if there are any suc-
cesses, the complexity can grow toward the final full
scale test. With the same idea, when starting with
a simulation platform, we need to start with a sim-
ple simulation and increase the complexity before the
transition to the real world experiments. Two choices
are available: every time we need higher complexity,
we change the simulation platform to have better re-
alism, or we use a simulator able to emulate a wide
range of complexities by itself. The second option
is preferable because in the case of the first one, the
time lost to transfer the code from a simulator to an-
other may be important, but the time lost to learn how
to use the new simulator and create the scenarios is
greater. Considering the second solution, the simu-
lation platform has to be able to produce sensor data
with adjustable realism which means that a single sen-
sors can be declined into several versions of increas-
ing complexity. For example, the most basic sensor
produces perfect measurement without noise/bias. A
more complex version includes a white noise and/or a
bias. The highest and most complex version would
mimic the measurement method of the real sensor,
producing a noise consistent with the environment
and the sensor. This way of thinking can also be ap-
plied to the environment itself to determine the sce-
nario complexity. For example, a basic scenery (mo-
tionless, simple shapes and monochromatic) won’t
produce the same results than a complex one (ani-
mated pedestrians, moving vehicles, realistic shapes
and photo-realistic textures). Besides the geometric
aspect, climate (snow, rain, shadows) can also prove
critical for the behaving of the application and its final
result.
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
240

3 ALGORITHM IMPLEMENTED
In order to test the impact of the simulation, we
have developed a localization method from scratch for
man-made indoor robot navigation.
An important hypothesis in our use-case is the fact
that the robot is evolving in a man-made environment,
comparable to an industry (factory) or office/hospital
type. We state that the robot will encounter numer-
ous structured elements with strong vertical and hori-
zontal lines. Considering a flat floor, we also assume
that the movement is only 2D. With this new assump-
tion and the previous one, we can narrow features to
propose a sparse localization method using specific
landmarks. The most invariant observable elements
in the image, as explained before, are going to be the
vertical lines. 3D horizontal and other more random
lines would have an incidence angle due to the point
of view of the camera and wouldn’t be invariant in the
image, thus inducing more computation to detect and
track them.
Using segments to perform SLAM (Simultaneous
Localisation And Mapping) processing have been ex-
plored either with a lone lidar (Choi et al., 2008) or
camera alone (Zuo et al., 2017). SLAMs are gener-
ally split between sparse and dense vision algorithms.
Sparse SLAMs are using only a few salient features
in the image to compute the localization, for exam-
ple the ORB-SLAM (Mur-Artal et al., 2015). Each
feature is represented and stored specifically in the
map to be used later as reference in the localization
algorithm. These types of process only need a small
percentage of the pixels from the entire image to be
tracked, while dense methods use almost all the pix-
els. Because dense methods such as DTAM (Dense
Tracking And Mapping)(Newcombe et al., 2011) use
every pixels from the image, users need a powerful
hardware to perform all the operations in real-time.
Most of the time, GPU processing is used to im-
prove the computation speed. RGB-D (Kinect, Xtion)
and depth camera sensors brought new SLAMs sys-
tems (Schramm et al., 2018), with new approaches.
They avoid the issue of initialization from unknown
range for the features. Monocular cameras have the
weakness to be unable, using only one frame, to ob-
tain the distance between an object and the camera
for its given pixel in the image (scale factor). LSD
(Von Gioi et al., 2012) is massively used by monoc-
ular and stereo-vision SLAMs systems (Engel et al.,
2014) or (Pumarola et al., 2017) but this line segment
detector is too generic and extracts all segments avail-
able while processing only B&W images: the pro-
cess is not optimized enough. Moreover, the RGB to
B&W conversion is a potential danger of missing gra-
dients because of the gray level conversion method.
The idea to use both lidar and monocular camera has
been more usually applied to mobile objects detec-
tion and tracking (Asvadi et al., 2016) but more rarely
to localization itself. In our case, we will focus on
the detection of vertical lines in the camera because
they are commonly found and invariant regarding our
environment. The common slam, using these types
of features are commonly referred as ”bearing” only
slam (Bekris et al., 2006), they are proven effective
in minimalist set-ups with simple environments (Zuo
et al., 2017).
In order to extract these vertical segments in the
image (which are supposed to be the projection of 3D
vertical structures of the scene: doors, angles of corri-
dors), we are looking for classical edge segmentation
composed of well known steps (Nachar et al., 2014):
gradient computation, thinning, closing, linking, and
polygonal approximation.
The localization process is an optimized parallel
pipeline able to cross data from the lidar and camera
sensors (Figure: 2). Each data process is split, but
synchronous to use both extracted data at the same
moment during the feature extraction stage. The ob-
jective is to detect a feature and determine its 3D po-
sition in the camera frame. The camera process ex-
tracts vertical lines in the image while the lidar pro-
cess does a segmentation and a time-forward predic-
tion to match the camera’s data time-stamp.
Figure 2: System overview.
The lidar, placed horizontally on the robot, pro-
duces an horizontal plane with the successive dis-
tances measurements. Our lidar process produces,
through the lidar segmentation algorithm, a set of
lines representing the environment around our robot.
The camera, located above the lidar, through the lines
detection algorithm, extracts a set of vertical lines in
the focal plane of the image. The fusion of both of
these data gives us a set of 3D points in the camera
frame (Figure: 3).
Seamless Development of Robotic Applications using Middleware and Advanced Simulator
241
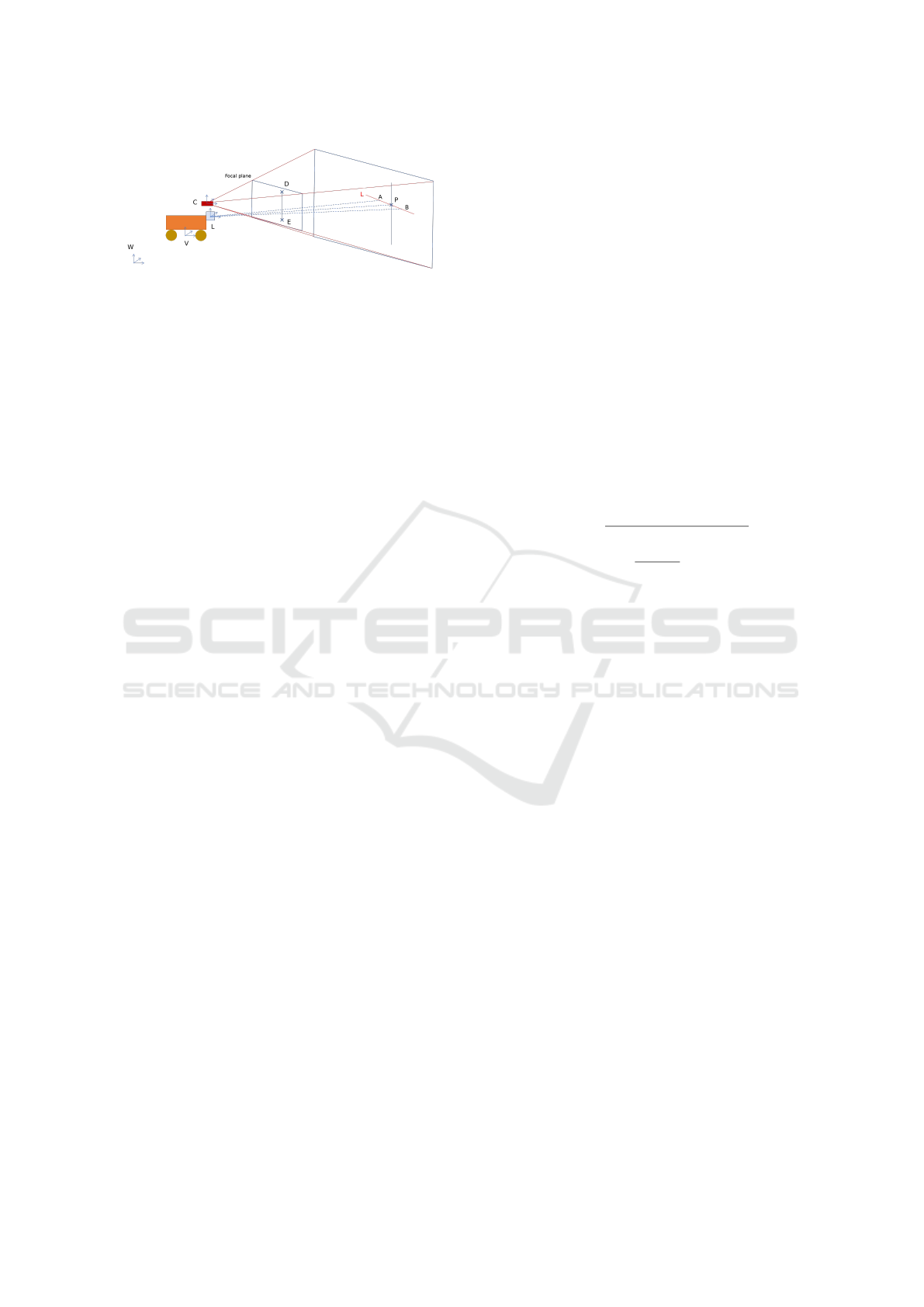
Figure 3: Feature (P) detected in the focal and lidar plane.
First we will see the optimized vertical lines de-
tection algorithm for images processing. Then we
will develop the 3D points extraction process using
the camera vertical features and the horizontal lines
from the lidar process. In the end, we will propose
a SLAM implementation using the extracted features
from the previous processes.
3.1 Lidar Process and Fusion
In this section, we will quickly explain the lines ex-
traction from lidar’s data and their fusion with fea-
tures previously extracted from the image.
In a former work, we applied Wall-Danielsson
to the lidar pointcloud (Burtin et al., 2018). This
method, originally used in the vision field, was found
to be efficient at segmenting lidar data very fast and
accurately.
Those lines computed previously in the polygonal
approximation exist in the 2D plane defined by the
lidar’s lasers. Therefore, we can compute the coordi-
nates of these lines in the camera frame with the ex-
trinsic parameters (homogeneous transformation ma-
trix between lidar and camera frames).
The image process provides us vertical lines in the
focal plane of the camera. We can compute from each
line a 3D plane (CDE) (cf. Figure: 3) composed of
the line segment (DE) and the focal point of the cam-
era (C).
The objective is to compute the intersection be-
tween a 3D plane and a 3D line extracted from the
camera and lidar data. This solution is assured to be
unique and existing because (AB) is not coplanar nor
collinear with (CDE) plane.
It’s important to note that points A and B are pro-
jected in the camera frame at the exact moment the
image is taken. Because the lidar and camera have
different frame rates, data aren’t synchronized and are
generated at different moments.
To tackle this issue, we apply a rigid transforma-
tion, composed of two :
1. The prediction of the would-be lidar’s measure,
considering the current velocities and the time
step between the lidar and the camera data;
2. The rigid transformation between lidar and cam-
era frame;
3.2 Localization using a SLAM Method
The extracted features are 3D points, but with our hy-
pothesis of planar environment we can make a 2D as-
sumption. 3D features become 2D and we can define
them in the camera frame with cartesian (x
i
, y
i
) or po-
lar coordinates.
We decided to implement a SLAM system using
an extended Kalman filter (Kalman, 1960) with the
observations from both the camera and lidar using the
cartesian coordinates. The estimation of the state vec-
tor, including the 2D pose (x
k
, y
k
, α
k
) and the ”n” fea-
tures is 3 + 2 × n long:
X
k
= [x
k
, y
k
, α
k
, x
1
k
, y
1
k
, · · ·, x
n
k
, y
n
k
] (1)
and the measurement vector, issued by the features in
polar coordinates:
z
i
k
=
ρ
i
k
=
p
(x
i
k
− x
k
)
2
+ (y
i
k
− y
k
)
2
θ
i
k
= arctan(
y
i
k
− y
k
x
i
k
− x
k
) − α
k
(2)
Our evolution model estimates the pose of the robot at
the next step with the evolution function f taking
ˆ
X
k
,
the state vector, and
ˆ
u
k
, the command applied to the
robot, as parameters:
X
k+1
= f(X
k
, u
k
) + q
k
(3)
q
k
is a Gaussian, white noise with zero-mean, repre-
sentative of the evolution noise.
The four steps of the Kalman algorithm are: Pre-
diction, Observation, Innovation and Update.
4 VIRTUAL ENVIRONMENT
One of the sides objectives in developing this local-
ization method was the development, use and vali-
dation of an advanced robotic simulator. The con-
cerned simulator is 4DV-Sim, developed by the com-
pany 4D-Virtualiz. Its development was initiated by
two robotic PhD students (perception and command
fields), that needed a powerful and capable simula-
tor to speed up their work. At the end of their thesis,
they patented the simulator and created a company. It
has become a professional tool dedicated to real-time
robots simulation in an HIL (Hardware In the Loop)
manner. The aim of this simulator is to replicate very
accurately real environments, sensors and robots into
the virtual world, including shadows, textures, geo-
referencing, communication protocols, disturbances,
etc (Figure: 4).
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
242

(a) Real sensors
(b) Virtual sensors
Figure 4: Comparison of Camera, GPS ans LIDAR sensors
between real data and data produced with the 4DV-Sim sim-
ulator.
4.0.1 Universal Interface and Modular
Complexity
The simulator is designed to be able to connect in-
dependently to a middleware (ROS, RT-Maps, etc)
or the proprietary interface. In figure 5, we can see
on the left two configurations: on top, the Velodyne
system connected to a ROS interface, on the bottom,
it is connected to the proprietary interface. The re-
sults of the first set-up can be seen directly on Rviz,
ROS compatible viewer (top right). The results of
the second set-up can be displayed, either directly
with the Veloview, Velodyne viewer provided by the
company (bottom right), or go through the ROS node
”velodyne-pointcloud” to be converted to a regular
ROS message and seen again on Rviz. The same idea
is therefore applied to every real sensor (2D/3D LI-
DARs, IMU, Camera, Odometers, etc ) implemented
in the simulator: the end-user is able to use it either
with the middleware for preliminary tests or the real
protocol and drivers to prepare for the transition to the
real sensor.
Figure 5: Velodyne sensor with ROS and brand interface
seen on Rviz and Velodyne viewer.
This simulator offers sensors with diverse degrees
of realism: it was possible during early prototyping
to use a ”perfect” LIDAR, providing perfects mea-
sured ranges, without any measurement noise. Later,
when our algorithm obtained appropriate results, we
increased the complexity by adding random Gaussian
measurement noise. Finally, before field testing, we
experimented the algorithm with the virtual replica
of the real sensor.The virtual replica has exactly the
same characteristics than the real one: FOV, resolu-
tion, noise measurement, maximum range, frequency,
appearance and the communication protocol. In the
figure 6, we can observe several real sensors (top) and
their virtual replica. From left to right, we have a Mar-
lin camera, a HDL-64E Velodyne (3D lidar), a LD-
MRS Sick (multi-layer lidar) and an UTM-30LX-EW
Hokuyo (2D lidar).
The simulator is able to work in an HIL (hardware
in the loop) fashion which means that once the source
code is validated with the virtual platform, it can be
instantaneously carried to the real platform to be exe-
cuted without modifications.
Figure 6: Real and virtual sensors.
The use of a simulator also gives the opportunity
to have exact repeatability to compare the results, ac-
cess to ground truth and produce various datasets with
different environments and robot set-ups, advantages
we do not posses with experiments in real environ-
ment.
4.0.2 Robot Set-up
The simulated robot is a Dr. Robot Jaguar, virtu-
ally equipped with a URG-4LX Hokuyo lidar and a
640x480 global-shutter camera (pinhole model). The
simulated lidar has the same parameters than the real
URG-04LX (min angle, max angle, resolution, fre-
quency, etc.) and the noise added to the measures is
Gaussian distributed with parameters provided by the
factory data-sheet.
Figure 7: Simulated indoor environment containing the
robot (red circle) and command trajectory (yellow).
Seamless Development of Robotic Applications using Middleware and Advanced Simulator
243

(a) Simple
(b) Complex
Figure 8: Same environment, different complexity.
(a) Original image
(b) Features
Figure 9: Use of ROI and the 2D features results in the
SLAM map.
The environment we used is a replica of a real
American hospital (Figure: 7). All doors, doorways,
beds, hallways have the right scale and materials ef-
fects. In preliminary work, we used two different sets
of textures and lighting effects to improve gradually
the performance of the vision algorithm (Figure: 8) by
adding more complexity to the scenario, accordingly
to the previously explained method. We will focus the
results produced with the most realistic scenarios.
4.0.3 Localization
We implemented the vertical detector presented pre-
viously and added the lidar data to obtain our 3D fea-
tures. In order to reduce the computation time we
limited the number of detected vertical lines and nar-
rowed this to the lines around the horizon, we can ob-
serve the projection of the 3D extracted features from
the previous image in cooperation with the lidar us-
ing camera intrinsic and extrinsic parameters (Figure:
9b).
The average time needed to extract verticals in
a ROI is 1.6623ms. Using a sparse SLAM system
(even without multi-threading), we can reasonably
track enough features in real time to feed a localiza-
tion process.
We performed our experiments in the simulated
environment using the described robot and setup. The
final virtual result is displayed in the Figure: 10. The
blue stars are the extracted and tracked features. One
can recognize the shape of the building shown in top-
view from Figure: 7. The green track is the ground
truth given by the simulator. The blue track is the es-
timated localization using only the odometry of the
robot. We can notice the rapid drift of the odometry
during turns and it’s relative precision during forward
motion. The black track is the estimated position of
the robot using the kalman filter. The track is split
in two parts, the first part has a very precise local-
ization (an average 2cm error relatively to the ground
truth), then a diverging part. The final error is 0.3m
over a 40m trajectory. Blue stars are our observed
landmarks and red one are registered in the map cre-
ated. This conclude our virtual tests, considering that
further tests should be on a real robot to confirm the
results.
Figure 10: Localization results.
4.1 Real Experiments
Real experiment were conducted in the hallway of
a public building. We used a Kobuki TurtleBot2
platform with an Hokuyo 04LX and an Intel Re-
alsense D435 placed on the top of the robot. The Re-
alSense sensor is used only to provide a global shutter
640x480 image, we didn’t use the RGB-D feature be-
cause it did not provide depth information with suffi-
cient range and precision (the corner seen on the left
of the hallway is not seen at 3m). The environment
we experienced in is about 40m long, having several
patio doors with large panes, solid doors and shiny
floor.
The real environment brought additional complex-
ity to the sensors due to two facts: the large win-
dows panes and the floor that reflects the environment.
The first issue comes from the sun light that blinds
the LIDAR sensor depending on the intensity of the
rays. The second is brought by the clean plastic floor
that create ”false” verticals in the image by reflecting
lights on the ceiling and doors. The first issue was
solved by filtering the LIDAR data while the second
one was only a matter of ROI focusing to exclude mis-
leading verticals.
Our strong initial hypothesis, 2D movement and
camera-lidar rig coplanar to the floor, is reasonable:
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
244
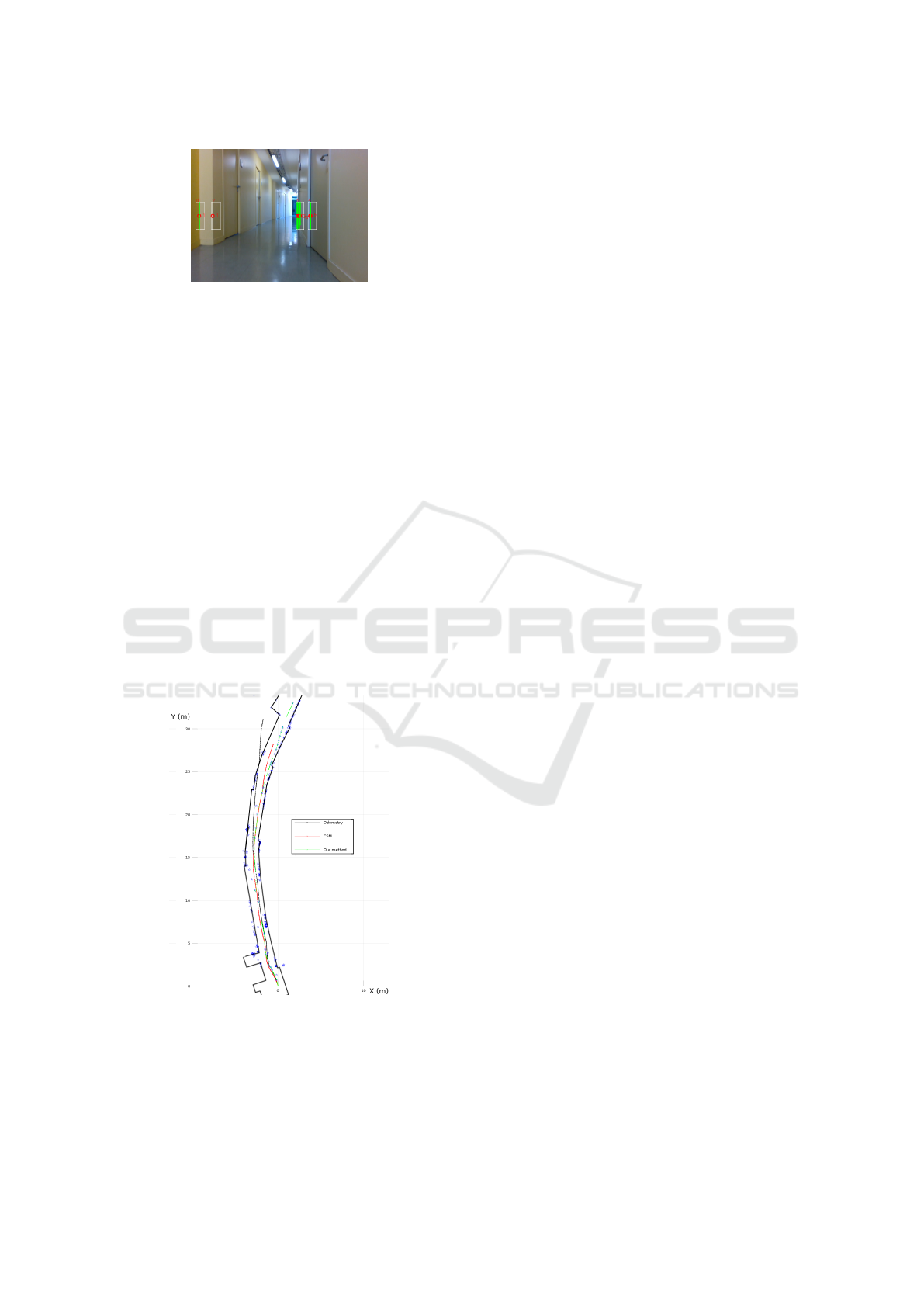
Figure 11: Detections with the real set-up.
even with small angular errors, we still manage to de-
tect vertical lines in our image.
As explained before, we do not have a proper
ground-truth available for real experiment, thus we
can’t know the exact position of the robot during the
experiment but we do have the 2D model of the build-
ing provided by the architects. This model have been
produced using precise (< 1cm) measurement by pro-
fessional surveyors, therefore, we can estimate the ef-
ficiency of the robot localization using the compari-
son between the landmarks registered by our system
and the solid shape given by exact model (black shape
in figure 12).
We compared the localization efficiency with an-
other method: the canonical scan matcher (CSM)
(Censi, 2008). We tried the ORB-Slam (Monocular)
but the complex light rendered the initialization im-
possible. Since there is no loop closing in this hall-
way, the CSM should not have particular disadvan-
tage.
Figure 12: Localization results.
On the figure 12, we can observe the results of
the different methods. The black trajectory is the lone
odometry. The red one is the CSM result. The Blue
stars are the landmarks registered by our method, and
the trajectory is green. The odometry is outside the
building frame but not that much, contrary to the vir-
tual odometry, this one is more precise. This can be
explained by the motion method of the robot: the vir-
tual is a 4 wheeled robot and the TurtleBot is a 2
wheeled. The later present a reduced slippery dur-
ing the turns, thus reducing the error on the odometry
that made the assumption of slip-free rolling condi-
tion. The low range of the LIDAR and narrow FOV
of the camera limits the number of landmarks avail-
able but the algorithm manages to detect several of
them and successfully tracked, even with a complex
lighting. The use of RGB-D sensors to combine the
image and depth with less calibration and more ac-
curate results is an interesting perspective with more
depth range.
5 CONCLUSIONS
In this paper, we proposed an idea of features an ad-
vanced robotic simulator would require. There are
two main features, beside the ability to provide real-
time simulation. The first is having multiple inter-
facing capacity to be used at first with a middleware
and then with the real sensor protocol. The second
would be the ability of the simulator to provide in-
creasing level of complexity to reduce the gap created
by the transition between simulation and reality. A
real accurate emulation of the sensor (measure, proto-
col, appearance) is a key to have a seamless transition.
We established a use case (robot navigation), built an
extended Kalman filter to provide fast robot localiza-
tion, re-using sensors data from others purposes. We
evaluated the interest in focused images processing
to reduce the computation time and observed a sig-
nificant improvement, enough to process all features
in real-time on a low grade computer. The early de-
velopments were done using the described simulator,
using ROS to simplify data exchanges and a growing
complexity of simulation. This increment have been
simultaneously focused on the sensor and the envi-
ronment realism to match the final test. Our last ex-
periment was performed with real robot and sensors
and we managed to connect to this set-up without any
modifications in our code. The algorithm worked ”out
of the box” with some parameters tuning and there-
fore, proves the interest in the proposed features.
ACKNOWLEDGMENT
This research was performed within the framework
of a CIFRE grant (ANRT) for the doctoral work of
G.Burtin at 4D-Virtualiz and LISV.
Seamless Development of Robotic Applications using Middleware and Advanced Simulator
245

REFERENCES
Ardiyanto, I. and Miura, J. (2012). Rt components for us-
ing morse realistic simulator for robotics. In The 13th
SICE System Integration Division Annual Conference,
pages 535–538.
Asvadi, A., Girao, P., Peixoto, P., and Nunes, U. (2016). 3d
object tracking using rgb and lidar data. In Intelligent
Transportation Systems (ITSC), 2016 IEEE 19th In-
ternational Conference on, pages 1255–1260. IEEE.
Bekris, K. E., Glick, M., and Kavraki, L. E. (2006). Evalu-
ation of algorithms for bearing-only slam. In Robotics
and Automation, 2006. ICRA 2006. Proceedings 2006
IEEE International Conference on, pages 1937–1943.
IEEE.
Burtin, G., Bonnin, P., and Malartre, F. (2018). Vision based
lidar segmentation for accelerated scan matching. In
Journal of Communications, volume 13, pages 139–
144.
Burtin, G., Malartre, F., and Chapuis, R. (2016). Reduc-
ing the implementation uncertainty using an advanced
robotic simulator.
Censi, A. (2008). An ICP variant using a point-to-line met-
ric. In Proceedings of the IEEE International Confer-
ence on Robotics and Automation (ICRA), Pasadena,
CA.
Choi, Y.-H., Lee, T.-K., and Oh, S.-Y. (2008). A line fea-
ture based slam with low grade range sensors using
geometric constraints and active exploration for mo-
bile robot. Autonomous Robots, 24(1):13–27.
Engel, J., Sch
¨
ops, T., and Cremers, D. (2014). Lsd-slam:
Large-scale direct monocular slam. In European Con-
ference on Computer Vision, pages 834–849. Springer.
Ivaldi, S., Padois, V., and Nori, F. (2014). Tools for dy-
namics simulation of robots: a survey based on user
feedback. arXiv preprint arXiv:1402.7050.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Transactions of the ASME–
Journal of Basic Engineering, 82(Series D):35–45.
Koenig, N. and Howard, A. (2004). Design and use
paradigms for gazebo, an open-source multi-robot
simulator. In 2004 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS)(IEEE
Cat. No. 04CH37566), volume 3, pages 2149–2154.
IEEE.
Mur-Artal, R., Montiel, J. M. M., and Tardos, J. D. (2015).
Orb-slam: a versatile and accurate monocular slam
system. IEEE Transactions on Robotics, 31(5):1147–
1163.
Nachar, R., Inaty, E., Bonnin, P., and Alayli, Y. (2014).
Polygonal approximation of an object contour by de-
tecting edge dominant corners using iterative corner
suppression. VISAPP International Conference on
Computer Vision Theory and Applications, pp 247-
256, Jan 2014, Lisbon, Portugal.
Newcombe, R. A., Lovegrove, S. J., and Davison, A. J.
(2011). Dtam: Dense tracking and mapping in real-
time. In Computer Vision (ICCV), 2011 IEEE Inter-
national Conference on, pages 2320–2327. IEEE.
Pumarola, A., Vakhitov, A., Agudo, A., Sanfeliu, A.,
and Moreno-Noguer, F. (2017). Pl-slam: Real-time
monocular visual slam with points and lines. In
Robotics and Automation (ICRA), 2017 IEEE Inter-
national Conference on, pages 4503–4508. IEEE.
Rohmer, E., Singh, S. P., and Freese, M. (2013). V-rep:
A versatile and scalable robot simulation framework.
In 2013 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 1321–1326. IEEE.
Schramm, S., Rangel, J., and Kroll, A. (2018). Data fusion
for 3d thermal imaging using depth and stereo camera
for robust self-localization. In Sensors Applications
Symposium (SAS), 2018 IEEE, pages 1–6. IEEE.
Staranowicz, A. and Mariottini, G. L. (2011). A survey and
comparison of commercial and open-source robotic
simulator software. In Proceedings of the 4th Interna-
tional Conference on PErvasive Technologies Related
to Assistive Environments, page 56. ACM.
Von Gioi, R. G., Jakubowicz, J., Morel, J.-M., and Randall,
G. (2012). Lsd: a line segment detector. Image Pro-
cessing On Line, 2:35–55.
Zuo, X., Xie, X., Liu, Y., and Huang, G. (2017). Robust vi-
sual slam with point and line features. arXiv preprint
arXiv:1711.08654.
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
246
