
Proactive Model for Handling Conflicts in Sensor Data Fusion Applied to
Robotic Systems
Gilles Neyens and Denis Zampunieris
Department of Computer Science, University of Luxembourg, Luxembourg
Keywords:
Decision Support System, System Software, Proactive Systems, Robotics.
Abstract:
Robots have to be able to function in a multitude of different situations and environments. To help them
achieve this, they are usually equipped with a large set of sensors whose data will be used in order to make
decisions. However, the sensors can malfunction, be influenced by noise or simply be imprecise. Existing
sensor fusion techniques can be used in order to overcome some of these problems, but we believe that data
can be improved further by computing context information and using a proactive rule-based system to detect
potentially conflicting data coming from different sensors. In this paper we will present the architecture and
scenarios for a generic model taking context into account.
1 INTRODUCTION
Robots generally have to be able to adapt to all kinds
of different situations. In order to manage this task,
they have to combine data from several different sen-
sors which will then be used by the robot to make de-
cisions. Sensor fusion is used to achieve this and re-
duce the uncertainty the resulting information would
have in case the sensors were used individually.
A lot of these techniques are carried out on a set of
homogeneous sensors while others exist that are used
on heterogeneous sensors, like for example to calcu-
late a more accurate position of the robot (Bostanci
et al., 2018; Nemra and Aouf, 2010).
Similarly, there exists work on integrating a trust
model in to the data fusion process(Chen et al., 2017).
The approach is calculating trust values for each sen-
sor based on historical data of a sensor, the current
data, and a threshold representing the upper bound of
the maximum allowed difference between the current
data and the historical data.
While the previous method attributes trust or con-
fidence values to sensors based on historical data, it
is only based on the data of the same sensor. Other
methods try to improve this by taking context into
account like (Tom and Han, 2014) or (Akbari et al.,
2017) in which they use rules to adapt the parameters
of a kalman filter based on the current context.
The model we propose in this paper will be set be-
tween the sensors and the final decision making of the
robot, and will work together with other fusion meth-
ods in order to improve the information that the robot
receives. The goal is to reduce the probability of mal-
functioning or corrupted sensors negatively affecting
the robot. The system will in a first step use classifi-
cation algorithms tailored for each sensor in order to
obtain confidence/trust values for each sensor and in
a second step use a priori knowledge about relations
between sensors and a proactive rule-based system to
further refine the confidence for each sensor and po-
tentially improve the data based on the current con-
text.
In the next section, we are going to give a quick
overview of existing works in the field. In section 3
we will propose our model and in section 4 the inter-
nal workings of the model will get explained in detail.
Finally, we will conclude and give some prospects for
future work.
2 STATE OF THE ART
In the past years several sensor fusion methods have
been used to aggregate data coming from different
sensors. Depending on the level of fusion, different
techniques have been used. In robotics the most pop-
ular method for low-level data is the Kalman filter
which was developed in 1960 (Kalman, 1960) along
with its variants the extended Kalman filter or the un-
scented Kalman filter who are often used in naviga-
tion systems (Hide et al., 2003; Sasiadek and Wang,
1999), but also other methods like the particle filter.
468
Neyens, G. and Zampunieris, D.
Proactive Model for Handling Conflicts in Sensor Data Fusion Applied to Robotic Systems.
DOI: 10.5220/0007835504680474
In Proceedings of the 14th International Conference on Software Technologies (ICSOFT 2019), pages 468-474
ISBN: 978-989-758-379-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: System architecture.
On a decision level other methods like the Dempster
Shafer theory (Dempster, 1968; Shafer, 1976) is used.
For the purpose of this paper, we are going to
focus on work done on Kalman and particle filters.
Some time ago, studies which used either of these,
often did not take sensor failures and noise into ac-
count, which made these solutions vulnerable in harsh
and uncertain environments. A recent study partly ad-
dressed these issues by using a particle filter method
in combination with recurrent neural networks (Tu-
ran et al., 2018). This solution managed to correctly
identify situations in which sensors were failing but
did not yet take sensor noise into account. In (Bader
et al., 2017) the authors propose a fault tolerant ar-
chitecture for sensor fusion using Kalman filters for
mobile robot localization. The detection rate of the
faults injected was 100%, however the diagnosis and
recovery rate is lower at 60%. The study in (Yazd-
khasti and Sasiadek, 2018) proposed two new exten-
sions to the kalman filter, the Fuzzy Adaptive Iter-
ated Extended Kalman Filter and the Fuzzy Adap-
tive Unscented Kalman Filter in order to make the fu-
sion process more resistant to noise. In (Kordestani
et al., 2018), the authors used the extended kalman
filter in combination with bayesian method and man-
aged to detect and predict not only individual failures
but also simultaneous occurring failures, however no
fault handling was proposed.
3 MODEL
3.1 Architecture
The general architecture of our model is shown in
Fig. 1. The sensors of the robot send their data to
our system where the classifiers attribute a confidence
value for each sensor individually (Neyens and Zam-
punieris, 2017). The proactive engine then uses the
results from the classifiers as well as the data in the
knowledge base in order to further check the trustwor-
thiness of the different sensors by detecting and re-
solving potential conflicts between sensors (Neyens,
2017; Neyens and Zampunieris, 2018).
The robot itself will pass the data coming from the
sensors to our system where it will get processed. It
then will get enhanced data along with information on
which sensors to trust from our system, which it will
then use to make a decision.
In our system the data will first get processed
by some classification algorithms, like for example
Hidden Markov Models or Neural Networks, in or-
der to determine if a sensor is failing or still work-
ing correctly, along with a confidence value for each
sensor. The results from the classification will then
be passed to our rule-based engine where it will get
passed through a series of steps which will be de-
scribed in Fig. 2.
Proactive Model for Handling Conflicts in Sensor Data Fusion Applied to Robotic Systems
469
Table 1: Sensor registration table.
Sensor name List of properties Minimum confidence Grace period History Length
GPS position, speed 0.8 15s 1000
Accelerometer acceleration 0.8 12s 800
Light lightlevel 0.5 30s 50
... ... ... ... ...
First we will describe what information our sys-
tem needs in order to fulfill its tasks. For every sensor
we need to know different variables as shown in ta-
ble 1. The name of the sensor is the identifier for a
given sensor and will be unique. The list of proper-
ties are the properties that can be computed from the
data from a given sensor, for example for a GPS it
would be position and speed. The minimum confi-
dence is the minimum value for the confidence com-
puted based on the classifiers for a sensor in order to
trust a sensor. Grace period is the time a sensor will
still be used for computations after deemed as untrust-
worthy. The history length is the amount of past data
kept for a given sensor.
In order for the system to know how different
properties affect each other or how they can be cal-
culated we need a knowledge base for these proper-
ties. The properties can either affect other properties
(e.g. a low light level could affect the camera and thus
image recognition modules) or they can be calculated
based on past data and other properties (e.g. position).
For the first case, a range of values is defined for each
property that defines the allowed values for a property
before it starts to affect other properties. For the sec-
ond case, a list of operations is needed, that allows the
system to know how to use past data and other prop-
erties to calculate an estimate of the given property.
Finally, the scenarios described in section 4 should
be able to synchronize between themselves and oper-
ate on the same data as the scenarios in the previous
steps of the flow did. For this, we divide the data into
chunks and attribute a number called execution num-
ber to each chunk. This number along with the execu-
tion step number then allows each scenario to decide
on which data it should currently operate.
3.2 Proactive System
We use Artificial Neural Networks (ANNs) to first
analyse the data, but only basing the model on them
would make it very difficult to follow decisions. Also,
as we want the system to be able to react to all kinds of
different contexts, training the ANNs would be very
difficult. Therefore we believe that using a rule-based
system is better suited for this task. In our model we
use the proactive engine developed in our team over
the years.
The concept of proactive computing was intro-
duced in 2000 by Tennenhouse (Tennenhouse, 2000)
as systems working for and on behalf of the user on
their own initiative (Salovaara and Oulasvirta, 2004).
Based on this concept a proactive engine (PE) which
is a rule-based system was developed (Zampunieris,
2006). The rules running on the engine can be con-
ceptually regrouped into scenarios with each scenario
regrouping rules that achieve a common goal (Zam-
punieris, 2008; Shirnin et al., 2012). A Proactive Sce-
nario is the high-level representation of a set of Proac-
tive Rules that is meant to be executed on the PE. It
describes a situation and a set of actions to be taken in
case some conditions are met (Dobrican et al., 2016).
The PE executes these rules periodically. The sys-
tem consists of two FIFO queues called currentQueue
and nextQueue. The currentQueue contains the rules
that need to be executed at the current iteration, while
the nextQueue contains the rules that were generated
during the current iteration. At the end of each itera-
tion the rules from the nextQueue will be added to the
currentQueue and the next Queue will be emptied.
A rule consists of any number of input parameters and
five execution steps (Zampunieris, 2006). These five
steps have each a different role in the execution of the
rule.
1. Data acquisition
During this step the rule gathers data that is impor-
tant for its subsequent steps. This data is provided
by the context manager of the proactive engine,
which can obtain this data from different sources
such as sensors or a simple database.
2. Activation guards
The activation guards will perform checks based
on the context information whether or not the con-
ditions and actions part of the rule should be exe-
cuted. If the checks are true, the activated variable
of this rule will be set to true.
3. Conditions
The objective of the conditions is to evaluate the
context in greater detail than the activation guards.
If all the conditions are met as well, the Actions
part of the rule is unlocked.
4. Actions
This part consists of a list of instructions that will
be performed if the activation guards and condi-
ICSOFT 2019 - 14th International Conference on Software Technologies
470
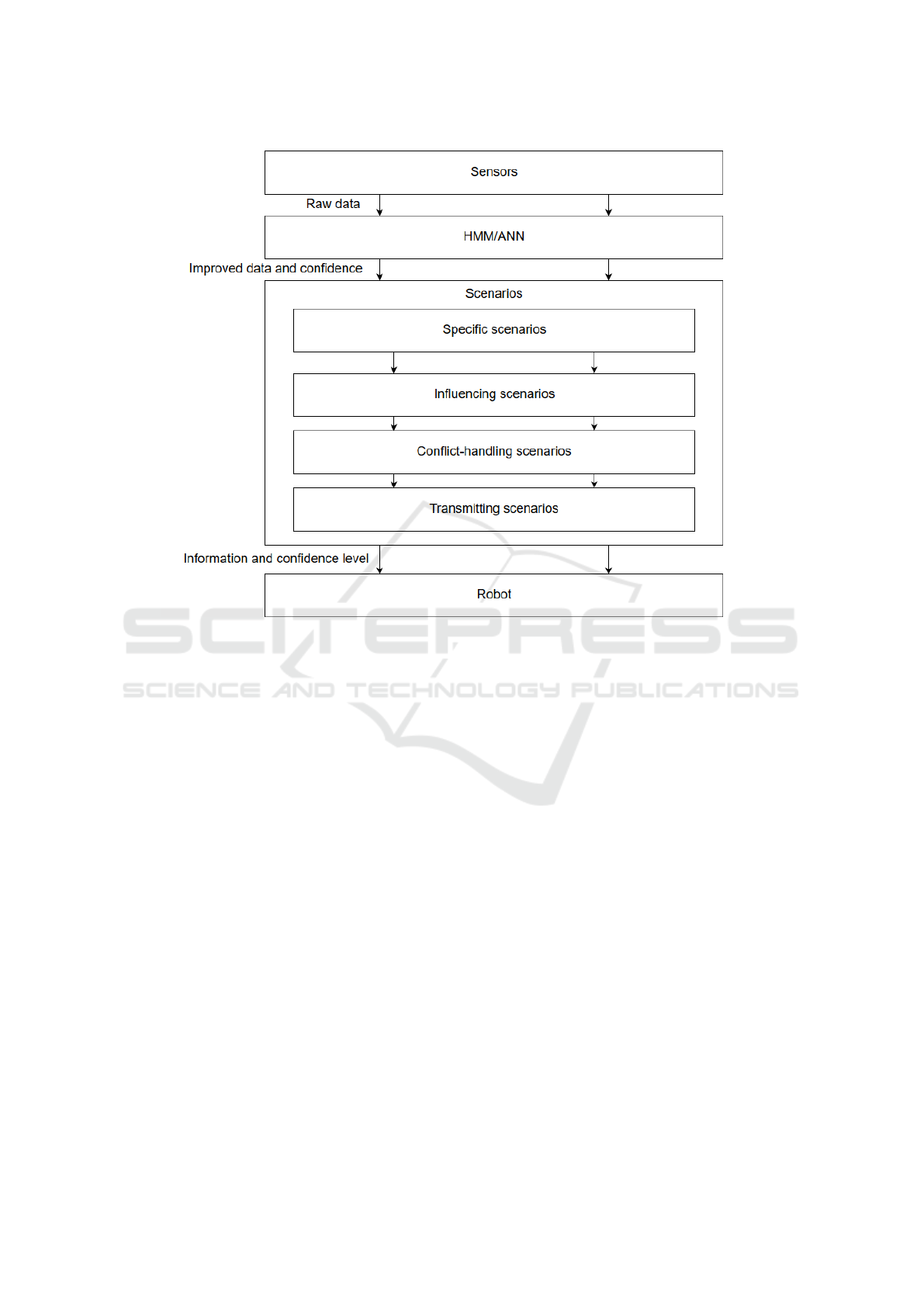
Figure 2: Scenario Flow.
tion tests are passed.
5. Rule generation
The rule generation part will be executed indepen-
dently whether the activation guards and condi-
tion checks were passed or not. I this section the
rule creates other rules in the engine or in some
cases just clones itself.
d a t a = g e t D a t a ( d a t a R e q u e s t ) ;
a c t i v a t e d = f a l s e ;
i f ( c h e c k A c t i v a t i o n G u a r d s ( ) ) {
a c t i v a t e d = t r u e ;
i f ( c h e c k C o n d i t i o n s ( ) ) {
e x e c u t e A c t i o n s ( ) ;
}
}
g e n e r a t e N e w R u l e s ( ) ;
d i s c a r d R u l e F r o m S y s t e m ( c u r r e n t R u l e ) ;
Figure 3: The algorithm to run a rule.
During an iteration of the PE, each rule is executed
one by one. The algorithm to execute a rule is pre-
sented in Fig. 3. The data acquisition part of the rule
is run first and if it fails none of the other parts of the
rule is executed. The rules can then be regrouped into
scenarios. Multiple scenarios can be run at the same
time and can trigger the activation of other scenarios
and rules.
4 SCENARIOS
In Fig. 2, the flow of the data in the system is de-
scribed. It gets first passed from the sensors of the
robot to our system where the classifiers assign a con-
fidence value to the sensors. It will then get passed on
to the rule-based system where the confidences will
get updated and the data will get improved using dif-
ferent scenarios. Finally, the data and confidence level
will get sent back to the robot. This section is dedi-
cated to the different types of scenarios running on the
rule-based engine.
4.1 Scenario Flow
1. Specific scenarios
During this step scenarios specifically designed
for a single sensor try to further improve the data
and/or confidence of the sensor.
Proactive Model for Handling Conflicts in Sensor Data Fusion Applied to Robotic Systems
471

2. Influencing scenarios
This is the first step in which context information
will be taken into account in order to adapt the
confidence of some sensors. Data coming from
some sensors as well as their confidence will be
used in order to compute the context and to decide
whether the confidence of related sensors should
be adapted.
3. Conflict-handling scenarios
In a third step, the system will solve the conflicts
that can occur between the data/information com-
ing from different sensors. Those conflicts can ei-
ther occur because the some sensors give data for
the same property (e.g.: distance to object based
on infrared and ultrasonic sensors) or because the
property that a sensor gives the data for can be
computed based on several other sensors (e.g. po-
sition). Based on the confidence attributed to the
sensors in the previous steps it will then be de-
cided which sensors to trust.
4. Transmitting scenarios
Finally the output information and confidence lev-
els coming from our system will then be trans-
ferred to the robot, either through the initial sen-
sor channels or through an additional virtual sen-
sor channel if the robot’s configuration allows it.
4.2 Implementation
In the system itself, the scenarios are implemented as
a set of rules. They can be put into 3 main categories.
1. Check for data
These rules check whether a Scenario has any data
to operate on and triggers the next rules in the sce-
nario if this is the case. The skeleton for these
rules is generic for which the pseudo code can be
seen in Fig. 4.
2. Computation
These rules are specific for every step described in
the previous section and can be very different de-
pending on the step, sensor and property they are
operating on. An example of a computation rule
is shown in Fig. 5 which computes how the con-
fidence of an infrared sensor is changed based on
the amount of light around the robot which could
potentially affect the accuracy of the infrared dis-
tance sensor.
3. Save data
These rules simply save the results from the com-
putation in an appropriate manner. The skeleton
for these rules is generic as well and the pseudo
code is shown in Fig. 6.
d a t a A c q u i s i t i o n ( ) {
d a t a E x i s t s = c h e c k D a t a E x i s t s ( s e n s o r
, p r o p e r t y , e x e c u t i o n n u m b e r ,
EXECUTION STEP ) ;
}
b o o l e a n a c t i v a t i o n G u a r d s ( ) {
r e t u r n d a t a E x i s t s ;
}
b o o l e a n c o n d i t i o n s ( ) {
r e t u r n t r u e ;
}
a c t i o n s ( ) {
t h i s . e x e c u t i o n n u m b e r ++;
}
b o o l e a n r u l e s G e n e r a t i o n ( ) {
ad d R ul e ( s e l f ) ;
s t a r t S c e n a r i o s ( e x e c u t i o n n u m b e r ,
EXECUTION STEP ) ;
r e t u r n t r u e ;
}
Figure 4: Generic check data rule.
4.3 Example
In this section, we are going to discuss an example
with multiple sensors that could lead to conflicting in-
formation, that need to be resolved. The situation is
the following: A GPS has been working correctly un-
til recently, but now it has started to malfunction giv-
ing a slightly inaccurate position as the GPS antenna
is coated in ice. The system executes its loop:
1. As the position is only slightly inaccurate, the
classifiers still attribute a high confidence value to
the GPS.
2. For the same reason, the specific sensor scenarios
do not detect that anything is wrong and do not
change the confidence value.
3. One of the influencing scenarios uses the temper-
ature sensor and camera, detects that the tempera-
ture is below 0 and that there might be snow and
because the confidences of these sensors are high
enough concludes that it might have an effect on
the GPS and thus updates the confidence of the
GPS by calling the updateConfidence() function
like shown in Fig. 5.
4. One of the conflict handling scenarios compares
the current values given by the GPS to a value cal-
culated based on the old position, speed, accelera-
tion and direction and detects that the discrepancy
ICSOFT 2019 - 14th International Conference on Software Technologies
472

d a t a A c q u i s i t i o n ( ) {
l i g h t d a t a = g e t D a t a ( ” l i g h t s e n s o r ” , ”
l i g h t l e v e l ” , e x e c u t i o n n u m b e r ,
EXECUTION STEP ) ;
i n f r a r e d d a t a = g e t D a t a ( ”
i n f r a r e d s e n s o r ” , ” d i s t a n c e ” ,
e x e c u t i o n n u m b e r ,
EXECUTION STEP ) ;
}
b o o l e a n a c t i v a t i o n G u a r d s ( ) {
r e t u r n t r u e ;
}
b o o l e a n c o n d i t i o n s ( ) {
r e t u r n g e t L i g h t L e v e l ( l i g h t d a t a )>
t h r e s h o l d ;
}
a c t i o n s ( ) {
i n f r a r e d c o n f i d e n c e = g e t C o n f i d e n c e (
i n f r a r e d d a t a ) ;
l i g h t c o n f i d e n c e = g e t C o n f i d e n c e (
l i g h t d a t a ) ;
l i g h t l e v e l = g e t L i g h t L e v e l (
l i g h t d a t a ) ;
n e w c o n f i d e n c e = u p d a t e C o n f i d e n c e (
i n f r a r e d c o n f i d e n c e ,
l i g h t c o n f i d e n c e , l i g h t l e v e l ) ;
ad d R ul e ( Sa v eR u le ( g e t V a l u e (
i n f r a r e d d a t a ) , ” i n f r a r e d s e n s o r
” , ” d i s t a n c e ” , n e w c o n f i d e n c e ,
e x e c u t i o n n u m b e r ,
EXECUTION STEP +1) ) ;
}
b o o l e a n r u l e s G e n e r a t i o n ( ) {
t h i s . e x e c u t i o n n u m b e r ++ ;
r e t u r n t r u e ;
}
Figure 5: Influencing rule.
between the two is above a threshold. As the GPS
confidence currently is quite low and the average
of the confidences of the sensors used to calculate
an estimated position is higher and every single
one of them is above a minimum threshold, the
values for the position given by the GPS are re-
placed by the calculated ones.
5. Finally the calculated values are passed to the
robot.
d a t a A c q u i s i t i o n ( ) {
}
b o o l e a n a c t i v a t i o n G u a r d s ( ) {
r e t u r n t r u e ;
}
b o o l e a n c o n d i t i o n s ( ) {
r e t u r n t r u e ;
}
a c t i o n s ( ) {
i n s e r t D a t a ( val u e , s e n s o r , p r o p e r t y ,
c o n f i d e n c e , e x e c u t i o n n u m b e r ,
EXECUTION STEP ) ) ;
}
b o o l e a n r u l e s G e n e r a t i o n ( ) {
r e t u r n t r u e ;
}
Figure 6: Save rule.
5 CONCLUSION
In this paper, we proposed a generic model for
context-based handling in sensor data fusion. In this
model, we use proactive scenarios running on a rule-
based engine in addition to of a layer of classifiers
in order to improve quality and the trust level of the
information that the robot finally uses to make his de-
cisions for reaching its objectives.
The proposed model takes the context of the robot
and its environment into account, which allows it to
better adapt to changes in the overall situation than
traditional sensor fusion techniques on their own.
6 FUTURE WORK
As some robots in the real world have to be able to
operate in different situations, in the next steps we
want to verify and validate different properties for our
generic model like robustness and resilience as these
properties are amongst the main ones requested for
these robots and are two important properties that our
model tries to provide them with respect to decision-
making based on multiple sensors data flows. These
properties can be tested by deliberately making sen-
sors fail or malfunction and checking whether the out-
put is correct. To allow us to have full control and
knowledge about the experiments, they will be done
in the simulation environment Webots. It also allows
us to generate the amount of data necessary to train
the first layer of the model.
Proactive Model for Handling Conflicts in Sensor Data Fusion Applied to Robotic Systems
473

REFERENCES
Akbari, A., Thomas, X., and Jafari, R. (2017). Automatic
noise estimation and context-enhanced data fusion of
imu and kinect for human motion measurement. In
2017 IEEE 14th International Conference on Wear-
able and Implantable Body Sensor Networks (BSN),
pages 178–182. IEEE.
Bader, K., Lussier, B., and Sch
¨
on, W. (2017). A fault toler-
ant architecture for data fusion: A real application of
kalman filters for mobile robot localization. Robotics
and Autonomous Systems, 88:11 – 23.
Bostanci, E., Bostanci, B., Kanwal, N., and Clark, A. F.
(2018). Sensor fusion of camera, gps and imu using
fuzzy adaptive multiple motion models. Soft Comput-
ing, 22(8):2619–2632.
Chen, Z., Tian, L., and Lin, C. (2017). Trust model of wire-
less sensor networks and its application in data fusion.
Sensors, 17(4):703.
Dempster, A. P. (1968). A generalization of bayesian infer-
ence. Journal of the Royal Statistical Society. Series
B (Methodological), 30(2):205–247.
Dobrican, R.-A., Neyens, G., and Zampunieris, D. (2016).
A context-aware collaborative mobile application for
silencing the smartphone during meetings or impor-
tant events. International Journal On Advances in In-
telligent Systems, 9(1&2):171–180.
Hide, C., Moore, T., and Smith, M. (2003). Adaptive
kalman filtering for low-cost ins/gps. The Journal of
Navigation, 56(1):143–152.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Transactions of the ASME–
Journal of Basic Engineering, 82(Series D):35–45.
Kordestani, M., Samadi, M. F., Saif, M., and Khorasani, K.
(2018). A new fault prognosis of mfs system using in-
tegrated extended kalman filter and bayesian method.
IEEE Transactions on Industrial Informatics, pages
1–1.
Nemra, A. and Aouf, N. (2010). Robust ins/gps sensor fu-
sion for uav localization using sdre nonlinear filtering.
IEEE Sensors Journal, 10(4):789–798.
Neyens, G. (2017). Conflict handling for autonomic sys-
tems. In 2017 IEEE 2nd International Workshops on
Foundations and Applications of Self* Systems (FAS*
W), pages 369–370. IEEE.
Neyens, G. and Zampunieris, D. (2017). Using hid-
den markov models and rule-based sensor media-
tion on wearable ehealth devices. In Procedings of
the 11th International Conference on Mobile Ubiqui-
tous Computing, Systems, Services and Technologies,
Barcelona, Spain 12-16 November 2017. IARIA.
Neyens, G. I. F. and Zampunieris, D. (2018). A rule-based
approach for self-optimisation in autonomic ehealth
systems. In ARCS Workshop 2018; 31th Interna-
tional Conference on Architecture of Computing Sys-
tems, pages 1–4. VDE.
Salovaara, A. and Oulasvirta, A. (2004). Six modes of
proactive resource management: a user-centric typol-
ogy for proactive behaviors. In Proceedings of the
third Nordic conference on Human-computer interac-
tion, pages 57–60. ACM.
Sasiadek, J. and Wang, Q. (1999). Sensor fusion based on
fuzzy kalman filtering for autonomous robot vehicle.
In Robotics and Automation, 1999. Proceedings. 1999
IEEE International Conference on, volume 4, pages
2970–2975. IEEE.
Shafer, G. (1976). A Mathematical Theory of Evidence.
Princeton University Press.
Shirnin, D., Reis, S., and Zampunieris, D. (2012). Design of
proactive scenarios and rules for enhanced e-learning.
In Proceedings of the 4th International Conference on
Computer Supported Education, Porto, Portugal 16-
18 April, 2012, pages 253–258. SciTePress–Science
and Technology Publications.
Tennenhouse, D. (2000). Proactive computing. Communi-
cations of the ACM, 43(5):43–50.
Tom, K. and Han, A. (2014). Context-based sensor selec-
tion. US Patent 8,862,715.
Turan, M., Almalioglu, Y., Gilbert, H., Araujo, H., Cemgil,
T., and Sitti, M. (2018). Endosensorfusion: Particle
filtering-based multi-sensory data fusion with switch-
ing state-space model for endoscopic capsule robots.
In 2018 IEEE International Conference on Robotics
and Automation (ICRA), pages 1–8. IEEE.
Yazdkhasti, S. and Sasiadek, J. Z. (2018). Multi sensor
fusion based on adaptive kalman filtering. In Ad-
vances in Aerospace Guidance, Navigation and Con-
trol, pages 317–333, Cham. Springer International
Publishing.
Zampunieris, D. (2006). Implementation of a proactive
learning management system. In Proceedings of” E-
Learn-World Conference on E-Learning in Corporate,
Government, Healthcare & Higher Education”, pages
3145–3151.
Zampunieris, D. (2008). Implementation of efficient proac-
tive computing using lazy evaluation in a learning
management system (extended version). International
Journal of Web-Based Learning and Teaching Tech-
nologies, 3:103–109.
ICSOFT 2019 - 14th International Conference on Software Technologies
474
