
Quantitative Metrics for Mutation Testing
Amani Ayad
1
, Imen Marsit
2
, JiMeng Loh
1
, Mohamed Nazih Omri
2
and Ali Mili
1 a
1
NJIT, Newark NJ, U.S.A.
2
MARS Laboratory, University of Sousse, Tunisia
Keywords:
Mutation Testing, Software Metrics, Equivalent Mutants, Redundant Mutants, Mutation Score.
Abstract:
Mutant generation is the process of generating several variations of a base program by applying elementary
modifications to its source code. Mutants are useful only to the extent that they are semantically distinct
from the base program; the problem of identifying and weeding out equivalent mutants is an enduring issue
in mutation testing. In this paper we take a quantitative approach to this problem where we do not focus on
identifying equivalent mutants, but rather on gathering quantitative information about them.
1 EQUIVALENT MUTANTS: AN
ENDURING NUISANCE
Mutation testing is a long-standing technique in soft-
ware testing research, and is finding its way into field
practice; it consists of generating a set of variants of a
base program by applying standard atomic changes
to the source code of the program. In (Papadakis
et al., 2019), Papadakis et al. present a sweeping sur-
vey of mutation testing, starting from its emergence
in the late seventies to the present; they analyze the
evolution of the level of interest in mutation testing,
as reflected by the number of publications that ap-
pear in relevant venues. They also survey the various
applications of mutation testing, the tools of mutant
generation, the extensions of the mutation concept to
other software artifacts, and the main technical chal-
lenges of mutation testing. Interestingly, they cite the
problem of equivalent mutants and redundant mutants
(two aspects we will address in this paper) among the
research questions that remain largely unresolved.
Mutants are used for a wide range of purposes
in software testing, and are useful only to the extent
that they are semantically distinct from the base pro-
gram; but it is very common for mutants to be seman-
tically equivalent to the base program, despite being
syntactically distinct. Equivalent mutants are a ma-
jor nuisance in mutation testing because they intro-
duce a significant amount of bias in mutation-based
analysis. Consequently, much research has been de-
voted to the identification of equivalent mutants in
a
https://orcid.org/0000-0002-6578-5510
a pool of mutants generated from a base program
by some mutation generation policy (Offut and Pan,
1997; Yao et al., 2014; Inozemtseva and Holmes,
2014; Aadamopoulos et al., 2004; Papadakis et al.,
2014; Schuler and Zeller, 2010; Just et al., 2013b;
Nica and Wotawa, 2012; Delamaro et al., 2001; An-
drews et al., 2005; Namin and Kakarla, 2011; Just
et al., 2014b; Gruen et al., 2009; Just et al., 2013a;
Just et al., 2014a; Kintis et al., 2018; Wang et al.,
2017; Hierons et al., 1999; Carvalho et al., 2018). At
its core, the detection of equivalent mutants consists
in analyzing a base program (say P) and a mutant (say
M) to determine whether P and M are semantically
equivalent, while they are (by construction) syntacti-
cally distinct. This is clearly a very difficult problem,
since it relies on a detailed semantic analysis of P and
M; if we knew how to perform a detailed semantic
analysis of P alone (let alone P and M) we could prob-
ably determine whether P is correct, and do away with
testing altogether. In the absence of a simple, gen-
eral, practical solution, researchers have resorted to
approximate solutions and heuristics. These include,
for example, inferring equivalence from a local analy-
sis of P and M in the neighborhood of the mutation(s);
this produces sufficient but unnecessary conditions,
hence leads to a loss of recall; definite equivalence re-
quires, inconveniently, that we analyze the programs
in full. Other approaches include overapproximations
and comparison of the programs’ functions (through
slicing) or the programs’ dynamic behavior (through
execution traces); these approaches yield necessary
but insufficient conditions of equivalence, hence lead
to a loss of precision.
Ayad, A., Marsit, I., Loh, J., Omri, M. and Mili, A.
Quantitative Metrics for Mutation Testing.
DOI: 10.5220/0007841800490059
In Proceedings of the 14th International Conference on Software Technologies (ICSOFT 2019), pages 49-59
ISBN: 978-989-758-379-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
49

It is fair to claim that despite several decades of
research, there is no general, simple, scalable solu-
tion for dealing with equivalent mutants in mutation
testing.
2 A QUANTITATIVE APPROACH
The problem of equivalent mutants takes many forms
in mutation testing, including:
• Mutant Equivalence. When we generate, say 100
mutants of some program P, and we want to check
whether some test data T can detect (kill) all the
mutants, we ought to consider only those mutants
that are not equivalent to P; indeed the mutants
that are semantically equivalent to P cannot be
detected (killed) regardless of how adequate test
data set T is. In this paper we define a function we
call REM (Ratio of Equivalent Mutants) to capture
the ratio of equivalent mutants that a program P is
prone to generate, for a given mutant generation
policy.
• Mutant Redundancy. Let us assume that out of
the 100 mutants we have generated, we have de-
termined that 80 are not equivalent to P; let us
further assume that test data set T is able to detect
(kill) all 80 mutants. What this tells us about T
depends to a large extent on how many of these
80 mutants are equivalent to each other: at an ex-
treme, if all 80 mutants were semantically equiv-
alent to each other, then all we know about T is
that it was able to distinguish one mutant from P;
at another extreme, if no two mutants were seman-
tically equivalent, then we would know that set T
is able to distinguish as many as 80 distinct mu-
tants from P. Hence it is important to know how
many equivalence classes the set of 80 mutants
has, modulo the relation of semantic equivalence.
In this paper we define a function we call NEC
(Number of Equivalence Classes) to capture the
number of equivalence classes of the set of mu-
tants modulo semantic equivalence (excluding the
equivalence class of P); and we show how we can
estimate NEC.
• Mutation score. Imagine that we run the 100
mutants we have generated on test data T , and
we find that 60 mutants are detected (killed) and
40 are not; it is common to take 0.6 (=60/100)
as the mutation score of T . We argue that this
metric is flawed, for two reasons: first, the mu-
tation score ought to be based not on the to-
tal number of generated mutants, but rather on
those that are estimated to be non-equivalent to P
((1 − REM) × 100, in this case); second, the mu-
tation score ought not count the number of indi-
vidual mutants detected, but rather the number of
equivalence classes covered by the detected mu-
tants. Indeed, whenever one mutant is detected
by test data T , all the mutants in the same class
are also detected; at an extreme case, if all 80 mu-
tants form a single equivalence class, and test data
T detects one of them, it automatically detects all
80; to say in such a situation that T detected 80
mutants is misleading; it is more meaningful to
say that T detected one equivalence class (the fact
that the equivalence class in question has 80 ele-
ments is rather insignificant, if we are interested
to assess the adequacy of T ). Hence we argue
that the mutation score should be defined in terms
of equivalence classes, not in terms of individ-
ual mutants; in this paper, we introduce a metric
to this effect, which we call EMS (Equivalence-
based Mutation Score).
As we shall see in this paper, NEC is defined in terms
of REM, and EMS is defined in terms of NEC; hence
REM plays a pivotal in this study. To gain some in-
sight into how to estimate REM, we ask two related
questions:
• What makes a program prone to generate equiva-
lent mutants?
• Given a base program P and a mutant M, what
may cause the mutant to be equivalent to the base
program?
To answer the first question, we make the follow-
ing observation: A program that is prone to gen-
erate equivalent mutants is a program that can con-
tinue performing the same function despite the pres-
ence and sensitization of mutations in its source code.
Now, mutations are supposed to simulate faults in
programs; if we replace ”mutations” by ”faults” in
the above statement we find that a program that is
prone to generate equivalent mutants is a program that
can continue perfoming the same function despite the
presence and sensitization of faults in its source code.
This is exactly the characterization of fault tolerant
programs, and we know too well what attribute makes
programs fault tolerant: it is redundancy. Hence if we
can quantify the redundancy of a program, we can use
the redundancy metrics to predict the REM of a pro-
gram.
To answer the second question, we consider the
following circumstances that may cause a mutant to
be equivalent to a base program (using the terminol-
ogy of Laprie et al (Avizienis et al., 2004; Laprie,
1991; Laprie, 2004; Laprie, 1995)).
ICSOFT 2019 - 14th International Conference on Software Technologies
50

• The mutation is not a fault, i.e. it never generates
a state that is different from the original program;
this arises in trivial circumstances such as when
the mutation applies to dead code, but may also
arise in more common cases, such as, e.g. chang-
ing < onto ≤ when the operands being compared
are never equal (e.g. an array of unique identi-
fiers).
• The mutation is a fault, but it causes no error; i.e.
it does cause the generation of a different state,
but the state it generates is correct (as correct as
the state generated by the base program); as an
example, imagine that the mutation causes a list
of items to be visited in a different order from the
original program, but the order is irrelevant.
• The mutation is a fault, it does cause errors, but
the errors do not cause failure. In other words
the mutation causes the generation of an erro-
neous state, but the error is subsequently masked
by downstream code.
• The mutation is a fault, it does cause errors, the
errors do cause failure, but the failure falls within
the tolerance of the equivalence oracle. If the
equivalence oracle does not test for comprehen-
sive equality between the final state of P and the
final state of M, it is conceivable that M and P are
considered equivalent while their final states are
distinct.
3 REDUNDANCY METRICS
In this section, we review some metrics which, we
feel, may be statistically related to the REM of a pro-
gram; these metrics reflect various forms of program
redundancy, and they are related with the circum-
stances we cite above for a mutant to be equivalent to
a base program. These metrics are defined by means
of Shannon’s entropy function (Shannon, 1948); we
use the notations H(X), H(X|Y ) and H(X,Y ) to de-
note, respectively, the entropy of random variable X,
the conditional entropy of X given Y , and the joint
entropy of random variables X and Y ; we assume that
the reader is familiar with these concepts, their inter-
pretations, and their properties (Csiszar and Koerner,
2011). For each metric, we briefly present its defini-
tion, its interpretation, how we calculate it, and why
we believe that it is correlated to (because it affects)
the REM of a program. Because the REM is a ratio
that ranges between 0 and 1, we resolve to define all
our metrics as values between 0 and 1, so as to facili-
tate the derivation of a regression model. For the sake
of simplicity, we compute all entropies under the as-
Table 1: Entropy of Declared State.
Data type Entropy (bits)
bool 1
char 8
int 32
float 64
sumption of equal probability. Under this assumption,
our estimates are in fact upper bounds of the actual
entropy.
3.1 State Redundancy
What we want to represent: When we declare vari-
ables in a program, we do so for the purpose of rep-
resenting the states of the program; for a variety of
reasons, it is very common to find that the range of
values that program variables may take is much larger
than the range of values that actual/ feasible program
states may take. We want state redundancy to reflect
the gap between the declared state and the actual state
of the program.
How we define it: If we let S be the declared state
of the program, and σ be the actual state of the pro-
gram, then the state redundancy of the program can be
measured by the difference between their respective
entropies; to normalize it (so that it ranges between
0.0 and 1.0) we divide it by the entropy of the declared
state. Recognizing that the entropy of the actual state
decreases (hence the redundancy increases) as the ex-
ecution of the program proceeds from the initial state
to the final state, we define, in fact two different mea-
sures of state redundancy, one for each state.
Definition 1. Given a program P whose declared
state (defined by its variable declarations) is S, we
let σ
I
and σ
F
be its initial and final actual states, we
define its initial state redundancy and its final state re-
dundancy as, respectively:
SR
I
=
H(S) − H(σ
I
)
H(S)
,
SR
F
=
H(S) − H(σ
F
)
H(S)
.
How we calculate it: To compute H(S) we use a
table that maps each data type to its width in bits,
As an example, we consider the following program:
void P()
{int year, birthYear, age;
read (year, birthYear);
assert ((2019 <= year <= 2169) // initial
&& (1869 <= birthYear <= 2019));// state
age = year - birthYear; // final state
}
Quantitative Metrics for Mutation Testing
51

The declared space of this program is defined by
three integer variables, hence H(S) = 96 bits. Its
initial state is defined by two variables (year and
birthYear) that have a range of 151 distinct values and
an integer variable (age) that has free range, hence
H(σ
I
) = 32 + 2 × log
2
(151) = 46.48 bits. As for the
final state, it is determined fully by the values of year
and birthYear, since age is a function of these two,
hence its entropy is merely: H(σ
F
) = 2 × log(151) =
14.48 bits. Hence:
SR
I
=
96 − 46.48
96
= 0.516.
SR
F
=
96 − 14.48
96
= 0.85.
Of course, there is more redundancy in the final state
than in the initial state.
Why we feel it is correlated to the REM of a pro-
gram: State redundancy reflects the amount of dupli-
cation of the information maintained by the program,
or the amount of extra bits of information that are part
of the declared state; the more duplicated bits or un-
used bits are lying around in the program state, the
greater the likelihood that a mutation affects bits that
are not subsequently referenced in the execution of
the program (hence do not affect its outcome).
3.2 Non Injectvity
What we want to represent: A function f is said to be
injective if and only if it maps different inputs onto
different outputs, i.e. x 6= x
0
⇒ f (x) 6= f (x
0
). A func-
tion is non-injective if it violates this property; it is
all the more non-injective that it maps a larger set of
distinct inputs onto a common output.
How we define it: For the purposes of this metric,
we view a program as mapping initial states onto fi-
nal states. One way to quantify non-injectivity is to
use the conditional entropy of the initial state given
the final state: this entropy reflecte the uncertainty we
have about the initial state given that we know the fi-
nal state; this entropy increases as more initial states
are mapped to the same final state; to normalize it, we
divide it by the entropy of the initial state.
Definition 2. Given a program P on space S, the non-
injectivity of P is denoted by NI and defined by:
NI =
H(σ
I
|σ
F
)
H(σ
I
)
,
where σ
I
and σ
F
are, respectively, the initial and final
actual state of P.
Because σ
F
is a function of σ
I
, the conditional en-
tropy can be simplified (Csiszar and Koerner, 2011),
yielding the following formula:
NI =
H(σ
I
) − H(σ
F
)
H(σ
I
)
.
In (Androutsopoulos et al., 2014), Androutsopoulos
et al. introduce a similar metric, called squeeziness,
which they find to be correlated to the probability that
an error arising at some location in a program fails to
propagate to the output.
How we calculate it: We have already discussed
how to compute the entropies of the initial state and
final state of a program. As an illustration, we find
that the non-injectivity of the program cited in Section
3.1 is:
NI =
H(σ
I
) − H(σ
F
)
H(σ
I
)
=
46.48 − 14.48
46.48
= 0.69.
Why we feel it is correlated to the REM of a pro-
gram: One of the main sources of mutant equivalence
is the ability of programs to mask errors that have in-
fected the state, by mapping the erroneous state onto
the same final state as the correct state. This hap-
pens all the more frequently that the function of the
program is more non-injective; hence non-injectivity
measures exactly the capability of the program to
mask errors caused by the sensitization of mutations.
3.3 Functional Redundancy
What we want to represent: Not all programs can be
faithfully modeled as mappings from initial states to
final states, as we do in Section 3.2; sometimes a
more faithful model of a program may be a hetero-
geneous function from some input space X to some
output space Y . Programs exchange information with
their environment through a wide range of channels:
they receive input information (X) through read state-
ments, passed by-value parameters, access to global
variables, etc; and they send output information (Y )
through write statements, passed by-reference param-
eters, return statements, access to global variables,
etc. We want a metric that reflects non-injectivity
(hence the potential for masking errors) for this model
of computation.
How we define it: We let X be the random variable
that represents all the input information used by the
program, and we let Y be the random variable that
represents all the output information that is delivered
by P.
Definition 3. Given a program P that takes input X
and returns output Y , the functional redundancy of P
is denoted by FR and defined by:
FR =
H(X|Y )
H(X)
.
ICSOFT 2019 - 14th International Conference on Software Technologies
52

Because Y is a function of X, we know (Csiszar
and Koerner, 2011) that the conditional entropy
(H(X|Y )) can be written as (H(X )−H(Y )). Also, the
entropy of Y is less than or equal to the entropy of X,
and both are non-negative, hence FR ranges between
0 and 1 (we assume, of course, that H(X) 6= 0).
How we calculate it: The entropy of X is the sum
of the entropies of all the input channels and the en-
tropy of Y is the sum of the entropies of all the output
channels. We consider the following program:
int P(int year, birthyear)
{read (year, birthYear);
assert ((2019 <= year <= 2169)
&& (1869 <= birthYear <= 2019));
age = year - birthYear;
return age;
}
Random variable X is defined by program vari-
ables year and birthYear, hence its entropy is H(X) =
2 × log
2
(151) = 14.48. Random variable Y is defined
by variable age, whose values range between 0 and
150, hence H(Y ) = log
2
(151) = 7.24 bits. Hence
FR =
14.48 − 7.24
14.48
= 0.50.
Why we feel it is correlated to the REM of a pro-
gram: Functional redundancy, like non-injectivity, re-
flects the program’s ability to mask errors caused by
mutations; whereas non-injectivity models the pro-
gram as a homogeneous function on its state space,
functional redundancy models it as a heterogeneous
mapping from an input space to an output space.
All the metrics we have discussed so far pertain to
the base program; we refer to them as the program’s
intrinsic metrics. The metric we present in the next
section deals not with the base program, but rather
with the oracle that is used to rule on equivalence.
3.4 Non Determinacy
What we want to represent: Whether two programs
(in particular, a program and a mutant thereof) are
equivalent or not may depend on how thoroughly
we check their behavior. For example, it is possi-
ble that out of three program variables, two represent
the intended function of the programs and the third
is merely an auxiliary variable. In such a case, the
oracle of equivalence ought to check that the relevant
variables have the same value, but ignore the auxiliary
variable.
From this discussion we infer that the equivalence
between a base program P and a mutant M may de-
pend on what oracle is used to compare the output of
P with the output of M, and we are interested to define
Table 2: Non Determinacy of Sample Oracles.
Ω() H(S
P
|S
M
) ND
(x
P
= x
M
) ∧ (y
P
= y
M
) 0 0
∧(z
P
= z
M
)
(x
P
= x
M
) ∧ (y
P
= y
M
) 32 0.33
(x
P
= x
M
) 64 0.66
true 96 1.0
a metric that reflects the degree of non-determinacy
of the selected oracle.
We are given a program P on space S and a mu-
tant M on the same space, and we consider an oracle
Ω() on S defined by an equivalence relation on S. We
want the non-determinacy of Ω() to reflect how much
uncertainty we have about the output of M for a given
input if we know the output of P for the same input.
Definition 4. Given a program P and a mutant M
on space S, and given an oracle Ω() defined as an
equivalence relation on S, we let S
P
and S
M
be the
random variables that represent the final states of P
and M for a common input. The non-determinacy of
Ω() is denoted by ND and defined by:
ND =
H(S
P
|S
M
)
H(S
P
)
.
Given that Ω() defines an equivalence class over
S, this metric reflects the amount of uncertainty we
have about an element of S if all we know is the equiv-
alence of this element by relation Ω().
How we calculate it: The conditional entropy
H(S
P
|S
M
) is really the entropy of the equivalence
classes of S modulo the equivalence relation defined
by Ω(). It represents the amount of uncertainty we
have about an element of S if all we know is its equiv-
alence class; if Ω() is the identity relation then all
equivalence classes are singletons and ND = 0; else
it is the base 2 logarithm of the size of equivalence
classes. As an example, we consider space S defined
by three variables, say x, y, z of type integer, and we
show in the following table a number of possible or-
acles with their respective non-determinacies. For all
these oracles, H(S
P
) = 3×32 = 96; the only term that
changes is H(S
P
|S
M
).
Why we feel it is correlated to the REM of a pro-
gram: Of course, the weaker the oracle that tests for
equivalence, the more mutants will be found to be
equivalent to the base program.
3.5 A Posteriori Justification
In section 2, we had asked two questions: First, what
attribute makes a program prone to generate equiva-
lent mutants; second, under what circumstances can
Quantitative Metrics for Mutation Testing
53
a mutant behave in a way that is equivalent to a base
program. The metrics we introduced in section 3 an-
swer the first question, since they capture different as-
pects of redundancy. In table 3, we discuss why we
feel that the selected metrics answer the second ques-
tion, in the sense that they reflect the likelihood of
occurrence of each circumstance that we had identi-
fied.
Table 3: Metrics vs Circumstances of Equivalence.
Metrics Circumstances of Equivalence
SR
I
Mutation not a Fault
SR
F
Mutation is a Fault
Causes no Error
FR,NI
Mutation is a Fault
Causes Errors
Errors Masked
ND
Mutation is a Fault
Causes Errors
Errors Propagate
Failure Undetected
3.6 A Java Compiler
In order to automate the calculation of these redun-
dancy metrics, and ensure that our calculations are
applied uniformly, we use compiler generation tech-
nology (ANTLR, http://www.antlr.org/) to parse Java
code and derive these metrics for individual methods
in Java classes. For each method, we must estimate
the following quantities:
• The entropy of the declared space, H(S).
• The entropy of the initial actual space, H(σ
I
).
• The entropy of the final actual space, H(σ
I
).
• The entropy of the input space, H(X).
• The entropy of the output space, H(Y ).
The entropies of the declared space, the input space,
and output space are fairly straightforward; they con-
sist in identifying the relevant variables and adding
their respective entropies, depending on their data
type, as per table 1.
For the entropy of the initial actual space, we are
bound to rely on input from the source code, as we
have no other means to probe the intent of the pro-
grammer (re: how they use declared variables to rep-
resent the actual program state). To this effect, we in-
troduce a special purpose assert statement, which the
engineer may use to specify the precondition of the
method whose REM we want to compute. We pro-
pose the following statement
preassert(<precondition>)
whose semantic definition is exactly the same as a
normal assert statement, but this one is used specif-
ically to analyze the entropy of the initial actual state.
When the method has an exception call at the begin-
ning as a guard for the method call, then it is straight-
forward to have a preassert() statement immediately
after the exception statement, with the negation of the
condition that triggers the exception. The entropy of
the initial actual state is computed as:
H(σ
I
) = H(S) − ∆H,
where ∆H is the reduction in entropy represented by
the assertion of the preassert() statement. This
quantity is defined inductively according to the struc-
ture of the assertion, as shown summarily below:
• ∆H(A ∧ B) = ∆H(A) + ∆H(B).
• ∆H(A ∨ B) = max(∆H(A), ∆H(B)).
• ∆H(X == Y ), where X and Y are expressions of
the same type, equals the entropy of the common
type. For example, if x and y are integer variables,
then ∆H(x + 1 == y − 1) is 32 bits.
• ∆H(X < Y ) = ∆H(X <= Y ) = ∆H(X > Y ) =
∆H(X >= Y ) = 1 bit. So for example ∆H(x +1 >
0) = 1 bit, since this equality reduces the range of
possible values of x by half, whose log
2
is then
reduced by 1.
This is not a perfect solution, but it is adequate for our
purposes.
For the entropy of the final actual space, we have
to keep track of dependencies that the program creates
between its variables. We do so using a Boolean ma-
trix (called D, for Dependency), which is initialised to
the identity (T on the diagonal, F outside, to mean that
initially each variable depends only on itself); when-
ever we encounter an assignment statement, of the
form (x=E(y,z,u,v)), we replace the row of x in D
with the logical OR of the rows of all the variables
that appear in expression E. At the end of the pro-
gram we add (i.e. take the logical OR) of all the rows
of the matrix; this yields a vector that indicates which
program variables affect the value of the final state
of the program. The sum of the entropies of the se-
lected variables is the entropy of the final actual state.
If the assignment statement is embedded within an
if-stement, an if-then-else statement or a while loop,
then the variables that appear in the condition of the
if or while are added to the variables that are on the
right hand side of the assignment, since they affect the
value of the assigned variable.
ICSOFT 2019 - 14th International Conference on Software Technologies
54

4 A STATISTICAL MODEL
In order to test our assumption that our redundancy
metrics are statistically correlated with the REM of
a program, we have conducted an empirical experi-
ment, whereby we select a set of Java classes from
the Apache Common Mathematics Library and run
our Java compiler to compute the redundancy met-
rics of each method of each class. On the other hand,
we apply a mutant generator to these classes using a
uniform set of standard mutation operators, then we
execute the base program and the mutants on bench-
mark test data sets, and record how many mutants are
killed by the test. Simultaneously, we keep track of
coverage metrics, and exclude from consideration any
method whose line coverage is below 90%. By keep-
ing in our sample only those Java classes for which
line coverage is high (in fact the vast majority reach
100% line coverage) we maximize the likelihood that
mutants that are found to survive after undergoing
the test are equivalent to the base program. Under
this assumption, we use the ratio of surviving mu-
tants of each method over the total number of mu-
tants as the REM of the method. Our data sample
includes about two hundred methods, but when we
exclude those whose size is below 20 LOC we end up
with 66 methods; because we treat individual meth-
ods rather than whole classes, this condition excludes
many small methods. The requirement of anonymity
preclude us from posting this data online, but we may
post it once the requirement is lifted.
We peform a statistical regression using REM as
the dependent variable and the intrinsic redundancy
metrics (i.e. those metrics that pertain to the pro-
gram, not the equivalence oracle) as the independent
variables. We use a logistic model, i.e. a model
such that log(
REM
1−REM
) is a linear combination of
the independent variables. The metric that pertains
to the equivalence oracle (ND) is not part of the
regression analysis, but is integrated in the equation
in such a way that if ND = 0 we obtain the regression
formula involving the intrinsic metrics, and if ND = 1
(extreme case when the oracle tests trivially for true ,
i.e. all the mutants are found to be equivalent) we
want the REM to be 1. The resulting formula is:
REM = ND + (1 − ND)×
(−3.27 + 1.35 × SR
F
+ 1.26 × FR).
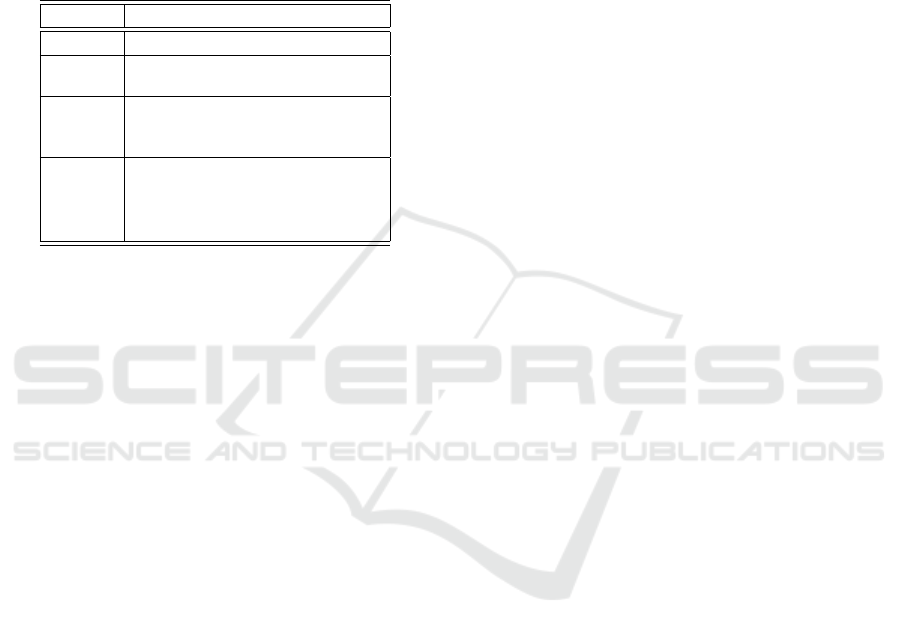
With this equation in place, we can now have a
tool that automatically computes the redundancy met-
rics, then derives the REM using this formula. Figures
1 and 2 show a sample input and output screen for this
tool; not all the functionality alluded to in the input
screen is operational as of the date of writing; for
now, the mutant generators are fixed, and the user
does got have the option to select mutation operators.
5 EQUIVALENCE AND
REDUNDANCY
5.1 Mutant Equivalence
Given a set of M mutants of a base program P, and
given a ratio of equivalent mutants REM, the number
of equivalent mutants is estimated to be M × REM.
Hence we cannot expect any test data set T to kill
more than N = M × (1 − REM) mutants (modulo the
margin of error in the estimation of REM).
5.2 Mutant Redundancy
In (Papadakis et al., 2019), Papadakis et al. raise
the problem of mutant redundancy as the issue where
many mutants may be equivalent among themselves,
hence do not provide test coverage commensurate
with their number. If we have sixty mutants divided
into twelve classes where each class contains five
equivalent mutants, then we have only twelve distinct
mutants; and if some test data set T kills these sixty
mutants, it should really get credit for twelve mutants
(twelve casualties, so to speak), not sixty, since when-
ever it kills a mutant from one equivalence class, it
automatically kills all the mutants of the same class.
Of course, it is very difficult to determine, in a set
of mutants, which mutants are equivalent and which
are not; but again, the REM enables us to draw some
quantitative data about the level of redundancy in a
pool of mutants.
The REM of the base program is computed us-
ing a regression formula whose independent variables
are the redundancy metrics extracted from the source
code of the program. Since the mutants are gener-
ated from the base program by means of elementary
syntactic changes, it is reasonable to consider that the
mutants have the same REM as the base program. If
we interpret the REM as the probability that any two
mutants are semantically equivalent, then we can esti-
mate the number of equivalence classes by answering
the following question: Given a set of size N, and
given that any two elements of this set have a proba-
bility REM to be in the same equivalence class mod-
ulo some relation EQ, what is the expected number of
equivalence classes of this set modulo EQ?
We denote this number by NEC(N,REM), and we
write it as follows:
Quantitative Metrics for Mutation Testing
55
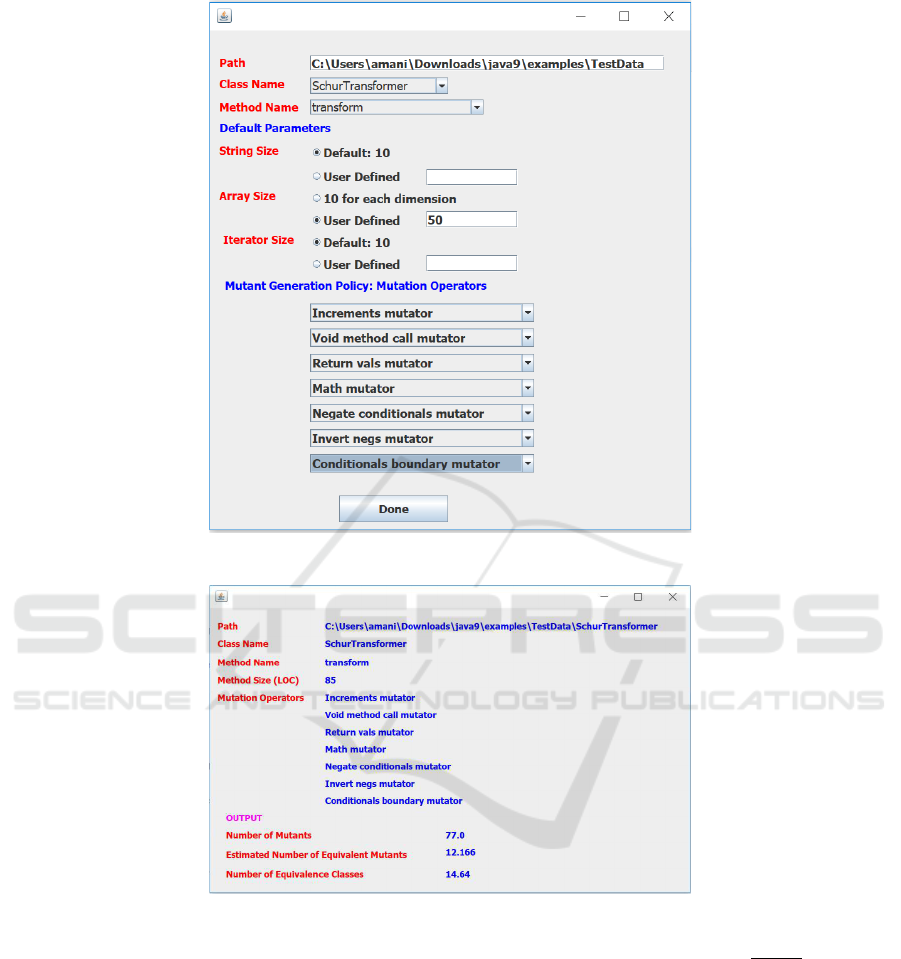
Figure 1: Input Screen.
Figure 2: Output Screen.
NEC(N,REM) =
N
∑
k=1
k × p(N, REM,k),
where p(N,REM, k) is the probability that a set of N
elements where each pair has probability REM to be
equivalent has k equivalence classes. This probability
satisfies the following inductive conditions.
• Basis of Induction. We have two base conditions:
– One Equivalence Class. p(N, REM,1) =
REM
N−1
. This is the probability that all N ele-
ments are equivalent.
– As Many Equivalence Classes as Elements,
or: All Equivalence Classes are Singletons.
p(N, REM,N) = (1 −REM)
N×(N−1)
2
. This is the
probability that no two elements are equivalent:
every two elements are not equivalent; there are
N × (N − 1) pairs of distinct elements, but be-
cause equivalence is a symmetric relation, we
divide this number by 2 (M
i
6= M
j
is the same
event as M
j
6= M
i
).
• Inductive Step. When we add one element to a
set of N − 1 elements, two possibilities may arise:
either this adds one to the number of equivalence
classes (if the new element is equivalent to no
current element of the set); or it maintains the
number of equivalence classes (if the new element
ICSOFT 2019 - 14th International Conference on Software Technologies
56

is equivalent to one of the existing equivalence
classes). Since these two events are disjoint, the
probability of the disjunction is the sum of the
probabilities of each event. Hence:
p(N, REM,k) = p(N − 1,REM,k)× (1 − (1 −
REM)
k
+p(N − 1, REM,k − 1) × (1 −
REM)
k−1
.
The following recursive program computes the
number of equivalence classes of a set of size N
whose elements have probability REM of being
equivalent.
#include <iostream>
#include "math.h"
using namespace std;
double p(int N, int k, double R);
int main ()
{
float R=0.158; int N=65;
float mean = 0.0; float ps=0.0;
for (int k=1; k<=N; k++)
{float prob=p(N,k,R); ps = ps+prob;
mean = mean + k*prob;}
cout<<"ps:"<<ps<<" mean:"<<mean<<endl;
}
double p(int N, int k, double R)
{if (k==1) {return pow(R,N-1);}
else
if (N==k) {return pow(1-R,(k*(k-1))/2);}
else {return p(N-1,k,R)*(1-pow(1-R,k))
+p(N-1,k-1,R)*pow(1-R,k-1);}}
Execution of this program with N = 65 and
REM = 0.158 yields NEC(N,REM) = 14.64, i.e. our
65 mutants represent only about 15 different mutants;
the remaining 50 are redundant.
6 MUTATION SCORE,
REVISITED
The quantification of redundancy, discussed in the
previous section, casts a shadow on the traditional
way of measuring the mutation score of a test data
set T : usually, if we execute a set of M mutants on
some test data set T and we find that X mutants have
been killed (i.e. shown to be different from the base
program P), we assign to T the mutation score X/M.
This metrics ignores the possibility that several of M
mutants may be equivalent, and several of the X killed
mutants may be equivalent. We argue that this metric
can be improved and made more meaningful, in three
ways:
• Because of the possibility that mutants may be
equivalent to the base program P, the baseline
ought to be the number of non-equivalent mutants,
i.e. N = (1 − REM) × M.
• Because of the possibility that those mutants that
are not equivalent to P may be equivalent amongst
themselves, we ought to focus not on the num-
ber of these mutants, bur rather on the number
of equivalence classes modulo semantic equiva-
lence. This is defined in the previous section as
NEC(N,REM).
• Because of the possibility that the X mutants
killed by test data set T may be equivalent
amongst themselves, we ought to give credit to T
not for the cardinality of X, but rather for the num-
ber of equivalence classes that X may overlap.
We refer to this number as COV (N,K,X), where
K = NEC(N,REM) is the number of equivalence
classes of the set of N mutants modulo equiva-
lence.
To compute COV (N,K,X ), we designate by
C
1
,C
2
,...C
K
the K equivalence classes, we desig-
nate by f
i
, for (1 ≤ i ≤ K), the binary functions
that take value 1 if and only if equivalence class
C
i
overlaps with (i.e. has a non-empty intersec-
tion with) set X , and value 0 otherwise. Then
COV (N, K,X ) = E(
∑
i=1
K f
i
). If we assume that all
classes are the same size and that elements of X are
uniformly distributed over the set of mutants, then
this can be written as:
cov(N,K, X) = K × p( f
i
= 1) = K × (1 − p( f
i
= 0)),
for an arbitrary i. For the first class to be considered,
p( f
1
= 0) =
K−1
K
X
, since each element of X has a
probability
K−1
K
of not being in class C
1
; for each sub-
sequent element, the numerator and denominator each
drops by 1. Hence we have the following formula:
COV (N, K,X ) = K × (1 −
K − 1
K
X
×
X−1
∏
i=0
N −
i
K−1
N − i
).
The following program computes this function, for
N = 65, K = 15 and X = 50.
#include <iostream>
#include "math.h"
using namespace std;
double cov(int N, int K, int X);
int main ()
{
int N=65; int K=15; int X=50;
cout << "cov: " << cov(N,K,X) << endl;
}
Quantitative Metrics for Mutation Testing
57

double cov(int N, int K, int X)
{
float prod=1;
for (int i=0; i<K; i++)
{prod = prod *
(N-i/(float)(K-1))/(float)(N-i);}
return K*(1-prod*pow((K-1)/(float)K,X));
}
Execution of this program yields
COV (65,15,50) = 12.55. We propose the fol-
lowing definition.
Definition 5. Given a base program P and M mutants
of P, and given a test data set T that has killed X mu-
tants, the mutation score of T is the ratio of equiva-
lence classes covered by X over the total number of
equivalence classes amongst the mutants that are not
equivalent to P.
We denote the mutation score by EMS(M,X). The
following proposition gives an explicit formula of the
mutation score.
Proposition 1. Given a program P and M mutants
of P, and given a test data set T that has killed X mu-
tants, the mutation score of T is given by the following
formula:
EMS(M,X) =
COV (N, NEC(N, REM),X)
NEC(N,REM)
,
where REM is the ratio of equivalent mutants of P
and N = M(1 − REM) is the number of mutants that
are not equivalent to P.
In the example above, for N = 65, REM = 0.158,
and X = 50 we find
EMS(77,50) =
12.55
15
= 0.84.
7 CONCLUSION
7.1 Summary
In this paper, we argue that the determination of mu-
tant equivalence and mutant redundancy by inspec-
tion and analysis of individual mutants is very expen-
sive and error-prone, at the same time that it is in fact
unnecessary, for most purposes. As a substitute, we
propose to analyze the amount of redundancy that a
program has, in various forms, and we find that this
enables us to extract a number of mutation-related
metrics at negligible cost. Central to this quantitative
analysis is the concept of ratio of equivalent mutants,
which measures the probability that any two mutants,
or a mutant and the base program, are semantically
equivalent.
7.2 Assessment and Threats to Validity
A lot of our work rides on the estimation of the REM,
which in turn rides on the estimation of the redun-
dancy metrics, and on the precision/ convergence of
the regression model. This is all the more critical
that the estimate of the number of equivalence classes,
NEC(N,REM), depends a great deal more on REM
than on N. Hence any error that arises in the estima-
tion of REM is likely to greatly affect the precision of
NEC(N,REM); this, in turn, affects the precision of
COV (N, K,X ), and that of EMS(M,X). This puts a
heavy onus on us to double check the way the redun-
dancy metrics are computed.
7.3 Prospects
Our current plan is to refine and upgrade a tool we
are currently developing to automate this quantitative
analysis, and to validate this tool through field test-
ing. Also, we want to select a set of mutant genera-
tion policies, and build a separate regression model
for each policy, so that for a given base program,
the calculation of the corresponding REM uses the
regression formula that matches the selected mutant
generation policy. Finally, we have plans to validate
our work empirically, by comparing our estimaates
sof REM against actual values, and by assessing the
precision of our other metrics, such as NEC(N, REM)
and COV (N, K,X).
ACKNOWLEDGEMENTS
This work is partially supported by a grant from NSF,
number DGE1565478.
REFERENCES
Aadamopoulos, K., Harman, M., and Hierons, R. (2004).
How to overcome the equivalent mutant problem and
achieve tailored selective mutation using co-evolution.
In Proceedings, Genetic and Evolutionary Computa-
tion, volume 3103 of LNCS, pages 1338–1349.
Andrews, J., Briand, L., and Labiche, Y. (2005). Is muta-
tion an appropriate tool for testing experiments? In
Proceedings, ICSE.
Androutsopoulos, K., Clark, D., Dan, H., Hierons, R. M.,
and Harman, M. (2014). An analysis of the rela-
tionship between conditional entropy and failed error
propagation in software testing. In Proceedings, ICSE
2014.
ICSOFT 2019 - 14th International Conference on Software Technologies
58

Avizienis, A., Laprie, J. C., Randell, B., and Landwehr,
C. E. (2004). Basic concepts and taxonomy of de-
pendable and secure computing. IEEE Transactions
on Dependable and Secure Computing, 1(1):11–33.
Carvalho, L., Guimares, M., Fernandes, L., Hajjaji, M. A.,
Gheyi, R., and Thuem, T. (2018). Equivalent mutants
in configurable systems: An empirical study. In Pro-
ceedings, VAMOS’18, Madrid, Spain.
Csiszar, I. and Koerner, J. (2011). Information Theory:
Coding Theorems for Discrete Memoryless Systems.
Cambridge University Press.
Delamaro, M. E., Maldonado, J. C., and Vincenzi, A. M. R.
(2001). Proteum /im 2.0: An integrated mutation test-
ing environment. In Wong, W. E., editor, Mutation
Testing for the New Century, volume 24, pages 91–
101. Springer Verlag.
Gruen, B., Schuler, D., and Zeller, A. (2009). The impact
of equivalent mutants. In Proceedings, MUTATION
2009, Denver, CO, USA.
Hierons, R., Harman, M., and Danicic, S. (1999). Using
program slicing to assist in the detection of equivalent
mutants. Journal of Software Testing, Verification and
Reliability, 9(4).
Inozemtseva, L. and Holmes, R. (2014). Coverage is not
strongly correlated with test suite effectiveness. In
Procedings, 36th International Conference on Soft-
ware Engineering. ACM Press.
Just, R., Ernst, M., and Fraser, G. (2013a). Using state
infection conditions to detect equivalent mutants and
speed up mutation analysis. In Dagstuhl Seminar
13021: Symbolic Methods in Testing, Wadern, Ger-
many.
Just, R., Ernst, M., and Fraser, G. (2014a). Efficient muta-
tion analysis by propagating and partitioning infected
execution states. In Proceedings, ISSTA’14, San Jose,
CA, USA.
Just, R., Ernst, M. D., and Fraser, G. (2013b). Using state
infection conditions to detect equivalent mutants and
sped up mutation analysis. In Proceedings, Dagstuhl
Seminar 13021: Symbolic Methods in Testing.
Just, R., Jalali, D., Inozemtseva, L., Ernst, M., Holmes, R.,
and Fraser, G. (2014b). Are mutants a valid substitute
for real faults in software testing? In Proceedings,
FSE.
Kintis, M., Papadakis, M., Jia, Y., Malveris, N., Y, L. T., and
Harman, M. (2018). Detecting trivial mutant equiva-
lences via compiler optimizations. IEEE Transactions
on Software Engineering, 44(4).
Laprie, J. C. (1991). Dependability: Basic Concepts and
Terminology: in English, French, German, Italian and
Japanese. Springer Verlag, Heidelberg.
Laprie, J. C. (1995). Dependability —its attributes, impair-
ments and means. In Predictably Dependable Com-
puting Systems, pages 1–19. Springer Verlag.
Laprie, J. C. (2004). Dependable computing: Concepts,
challenges, directions. In Proceedings, COMPSAC.
Namin, A. S. and Kakarla, S. (2011). The use of mutation
in testing experiments and its sensitivity to external
threats. In Proceedings, ISSTA.
Nica, S. and Wotawa, F. (2012). Using constraints for equiv-
alent mutant detection. In Andres, C. and Llana, L.,
editors, Second Workshop on Formal methods in the
Development of Software, EPTCS, pages 1–8.
Offut, A. J. and Pan, J. (1997). Automatically detecting
equivalent mutants and infeasible paths. Software
Testing, Verification and Reliability, 7(3):165–192.
Papadakis, M., Delamaro, M., and LeTraon, Y. (2014).
Mitigating the effects of equivalent mutants with mu-
tant clasification strategies. Science of Computer Pro-
gramming, 95(P3):298–319.
Papadakis, M., Kintis, M., Zhang, J., Jia, Y., Traon, Y. L.,
and Harman, M. (2019). Mutation testing advances:
An analysis and survey. In Advances in Compugters.
Schuler, D. and Zeller, A. (2010). Covering and uncover-
ing equivalent mutants. In Proceedings, International
Conference on Software Testing, Verification and Val-
idation, pages 45–54.
Shannon, C. (1948). A mathematical theory of communica-
tion. Bell Syst. Tech. Journal, 27:379–423, 623–656.
Wang, B., Xiong, Y., Shi, Y., Zhang, L., and Hao, D.
(2017). Faster mutation analysis via equivalence mod-
ulo states. In Proceedings, ISSTA’17, Santa Barbara,
CA, USA.
Yao, X., Harman, M., and Jia, Y. (2014). A study of equiv-
alent and stubborn mutation operators using human
analysis of equivalence. In Proceedings, ICSE.
Quantitative Metrics for Mutation Testing
59
