
Robust Finite-time Position and Attitude Tracking of a Quadrotor UAV
using Super-Twisting Control Algorithm with Linear Correction Terms
Yassine Kali
1
, Jorge Rodas
2
, Maarouf Saad
1
, Raul Gregor
2
, Walid Alqaisi
1
and Khalid Benjelloun
3
1
GR
´
EPCI Laboratory,
´
Ecole de Technologie Sup
´
erieure, Montreal, QC H3C 1K3, Canada
2
Laboratory of Power and Control Systems, Facultad de Ingenier
´
ıa, Universidad Nacional de Asunci
´
on, Paraguay
3
A2I Laboratory, Ecole Mohammadia d’Ing
´
enieurs, Mohammed V. University, Rabat, Morocco
Keywords:
Quadrotor, Unmanned Aerial Vehicle, Position and Attitude Tracking, Finite-time Convergence,
Super-Twisting Algorithm.
Abstract:
This work investigates the problem of finite-time position and attitude trajectory of quadrotor unmanned aerial
vehicle systems based on a modified second order sliding mode algorithm. The selected algorithm is a mod-
ified super-twisting with both nonlinear and linear correction terms. It ensures robustness against unknown
dynamics and perturbations and allows fast finite-time convergence even when the trajectories of the consid-
ered system are far from the user-chosen switching surface. In addition, this algorithm is very attractive since it
solves the major problems of the first and second order sliding mode, namely, the chattering phenomenon and
the required unavailable information for practical implementation. To show the effectiveness of the used mod-
ified structure of the super-twisting algorithm, simulation results are presented for the considered quadrotor
system.
1 INTRODUCTION
Sliding Mode Control (SMC) is known to be one
of the most effective and powerful robust nonlinear
techniques that attracts the community of automa-
tion researcher (Utkin et al., 1999). Indeed, SMC
is well known for its three good features: insensitiv-
ity to a class of uncertainties, simplicity and finite-
time convergence. This controller uses switching in-
put signals to force the trajectories of the system
to reach in finite-time the so-called sliding surface
and then to move throughout this latter towards the
equilibrium point. SMC has been tested in simu-
lation and in real time on different nonlinear sys-
tems such as power systems (Kali et al., 2018a; Kali
et al., 2019), robotic manipulator systems (Feng et al.,
2002; Kali et al., 2015) and underactuated systems
as Unmanned Aerial Vehicles (UAVs) (Runcharoon
and Srichatrapimuk, 2013). Nevertheless, its real-
time implementation suffers from the chattering phe-
nomenon (Boiko and Fridman, 2005) caused by high
switching signals. This phenomenon is the major dis-
advantage of SMC since it can cause several problems
as bad performances and the degradation or/and dete-
rioration of the moving mechanical parts.
In literature, several published works tried to re-
duce or eliminate this problem (Tseng and Chen,
2010; Lee et al., 2009; Kali et al., 2018b; Besnard
et al., 2012). The most effective method is the pro-
posed Second Order Sliding Mode (SOSM) (Levant,
2003). Unlike the discontinuous classical SMC, the
SOSM control signals that fed into the system are
continuous (Kali et al., 2017a; Kali et al., 2017b)
since the the switching signals act on the derivative
of the control inputs. However, its real-time imple-
mentation still limited due to the lack of required
informations (measurement of the derivative of the
selected sliding surface). This problem has been
solved by the proposition of the Super-Twisting Al-
gorithm (STA) (Benallegue et al., 2008; Gonz
´
alez-
Hern
´
andez et al., 2017b; Gonz
´
alez-Hern
´
andez et al.,
2017a; Ibarra and Castillo, 2017; Kali et al., 2018).
In this paper, the modified STA (structure with
nonlinear and linear terms) will be designed and
tested by simulations on a quadrotor UAV system.
The choice of UAVs belongs to the fact that to the au-
thors’ best knowledge, unlike the standard STA, this
modified structure has never been studied, and conse-
quently, used for UAV systems. Moreover, control of
flight robot systems is an attractive field of research
since the number of applications where these systems
are used keeps growing. Among the most developed
Kali, Y., Rodas, J., Saad, M., Gregor, R., Alqaisi, W. and Benjelloun, K.
Robust Finite-time Position and Attitude Tracking of a Quadrotor UAV using Super-Twisting Control Algorithm with Linear Correction Ter ms.
DOI: 10.5220/0007831202210228
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 221-228
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
221

applications, we cite exploration, construction, visual
inspection, transportation (Segales et al., 2016; Singh
and Frazier, 2018)... In addition, UAVs belong to
the class of nonlinear underactuated systems that suf-
fer from uncertainties due to the variation of the in-
ertia and mass that can happens during a transpora-
tion task (Yang and Xian, 2017) and external pertur-
bations due to environmental changes as wind (Cec-
carelli et al., 2007).
The rest of this article is organized as follows. In
Section 2, the mathematical model of the considered
quadrotor UAV system is described. In Section 3, the
used stucture of STA is studied for the position and
attitude tracking problem in the presence of uncer-
tainties. Simulation is conducted in Section 4 on the
considered system are provided to exhibit the effec-
tiveness of the used STA structure. The last section
concludes this article.
2 QUADROTOR UAV MODEL
AND PRELIMINARIES
The quadrotor UAVs are aerial robotic systems that
consist of four independent motors mounted on a rigid
cross structure as shown in Fig. 1.
Figure 1: Quadrotor structure, forces, angles and frames.
2.1 Position and Attitude Dynamical
Model
The mathematical model of most of the UAV sys-
tems is based on 6-Degrees Of Freedom (DOF)
[x,y,z,φ,θ, ψ]
T
∈ R
6
. This latter contains the posi-
tion vector [x,y,z]
T
∈ R
3
that includes the altitude z
and the attitude or Euler angles vector [φ,θ, ψ]
T
∈ R
3
with φ represents the roll, θ represents the pitch and
ψ represents the yaw.
On the one hand, the position dynamic model is
given as in (Wu et al., 2017) by:
¨x = −
k
f tx
m
˙x + (cos(ψ)sin(θ)cos(φ) + sin(ψ)sin(φ))
u
1
m
+ d
x
¨y = −
k
f ty
m
˙y + (sin(ψ)sin(θ)cos(φ) − cos(ψ)sin(φ))
u
1
m
+ d
y
¨z = −
k
f tz
m
˙z − g + cos(θ)cos(φ)
u
1
m
+ d
z
(1)
where k
f tx
, k
f ty
and k
f tz
are drag coefficients of trans-
lation, m denotes the quadrotor’s mass, g denotes the
constant of gravity, d
x
, d
y
and d
z
are uncertain func-
tions and u
1
is the vertical force.
On the other hand, the attitude dynamic model is
given as in (Wu et al., 2017) by:
¨
φ =
1
I
x
−k
f ax
˙
φ
2
+ (I
y
− I
z
)
˙
θ
˙
ψ − J
r
w
r
˙
θ + u
2
+ d
φ
¨
θ =
1
I
y
−k
f ay
˙
θ
2
+ (I
z
− I
x
)
˙
φ
˙
ψ + J
r
w
r
˙
φ + u
3
+ d
θ
¨
ψ =
1
I
z
−k
f az
˙
ψ
2
+ (I
x
− I
y
)
˙
φ
˙
θ + u
4
+ d
ψ
(2)
where u
2
, u
3
and u
4
are respectively the roll, pitch and
yaw torques, k
f ax
, k
f ay
and k
f az
are the coefficients of
the aerodynamic friction, I
x
, I
y
and I
z
denote the mo-
ments of inertia, J
r
denotes the motor inertia, d
φ
, d
θ
and d
ψ
are the uncertain functions and w
r
is the rotor
speed that is related to the torques by the following
equations:
u
1
= b(w
2
1
+ w
2
2
+ w
2
3
+ w
2
4
)
u
2
= b l(w
2
1
+ w
2
4
− w
2
2
− w
2
3
)
u
3
= b l(w
2
1
+ w
2
2
− w
2
3
− w
2
4
)
u
4
= c(w
2
1
+ w
2
3
− w
2
2
− w
2
4
)
w
r
= w
1
− w
2
+ w
3
− w
4
(3)
where c, b and l represent respectively the drag co-
efficient, the thrust coefficient and the length of the
moment arm.
2.2 Problem Formulation
As said before, the objective of this work is to de-
sign a robust nonlinear control technique that en-
sures a finite-time convergence of the 6-DOF vec-
tor [x, y,z,φ, θ,ψ]
T
of the quadrotor system to the de-
sired known trajectory vector [x
d
,y
d
,z
d
,φ
d
,θ
d
,ψ
d
]
T
despite the presence of uncertainties and perturba-
tions. In the subsequent section, the used controller
will be derived based on the following assumptions:
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
222

• Assumption 1: The vectors [x,y, z,φ,θ, ψ]
T
and
˙x, ˙y, ˙z,
˙
φ,
˙
θ,
˙
ψ
T
are available for measurements.
• Assumption 2: The reference vector
[x
d
,y
d
,z
d
,φ
d
,θ
d
,ψ
d
]
T
and its time deriva-
tives are known. Moreover, the desired Euler
angles are limited to:
|φ
d
| < π/2,
|θ
d
| < π/2,
|ψ
d
| < π.
• Assumption 3: The Euler angles are limited to:
|φ| < π/2,
|θ| < π/2,
|ψ| < π.
• Assumption 4: The first time derivative of uncer-
tain functions d
j
for j = x,y,z,φ, θ,ψ is bounded
such as:
|
˙
d
j
| ≤ δd
j
|
˙
d
j
| ≤ δd
1 j
+ δd
2 j
|S
j
|
where δd
j
is a positive constants, δd
1 j
is chosen to
be equal to δd
j
, δd
2 j
is an arbitrary chosen posi-
tive constant and |S
j
| is the selected switching sur-
face for each trajectory that will be given in the
design procedure.
3 MODIFIED SUPER-TWISTING
ALGORITHM
In this section, the used STA structure for the finite-
time both position and attitude trajectory tracking of
uncertain quadrotor UAV systems will be designed in
two steps. The first step consists on designing the
controller for the outer position loop while the sec-
ond step consists on generating the desired roll and
pitch angles and on designing the inner attitude loop.
3.1 Position Controller Design
The position dynamic model given in (1) can be
rewritten as follows:
¨
χ = [ ¨x, ¨y, ¨z]
T
= F(
˙
χ) +U
χ
+ d
χ
(4)
where F(
˙
χ) =
h
−
k
f tx
m
˙x,−
k
f ty
m
˙y,−
k
f tz
m
˙z
i
T
represents
the known dynamics, d
χ
= [d
x
,d
y
,d
z
]
T
represents the
vector of uncertainties and disturbances and U
χ
=
[u
x
,u
y
,u
z
]
T
with u
x
, u
y
and u
y
are virtual control in-
puts defined as follows:
u
x
=
1
m
(cos(ψ)sin(θ)cos(φ) + sin(ψ)sin(φ))u
1
u
y
=
1
m
(sin(ψ)sin(θ)cos(φ) − cos(ψ)sin(φ))u
1
u
z
= g −
1
m
cos(θ)cos(φ)u
1
(5)
Now, let us select the sliding surface as follows:
S
χ
= ˙e
χ
+ λ
χ
e
χ
=
˙
χ −
˙
χ
d
+ λ
χ
(χ − χ
d
)
(6)
where e
χ
∈ R
3
is the position tracking error vector
with χ
d
∈ R
3
is the vector of desired positions such
as χ
1d
= x
d
, χ
2d
= y
d
and χ
3d
= z
d
and λ
χ
is a diag-
onal matrix with strictly positive elements. The aim
of the SOSM is to ensure robustness, high precision
and lower chattering. To this end, the following STA
structure is selected:
˙
S
χ
= −M
1
|S
χ
|
0.5
sign(S
χ
) − M
2
S
χ
+ η
˙
η = −M
3
sign(S
χ
) − M
4
S
χ
(7)
where |S
χ
|
0.5
= diag
|S
1χ
|
0.5
,|S
2χ
|
0.5
,|S
3χ
|
0.5
, M
1
,
M
2
, M
3
and M
4
are (3 × 3) diagonal matrices
where the elements will be chosen to satisfy the
stability of the closed-loop system and sign(S
χ
) =
sign(S
1χ
),sign(S
2χ
),sign(S
3χ
)
T
with:
sign(S
iχ
) =
1, i f S
iχ
> 0
0, i f S
iχ
= 0
−1, i f S
iχ
< 0
f or i = 1,2, 3 (8)
Now, let us calculate
˙
S
χ
based on (6) and using the
nominal position dynamic model (4) as follows:
˙
S
χ
= ¨e
χ
+ λ
χ
˙e
χ
=
¨
χ −
¨
χ
d
+ λ
χ
˙e
χ
=F(
˙
χ) +U
χ
−
¨
χ
d
+ λ
χ
˙e
χ
(9)
Therefore, solving (7) using (9) gives the follow-
ing proposed improved super-twisting control algo-
rithm:
U
χ
= − F(
˙
χ) +
¨
χ
d
− λ
χ
˙e
χ
− M
1
|S
χ
|
0.5
sign(S
χ
)
− M
2
S
χ
− M
3
Z
t
0
sign(S
χ
)dt − M
4
Z
t
0
S
χ
dt
(10)
Finally, the total thrust u
1
can be obtained using
the following formula (Zhao et al., 2015):
u
1
= m
q
u
2
x
+ u
2
y
+ (u
z
− g)
2
(11)
Theorem 3.1. (Wang et al., 2018) Consider the po-
sition model of the quadrotor system given in (4), the
Robust Finite-time Position and Attitude Tracking of a Quadrotor UAV using Super-Twisting Control Algorithm with Linear Correction
Terms
223
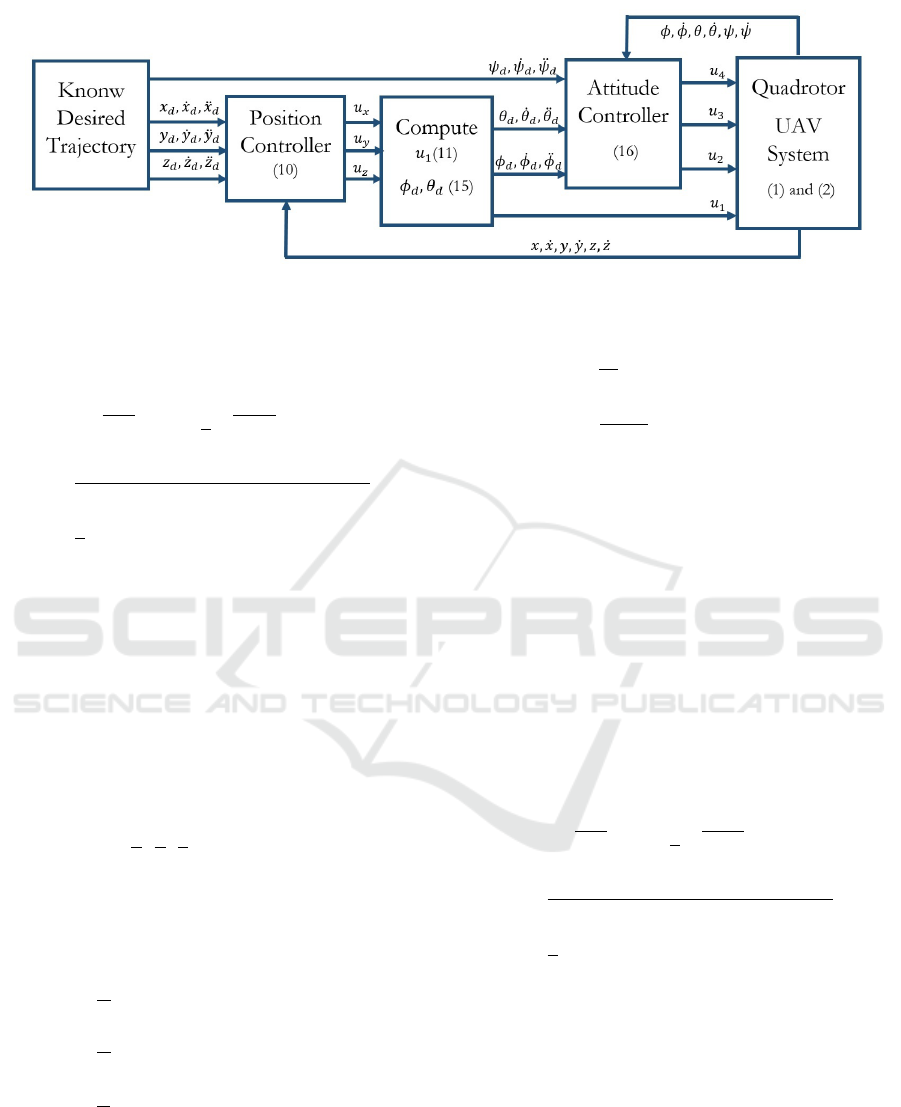
Figure 2: Block diagram of the closed-loop quadrotor UAV.
proposed controller in (11) ensures finite-time conver-
gence if the diagonal elements for i = 1,2, 3 of the
matrices M
1
, M
2
, M
3
and M
4
in (10) are chosen as
follows:
M
1i
> 2
p
δd
1i
, M
2i
>
1
2
p
2δd
2i
, M
3i
> δd
1i
,
M
4i
>
M
2
1i
(2M
2i
− δd
2i
) + v
i
5M
2
2i
+ 2δd
2i
2v
i
− M
2
1i
,
v
i
=
1
2
M
2
1i
+ M
3i
− δd
1i
(12)
Proof. Refer to (Wang et al., 2018).
3.2 Attitude Controller Design
The same methodology used for the position tracking
will be adopted in this part. First of all, let us rewrite
the attitude dynamical model given in (2) as follows:
¨
Θ = H(
˙
Θ) + GU
Θ
+ d
Θ
(13)
where Θ = [φ,θ,ψ]
T
represents the attitude state vec-
tor, G = diag
1
I
x
,
1
I
y
,
1
I
z
is the non-singular control
matrix, d
Θ
= [d
φ
,d
θ
,d
ψ
]
T
is the vector of uncer-
tainties and disturbances and U
Θ
= [u
2
,u
3
,u
4
]
T
and
H(
˙
Θ) = [H
1
(
˙
Θ),H
2
(
˙
Θ),H
3
(
˙
Θ)]
T
denotes the known
nonlinear dynamics with:
H
1
(
˙
Θ) =
1
I
x
−k
f ax
˙
φ
2
+ (I
y
− I
z
)
˙
θ
˙
ψ − J
r
w
r
˙
θ
H
2
(
˙
Θ) =
1
I
y
−k
f ay
˙
θ
2
+ (I
z
− I
x
)
˙
φ
˙
ψ + J
r
w
r
˙
φ
H
3
(
˙
Θ) =
1
I
z
−k
f az
˙
ψ
2
+ (I
x
− I
y
)
˙
φ
˙
θ
(14)
The objective of this part is to ensure the fast con-
verge to zero of the attitude tracking error e
Θ
=
Θ − Θ
d
where Θ
d
= [φ
d
,θ
d
,ψ
d
]
T
is the vector of the
known desired trajectories. Here, the desired roll
and pitch angles are generated from the virtual con-
trollers (Zhao et al., 2015) as follows:
φ
d
= arcsin
m
u
1
u
x
sin(Θ
3d
) − u
y
cos(Θ
3d
)
θ
d
= arctan
1
u
z
+ g
u
x
cos(Θ
3d
) + u
y
sin(Θ
3d
)
(15)
Theorem 3.2. (Wang et al., 2018) Consider the atti-
tude model of the quadrotor system given in (13), the
proposed control law is given by:
U
Θ
= − G
−1
H(
˙
Θ) −
¨
Θ
d
+ λ
Θ
˙e
Θ
+ ζ
− G
−1
N
1
|S
Θ
|
0.5
sign(S
Θ
) + N
2
S
Θ
ζ =
Z
t
0
N
3
sign(S
Θ
)dt + N
4
Z
t
0
S
Θ
dt
(16)
where S
Θ
= ˙e
Θ
+ λ
Θ
e
Θ
is the classical switching sur-
face with λ
Θ
∈ R
3×3
is a diagonal positive matrix.
Moreover, The above controller ensures finite-time
convergence if the gains of the diagonal positive ma-
trices N
1
, N
2
, N
3
and N
4
are chosen for i = 1, 2,3 as
follows:
N
1i
> 2
p
δd
1i
, N
2i
>
1
2
p
2δd
2i
, N
3i
> δd
1i
,
N
4i
>
N
2
1i
(2N
2i
− δd
2i
) + p
i
5N
2
2i
+ 2δd
2i
2p
i
− N
2
1i
,
p
i
=
1
2
N
2
1i
+ N
3i
− δd
1i
(17)
Proof. Refer to (Wang et al., 2018).
Finally, the architecture of the proposed control
system is represented in Fig. 2.
4 NUMERICAL SIMULATION
In this work, numerical simulation is performed us-
ing MATLAB/Simulink software to validate the used
improved super-twisting algorithm. The consid-
ered quadrotor is the parrot-rolling spider quadro-
tor (Mathworks, 2018) described by (1) and (2). The
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
224
used physical parameters given in Table 1 can be
found in (Mathworks, 2018).
Table 1: Physical parameters of the quadrotor UAV.
Parameter Value Unit
Mass, m 0.068 Kg
Moment of inertia, I
x
0.0686 10
−3
Kg.m
2
Moment of inertia, I
y
0.0920 10
−3
Kg.m
2
Moment of inertia, I
z
0.1366 10
−3
Kg.m
2
Motor inertia, J
r
1.0209 10
−7
Kg.m
2
Gravity, g 9.81 m/s
2
The simulation is performed such as the initial 6-
DOF vector is chosen to be [0,0,0,0, 0,0]. In addi-
tion, the desired scenario is given by choosing the fol-
lowing desired references:
x
d
(t) = 2 sin(0.5t) m
y
d
(t) = 2 cos(0.5t) m
z
d
(t) = 1 m
ψ
d
(t) = 0 rad
In addition, the disturbances are introduced at time
t = 8 s. The chosen profile for the disturbances on the
position is given for j = x,y, z by:
d
j
=
0, i f t < 8
0.5 sin(2πt), i f t ≥ 8
while the disturbances on the Euler angles are given
for j = φ,θ, ψ by:
d
j
=
0, i f t < 8
0.2 sin(2πt), i f t ≥ 8
Moreover, for this scenario, the chosen sliding sur-
face and improved super-twisting gains are given in
Table 2.
Table 2: Proposed controller gains.
Gains Value
λ
χ
= diag(λ
χ1
,λ
χ2
,λ
χ3
) diag(5,5,5)
M
1
= diag(M
11
,M
12
,M
13
) diag(7.5,7.5,7.5)
M
2
= diag(M
21
,M
22
,M
23
) diag(6,10,10)
M
3
= diag(M
31
,M
32
,M
33
) diag(6, 6,6)
M
4
= diag(M
41
,M
42
,M
43
) diag(3, 3,3)
λ
Θ
= diag(λ
Θ1
,λ
Θ2
,λ
Θ3
) diag(20,20,20)
N
1
= diag(N
11
,N
12
,N
13
) diag(5,7,10)
N
2
= diag(N
21
,N
22
,N
23
) diag(15,20,2)
N
3
= diag(N
31
,N
32
,N
33
) diag(4,5.5,5.5)
N
4
= diag(N
41
,N
42
,N
43
) diag(10,17,1)
The results obtained are given in figures 3-6. The
used nonlinear method ensures the high accuracy con-
vergence of the position and attitude trajectories to
their desired known references in finite-time as de-
picted in figures 3 and 4. These good performances
3
0
3
0.5
2
Z (m)
1
2
1.5
1
X (m)
1
Y (m)
0
0
-1
-1
-2
-2
Figure 3: Finite-time 3D tracking.
are due to the ability of the proposed controller to re-
ject the uncertain functions. Indeed, Fig. 5 confirms
the good results since all the tracking error values are
very small. Finally, Fig. 6 shows that the chattering
is reduced in the control torque inputs. Moreover, the
obtained values of the control torque inputs are in the
range of acceptable torques for the considered parrot-
rolling spider quadrotor system.
5 CONCLUSIONS
In this paper, the robust super-twisting control algo-
rithm with nonlinear and linear correction terms has
been designed and simulated on a quadrotor UAV for
finite-time position and attitude tracking in the pres-
ence of unknown dynamics and perturbations. The
chosen controller has never been used for underac-
tuated systems such as the considered aerial robotic
systems. Moreover, this algorithm allows fast finite-
time convergence, reduces chattering and rejects the
effects of the unmodelled and unknown dynamics and
unexpected perturbations. The simulation has been
carried out on parrot-rolling spider quadrotor. The re-
sults obtained showed good performances even in the
presence of uncertainties. Future works will be con-
ducted to implement in real-time the proposed con-
troller and to make the convergence time faster during
the sliding phase.
ACKNOWLEDGEMENTS
This work received support from the Paraguayan Sci-
ence and Technology National Council - CONACYT
(PINV15-0136).
REFERENCES
Benallegue, A., Mokhtari, A., and Fridman, L. (2008).
High-order sliding-mode observer for a quadrotor
UAV. International Journal of Robust and Nonlinear
Control, 18(4-5):427–440.
Robust Finite-time Position and Attitude Tracking of a Quadrotor UAV using Super-Twisting Control Algorithm with Linear Correction
Terms
225
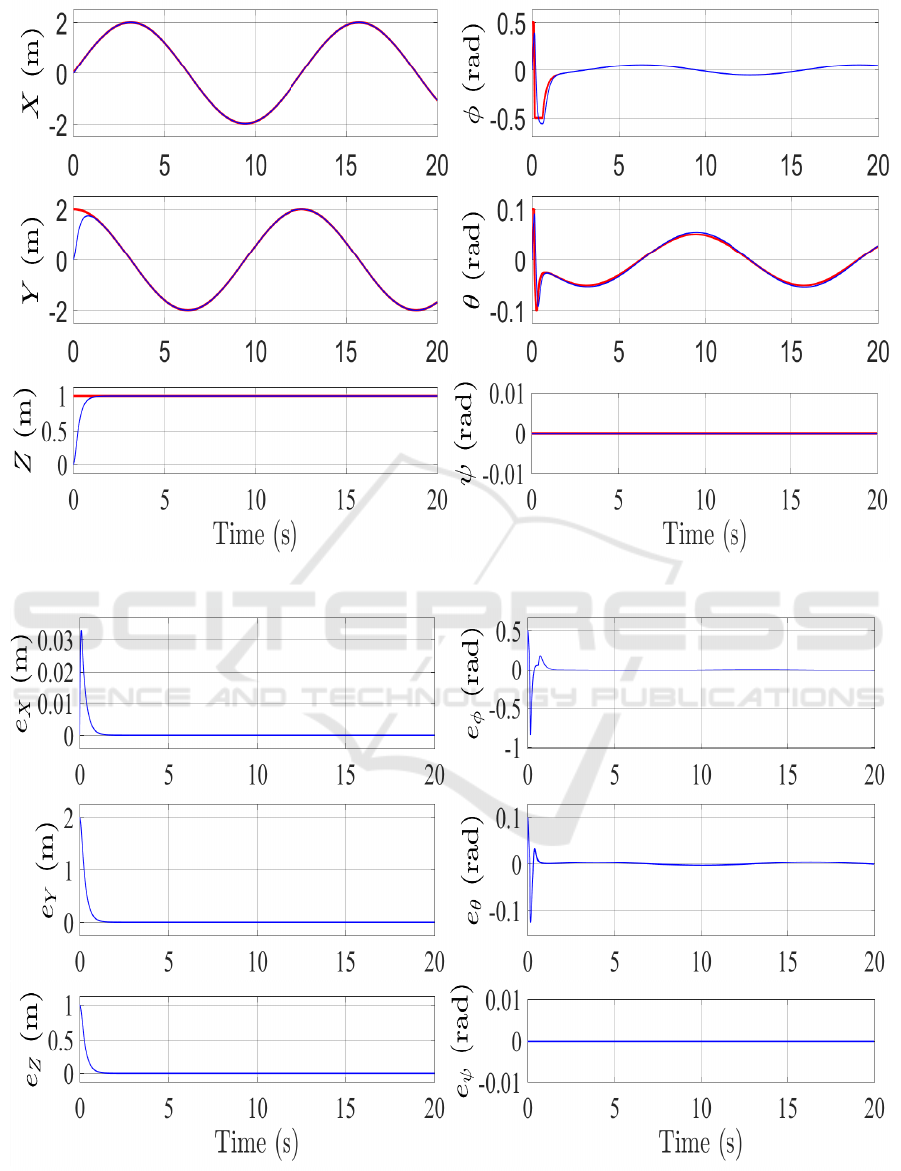
Figure 4: Finite-time position and attitude trajectory tracking.
Figure 5: Finite-time position and attitude tracking error.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
226
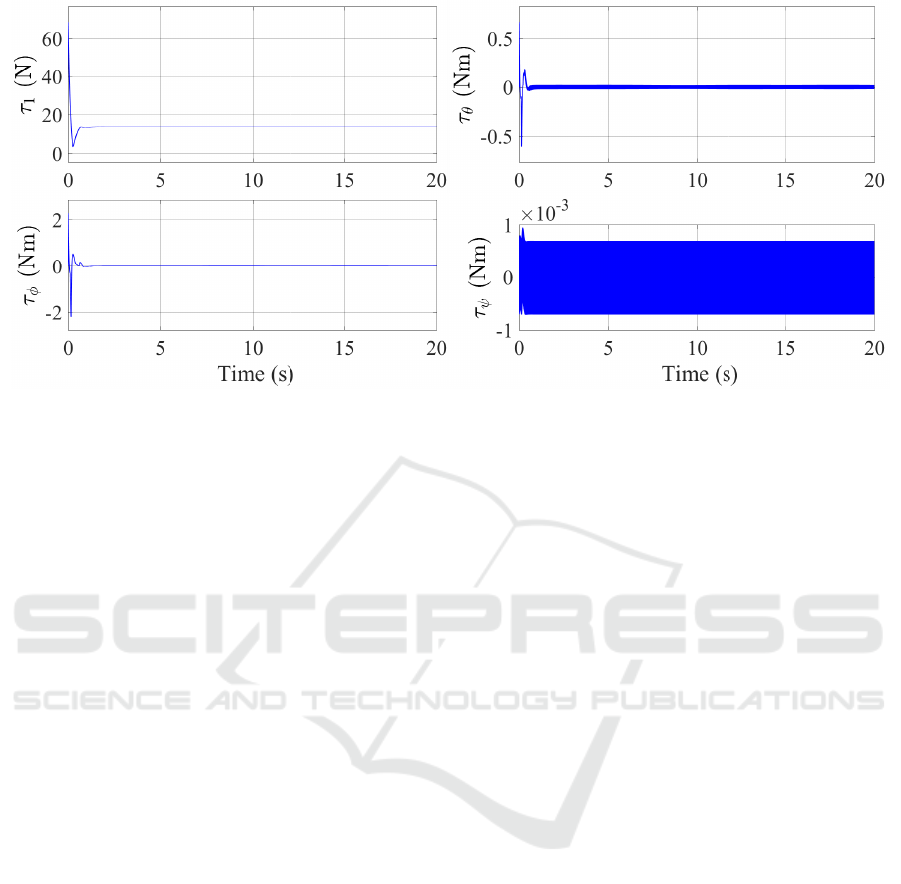
Figure 6: Computed control torque inputs.
Besnard, L., Shtessel, Y. B., and Landrum, B. (2012).
Quadrotor vehicle control via sliding mode controller
driven by sliding mode disturbance observer. Journal
of the Franklin Institute, 349(2):658 – 684.
Boiko, I. and Fridman, L. (2005). Analysis of chattering in
continuous sliding-mode controllers. IEEE Transac-
tions on Automatic Control, 50(9):1442–1446.
Ceccarelli, N., Enright, J. J., Frazzoli, E., Rasmussen, S. J.,
and Schumacher, C. J. (2007). Micro UAV path plan-
ning for reconnaissance in wind. In ACC, American
Control Conference, pages 5310–5315.
Feng, Y., Yu, X., and Man, Z. (2002). Non-singular terminal
sliding mode control of rigid manipulators. Automat-
ica, 38(12):2159 – 2167.
Gonz
´
alez-Hern
´
andez, I., Palacios, F. M., Cruz, S. S., Que-
sada, E. S. E., and Leal, R. L. (2017a). Real-time alti-
tude control for a quadrotor helicopter using a super-
twisting controller based on high-order sliding mode
observer. International Journal of Advanced Robotic
Systems, 14(1):1–15.
Gonz
´
alez-Hern
´
andez, I., Salazar, S., Munoz, F., and
Lozano, R. (2017b). Super-twisting control scheme
for a miniature quadrotor aircraft: Application to
trajectory-tracking problem. In ICUAS, International
Conference on Unmanned Aircraft Systems, pages
1547–1554.
Ibarra, E. and Castillo, P. (2017). Nonlinear super twisting
algorithm for UAV attitude stabilization. In ICUAS,
International Conference on Unmanned Aircraft Sys-
tems, pages 640–645.
Kali, Y., Ayala, M., Rodas, J., Saad, M., Doval-Gandoy, J.,
Gregor, R., and Benjelloun, K. (2019). Current con-
trol of a six-phase induction machine drive based on
discrete-time sliding mode with time delay estimation.
Energies, 12(1).
Kali, Y., Rodas, J., Ayala, M., Saad, M., Gregor, R., Benjel-
loun, K., Doval-Gandoy, J., and Goodwin, G. (2018a).
Discrete-time sliding mode with time delay estimation
of a six-phase induction motor drive. In IECON 2018
- 44th Annual Conference of the IEEE Industrial Elec-
tronics Society, pages 5807–5812.
Kali, Y., Rodas, J., Gregor, R., Saad, M., and Benjelloun,
K. (2018b). Attitude tracking of a tri-rotor uav based
on robust sliding mode with time delay estimation. In
2018 International Conference on Unmanned Aircraft
Systems (ICUAS), pages 346–351.
Kali, Y., Saad, M., and Benjelloun, K. (2017a). Non-
singular terminal second order sliding mode with time
delay estimation for uncertain robot manipulators. In
ICINCO, International Conference on Informatics in
Control, Automation and Robotics, pages 226–232.
Kali, Y., Saad, M., Benjelloun, K., and Benbrahim, M.
(2015). Sliding mode with time delay control for
mimo nonlinear systems with unknown dynamics. In
2015 International Workshop on Recent Advances in
Sliding Modes (RASM), pages 1–6.
Kali, Y., Saad, M., Benjelloun, K., and Fatemi, A. (2017b).
Discrete-time second order sliding mode with time de-
lay control for uncertain robot manipulators. Robotics
and Autonomous Systems, 94:53 – 60.
Kali, Y., Saad, M., Benjelloun, K., and Khairallah, C.
(2018). Super-twisting algorithm with time delay es-
timation for uncertain robot manipulators. Nonlinear
Dynamics, 93(2):557–569.
Lee, D., Jin Kim, H., and Sastry, S. (2009). Feedback
linearization vs. adaptive sliding mode control for a
quadrotor helicopter. International Journal of Con-
trol, Automation and Systems, 7(3):419–428.
Levant, A. (2003). Higher-order sliding modes, differentia-
tion and output-feedback control. International Jour-
nal of Control, 76(9-10):924–941.
Mathworks (2018). Parrot minidrones support
from simulink. https://www.mathworks.com/
hardware-support/parrot-minidrones.html.
Runcharoon, K. and Srichatrapimuk, V. (2013). Sliding
mode control of quadrotor. In TAEECE, International
Conference on Technological Advances in Electrical,
Robust Finite-time Position and Attitude Tracking of a Quadrotor UAV using Super-Twisting Control Algorithm with Linear Correction
Terms
227

Electronics and Computer Engineering, pages 552–
557.
Segales, A., Gregor, R., Rodas, J., Gregor, D., and Toledo,
S. (2016). Implementation of a low cost UAV for pho-
togrammetry measurement applications. In ICUAS,
International Conference on Unmanned Aircraft Sys-
tems, pages 926–932.
Singh, K. K. and Frazier, A. E. (2018). A meta-analysis and
review of unmanned aircraft system (UAS) imagery
for terrestrial applications. International Journal of
Remote Sensing, 0(0):1–21.
Tseng, M. and Chen, M. (2010). Chattering reduction of
sliding mode control by low-pass filtering the control
signal. Asian Journal of Control, 12(3):392–398.
Utkin, V., Guldner, J., and Shi, J. (1999). Sliding mode
control in electromechanical systems. Taylor-Francis.
Wang, Y., Yan, F., Chen, J., and Chen, B. (2018). Contin-
uous nonsingular fast terminal sliding mode control
of cable-driven manipulators with super-twisting al-
gorithm. IEEE Access, 6:49626–49636.
Wu, D., Du, H., and Zhu, W. (2017). Finite-time position
tracking control of a quadrotor aircraft. In 2017 36th
Chinese Control Conference (CCC), pages 737–742.
Yang, S. and Xian, B. (2017). Trajectory tracking control
design for the system of a quadrotor UAV with a sus-
pended payload. In CCC, Chinese Control Confer-
ence, pages 777–782.
Zhao, B., Xian, B., Zhang, Y., and Zhang, X. (2015). Non-
linear robust adaptive tracking control of a quadrotor
uav via immersion and invariance methodology. IEEE
Transactions on Industrial Electronics, 62(5):2891–
2902.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
228
