
An Innovative Automated Robotic System based on Deep Learning
Approach for Recycling Objects
Jaeseok Kim, Olivia Nocentini, Marco Scafuro, Raffaele Limosani, Alessandro Manzi, Paolo Dario
and Filippo Cavallo
The Biorobotics Institute, Sant’Anna School of Advanced Studies, Viale Rinaldo Piaggio, Pontedera, Pisa, Italy
Keywords:
Image Processing, Manipulation, Grasping, Deep Learning, Classification of Materials, Recycling System.
Abstract:
In this paper, an industrial robotic recycling system that is able to grasp objects and sort them according to
their materials is presented. The system architecture is composed of a robot manipulator with a multifunctional
grasping tool, one platform, a depth and an RGB camera. The innovation of this work consists of integrating
image processing, grasping, motion planning and object material classification to create a new automated
recycling system framework. An efficient object recognition approach is presented that uses segmentation
and finds grasping points to properly manipulate objects. A deep learning approach was also used with a
modified LeNet model for waste objects classification, sorting them into two main classes: carton and plastic.
Image processing and classification were integrated with motion planning that is used to move the robot with
optimized trajectories. To evaluate the system, the success rate and the execution time for grasping and object
classification were computed. In addition, the accuracy of the network model was evaluated. A total success
rate of 86.09% and 90% was obtained for carton and plastic samples grasped using suction, while 86.67% and
78.57% using gripper. In addition, a classification accuracy of 96% was reached on test samples
1 INTRODUCTION
Nowadays, robotics has widely been developed in
various fields (Bostelman et al., 2016). In particu-
lar, the industrial robotics is rapidly growing up to
increase productivity and a new industrial paradigm
as industry 4.0 is emerging (Lu, 2017). The goal of
industry 4.0 is to reach a higher level of automation
efficiently. Many industrial robotic applications (Lu,
2017) have been developed such as smart city, smart
transportation, smart factory and etc. Especially, in
order to build a smart city, several key technologies
should be enhanced to improve the quality of human
life. One of them is to develop an automated waste
recycling system that could improve the quality of
human life and protect the environment (Gundupalli
et al., 2017).
Automated waste recycling system requires high
functionalities such as object detection, object classi-
fication, motion planning and etc. In addition, com-
plex manipulation scenario is necessary to develop the
system. In order to develop a recycling system, all
these functionalities should be integrated and each of
them should be communicated with the others. How-
ever, the development of them is still an issue and in
Figure 1: Robotic recycling system using a multifunctional
grasping tool.
industrial environment considering also the interac-
tion between workers and the robotic system.
In this paper, a system for recycling waste objects
automatically was developed. For developing the sys-
tem, a four major problem domains was considered:
1) object perception, 2) object classification, 3) mo-
tion planning with a multifunctional grasping tool and
4) integration of all components to obtain a reliability
and acceptability industrial robotic system. The main
contributions of this paper are the following:
• An efficient object recognition system is pre-
Kim, J., Nocentini, O., Scafuro, M., Limosani, R., Manzi, A., Dario, P. and Cavallo, F.
An Innovative Automated Robotic System based on Deep Learning Approach for Recycling Objects.
DOI: 10.5220/0007839906130622
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 613-622
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
613

sented that applies clustering and segmentation
of waste objects, using a depth camera. It also
supports grasping point detection and grasp affor-
dance estimation for distinguishing objects using
a multifunctional grasping tool.
• A deep learning approach is introduced with a
modified LeNet model to classify materials of
the wastes. This model can classify the objects
into two main categories: plastic and carton. A
dataset for training the model was collected and
augmented applying rotation and illumination to
the original dataset.
• A motion planning was applied to generate trajec-
tories optimized for robot’s arm movements and
configure a proper pose of the multi-functional
grasping tool. Moreover, motion planning was
used to pick and place objects for recycling wastes
in a specific area.
• Object perception, manipulation and object clas-
sification were integrated as main functionalities
of a new automated recycling system framework.
In summary, the originality of the proposed sys-
tem is to create an automated recycling system that
not only picks the objects but also classifies them with
multifunctional grasping tool using a deep learning
approach.
2 RELATED WORK
In this section, works related to recycling system were
reviewed, which covers three areas of interest: image
processing, grasping, and classification of materials.
2.1 Image Processing using Depth
Camera
Depth sensors are widely used to perceive a variety
of environments and they are used to measure the dis-
tance data from a sensor to an object visualizing them
using point cloud data (Masuta et al., 2016).
2.1.1 Point Cloud Data and Acquisition
Point cloud data is a collection of data points defined
by a given 2D or 3D coordinates system and colour
information. Point cloud becomes a common tech-
nique for image processing because it is easy to vi-
sualize and more accurate than traditional image pro-
cessing techniques (Nurunnabi et al., 2012). More-
over, this method is often the only possible primitive
for exploring shapes in higher dimensions (Donoho
and Grimes, 2003), (Tenenbaum et al., 2000). An-
other benefit of this technique is to reduce computa-
tional time; in (Lei et al., 2017), Lei et al. used point
cloud data acquired from a 3D camera justifying their
choice as the fastest grasping approach.
Point cloud uses segmentation to process data; this
technique is defined as the process of classifying point
clouds into multiple homogeneous regions and this is
helpful for analyzing the scene in various aspects such
as locating and recognizing objects, classification,
and feature extraction (Nguyen and Le, 2013), (Thi-
lagamani and Moorthi, 2011). In (Vo et al., 2015),
Vo et al. proposed an octree-based region growing
algorithm for fast and accurate segmentation of ter-
restrial and aerial LiDAR point clouds. In (Ni et al.,
2017), Ni et al. used segmentation method to pro-
cess the acquired images. Based on the state of the
art, we propose an approach that uses segmentation to
decompose 3D data into meaningful regions function-
ally.
2.2 Grasping Strategy
The goal of this system is to robustly grasp objects
without relying on their object identities or poses.
As concern the grasping part, Principal Component
Analysis (PCA) was used to choose the grasping tools
(suction or gripper) to pick the objects, according to
their dimensions. PCA is a standard tool in modern
data analysis and it represents a simple method for ex-
tracting relevant information from confusing data sets
(Xiao et al., 2013). PCA was used, in (Cruz et al.,
2012) to accelerate the grasping process of unknown
objects: a single-view partial point cloud was con-
structed and grasp candidates were allocated along the
principal axis. In (Adnan and Mahzan, 2015), Adnan
et al. used PCA in the grasping process to reduce the
dimensional dataset of hand motion as well as mea-
suring the capacity of the fingers movement. Another
use of PCA is shown in (Dai et al., 2013), where the
authors introduced a new PCA grasping motion anal-
ysis approach that captured correlations among hand
joints and represented dynamic features of grasping
motion with a low number of variables. The use of
PCA in different grasping situations brought us to
adopt this technique in the grasping part of our work.
2.3 Object Classification for Recycling
The environmental health in the world is bad influ-
enced by an improper waste recycling management
(Chu et al., 2018). To solve the problem, automated
sorting and recycling waste materials system have
been broadly investigated (Gundupalli et al., 2017).
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
614

In particular, the classification of industrial wastes is
one of the core functions to develop the system. The
recent search has proposed recycling system that has
been widely developed based on computer vision and
the use of deep learning algorithms for classifying
waste materials. In (Simonyan and Zisserman, 2014)
is highlighted and experimentally demonstrated how
very deep convolutional networks can reach a high
classification accuracy for large-scale image classi-
fication and can generalize well to a wide range of
tasks and datasets. Awe et al. (Awe et al., 2017)
used a faster R-CNN model, an object detection net-
work with Region Proposal Networks (RPNs), in or-
der to classify waste into three categories: paper, re-
cycling and landfill. Rad et al. (Rad et al., 2017)
have developed a computer vision based system for
classification and localization of waste on the streets
using GoogLenet. In particular, they had a signifi-
cant improvement in classification accuracy splitting
a class in two similar classes: leaves class and piles of
leave class. This kind of approach allowed to perceive
leaves grouped together and guaranteed a better gen-
eralization in classifying leaves. Mittal et al. (Mittal
et al., 2016) introduced an android app, SpotGarbage,
which uses an AlexNet model to detect and localize
garbage in images. Based on the paper, a CNN net-
work was designed with a modified LeNet model and
training set, which has not complex images. It can
classify waste objects in two main categories: carton
and plastic.
3 SYSTEM ARCHITECTURE
The goal of this work is to develop a robotic recycling
system that will be able to grasp objects in the ac-
tual environment and will be able to sort them accord-
ing to their materials (carton or plastic). A Microsoft
Kinect was attached under the platform and this sen-
sor is used to process the point clouds. After the im-
age processing, objects are grasped using UR5 robot
arm with the grasping tools (Robotiq gripper and one
big suction). Then, the objects are brought in front of
an RGB camera that classifies them according to their
material. Last, the objects that have to be recycled are
collected in a box placed near the manipulator (see
Figure 2). To develop the whole process described
above, a platform was created to support the manipu-
lator and to delimit its movements for safety reasons.
Figure 2: System structure composed of three phases: 1)
Image processing, 2) Grasping and manipulation phase and
3) Classification of materials.
4 SYSTEM DESCRIPTION
This system can be divided into the following pro-
cesses: a) image processing, b) grasping point detec-
tion, c) object material classification, d) motion plan-
ning.
In the proposed scenario, the Kinect camera ac-
quires data as point cloud and processes them in or-
der to obtain clusters representing each object inside
the box. Then, the manipulator plans the optimal path
to reach each object and chooses the grasping strat-
egy between gripper and suction, according to the di-
mensions of the object grasped. After the grasping
process, a modified LeNet model is trained to recog-
nize the material of an object. The net classifies the
objects more suitable between carton and plastic ex-
tracting their features with the RGB camera.
After material recognition, the object is moved to
a delivery box by the arm (UR5 Manipulator) placed
outside the structure. In details, two different deliv-
ery boxes were used: one that collects carton and the
other one for plastic (see Figure 3).
4.1 Object Segmentation
In this work, the data acquired from the Kinect as
point clouds were processed using the Point Cloud
Library (PCL). PCL is first of all an open project for
2D/3D images and point cloud processing and in ad-
dition contains numerous state-of-the-art algorithms
including filtering, feature estimation, surface recon-
struction, model fitting, and segmentation (Rusu and
Cousins, 2011). The data collected as point clouds
are processed in order to extract the shapes of the ob-
An Innovative Automated Robotic System based on Deep Learning Approach for Recycling Objects
615
suction = true
gripper = false
suction = false
gripper = true
no
yes
no
yes
Depth data
centroid of each cluster
normal of the plane
Image
Processing
End of the
process
Motion planning
for suction
Initialization
Object
classification
Max number of
iteration reached
Motion planning
for
plastic delivery
Motion planning
for
carton delivery
Grasping
strategy
Success
Motion planning
for gripper
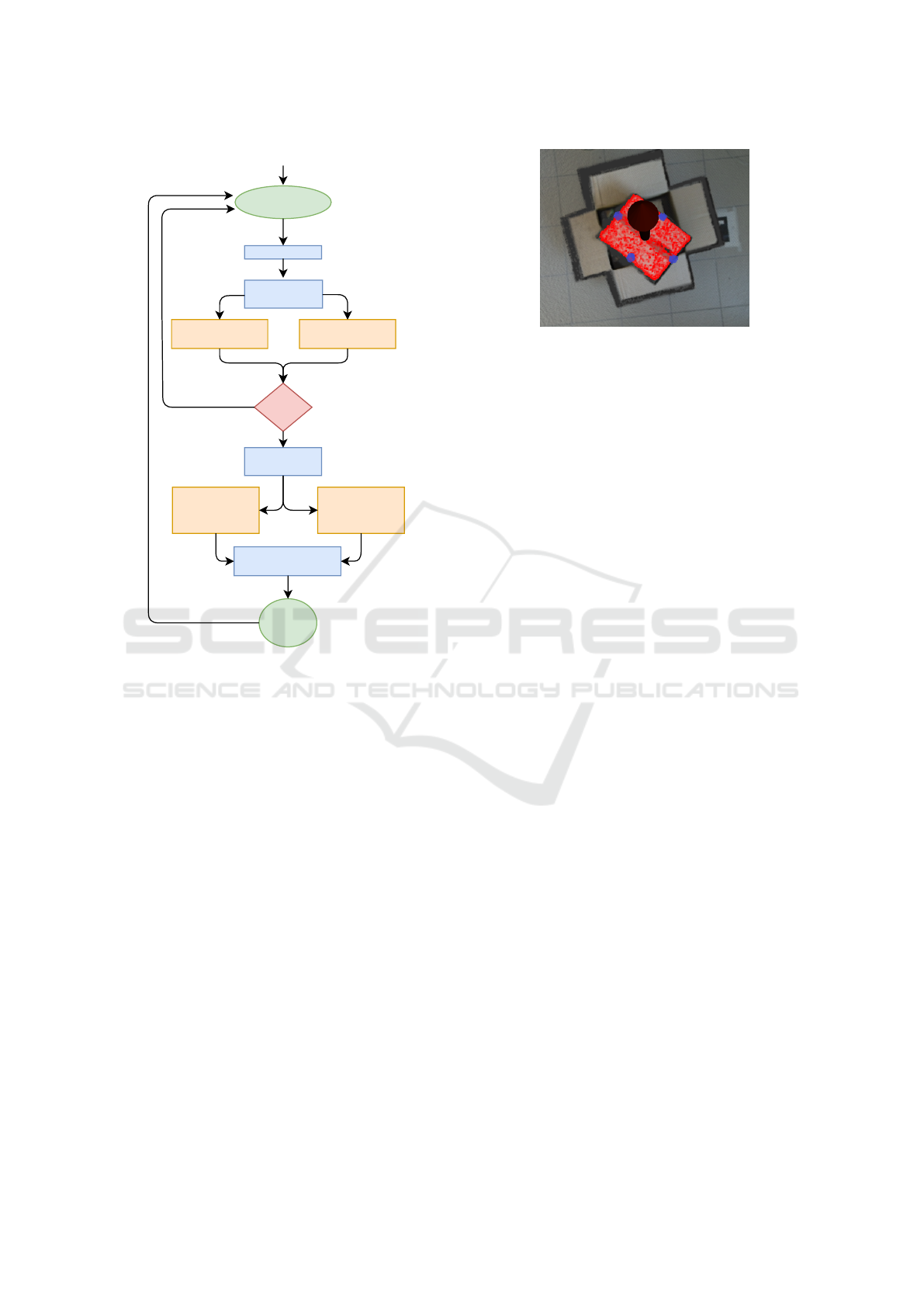
Figure 3: Flow chart of the robotic recycling system; It in-
cluded image processing, grasping strategy object classifi-
cation and motion planning.
jects that have to be recycled. In details, the image
processing of these data is divided into the follow-
ing steps: a) acquisition of data-set as point clouds,
b) workspace filtering, c) clustering objects, d) plane
model segmentation, e) extraction of the highest point
of the object and normal of the plane. At first 3D point
cloud data were acquired from the Kinect, attached to
a support linked to the structure. After data acqui-
sition, the workspace was set and three pass-through
filters were implemented along the camera axis. The
first one was applied along the z-axis of the camera
frame in order not to detect the mobile platform as an
object that had to be grasped. Then two other filters
were applied, which set the x and y axes of the Kinect
workspace to avoid the detection of the edges of the
structure.
After the filtering process, clustering and seg-
mentation processes were employed to take over
each object of the scenario. Different methodolo-
gies have been suggested for 3D point cloud seg-
mentation. They can be categorized into five classes:
edge based methods, region-based methods, attributes
Figure 4: Image processing applied to an object. In red
clustering and visualization of the normal and in blue PCA
points are shown.
based methods, model-based methods, and graph-
based methods (Nguyen and Le, 2013). In this work,
a model-based method, that makes use of geometric
primitive shapes for grouping points was employed;
in details, a plane based model for the picking part
was chosen. The main reason behind this choice has
been that this model was shown as the most appropri-
ate to extract a good surface for the grasping. More-
over, a plane model based is a very suitable choice be-
cause planes are one of the most important primitives
since man-made structures mainly consist of planes,
(Feng et al., 2014), (Xiao et al., 2013). Then, for each
plane, the z coordinate of the highest point, and cen-
troid x and y coordinates were sent as a goal state for
the manipulation planning of the UR5 and the orien-
tation of the plane was used to adapt to object shape
using gripper/suction. The z-axis of the highest point
was used instead of the centroid of the plane to pre-
vent crashing the sample from the end-effector dur-
ing grasping. If we had used the centroid, the robot
would have pressed too much the sample and both of
them would have damaged. Then, in order to work
with world frame, points were converted from camera
frame (see Figure 4).
4.2 Grasping Objects using Principal
Component Analysis
The goal of the system is to perform robust grasp-
ing operations without predefined grasping pose esti-
mation. To better achieve this goal,a multifunctional
end effector was created that can use both suction and
gripper tools. A similar end effector that had a re-
tractable mechanism that enables quick and automatic
switching between suction and gripper modalities was
also used in (Chu et al., 2017) for recognizing and
grasping objects. PCA was used in order to select the
most suitable grasping tool, base on the size of the
object. This technique finds the dimensions of the ob-
jects and compares them with the opening of the grip-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
616

Figure 5: Convolutional neural network architecture for the classification of materials. The two outputs are for the probability
of carton and plastic.
per: if the dimensions of the objects are bigger than
the width of the gripper, we used suction, otherwise,
we used gripper (see Figure 4).
4.3 Classification System
The goal of the proposed classification system is to
separate waste objects in two different classes, after
they have been picked up and positioned in front of an
RGB camera. The chosen approach consists in recog-
nizing and classifying each object separately in order
to improve classification accuracy.
Based on (LeCun et al., 1998), a modified LeNet
5 model was developed that works with RGB im-
ages of 150x150 pixels as inputs (that are substan-
tially bigger than the ones usually used for character
recognition by standard LeNet models) and the out-
put was modified as two classes. The first two con-
volutional layers learn 32 and last convolutional layer
learns 64 filters, where each filter has size 3 x 3. Each
convolutional layer is followed by the ReLU activa-
tion function and by a 2 x 2 Max-Pooling in both
the x and y direction with a stride of 1. In order to
avoid overfitting, regularization was applied choosing
a dropout term of 0.5 after the first dense layer of 64
units. After another ReLU activation function, there
is the last dense layer with 2 units, that are the num-
ber of the class labels in which the waste classifica-
tion is performed. The proposed model was trained
over a manually labeled dataset of normalized RGB
images of the waste objects, with pixels values rang-
ing from 0 to 1. The optimization algorithm used was
stochastic gradient descent with learning rate of 0.01.
Categorical-crossentropy, also called Softmax Loss,
was selected as loss function (1):
−
1
N
N
∑
i
y
i
log ˆy
i
+ (1 − y
i
)log(1 − ˆy
i
)
(1)
The output of the trained CNN is represented with a
probability over the 2 classes from an input image.
4.4 Motion Planning for Grasping
Objects
For decades, motion planning has been developed for
discovering optimal robot movement. In particular,
Kinematics and Dynamics Library (KDL) and Open
Motion Planning Library (OMPL) are broadly used
to search movements of a robot arm. In ROS, Mo-
tion Planning Framework (Moveit!) (Chitta et al.,
2012) was integrated with these libraries as plug-
ins in the system architecture so that it can sup-
port self-collision avoidance with inverse kinemat-
ics to determine the feasibility of grasp. Moveit!
also can generate several possible paths to reach the
goal with sampling-based planning. In this work, be-
fore using Moveit!, collision areas were configured
in URDF (the standard robot description format in
ROS), to avoid crashing between obstacles and robot
arm. Moreover, specific positions such as delivery
places, initial robot arm position and etc. were de-
fined in Semantic Robot Description Format (SRDF).
During motion planning, it was allowed to apply re-
planning process because it supports searching more
optimal path compared to the previous one generated.
Furthermore, we used trajectory following method,
which generates waypoints between the arm and goal
that could avoid collisions and maintain defined end
effector pose constantly.
(a)
(b)
Figure 6: Total 30 samples (cartons and plastics) were pre-
pared to test the recycling system.
5 EXPERIMENTAL SETUP
In this section, the experimental setup that is needed
to demonstrate our system will be explained. A new
An Innovative Automated Robotic System based on Deep Learning Approach for Recycling Objects
617

Kinect2
RGB camera
Trash can
Workspace
Suction
Gripper
UR5 robotic arm
Figure 7: Experimental setup for the recycling system com-
posed of five elements: UR5 manipulator, RGB and Kinect
cameras, grasping tools, workspace, and trash can.
robotic platform is introduced, the procedure to col-
lect the dataset is described, and the system is initial-
ized. For the experiment, evaluation scenarios were
organized.
5.1 Hardware System Description
The proposed robotic platform was developed to build
a robotic recycling system during CENTAURO Re-
gional Project - iSort (2016 - 2018). It consists of
one cage with four steel bars, a robot arm (UR5), a
depth camera (Microsoft Kinect v2), a Robotiq two-
finger gripper, two suction cups (small and big) and
a Logitech mono camera. The system was organized
to allow implementation of major functionalities that
recognize waste objects and classify them according
to their material (see Figure 7).
The experimental setup was considered to build
as one in the actual industrial environment. However,
due to the safety issues with limited space, we could
not build the same as one in the environment. More-
over, operation speed was reduced because of the pro-
tection of robot and human.
5.2 Collecting the Dataset
Before collecting images for the training part, infor-
mation of cartons and plastics were recorded by a we-
bcam mounted from different angles. Image frames
were extracted automatically using ROS bag func-
tionality. The dataset collected is composed of a to-
tal of 105 sample images, which are 51 carton and
54 plastic samples. However, the dataset had really
few samples to exploit the real power of the CNNs.
In order to overcome the limitation of training exam-
ples, data augmentation was applied to the training
examples with a number of random transformations.
As a result, the dataset increased the number of train-
ing samples (total 3002 samples) and never see twice
the exact same images. This method helps to prevent
overfitting and support the CNN model to generalize
the situations that can be found in the actual environ-
ment. The augmented dataset will be publicly avail-
able
1
.
(a)
(b)
(c) (d)
8.0cm
18.0cm
16.0cm
5.0cm
Figure 8: Object configurations for testing was selected
based on material and its height (z-axis). (a) An short car-
ton (SC), (b) An tall carton (TC), (c) An voluminous plastic
(VP), (d) A non voluminous plastic (NVP).
5.3 System Initialization
The robot arm installed on the steel plate was placed
out of workspace to be totally visible on depth camera
system (Figure 1). Workspace was set in the middle
of a platform with the four steel bar and it was placed
on approximately 40 cm from the bottom; this posi-
tion was considered an easy one to grasp objects. For
object classification, a RGB camera was installed in
front of the robot arm’s initial position. Two boxes
were prepared to collect waste objects from delivery
of the arm. The arm initial position, the camera posi-
tion for classification and the boxes for trash can po-
sitions were predefined during the recycling system
operation. For the experiment, a set of total 30 ob-
jects (Figure 6) composed of 50% of carton and plas-
tic was prepared to perform the following tests: grasp
an object using a multifunctional grasping tool (suc-
tion and gripper) and classify object materials. In ad-
dition, if one carton was tested with different object
configurations (Figure 8), it was counted as two sam-
ples. Moreover, if intuitively a grasping tool could
not operate picking an object, the object was removed
using the specific tool (e.g: if width of carton or plas-
tic materials are bigger than gripper’s width or thinner
than suction’s width).
The network was trained using 60% and 20% of
the dataset as training set and validation set, and the
remaining 20% as test set. The training process was
1
The dataset will be released on github:
https://github.com/Alchemist77/Centauro Project
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
618

stopped after 250 epochs. The Stochastic gradient de-
scent (SGD) was used as the optimizer to minimize
the loss function. The batch size during training was
of 16 elements and learning rate was 0.01. The net-
works were implemented using Keras with Tensor-
flow frameworks (Abadi et al., 2016)
5.4 Evaluation Scenarios
To evaluate the system, we measured the success rate
and the execution time for grasping objects and ob-
ject classification. In order to obtain the success rate
for grasping objects, firstly a waste object (carton or
plastic) was placed on the workspace letting the arm
grasp it for 5 repetition trials without human interven-
tion. To evaluate the performance of the success rate,
the percentage of the number of trials was calculated:
G
s
=
G(r)
5
100(%), r = 1, . . . , N
r
, (2)
where G
s
represents success rate, G(r) is defined as
the number of success at repetition r, and N
r
= 5 is
the number of repetitions during grasp process. The
success rate of object classification has the same cal-
culation procedure.
To measure the execution time for grasping ob-
jects and object classification processes, different ini-
tial states were proposed. For grasping objects pro-
cess, object segmentation and clustering with motion
planning were considered. In contrast, the object clas-
sification process started from the grasping of the ob-
ject and the measurement ended when CNNs visual-
ized the output of object material.
In addition, the different configuration of the
shape of an object was considered during the evalu-
ation of the two processes above.
6 EXPERIMENTAL RESULTS
In this section, system results are shown analyzing
first the success rate obtained for grasping and clas-
sification and then the execution time for each task.
Furthermore, network performances in terms of loss
and accuracy are discussed.
6.1 Success Rate
Tables 1 and 2 show the results obtained from grasp-
ing using suction (Figure 9a) and gripper (Figure 9b)
respectively. Both tables are divided into 4 subgroups
according to objects material and objects physical
properties.
(a)
(b)
Figure 9: Experiments for grasping objects using the mul-
tifunctional tool. (a) Grasping an object using suction, (b)
Grasping an object using gripper.
(a) (b)
Figure 10: Experiments for classification of objects with
text sign. (a) carton classification (b) plastic classification.
First, a trial with grasping cartons was done us-
ing suction with 12 short carton (SC) and 9 tall carton
(TC) samples (Figure 8 (a and b)) and each object was
tested for five times. The same approach was used for
plastic samples (4 voluminous plastic (VP) and 6 non-
voluminous plastic (NVP) samples (Figure 8 (c and
d))). The results show that suction has better perfor-
mance with plastic (90% success rate) than with car-
ton (86,09%). The main problem of grasping carton
was to relate on the dimensions of the object: if the
object was too thin, then the suction couldn’t reach
the grasping point because the segmentation could
not find the object. When the object was too high
there was the problem that the suction crashed be-
cause there was too much pressure on the tool. Other
issues happened due to mechanical problems of the
manipulator, the presence of holes and discontinuities
(a)
(b)
Figure 11: Examples of failed classification of objects. (a)
carton classification (b) plastic classification.
An Innovative Automated Robotic System based on Deep Learning Approach for Recycling Objects
619

Table 1: Success rate of grasping objects using suction.
Category Object configuration
Number of
objects
Number of
attempts
Number of
successes
Total
success rate
Carton
SC 12 70 62/70 (88.57%)
99/115 (86.09%)
TC 9 45 37/45 (82.22%)
Plastic
VP 4 20 18/20 (90%)
45/50 (90%)
NVP 6 30 27/30 (90%)
Table 2: Success rate of grasping objects using gripper.
Category Object configuration
Number of
objects
Number of
attempts
Number of
successes
Total
success rate
Carton
SC 5 25 21/25 (84%)
65/75 (86.67%)
TC 10 50 44/50 (88%)
Plastic
VP 5 25 19/25 (76%)
55/80 (68.75%)
NVP 11 55 36/55 (65.45%)
Table 3: Success rate of object classifications.
Category Object configuration
Number of
objects
Number of
attempts
Number of
successes
Total
success rate
Carton
SC 6 30 30/30 (100%)
85/100 (85%)
TC 14 70 55/70 (78.57%)
Plastic
VP 7 35 30/35 (85.71%)
86/100 (86%)
NVP 13 65 56/65 (86.15%)
in the surface of objects and the presence of scotch
tape in some parts of the carton samples. As regard
to plastic samples, segmentation problems were oc-
curred due to the flexible surface of plastic and due to
some breakage of plastic during suction operation.
As regard to the grasping part using gripper, the
results present the opposite situation: carton samples
have a better performance (86.67%) than plastic sam-
ples (68.75%). The limitation of workspace is the
main problem of grasping. In addition, rotational joint
mechanical limitations blocked the robot or brought
the manipulator to hit the object. Other two minor
problems encountered were the wrong segmentation
of an object and the height of a sample (if the object
was too high, the gripper crashes).
Summarizing, from the experimental stage was
understood that the best situation happened when
plastic was taken using suction; on the contrary, plas-
tic samples were discovered to be the worst samples
to grasp using gripper.
Concerning the classification part, Table 3 shows
the results obtained from classification experiments
(Figure 10a and 10b). The percentage of success rate
obtained for carton and plastic samples are quite simi-
lar: plastic samples have a slightly higher success rate
(86%) than carton samples (85%). Both percentages
are quite high and are similar to the success rates of
the grasping experiments. The problems met during
classification experiments were due to the colour of
the samples. White and light blue cartons were de-
tected as plastic due to the similarity of these colours
with plastic colours (Figure 11a). A plastic bag was
seen, instead, as a carton and these wrong classifica-
tion happened because this object was grasped even if
it was not part of the original dataset. The presence of
the sunlight also affected the success of classification
as it occurred for the packaging material (Figure 11b).
Figure 12: Visualization of execution times for grasping and
classifying objects.
6.2 Execution Time
Figure 12 shows the execution time during classifi-
cation and grasping tasks using gripper and suction
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
620
respectively. Firstly, the time for grasping object is
different, based on the grasping tool used: the mean
value (26.50s) using suction is less than the one ob-
tained with gripper (33.19s), therefore suction process
is more fast. Also, standard deviation (SD) with suc-
tion (1.72s) is higher than SD as regarding of gripper
(7.33s). Suction grasping performances are simpler
and easier obtained compared to the ones using grip-
per. On the contrary, when the arm uses gripper, the
variability of the execution time increased because ex-
tra processes were operated to detect the object high-
est point: robot adapts the end effector orientation in
order to grasp the object. With regard to classification
part, mean value using both tools (suction: 17.57s and
17.76s) are comparable. Moreover, SD using gripper
(1.05S) and suction (1.06s) are not substantially dif-
ferent because the trajectories, which to the camera
for classification were already predefined.
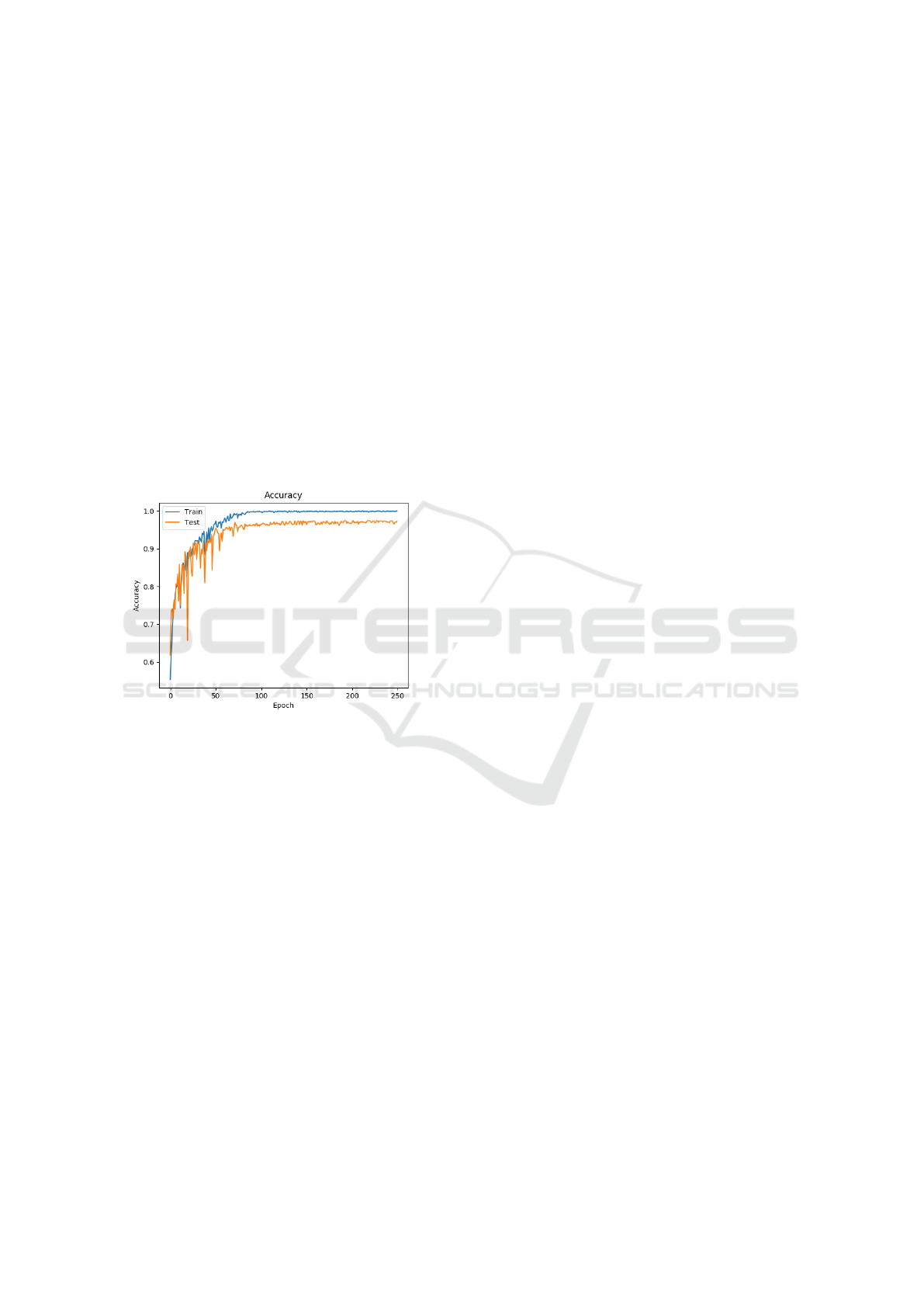
Figure 13: Accuracy value evaluation during 250 epochs for
training and test (blue and orange solid lines).
6.3 Train and Test Set Results,
Accuracy and Loss
In Figure 13 is showed the performance of the net-
work in terms of accuracy, on training and test sets
during 250 epochs. In blue and orange respectively,
the accuracy of the network on training and test
phases is represented. Accuracy reaches the value of
0.99 during training and 0.96 in the test phase. In par-
allel the optimizer algorithm leads loss to converge to
a loss function of 0.01 in training phase and 0.08 in
the test phase. Therefore, the model can perform and
generalize well on new data and it is not affected by
overfitting.
7 DISCUSSION AND
CONCLUSION
In this work, the development of an autonomous
robotic system was presented. This system is able to
grasp objects and sort them according to their mate-
rial compositions (carton or plastic), in order to fos-
ter recycling practices in industries. The mainly nov-
elties of this work are two: building a preliminary
framework for benchmarking industrial applications
in sorting management and integrating functionalities
as image processing, motion planning, grasping and
classification in a unique robotic structure. Another
challenging aspect of this work is the use of a mul-
tifunctional end effector equipped with both gripper
and suction tools; this multifunctionality increased
the success rate during the grasping process, reduc-
ing the probability of error. During the experiments,
only the bigger suction was used. For future work,
both types of suction will be applied for selecting the
right one, according to the object dimensions. A lim-
itation of the proposed work was that we did not con-
sidered grasping in cluttered environments. For this
reason, this grasping part could be a challenging field
to analyse in the future (ten Pas et al., 2017). An-
other issue of this work concerns the dataset: orig-
inal dataset should be integrated in order to have a
large-scale dataset, allowing the classification system
to more generalize on new objects, furthermore a new
approach based on learning more features should be
found, to have a better classification of materials (Si-
monyan and Zisserman, 2014) . Finally, another chal-
lenging idea could be handling a greater variety of
objects and new groups of material like glass and or-
ganic would generalize an automated recycling sys-
tem completely. (Zeng et al., 2017).
ACKNOWLEDGEMENT
This work was supported by the Tuscany’s regional
research project CENTAURO: Colavoro, Efficienza,
preveNzione nell’industria dei motoveicoli mediante
Tecnologie di AUtomazione e RObotica. bando FAR-
FAS 2014.
REFERENCES
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A.,
Dean, J., Devin, M., Ghemawat, S., Irving, G., Isard,
M., et al. (2016). Tensorflow: A system for large-
scale machine learning. In 12th {USENIX} Sympo-
An Innovative Automated Robotic System based on Deep Learning Approach for Recycling Objects
621

sium on Operating Systems Design and Implementa-
tion ({OSDI} 16), pages 265–283.
Adnan, N. H. and Mahzan, T. (2015). Gesture recognition
based on human grasping activities using pca-bmu.
Gesture, 6(11).
Awe, O., Mengistu, R., and Sreedhar, V. (2017). Smart
trash net: waste localization and classification. arXiv
preprint.
Bostelman, R., Hong, T., and Marvel, J. (2016). Survey
of research for performance measurement of mobile
manipulators. Journal of Research of the National In-
stitute of Standards and Technology, 121:342–366.
Chitta, S., Sucan, I., and Cousins, S. (2012). Moveit![ros
topics]. IEEE Robotics & Automation Magazine,
19(1):18–19.
Chu, K., Zhang, Q., Han, H., Xu, C., Pang, W., Ma, Y.,
Sun, N., and Li, W. (2017). A systematic review and
meta-analysis of nonpharmacological adjuvant inter-
ventions for patients undergoing assisted reproductive
technology treatment. International Journal of Gyne-
cology & Obstetrics, 139(3):268–277.
Chu, Y., Huang, C., Xie, X., Tan, B., Kamal, S., and Xiong,
X. (2018). Multilayer hybrid deep-learning method
for waste classification and recycling. Computational
Intelligence and Neuroscience, 2018.
Cruz, L., Lucio, D., and Velho, L. (2012). Kinect and rgbd
images: Challenges and applications. In 2012 25th
SIBGRAPI Conference on Graphics, Patterns and Im-
ages Tutorials, pages 36–49. IEEE.
Dai, W., Sun, Y., and Qian, X. (2013). Functional analysis
of grasping motion. In 2013 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
3507–3513. IEEE.
Donoho, D. L. and Grimes, C. (2003). Hessian eigen-
maps: Locally linear embedding techniques for high-
dimensional data. Proceedings of the National
Academy of Sciences, 100(10):5591–5596.
Feng, C., Taguchi, Y., and Kamat, V. R. (2014). Fast plane
extraction in organized point clouds using agglomera-
tive hierarchical clustering. In Robotics and Automa-
tion (ICRA), 2014 IEEE International Conference on,
pages 6218–6225. IEEE.
Gundupalli, S. P., Hait, S., and Thakur, A. (2017). A review
on automated sorting of source-separated municipal
solid waste for recycling. Waste management, 60:56–
74.
LeCun, Y., Bottou, L., Bengio, Y., Haffner, P., et al. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Lei, Q., Chen, G., and Wisse, M. (2017). Fast grasping of
unknown objects using principal component analysis.
AIP Advances, 7(9):095126.
Lu, Y. (2017). Industry 4.0: A survey on technologies, ap-
plications and open research issues. Journal of Indus-
trial Information Integration, 6:1–10.
Masuta, H., Motoyoshi, T., Sawai, K. K. K., and Oshima,
T. (2016). Plane extraction using point cloud data for
service robot. In Computational Intelligence (SSCI),
2016 IEEE Symposium Series on, pages 1–6. IEEE.
Mittal, G., Yagnik, K. B., Garg, M., and Krishnan, N. C.
(2016). Spotgarbage: smartphone app to detect
garbage using deep learning. In Proceedings of the
2016 ACM International Joint Conference on Per-
vasive and Ubiquitous Computing, pages 940–945.
ACM.
Nguyen, A. and Le, B. (2013). 3d point cloud segmentation:
A survey. In RAM, pages 225–230.
Ni, H., Lin, X., and Zhang, J. (2017). Classification of als
point cloud with improved point cloud segmentation
and random forests. Remote Sensing, 9(3):288.
Nurunnabi, A., Belton, D., and West, G. (2012). Robust
segmentation in laser scanning 3d point cloud data.
In Digital Image Computing Techniques and Appli-
cations (DICTA), 2012 International Conference on,
pages 1–8. IEEE.
Rad, M. S., von Kaenel, A., Droux, A., Tieche, F., Ouer-
hani, N., Ekenel, H. K., and Thiran, J.-P. (2017). A
computer vision system to localize and classify wastes
on the streets. In International Conference on Com-
puter Vision Systems, pages 195–204. Springer.
Rusu, R. B. and Cousins, S. (2011). 3d is here: Point cloud
library (pcl). In Robotics and automation (ICRA),
2011 IEEE International Conference on, pages 1–4.
IEEE.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
ten Pas, A., Gualtieri, M., Saenko, K., and Platt, R. (2017).
Grasp pose detection in point clouds. The Interna-
tional Journal of Robotics Research, 36(13-14):1455–
1473.
Tenenbaum, J. B., De Silva, V., and Langford, J. C. (2000).
A global geometric framework for nonlinear dimen-
sionality reduction. science, 290(5500):2319–2323.
Thilagamani, S. and Moorthi, S. (2011). A survey on image
segmentation through clustering. International Jour-
nal of Research and Reviews in Information Sciences,
1.
Vo, A.-V., Truong-Hong, L., Laefer, D. F., and Bertolotto,
M. (2015). Octree-based region growing for point
cloud segmentation. ISPRS Journal of Photogramme-
try and Remote Sensing, 104:88–100.
Xiao, J., Zhang, J., Adler, B., Zhang, H., and Zhang, J.
(2013). Three-dimensional point cloud plane seg-
mentation in both structured and unstructured en-
vironments. Robotics and Autonomous Systems,
61(12):1641–1652.
Zeng, A., Song, S., Yu, K., Donlon, E., Hogan, F. R., Bauz
´
a,
M., Ma, D., Taylor, O., Liu, M., Romo, E., Fazeli,
N., Alet, F., Dafle, N. C., Holladay, R., Morona, I.,
Nair, P. Q., Green, D., Taylor, I., Liu, W., Funkhouser,
T. A., and Rodriguez, A. (2017). Robotic pick-and-
place of novel objects in clutter with multi-affordance
grasping and cross-domain image matching. CoRR,
abs/1710.01330.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
622
