Parallel Streaming Implementation of Online Time Series Correlation
Discovery on Sliding Windows with Regression Capabilities
Boyan Kolev
1
, Reza Akbarinia
1
, Ricardo Jimenez-Peris
2
, Oleksandra Levchenko
1
,
Florent Masseglia
1
, Marta Patino
3
and Patrick Valduriez
1
1
Inria and LIRMM, Montpellier, France
2
LeanXcale, Madrid, Spain
3
Universidad Politecnica de Madrid (UPM), Madrid, Spain
Keywords: Time Series Correlation and Regression, Data Stream Processing, Distributed Computing.
Abstract: This paper addresses the problem of continuously finding highly correlated pairs of time series over the most
recent time window and possibly use the discovered correlations to select features for training a regression
model for prediction. The implementation builds upon the ParCorr parallel method for online correlation
discovery and is designed to run continuously on top of the UPM-CEP data streaming engine through efficient
streaming operators.
1 INTRODUCTION
Consider a big number of streams of time series data
(e.g. stock trading quotes), where we need to find
highly correlated pairs for the latest window of time
(say, one hour), and then continuously slide this
window to repeat the same search (say, every
minute). Doing this efficiently and in parallel could
help gather important insights from the data in real
time (Figure 1). This has been recently addressed by
the ParCorr parallel incremental sketching approach
(Yagoubi et al., 2018), which scales to 100s of
millions of parallel time series, and achieves 95%
recall and 100% precision. An interesting aspect of
the method is the discovery of time series that are
highly correlated to a certain subset of the time series,
which we call targets (Figure 2). This concept has
many applications in different domains (finance,
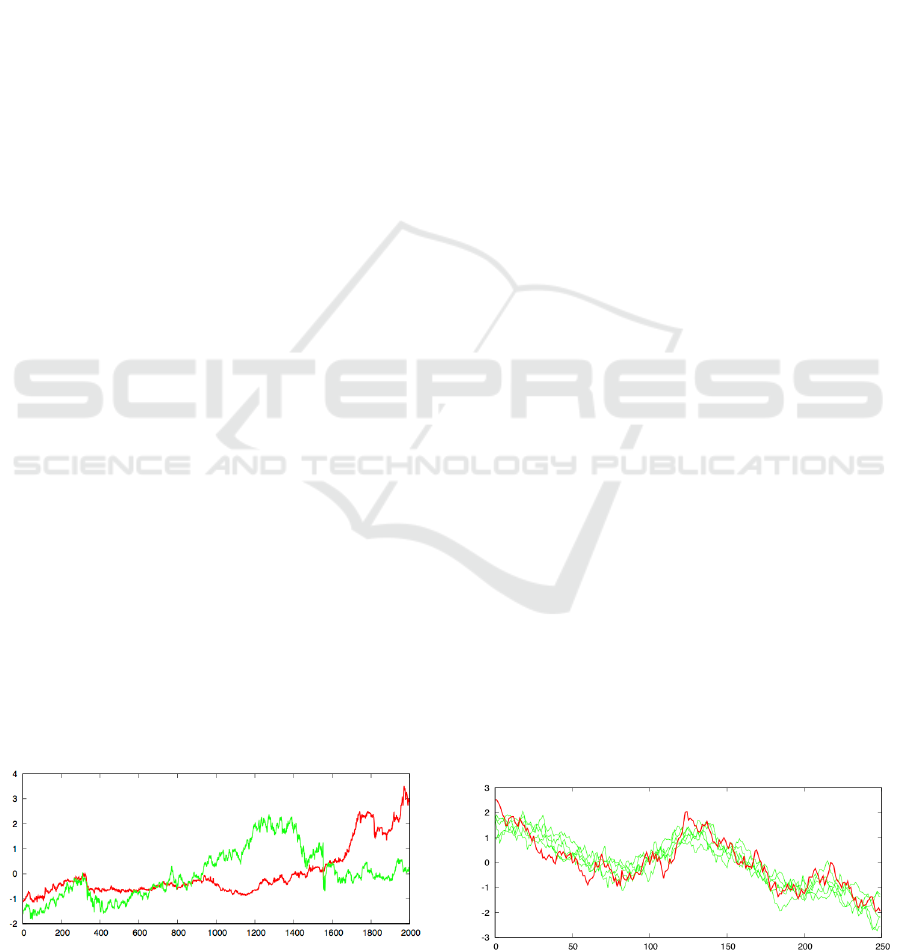
Figure 1: Example of a pair of time series that the method
found to be highly correlated over the first several sliding
windows of 500 time points, but not thereafter.
retail, etc.), where we would like to use the correlates
of a target as predictors to forecast the value of the
target for the next time window.
Such challenges have been identified by use case
scenarios, defined in the scope of the
CloudDBAppliance project (CDBA, 2019), which
aims to provide a database-as-a-service appliance
integrating several data management technologies,
designed to scale vertically on many-core
architectures. These include an operational database,
an analytical database, a data lake, and a data
streaming engine. To face these requirements, the
ParCorr method was implemented as a continuous
query for the highly scalable streaming engine and
enhanced with regression capabilities to provide for
per-window prediction of target values. In this paper,
we present the details of this implementation,
following a brief overview of the streaming engine
and the ParCorr method.
Figure 2: Example of a target time series (red) and its top
correlates (green) discovered by the method.
Kolev, B., Akbarinia, R., Jimenez-Peris, R., Levchenko, O., Masseglia, F., Patino, M. and Valduriez, P.
Parallel Streaming Implementation of Online Time Series Correlation Discovery on Sliding Windows with Regression Capabilities.
DOI: 10.5220/0007843806810687
In Proceedings of the 9th International Conference on Cloud Computing and Services Science (CLOSER 2019), pages 681-687
ISBN: 978-989-758-365-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
681

2 STREAMING ENGINE
OVERVIEW
Stream Processing (SP) is a novel paradigm for
analyzing in real-time data captured from
heterogeneous data sources. Instead of storing the
data and then processing it, the data is processed on
the fly, as soon as it is received, or at most a window
of data is stored in memory. SP queries are
continuous queries run on a (infinite) stream of
events. Continuous queries are modeled as graphs
where nodes are SP operators and arrows are streams
of events. SP operators are computational boxes that
process events received over the incoming stream and
produce output events on the outgoing streams. SP
operators can be either stateless (such as projection,
filter) or stateful, depending on whether they operate
on the current event (tuple) or on a set of events (time
window or number of events window). Several
implementations went out to the consumer market
from both academy and industry, such as Borealis
(Ahmad et al., 2005), Infosphere (Pu et al., 2001),
Storm
1
, Flink
2
and StreamCloud (Gulisano et al.,
2012). Storm and Flink followed a similar approach
to the one of StreamCloud in which a continuous
query runs in a distributed and parallel way over
several machines, which in turn increases the system
throughput in terms of number of tuples processed per
second. The streaming engine UPM-CEP (Complex
Event Processing) adds efficiency to this parallel-
distributed processing being able to reach higher
throughput using less resources. It improves the
network management, reduces the inefficiency of the
garbage collection by implementing techniques such
as object reutilization and takes advantage of the
novel Non Uniform Memory Access (NUMA)
multicore architectures by minimizing the time spent
in context switching of SP threads/processes.
The UPM-CEP JCEPC (Java CEP Connectivity)
driver hides from the applications the complexity of
the underlying cluster. Applications can create and
deploy continuous queries using the JCEPC driver as
well as register to the source streams and subscribe to
output streams of these queries. During the
deployment the JCEPC driver takes care of splitting a
query into sub-queries and deploys them in the CEP
cluster. Some of those sub-queries can be
parallelized.
1
http://storm.apache.org/
3 METHOD OVERVIEW
The ParCorr time series correlation discovery
algorithm (Yagoubi et al., 2018) is based on a work
on fast window correlations over time series of
numerical data (Cole et al., 2005), and concentrates
on adapting the approach for the context of a big
number of parallel data streams. The analysis is done
on sliding windows of time series data, so that recent
correlations are being continuously discovered in
nearly real-time. At each move of the sliding window,
the latest elements of the time series are taken as
multi-dimensional vectors. As a similarity measure
between such vectors, we take the Euclidean distance,
since it is related to the Pearson correlation
coefficient if applied to normalized vectors. Since the
sliding window can result in a very high number of
dimensions of time series vectors, which makes them
very expensive to be compared to each other, a major
challenge the algorithm addresses is the reduction of
the dimensionality in a way that nearly preserves the
Euclidean distances. For this purpose, random
projection approach is adopted, where each high-
dimensional vector is transformed into a low-
dimensional one (called “sketch” of the vector), by
applying a product with a specific transformation
matrix, the elements of which are randomly selected
from the values of either -1 or 1. This approach
guarantees with high probability that the distance
between any pair of original vectors correspond to the
distance between their sketches. Furthermore, to
simplify the comparing across sketches, each sketch
vector is partitioned into subvectors (e.g. two-
dimensional), so that for example a 30-dimensional
sketch vector is broken into 15 two-dimensional
subvectors. Then, discrete grid structures (in the
example, 15 two-dimensional grids) are built and
subvectors are assigned to grid cells, so that close
subvectors are grouped in the same grid cells. This
process essentially performs a locality-sensitive
hashing of high-dimensional time series vectors,
where close vectors are discovered by searching for
pairs of vectors, which are represented together in a
high number of grid cells. Since this can output false
positives, the candidate pairs are explicitly verified by
computing the actual distance between them.
This outlines four main steps of the algorithm:
Sketching: computation and partitioning of
sketches;
Collocation: grouping together all time series
assigned to the same grid cell;
Correlation: finding frequently collocated pairs as
2
https://flink.apache.org/
ADITCA 2019 - Special Session on Appliances for Data-Intensive and Time Critical Applications
682

Figure 3: The four main steps of the time series correlation discovery algorithm, implemented as parallel stateful streaming
operators, with intermediate shuffles of data.
candidates for correlation;
Verification: computing the actual correlation of
each candidate pair to filter out false positives.
To provide prediction capabilities, an additional step
trains a regression model that takes into account the
correlates of time series that are considered of interest
for prediction and called “targets”. Only correlated
pairs that involve at least one target time series are
considered for discovery. All correlates of a target are
considered as predictors and passed to a linear
regression model, which approximates the target as a
linear function of its correlates.
4 IMPLEMENTATION
The implementation involves four stateful streaming
operators (Figure 3), each processing incoming tuples
in the context of the current window, taking into
account the current state of the window. Thanks to the
flexible API of the streaming engine that provides
low level primitives for implementing custom
operators, each operator can process incoming tuples
on-the-fly and hence emit resulting tuples as early as
possible. This guarantees a real pipelined flow of data
that allows for outputting early results.
4.1 Data Input and Output
All tuples processed by the streaming engine must
contain associated timestamps. The schemas of the
input stream and the two output streams are as
follows:
Input stream
o timestamp timestamp
o tsId string
o value float
Basic output stream
o timestamp timestamp
o tsId1 string
o tsId2 string
o correlation float
Extended output stream
o timestamp timestamp
o target string
o predictors string[]
o coefs float[]
For input data tuples, timestamp identifies the point
in time, for which the value of a particular time
series (tsId) is taken. Examples can be product price
at a given moment, volume of sales for a given time
unit (say 1 minute), etc. For the method to work
correctly, each time series must have value at each
timestamp. If such is not provided, the sketching
operator will assume repetition of the last value.
Normally, time units should be aligned to data update
frequencies.
Basic output tuples show pairs of identifiers of the
time series (tsId1 and tsId2), which were found to
be highly correlated at the window, represented by the
provided timestamp, together with the Pearson
correlation coefficient.
For the regression extensions, each of the
extended output tuples shows the approximation of a
specific target, as a list of its predictors and the
corresponding coeficients for each predictor in
the linear model. Thus, the next value of target can
be predicted as function of predictors, using the
formula:
(1)
where n is the number of predictors, P
i
is the next
value of the time series whose identifier is stored in
predictors[i-1], C
i
is the regression coefficient
of P
i
stored in coefs[i], and C
0
is the intercept of
the linear regression model stored in coefs[0].
The arrays predictors and coefs are actually
output as pipe-separated list of values. For example,
the following output tuple:
target: "Demand",
predictors: "Price|Discount|Precip",
Parallel Streaming Implementation of Online Time Series Correlation Discovery on Sliding Windows with Regression Capabilities
683
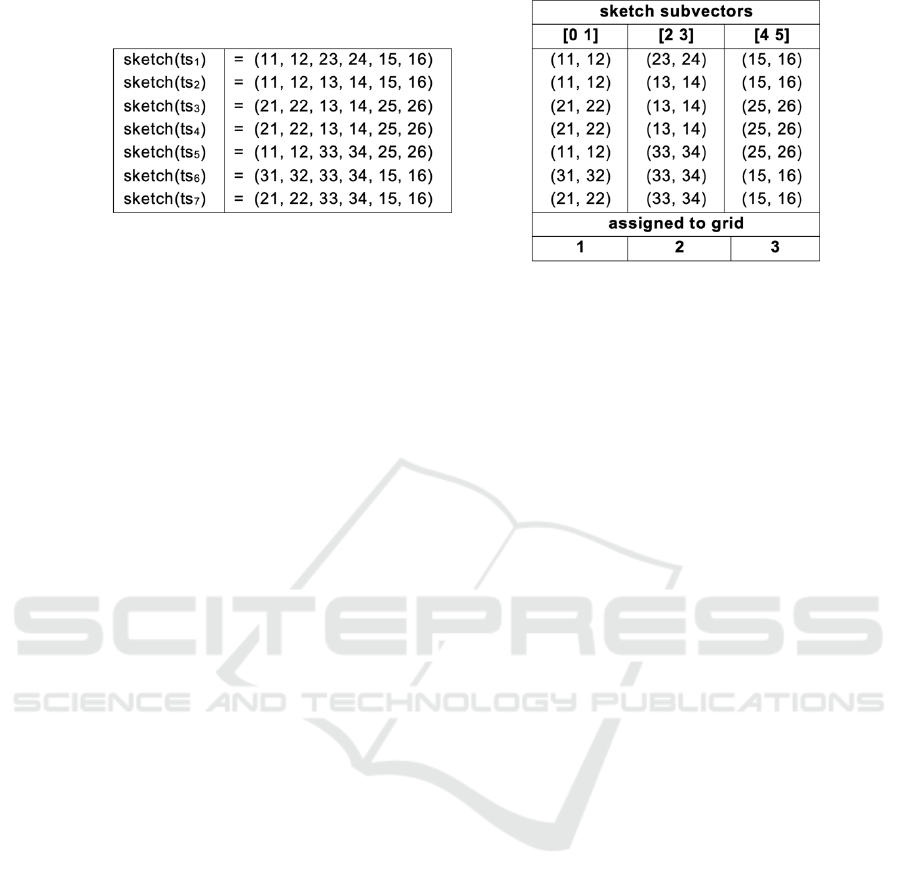
(a) a sample of time series sketches (b) sketch partitioning
Figure 4: The sketching operator computes sketches at each sliding window and assigns time series (identifiers) to grid cells.
coefs: "1.3|3.9|2.5|-0.7"
says that the next value of demand can be
approximated once the values of price, discount, and
precip are known, with the following expression:
Demand ~= 1.3 + 3.9*Price
+ 2.5*Discount - 0.7*Precip
4.2 Model Parameters
The model can be configured by a number of
parameters, which can be roughly divided in two
groups: functional parameters and method
parameters.
Functional parameters are determined by the
application requirements. Sliding windows are
defined in terms of size of the window (windowSize)
and size of a basic window (windowSlide, the step
at which a sliding window advances). For example, if
we consider a time unit of one minute, a basic window
of size 5 and a window of size 60, this means that
method execution will be triggered every 5 minutes
and will run on time series data for the last 60
minutes. Other functional parameters are the desired
correlation threshold minCorr (e.g., the application
needs all pairs with Pearson correlation above 0.9)
and the searchInverse flag that indicates whether
highly negative correlations (e.g., less than -0.9) are
to be also discovered. The optional targets
parameter is a regular expression that specifies the
identifiers of target time series; the simplest form is a
pipe-separated list of time series identifiers that will
be considered as targets.
Method parameters can control the tradeoff
between efficiency (the time to response at each
window slide) and accuracy (what percentage of all
highly correlated pairs will be discovered). That is
mostly determined by the grid cell size and the
candidate threshold, i.e. the minimum number of
grids, in which two time series should be collocated
in order to be considered as candidates for correlation.
Larger grid cells (i.e. more time series assigned to the
same cell) and lower candidate threshold lead to
higher number of candidate pairs to process (slower
execution), but lower probability to miss a true
positive (higher accuracy). Another important
parameter is the sketch size, which determines the
reduced dimensionality and can also control the same
tradeoff (lower dimensional sketch vectors lead to
faster execution, but also to lower probability of
preserving the distances). If linearSearch is set to
true, an exhaustive search through all possible pairs
will be done, instead of running the sketching
method, hence all other method parameters will be
ignored. Linear search is also parallelized, but much
slower, as it naively explores the full search space.
However, it guarantees to discover 100% of the
correlations, so might be the preferred method for
applications with a smaller number of time series that
need exact responses. This parameter has also been
used for comparing and evaluating the performance
benefits of the sketching method and its accuracy
tradeoff.
The model parameters are summarized below:
Functional parameters:
o windowSize integer
o windowSlide integer
o minCorr float
o searchInverse boolean
o targets string
Method parameters:
o sketchSize integer
o cellSize float
o threshold integer
o linearSearch boolean
4.3 Streaming Operators
Figure 3 depicts the algorithm workflow across the
ADITCA 2019 - Special Session on Appliances for Data-Intensive and Time Critical Applications
684
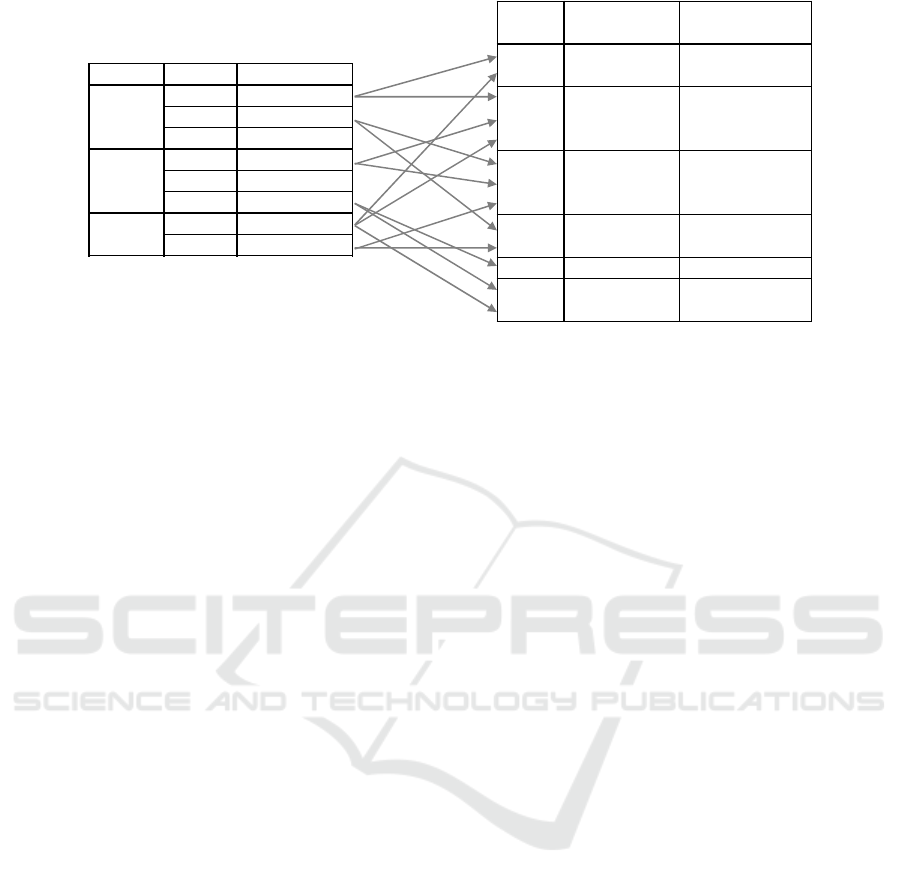
(a) each grid cell contains the ids of
collocated time series
(b) candidate clusters are explored for
frequently collocated time series ids
Figure 5: The collocation and correlation operators explore grid cells to identify candidate pairs.
streaming operators. The parallelization of the
algorithm is quite straightforward – sketches of time
series vectors on parallel data streams are computed
in parallel, which is followed by an additional shuffle
step that groups together the identifiers of time series
that fit in the same grid cell; then groups are explored
for discovering frequent pairs. Since the streaming
engine operates in a distributed environment,
operators have multiple instances, handling different
partitions of data in parallel. This requires shuffles of
intermediate data across operator instances and the
partitioning is based on a key from the schema of the
intermediate dataset. In figures, we use the
Key=>Value notation to show which fields are used
as partition keys.
4.3.1 Sketching
The first operator consumes the incoming data,
represented as a stream of (timestamp, tsId, value)
tuples. Its incoming data partitioning ensures that all
values of the same time series id (tsId) are routed to
the same operator instance.
First, the operator identifies sliding windows and
at each window computes the sketch of each time
series. This computation is done incrementally, i.e. at
each slide of the window, the sketches are simply
incrementally updated (instead of recomputed),
taking into account only the difference compared to
the previous position of the sliding window. Since the
method requires that sketches be computed on
normalized vectors, means and standard deviations
are computed (also incrementally) for each sliding
window. Then, they are applied directly in the
formula for computing the sketches, which results in
sketch values as if computed on a normalized
window.
As a running example, let us consider seven time
series with sketches as shown on Figure 4a. Each
sketch vector is partitioned into three pairs
(subvectors). The i
th
pair of the sketch vector for each
time series s goes to a grid i. The values of the i
th
pair
determine where in that grid the identifier s is placed.
Thus, each time series id is associated to exactly 3
grid cells – one at each grid (Figure 4b). Each cell is
identified by cellId, composed by the grid index and
the two dimensions of the grid cell. After this
processing, the sketching operator emits these
associations as (cellId, tsId) pair tuples.
4.3.2 Collocation
The second operator uses cellId as key and groups in
partitions all time series identifiers that belong to the
same cell (Figure 5a). Then, for each identifier in a
partition, the operator emits a key-value pair that
maps the time series identifier to its relevant part of
the partition (Figure 5b). The relevant part of a
partition with respect to a time series t consists of t
itself and the time series with identifiers higher than
t. We call that a “candidate cluster of time series”.
Clusters with just one element are ignored, because
pairs cannot be derived out of them. If the targets
parameter is specified, a filter is applied so that only
those key-value tuples that correspond to targets be
emitted at this step.
4.3.3 Correlation
The third operator uses tsId as key and for each time
TS ID TS clusters candidate pairs
(f ≥ 2/3)
ts
1
ts
1
, ts
2
, ts
5
ts
1
, ts
2
, ts
6
, ts
7
ts
1
, ts
2
ts
2
ts
2
, ts
5
ts
2
, ts
3
, ts
4
ts
2
, ts
6
, ts
7
ts
3
ts
3
, ts
4
, ts
7
ts
3
, ts
4
ts
3
, ts
4
, ts
5
ts
3
, ts
4
ts
4
ts
4
, ts
7
ts
4
, ts
5
ts
5
ts
5
, ts
6
, ts
7
ts
6
ts
6
, ts
7
ts
6
, ts
7
ts
6
, ts
7
grid cell TS IDs
1
(11, 12)
ts
1
, ts
2
, ts
5
(21, 22)
ts
3
, ts
4
, ts
7
(31, 32)
ts
6
2
(13, 14)
ts
2
, ts
3
, ts
4
(23, 24)
ts
1
(33, 34)
ts
5
, ts
6
, ts
7
3
(15, 16)
ts
1
, ts
2
, ts
6
, ts
7
(25, 26)
ts
3
, ts
4
, ts
5
Parallel Streaming Implementation of Online Time Series Correlation Discovery on Sliding Windows with Regression Capabilities
685

Figure 6: The architecture of the streaming operators, with all intermediate streams. The correlation and verification operators
keep copies of the current window of raw time series data, needed for computing the actual correlations.
series identifier t explores its associated candidate
clusters to find those time series ids that are
frequently collocated with t. In the example on Figure
5b, three pairs satisfy the given candidate threshold f
(i.e. they are seen together in the same cell in 2 out of
3 grids) and are hence considered as candidates for
correlation.
To facilitate the next step, the Correlation operator
keeps a copy of the current window of time series raw
data (Figure 6), partitioned by identifier. This assures
that every candidate pair (ts
i
, ts
j
) will be collocated
with the raw time series (data
i
) of ts
i
at the same
operator instance, since the candidate pair is keyed by
ts
i
. Thus, each instance of the Correlation operator
performs a join between its candidate pairs and the
local partition of the raw time series table and emits
the triplet (ts
j
, ts
i
, data
i
).
4.3.4 Verification
Each candidate (ts
j
, ts
i
) emitted by the Correlation
operator must be now explicitly verified by
computing the actual Pearson correlation between the
two time series to check whether it satisfies the
desired correlation threshold. This requires another
lookup into the original time series window, in order
to get the raw time series (data
j
), this time of ts
j
. For
this reason, the Verification operator also keeps a
copy of the current window of time series raw data,
this time having ts
j
as key (Figure 6). Finally, the
correlation of (data
i
, data
j
) is computed and, if higher
than the threshold, the candidate is emitted to the
correlations output.
4.3.5 Regression
The Verification operator makes sure that the data
processed by it is already partitioned by target time
series id, i.e. all the predictors of a particular target,
together with their data for the last window, are
collocated at the same instance with the target. This
3
http://commons.apache.org/proper/commons-math/
userguide/stat.html
avoids additional shuffles of intermediate data and
makes it easy for Regression to train a linear
regression model for each of the target time series,
consuming immediately the output of the Verification
operator. So, Regression is stateless and is simply
implemented as a class that operates within the
Verification operator (R box of Figure 6). The
implementation uses the Statistics package of the
Apache Commons Math library
3
.
5 CONCLUSIONS
We presented a parallel streaming implementation of
the ParCorr method for window correlation discovery
on time series data, enhanced with regression
capabilities, in the context of the CloudDBAppliance
project. The implementation leverages the
development of custom streaming operators that
boosts the performance and minimizes the response
time by optimizing intra-operator communication and
utilizing pipelining of intermediate data. As a subject
to further work, we will study experimentally the
performance benefits of this implementation,
compared to other streaming architectures, with
respect to latency of the first results and response time
of the entire output at each time window.
ACKNOWLEDGEMENTS
This work has been partially funded by the European
Union's Horizon 2020 Programme, project
CloudDBAppliance, grant 732051.
REFERENCES
Ahmad, Y., Berg, B., Cetintemel, U., Humphrey, M.,
Hwang, J., Jhingran, A., Maskey, A., Papaemmanouil,
ADITCA 2019 - Special Session on Appliances for Data-Intensive and Time Critical Applications
686

O., Rasin, A., Tatbul, N., Xing, W., Xing, Y., Zdonik,
S., 2005, Distributed Operation in the Borealis Stream
Processing Engine. ACM SIGMOD International
Conference on Management of Data (2005), pp 882–
884.
CDBA, 2019. The CloudDBAppliance Project. http://
clouddb.eu
Cole, R., Shasha, D., Zhao, X., 2005. Fast Window
Correlations over Uncooperative Time Series. In:
Proceedings of the International Conference on
Knowledge Discovery and Data Mining (SIGKDD).
ACM, pp 743–749.
Gulisano, V., Jimenez-Peris, R., Patino-Martinez, M, C.
Soriente, C., Valduriez, P., 2012. Streamcloud: An
Elastic and Scalable Data Streaming System. IEEE
Trans. Parallel Distrib. Syst. 23(12), pp 2351–2365.
Pu, C., Schwan, K., Walpole, J., 2001. Infosphere Project:
System Support for Information Flow Applications.
SIGMOD Record 30(1) (2001), pp 25–34.
Yagoubi, D.-E., Akbarinia, R., Kolev, B., Levchenko, O.,
Masseglia, F., Valduriez, P., Shasha, D., 2018. ParCorr:
Efficient Parallel Methods to Identify Similar Time
Series Pairs across Sliding Windows. Data Mining and
Knowledge Discovery, vol. 32(5), pp 1481-1507.
Springer.
Parallel Streaming Implementation of Online Time Series Correlation Discovery on Sliding Windows with Regression Capabilities
687
