
Lines to Planes Registration
Ales Jelinek and Adam Ligocki
Central European Institute of Technology, Purkynova 123, Brno, Czech Republic
Keywords:
Line, Plane, Registration, Least Squares, Optimization, Rigid Transformation, Data Fitting.
Abstract:
This paper deals with the Line-Plane registration problem. First we introduce the matter of geometrical object
fitting and show the specificity of the Line-Plane combination. Then the method is derived to fulfil all usual
demands we put on a registration algorithm. Our algorithm works on any number of corresponding Line-Plane
pairs higher than three, providing more accurate results and better convergence, as this number gets higher.
Although the computation is non-linear by its nature, benefits of the least squares optimization were preserved.
The algorithm is divided into a linear part dependant on the amount of input data and a non-linear part, which
is not, keeping efficiency in case of large data sets. All important features were experimentally tested and
proved to work.
1 INTRODUCTION
Registration of two sets of geometrical objects is a
longly solved problem in multiple disciplines of sci-
ence and engineering. Finding an optimal transfor-
mation, which brings one set as close to the other as
possible is an underlying principle connecting robotic
mapping (Cadena et al., 2016), object recognition
(Grimson and Lozano-P
´
erez, 1984), pose determina-
tion (Markley and Mortari, 2000) and other related
tasks. There is not a single type of transformation
to be discussed and neither a definition of ”close-
ness” is universal. Moreover, the geometrical objects
may vary in their nature (points, lines, planes, vec-
tors and rigid bodies to name the most common) and
there might not even be the same kind objects in both
sets. Another defining difference is, whether we know
which objects from both sets correspond with each
other, or not.
All this diversity leads to a large number of ap-
proaches developed over the last decades (Cadena
et al., 2016), (Pomerleau et al., 2015), (Tam et al.,
2013). We are going to focus on rigid transformation
and known correspondences. There is plenty of algo-
rithms for registration problem with points in at least
one of the data sets (Wientapper and Kuijper, 2017),
(Olsson et al., 2006), (Ramalingam et al., 2010). The
Line-Line (Li et al., 2016) and Plane-Plane (Forstner
and Khoshelham, 2017) problem is addressed much
less, but we can still find relevant literature. Surpris-
ingly, the Line-Plane problem draw minimal attention
over time and we were able to locate a single paper
(Chen, 1991) with working, yet somewhat unwieldy
algorithm.
In many practical situations, the lines are just ap-
proximations computed from point-like data, so the
Line-Plane task can be easily converted into a Point-
Plane equivalent. Though it is a viable option, stor-
ing point-like data might get very memory demanding
and sometimes these data do not exist at all. If extra
memory requirements are impractical, extra sampling
of lines to obtain points is terribly inefficient. Lin-
ear and planar approximations can be used for further
processing (Cadena et al., 2016) while point-based
methods provide no additional value. Becoming inde-
pendent on points by direct solution of the Line-Plane
problem is therefore a useful addition to the state of
the art of the registration algorithms. This paper aims
to provide an alternative to (Chen, 1991) with more
favorable properties listed below:
• Our algorithm works on any number of corre-
sponding pairs N ≥ 3 in contrast to (Chen, 1991)
which needs exactly N = 3.
• The algorithm consists of two stages: I. Simple
linear computation with O(N) complexity (pro-
portional to the number of correspondences) and
II: Non-linear optimization independent on N.
• Addition and removal of a single correspondence
from the sets results in a constant time operation
on results precomputed in the first stage.
• Initial guess to speed up the second stage can be
Jelinek, A. and Ligocki, A.
Lines to Planes Registration.
DOI: 10.5220/0007834906250632
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 625-632
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
625

supplied.
• Provides metric directly describing quality of the
registration.
• Works for general planes and lines in 3D as well
as for general planes and lines lying in a single
plane (the case of line laser scanning mentioned
in (Chen, 1991), etc.).
To put the Line-Plane registration into the context
and provide fluent introduction to actual derivation of
our method, we will discuss it together with a closely
related topic of methods designed for Vector-Vector
matching.
2 RELEVANT FACTS TO
LINE-PLANE REGISTRATION
As the work directly related our topic is so rare, we
will not start with traditional literature review, but
rather state the problem and than discuss its connec-
tions and differences from more established domains.
2.1 Problem Statement
Rigid transformation can be described by a rotation
matrix R and translation vector t
t
t acting on a vector in
the well known manner: x
x
x
0
= Rx
x
x + t
t
t. A line can be
described by a unit directional vector d
d
d and another
vector p
p
p representing a point lying on it. A general
plane is uniquely determined by a unit normal vector
n
n
n and the shortest distance l along this vector to the
origin. (Chen, 1991) formulates the problem as find-
ing R and t
t
t satisfying the equations:
n
n
n
i
· Rd
d
d
i
= 0 (1)
and
n
n
n
i
· (Rp
p
p
i
+t
t
t) = l
i
, (2)
for i = 1, 2, 3. As we are going to work with N ≥ 3
number of corresponding pairs, we will search for R
and t
t
t minimizing the error functions derived from (1)
and (2). For rotation R we get:
E
r
(R) =
N
∑
i=1
(n
n
n
i
· Rd
d
d
i
)
2
, (3)
but generalization of (2) is not that straightforward.
(Chen, 1991) uses only three equations to find R,
therefore the perfect match is guaranteed and the three
equalities (1) for i = 1,2,3 will be exactly valid.
When using N ≥ 3 equations, residual error depend-
ing on parametrization of the line will appear. p
p
p
i
is
an arbitrary point lying on the i-th line, so adding
some multiple of d
d
d
i
to p
p
p
i
should not influence any-
thing. Simple rearrangement of (2) gives:
n
n
n
i
·t
t
t = l
i
− n
n
n
i
· Rp
p
p
i
. (4)
Plugging p
p
p
i
+δd
d
d
i
instead of p
p
p
i
into (4) should not
influence the equality, but the following happens:
n
n
n
i
·t
t
t = l
i
− n
n
n
i
· Rp
p
p
i
− δn
n
n
i
· Rd
d
d
i
. (5)
The last term δn
n
n
i
· (Rd
d
d
i
) is guaranteed to be zero
if and only if N = 3, otherwise this is not necessar-
ily true and selection of p
p
p
i
could influence the result,
which is undesirable. To overcome this issue, we have
decided to use the point on the line closest to the ori-
gin of coordinates (p
p
p
i0
= p
p
p
i
− (p
p
p
i
· d
d
d
i
)d
d
d
i
) in place of
arbitrary p
p
p
i
, so the computation will get independent
of the choice of p
p
p
i
. Keeping the original notation we
arrive at the error function for translation:
E
t
(R,t
t
t) =
N
∑
i=1
(n
n
n
i
· (R(p
p
p
i
− d
d
d
i
(d
d
d
i
· p
p
p
i
)) +t
t
t) − l
i
)
2
. (6)
(Kamgar-Parsi and Kamgar-Parsi, 2011) advocate
even more robust approach to translation estimation,
pointing out dependency of the solution on selection
of the coordinate system. We found it much less sever
than the dependency on parametrisation of the lines,
so we have taken no precautions. In case of necessity,
our method should be modifiable in that manner at
cost of additional computational complexity.
Since evaluation of E
t
depends both on R and t
t
t and
there is a separate formula for R only, it is possible to
start with minimization of E
r
alone and than minimize
E
t
with given R. This way we follow order of the
operations during transformation and obtain sensible
results for both parameters, as presented in 2D case of
line segments in (Jelinek, 2018). Let us examine the
rotational part at first.
2.2 Optimal Rotation
Lines and planes can be, among many other ways, de-
scribed using vectors. If only orientation is a con-
cern, than for lines, we extract the directional vectors
and for planes the normal vectors. In Line-Line and
Plane-Plane problems, the rotational part of registra-
tion boils down to alignment of two sets of vectors.
This operation is well described in literature and the
first appearance was probably the Wahba’s problem
(Wahba, 1965) formulated as follows:
Given two sets of N points {v
v
v
1
, v
v
v
2
, ··· , v
v
v
N
} and
{v
v
v
0
1
, v
v
v
0
2
, ··· , v
v
v
0
N
}, where N ≥ 2, find the rotation matrix
R (i.e. the orthogonal matrix with determinant +1)
which brings the first set into the best least squares
coincidence with the second. That is, find R which
minimizes:
N
∑
i=1
k v
v
v
0
i
− Rv
v
v
i
k
2
. (7)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
626

2.2.1 A State of the Art Solution for Vectors
Therea are plenty of solutions, for example a decom-
position method by (Farrell et al., 1966), the Kab-
sch algorithm (Kabsch, 1976) and many other papers,
nicely surveyed in (Markley and Mortari, 2000). So-
lution using singular value decomposition (SVD) is
widely accepted and proceeds as follows.
Stationary vectors v
v
v
0
i
and rotated vectors v
v
v
1
are or-
ganized in matrices:
V =
v
x1
v
y1
v
z1
v
x2
v
y2
v
z2
.
.
.
v
xN
v
yN
v
zN
,V
0
=
v
0
x1
v
0
y1
v
0
z1
v
0
x2
v
0
y2
v
0
z2
.
.
.
v
0
xN
v
0
yN
v
0
zN
,
(8)
which provide the covariance matrix C:
C = V
T
V
0
, (9)
with
T
for transposition. SVD of the covariance ma-
trix expresses it as a product of three matrices:
C = USV
T
. (10)
The optimal rotation matrix is given by equation:
R = V
1 0 0
0 1 0
0 0 d
U
T
, (11)
where d = det(VU
T
). Note that the rotation R is an-
alytically expressed in terms of linear algebra provid-
ing a single optimal result. Although orthonormality
of the rotation matrix imposes non-linear constraints
on its nine elements, there is no need to reflect them
in the computation. SVD approach (8) - (11) repre-
sents state of the art solution, but it does not clearly
illustrate geometrical reason, why is that possible.
2.2.2 On Unnecessity of Non-linear Constraints
in Vector-Vector Registration
The example below briefly shows, why for Vector-
Vector registration the constraints are naturally ful-
filled and why the Line-Plane case is more compli-
cated.
Let us again start with the two sets of unitary cor-
responding vectors (8). Coordinate frames of each
set are described by the orthonormal bases of three
vectors E = {e
e
e
1
, e
e
e
2
, e
e
e
3
} and E
0
= {e
e
e
0
1
, e
e
e
0
2
, e
e
e
0
3
}, both
equal to E
0
= {{1, 0, 0}, {0, 1, 0}, {0, 0,1}} at the be-
ginning. Then for every corresponding pair, we find a
rotation R
i
which brings the registered vector v
v
v
i
into
coincidence with static v
v
v
0
i
. Axis of such rotation is
determined by the cross product v
v
v
i
× v
v
v
0
i
and the angle
corresponds to arccos(v
v
v
i
· v
v
v
0
i
). Frame E would than
Figure 1: All possible poses of the coordinate frame E
bringing vector v
v
v
i
(black) into perfect coincidence with v
v
v
0
i
(grey) from the second set. Red, green and blue circular
traces demarcate possible locations of the basis vectors of
E.
correspond to R
i
E
0
as depicted in Fig. 1, where RGB
vectors are used to plot its axes.
But that is only one of infinitely many possible
rotations. After the first alignment, we can rotate E
about v
v
v
0
i
by an arbitrary angle and both vectors will
still perfectly coincide. Further rotation about v
v
v
0
i
re-
sults into a circular trace around v
v
v
0
i
for each e
e
e
j
(see
again Fig.1). One corresponding pair of vectors is
therefore not enough to specify orientation of the new
basis. On the other hand, we know exactly the magni-
tudes of projections of the basis vectors e
e
e
j
onto v
v
v
0
i
,
which remain constant for all possible poses of E.
With N ≥ 3, we can for every e
e
e
j
construct a system of
linear equations:
A
j
= V
0
, B
j
=
(R
1
e
e
e
j0
) · v
v
v
1
(R
2
e
e
e
j0
) · v
v
v
2
.
.
.
(R
N
e
e
e
j0
) · v
v
v
N
. (12)
For noise-less vecor sets V and V
0
, the least
squares solutions of the A
j
e
e
e
j
= B
j
systems yield the
coordinate frame E, which directly represents the ro-
tation R we sought for. Indeed, the approach sketched
above is inferior to the SVD solution, because it re-
quires N ≥ 3 even though it is proved that N ≥ 2 is
enough (Markley and Mortari, 2000), SVD works on
noised data as well and for large N its computational
costs are much lower. On the other hand, this example
clearly illustrates, why no non-linear constraints are
required in Vector-Vector registration. Distribution
of the invariant projections in matrices B
j
and (for
noised data) the properties of SVD encode enough in-
formation to retrieve proper rotation matrix R.
Lines to Planes Registration
627

2.2.3 The Line-Plane Problem Specificity
The geometric intuition behind the computation pro-
cedure described above can be easily extended to
Line-Plane registration. Using the notation from in-
troductory part of Section 2, the rotation which makes
a directional vector d
d
d
i
of a line orthogonal to a normal
vector n
n
n
i
of a plane, can be easily computed using
the products d
d
d
i
× n
n
n
i
and d
d
d
i
· n
n
n
i
, similar to the Vector-
Vector example above. After that operation, we can
freely rotate the coordinate frame not only about n
n
n
i
,
which corresponds to the previous example as well,
but also about the, now orthogonal, d
d
d
i
.
This is a defining difference, because two degrees
of freedom in rotation cause loss of the constant size
projections, leaving us with no invariants to rely on.
Depiction in sense of Fig. 1 would show three over-
laying ring-like bands spanned around the n
n
n
i
vector.
It would be possible to use inequalities to describe
all possible locations of the basis vectors, but the ad-
vantage of implicitly present constraints embodied in
invariants would be lost anyway. This thought ex-
periment shows, inevitable non-linearity of the rota-
tional registration problem when lines and planes are
in question.
2.3 Optimal Translation
Contrary to the complicated matter of search for opti-
mal rotation, the translational part of the registration
turns out to be somewhat simpler. In case of formula
(2) by (Chen, 1991) it is a linear system of three equa-
tions with three variables. Due to our extension to
N ≥ 3 corresponding pairs we have to adopt the ad-
justment described in the problem statement in Sec-
tion 2.1. Then the optimal solution to minimization
of (6) turns out to be a straightforward least squares
computation as we will show near the end of the fol-
lowing section.
3 DERIVATION OF THE
METHOD
Previous discussion revealed, that our main concern
is minimization of (3) in search for optimal rotation
matrix R. We denote its elements as follows:
R =
r
r
r
x
r
r
r
y
r
r
r
z
=
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
(13)
and use them to write down the constraints, which ev-
ery proper rotation matrix has to fulfil:
r
r
r
x
· r
r
r
x
− 1 = 0,
r
r
r
y
· r
r
r
y
− 1 = 0,
r
r
r
z
· r
r
r
z
− 1 = 0,
r
r
r
x
· r
r
r
y
= 0,
r
r
r
y
· r
r
r
z
= 0,
r
r
r
z
· r
r
r
x
= 0
(14)
and then we define a vector r
r
r of R elements such that:
r
r
r =
r
11
r
12
r
13
r
21
··· r
33
. (15)
Next we take an outer product of n
n
n
i
and d
d
d
i
:
n
n
n
i
d
d
d
T
i
=
n
xi
d
xi
n
xi
d
yi
n
xi
d
zi
n
yi
d
xi
n
yi
d
yi
n
yi
d
zi
n
zi
d
xi
n
zi
d
yi
n
zi
d
zi
(16)
and organize it similar to r
r
r into a vector s
s
s
i
:
s
s
s
i
=
n
xi
d
xi
n
xi
d
yi
n
xi
d
zi
n
yi
d
xi
··· n
zi
d
zi
.
(17)
After this preparation, the error function (3) can
be expressed as:
E
r
(R) =
N
∑
i=1
(n
n
n
i
· Rd
d
d
i
)
2
=
N
∑
i=1
(s
s
s
i
· r
r
r)
2
. (18)
Equation (18) in conjunction with constraints (14)
forms a starting point for further computation. In
principle, we try to find a least squares solution best
fulfilling equality s
s
s
i
· r
r
r = 0 for i = 1 ···N, but non-
linear constraints prevent us from the straightforward
way of acquiring the result. Instead, we employ La-
grange multipliers λ
j
and formulate a Lagrange func-
tion:
L
Er
(r
r
r, λ
1,···,6
) =
N
∑
i=1
(s
s
s
i
· r
r
r)
2
−
6
∑
j=1
λ
j
c
j
(r
r
r), (19)
where c
j
(r
r
r) are constraints (14). Partially differentiat-
ing this formula with respect to r
r
r yields the following
set of equations:
2λ
1
r
11
+ λ
4
r
12
+ λ
5
r
13
= 2
N
∑
i=1
n
xi
d
xi
s
s
s
i
· r
r
r,
2λ
2
r
12
+ λ
4
r
11
+ λ
6
r
13
= 2
N
∑
i=1
n
xi
d
yi
s
s
s
i
· r
r
r,
2λ
3
r
13
+ λ
5
r
11
+ λ
6
r
12
= 2
N
∑
i=1
n
xi
d
zi
s
s
s
i
· r
r
r,
2λ
1
r
21
+ λ
4
r
22
+ λ
5
r
23
= 2
N
∑
i=1
n
yi
d
xi
s
s
s
i
· r
r
r,
2λ
2
r
22
+ λ
4
r
21
+ λ
6
r
23
= 2
N
∑
i=1
n
yi
d
yi
s
s
s
i
· r
r
r,
2λ
3
r
23
+ λ
5
r
21
+ λ
6
r
22
= 2
N
∑
i=1
n
yi
d
zi
s
s
s
i
· r
r
r,
2λ
1
r
31
+ λ
4
r
32
+ λ
5
r
33
= 2
N
∑
i=1
n
zi
d
xi
s
s
s
i
· r
r
r,
2λ
2
r
32
+ λ
4
r
31
+ λ
6
r
33
= 2
N
∑
i=1
n
zi
d
yi
s
s
s
i
· r
r
r,
2λ
3
r
33
+ λ
5
r
31
+ λ
6
r
32
= 2
N
∑
i=1
n
zi
d
zi
s
s
s
i
· r
r
r.
(20)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
628

Differentiating of L
Er
(r
r
r, λ
1,···,6
) with respect to
λ
1,···,6
gives back the constraints (14). (20) and (14)
form a system of non-linear equations to be solved
for r
r
r and λ
1,···,6
, directly leading to the rotation ma-
trix R. The crucial result is the independence of the
size of the non-linear system on the number of corre-
sponding pairs N. The information from an arbitrarily
high number of corresponding pairs is condensed in
the right side sums of (20). Detachment of search for
R from data aggregation allows better computational
optimization of both stages of the algorithm. Fur-
thermore, because every set of corresponding pairs is
fully specified by its sums, separate precomputation
allows constant time merging and splitting of sets, for
which the sums are known. This feature might be
utilized in correspondence search algorithms, making
our approach worth usage in this field as well.
In many situations, an initial guess supplied to the
numerical solver is mandatory or beneficial at least.
Any proper rotation matrix R
0
implies the values of
vector r
r
r, but we need a good guess of Lagrange mul-
tipliers λ
1,···,6
at the beginning as well. Fortunately,
proper R
0
automatically satisfies constraints (14) and
plugging its elements in place of r
r
r in the system of
equations (20) leaves us with linear system of nine
equations for six unknowns λ
1,···,6
. Common least
squares solution provides us with good initial setting
of λ
1,···,6
corresponding to R
0
.
The last step of the registration process is enumer-
ation of the optimal translation. In Section 2.1 we
have arrived at the error function (6):
E
t
(R,t
t
t) =
N
∑
i=1
(n
n
n
i
· (R(p
p
p
i
− d
d
d
i
(d
d
d
i
· p
p
p
i
)) + t
t
t) − l
i
)
2
.
With R being known, we can reformulate the prob-
lem into N equations:
n
n
n
i
·t
t
t = l
i
− n
n
n
i
· R(p
p
p
i
− d
d
d
i
(d
d
d
i
· p
p
p
i
)), (21)
with variable t
t
t and the right side being known. An-
other overdetermined linear system suitable for least
squares solution have arisen in our computation.
Solving it yields the optimal translation we have been
looking for, while the sum of squared residuals pro-
vides accompanying error metric.
4 PRACTICAL VERIFICATION
Each theoretical result calls for empirical verifica-
tion and comprehensive testing is mandatory for every
new method being deployed to practice. To test our
registration procedure, we have designed a few syn-
thetic tests exploring its main properties. The testing
code is written in Python 3.6.5 using NumPy 1.14.2
and SciPy 1.0.1 packages. We have not aimed for high
computational performance and the implementation is
not optimized in that respect. Underlying linear alge-
bra libraries and non-linear solvers are going to vary a
lot on different platforms in different applications, so
reasonably general benchmarking is highly problem-
atic. To provide at least some numbers, we can say
that on a 4.0A GHz CPU with lowly elaborated single
threaded implementation, the mean registration time
measured was a few milliseconds. Indeed, correspon-
dence count N and quality of initial guess influence
that number.
For error enumeration, there is a metric provided
by the method itself. For rotation, it is E
r
obtained
from equations (3) or (18) and for translation we use
E
t
(6), both available after every computation. We
refer it as an error function value. For the needs of
synthetic testing, we also employ Frobenius norm of
the difference between R estimated and the true rota-
tion matrix R
t
used during data generation. Denoting
this difference R
d
, the Frobenius error E
f
of the reg-
istration is:
F
r
(R) =
v
u
u
t
3
∑
j=1
3
∑
k=1
r
2
jk
, (22)
where r
jk
are elements of R
d
. This error metric is ob-
viously not available in real-life application, because
R
t
is unknown, but in synthetic testing it provides use-
ful comparison with the ground truth. Similar compu-
tation applies for translational part:
F
t
(t
t
t) =
p
(t
t
t −t
t
t
t
) · (t
t
t −t
t
t
t
), (23)
4.1 Stability and Convergence
The first test is focused on reliability of convergence
to correct R, when imprecise initial guess is supplied
to the algorithm. If the guess is precise, the non-
linear solver terminates after the first iteration leaving
the guess untouched, regardless the size of N. How-
ever if the guess does not comply with the data, the
solver might get caught in local minimum and pro-
vide suboptimal result. To test this behavior, we have
generated precisely corresponding pairs of line direc-
tions and plane normals and than rotated the direc-
tion with matrix R
t
. Next, the noise rotation matrix
R
n
was composed from arbitrary axis and angle be-
tween zero and a predefined maximum. The initial
guess was than given by the product R
n
R
t
. Without
any noise in the data it is easy to detect suboptimal
results, because for correct registration, both E
r
and
F
r
are zero (up to certain negligible numerical error).
Success ratios for various N and initial guess error
amplitudes are organized in Tab. 1. One can clearly
Lines to Planes Registration
629

see importance of data set size for convergence of
the algorithm. For minimal input of three correspon-
dences, even a slight deviation of 3
◦
led to poten-
tial mismatches, however only two more Line-Plane
pairs moved this limit to 30
◦
, which is tremendous
improvement for its cost. Increasing N above a few
tens of pairs does not seem to help anything, when
convergence is in question.
Computation of optimal translation is a linear
problem featuring a single minimum for which an an-
alytical solution exists, so convergence is not an issue
in this case.
4.2 Noise Sensitivity and Accuracy
Second important experiment was performed to ex-
plore sensitivity of the method, when noise is present
in the input data. We have composed the noise matrix
using the same rules as in the previous experiment,
but now it was applied in conjunction with R
t
, when
the direction vectors were rotated. In this case, even
the optimal rotation produces some amount of error,
so neither error metric is zero any more.
Figures 3 and 2 summarize the outcomes of this
experiment in case of rotation. For low N, espe-
cially for N = 3 and 5 we see an interesting behaviour.
(Chen, 1991) showed, that for non-degenerate set of
three Line-Plane pairs, there is an exact solution to the
registration problem, but we observe a non-zero error
E
r
. More than one reason is possible. First, in some
cases, the solution returned by the algorithm might
not be optimal (thus exhibiting non-zero error) in-
creasing the overall mean error from all experiments.
The second possible cause of these results is the num-
ber of vectors being involved. Three or five pairs
are simply not enough to provide a reliable statistics.
There is a good chance, that none of the vectors in-
volved was influenced by the noise with full ampli-
tude, resulting in more precise data than expected,
Table 1: Success ratio of correct convergence of the optimal
rotation search with given maximal error in initial guess of
the matrix and given number N of corresponding pairs used.
N
Error of the initial guess in degrees
1 3 5 10 30 50
3 1,00 0,99 0,98 0,97 0,89 0,77
5 1,00 1,00 1,00 1,00 0,99 0,91
10 1,00 1,00 1,00 1,00 1,00 0,99
30 1,00 1,00 1,00 1,00 1,00 1,00
50 1,00 1,00 1,00 1,00 1,00 1,00
100 1,00 1,00 1,00 1,00 1,00 1,00
300 1,00 1,00 1,00 1,00 1,00 1,00
500 1,00 1,00 1,00 1,00 1,00 1,00
1000 1,00 1,00 1,00 1,00 1,00 1,00
therefore lowering the mean error values. For higher
N, we see a gradual decrease of both error metrics,
proving an expectation, that larger data set should lead
to more precise outcomes. Comparison of E
r
and F
r
characteristics also proves feasibility of the E
r
error
metric. Although it tends to underestimate the error
for very small N, it corresponds to reliable F
r
based
on the original true rotation matrix.
The translational part of the registration was of
course tested as well. As its linear nature suggests,
we observe a gradual decrease in error for higher N,
(see Figures 5 and 4), but if N = 3, 5 there is more
to discuss. First, for cases when N = 3, there al-
ways exist an exact solution to the system of equa-
tions (21), making the expected error E
t
zero (not
plotted in Fig. 4). Nevertheless, the Frobenius error
F
t
(Fig. 5) derived from true translation shows non-
proportionally high values for N = 3. This behavior
is even stronger argument against Line-Plane registra-
tion with only three samples, than similar effect man-
ifesting in rotation enumeration. The N = 5 case is
still influenced by error underestimation, but at least,
we get reasonable values to alarm our attention. For
higher N, E
t
nicely reflects true error behavior de-
10
0
10
1
10
2
10
3
Number of points N
10
−8
10
−7
10
−6
10
−5
10
−4
10
−3
10
−2
E
r
Figure 2: Error function (3) divided by N
2
reflecting ex-
pected deviation from true rotation matrix for various num-
ber of points N. Paths in the chart belong to 1
◦
, 2
◦
, 5
◦
, 10
◦
,
20
◦
peak error in line directions in bottom up order.
10
0
10
1
10
2
10
3
Number of points N
10
−4
10
−3
10
−2
10
−1
F
r
Figure 3: Frobenius error reflecting real deviation from true
rotation matrix for various number of points N. Paths in
the chart belong to 1
◦
, 2
◦
, 5
◦
, 10
◦
, 20
◦
peak error in line
directions in bottom up order.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
630
scribed by F
t
and can be safely used to determine ex-
pected error of the computation.
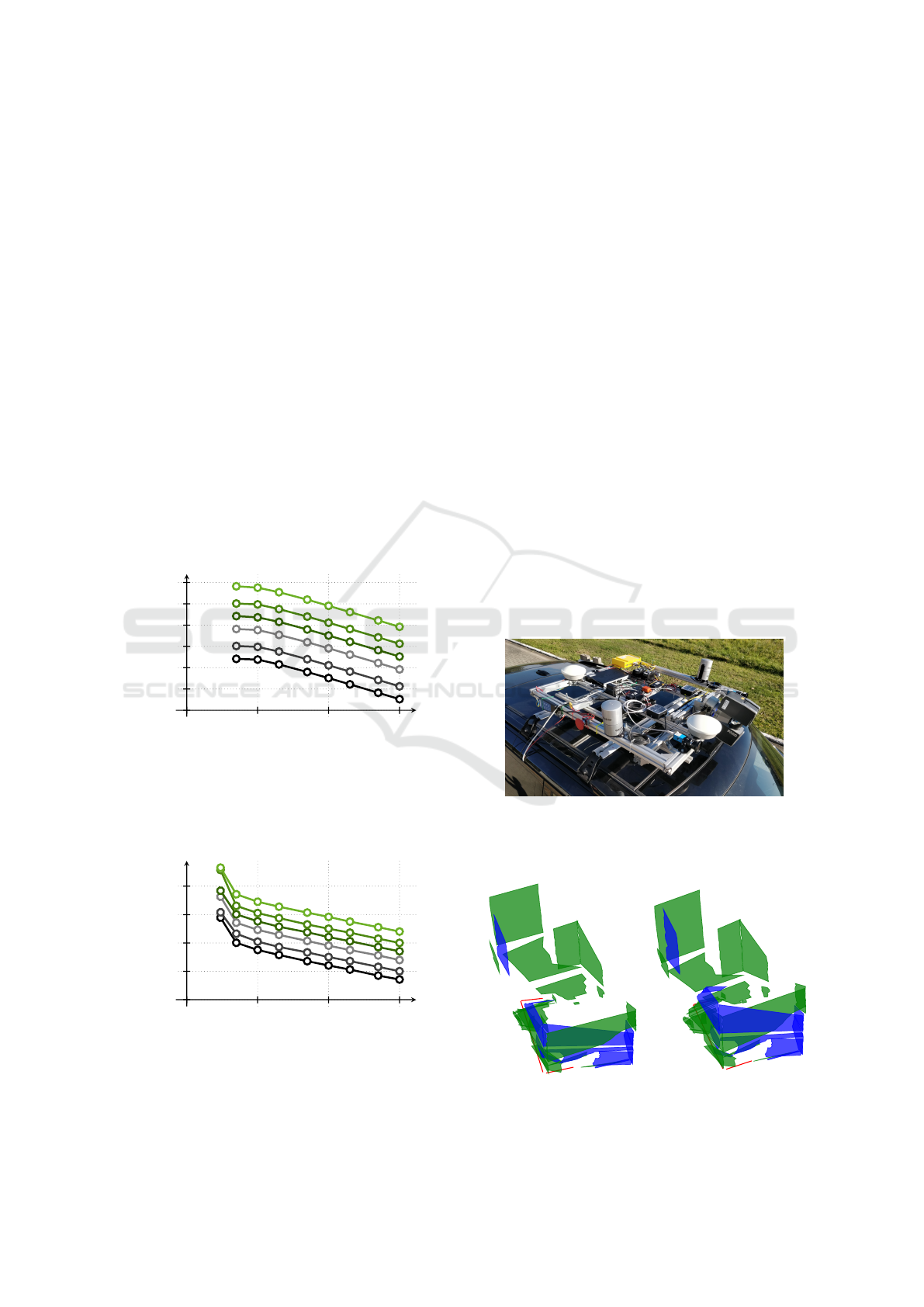
4.3 Real Data Testing
Truly empirical experiments turned out to be some-
what problematic to perform, because acquiring
highly accurate control measurements is quite hard.
Our real-life application is calibration of surround
sensing devices for mobile robots (Zalud et al., 2015),
(Kocmanova et al., 2013), in this case a mutual pose
of 3D and 2D sensing laser scanners (see Fig. 6). Each
of these devices has its own frame of coordinates, but
its origin is inside of the body of the device, so tak-
ing exact measurements is extremely difficult. Verifi-
cation therefore does not come from direct measure-
ment, but rather from comparison of overlay of the
point clouds measured by the devices, before and after
the calibration transformation is applied. This overlay
can be enumerated by multitude methods resulting in
many numerical values (Pomerleau et al., 2015), but
the essence of all comparisons is simple: The point
10
0
10
1
10
2
10
3
Number of points N
10
−6
10
−5
10
−4
10
−3
10
−2
10
−1
10
0
E
t
Figure 4: Error function (6) divided by N
2
reflecting ex-
pected deviation from true translation vector for various
number of points N. Paths in the chart belong to 1, 2, 5,
10, 20 and 50 percent peak error with respect to maximal
mutual distance of lines and planes (in bottom up order).
10
0
10
1
10
2
10
3
Number of points N
10
−3
10
−2
10
−1
10
0
10
1
F
t
Figure 5: Frobenius error reflecting real deviation from true
translation vector for various number of points N. Paths in
the chart belong to 1, 2, 5, 10, 20 and 50 percent peak error
with respect to maximal mutual distance of lines and planes
(in bottom up order).
clouds after calibration fit together much better than
without it (see Fig. 7), despite the metric used. How-
ever humble this number-less experiment looks on the
paper, it is a clear evidence of functionality of the reg-
istration method described above.
5 CONCLUSIONS
The Line-Plane registration problem is surprisingly
unexplored in the literature. This paper provides in-
tuitive introduction into peculiar details of the topic
and, to our best knowledge, presents a solution with
properties exceeding any other method approaching
this problem.
Our algorithm works with any number N of the
corresponding Line-Plane pairs greater than three a
splits the computation into O(N) complex linear part
and N-independent non-linear part. The error metric
is supplied, which allows reliability evaluation of the
computation and the method also works, if all lines
lie in a single plane. Increasing size N of the dataset
leads to higher stability of the computation as well
as higher precision of the results. If an initial guess
of the transformation is provided, the computation is
faster and more robust. All these results were practi-
Figure 6: The Atlas sensory platform designed for surround
sensing of autonomous vehicles. Line-Plane registration is
used for mutual pose calibration of the FARO laser scanner
and both Velodyne laser scanners.
(a) Rough pose estimate. (b) After registration.
Figure 7: Line-Plane registration in a calibration scenario.
Lines to Planes Registration
631

cally verified in Section 4. Based on the experiments,
we strongly advocate to use at least N = 5 for better
robustness, which contradicts many methods requir-
ing N = 3.
ACKNOWLEDGEMENTS
The research was supported by ECSEL JU under the
project H2020 737469 AutoDrive - Advancing fail-
aware, fail-safe, and fail-operational electronic com-
ponents, systems, and architectures for fully auto-
mated driving to make future mobility safer, afford-
able, and end-user acceptable. This research has been
financially supported by the Ministry of Education,
Youth and Sports of the Czech republic under the
project CEITEC 2020 (LQ1601).
REFERENCES
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza,
D., Neira, J., Reid, I., and Leonard, J. J. (2016). Past,
Present, and Future of Simultaneous Localization and
Mapping: Toward the Robust-Perception Age. IEEE
Transactions on Robotics, 32(6):1309–1332.
Chen, H. (1991). Pose determination from line-to-plane
correspondences: existence condition and closed-
form solutions. IEEE Transactions on Pattern Analy-
sis and Machine Intelligence, 13(6):530–541.
Farrell, J. L., Stuelpnagel, J. C., Wessner, R. H., Velman,
J. R., and Brook, J. E. (1966). A Least Squares Esti-
mate of Satellite Attitude (Grace Wahba). SIAM Re-
view, 8(3):384–386.
Forstner, W. and Khoshelham, K. (2017). Efficient and
Accurate Registration of Point Clouds with Plane to
Plane Correspondences. In 2017 IEEE International
Conference on Computer Vision Workshops (ICCVW),
pages 2165–2173. IEEE.
Grimson, W. E. L. and Lozano-P
´
erez, T. (1984). Model-
Based Recognition and Localization from Sparse
Range or Tactile Data. The International Journal of
Robotics Research, 3(3):3–35.
Jelinek, A. (2018). On registration of vector maps with
known correspondences. In 2018 ELEKTRO, pages
1–6. IEEE.
Kabsch, W. (1976). A solution for the best rotation to relate
two sets of vectors. Acta Crystallographica Section A,
32(5):922–923.
Kamgar-Parsi, B. and Kamgar-Parsi, B. (2011). Matching
2D image lines to 3D models: Two improvements and
a new algorithm. In CVPR 2011, pages 2425–2432.
IEEE.
Kocmanova, P., Zalud, L., and Chromy, A. (2013). 3D prox-
imity laser scanner calibration. In 2013 18th Interna-
tional Conference on Methods & Models in Automa-
tion & Robotics (MMAR), pages 742–747. IEEE.
Li, X., Zhang, Y., Shang, Y., and Liu, H. (2016). Proba-
bilistic approach for maximum likelihood estimation
of pose using lines. IET Computer Vision, 10(6):475–
482.
Markley, F. L. and Mortari, D. (2000). How to estimate
attitude from vector observations. Advances in the As-
tronautical Sciences, 103(PART III):1979–1996.
Olsson, C., Kahl, F., and Oskarsson, M. (2006). The Reg-
istration Problem Revisited: Optimal Solutions From
Points, Lines and Planes. In 2006 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition - Volume 1 (CVPR’06), volume 1, pages
1206–1213. IEEE.
Pomerleau, F., Colas, F., and Siegwart, R. (2015). A Re-
view of Point Cloud Registration Algorithms for Mo-
bile Robotics. Foundations and Trends in Robotics,
4(1):1–104.
Ramalingam, S., Taguchi, Y., Marks, T. K., and Tuzel,
O. (2010). P2Pi: A Minimal Solution for Reg-
istration of 3D Points to 3D Planes BT - Com-
puter Vision–ECCV . . . . Computer Vision–ECCV . . . ,
6315(Chapter 32):436–449.
Tam, G. K. L., Zhi-Quan Cheng, Yu-Kun Lai, Langbein,
F. C., Yonghuai Liu, Marshall, D., Martin, R. R.,
Xian-Fang Sun, and Rosin, P. L. (2013). Registration
of 3D Point Clouds and Meshes: A Survey from Rigid
to Nonrigid. IEEE Transactions on Visualization and
Computer Graphics, 19(7):1199–1217.
Wahba, G. (1965). A Least Squares Estimate of Satellite
Attitude. SIAM Review, 7(3):409–409.
Wientapper, F. and Kuijper, A. (2017). Unifying Alge-
braic Solvers for Scaled Euclidean Registration from
Point, Line and Plane Constraints. In Lecture Notes
in Computer Science, pages 52–66. Springer Interna-
tional Publishing.
Zalud, L., Kocmanova, P., Burian, F., Jilek, T., Kalvoda, P.,
and Kopecny, L. (2015). Calibration and Evaluation
of Parameters in A 3D Proximity Rotating Scanner.
Elektronika ir Elektrotechnika, 21(1):3–12.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
632
