
Output Control and Disturbances Compensation using Modified
Backstepping Algorithm
D. E. Konovalov
1a
, S. A. Vrazhevsky
1,2 b
, I. B. Furtat
1,2 c
and A. S. Kremlev
1d
1
Faculty of Control Systems and Robotics, ITMO University, Kronverksky av. 49, St. Petersburg, Russia
2
The Laboratory “Control of Complex Systems”, Institute for Problems in Mechanical Engineering of the Russian Academy
of Sciences (IPME RAS), V.O. Bolshoi pr., 61, St. Petersburg, Russia
Keywords: Backstepping, Auxiliary Loop Method, Robust Control, Disturbance Observer, Output Control, Mismatched
Disturbances.
Abstract: The article deals with a problem of output control for linear systems under unknown mismatched disturbances.
This algorithm is based on the modified backstepping method and the auxiliary loop method. The proposed
control scheme is a robust approach intended to unknown mismatched disturbances estimation and
compensation. Efficiency of the method is verified by computer modelling and practical approbation of the
algorithm using a laboratory platform called "Twin Rotor MIMO System".
1 INTRODUCTION
Backstepping is one of the widely used methods in
the control theory, because of the wide applicability
area and high accuracy achieving without high-gain
methods usage (Fradkov et al, 2013). This method is
proposed in (Kokotovic, 1992). One of the main
features of the backstepping approach is an
opportunity to deal with nonlinear plants, which can
be uncontrollable by classical linear controllers along
with systems that are not feedback linearizable. For
example, in (Kokotovic, 1992) the case of “peaking
effect” is considered to demonstrate the weakness of
high-gain control. On the other hand, the
backstepping is not easy to implement in practice,
because the algorithm synthesis requires an iterative
calculation and consecutive analysis of Lyapunov
functions for each separate state equation to provide
a control law. In addition, in (Fradkov et al, 2013) it
is discussed that backstepping-based approaches
require to design a set filters in control system, which
increases the order of the closed-loop system and
enlarge a set of parameters needed to be tuned. Many
modifications of the backstepping are designed to
provide a more simple structure and enlarge the
a
https://orcid.org/0000-0002-9973-8202
b
https://orcid.org/0000-0001-9725-5330
c
https://orcid.org/0000-0003-4679-5884
d
https://orcid.org/0000-0002-7024-3126
application area by using adaptive and robust
solutions (Krstic et al, 1995) (Nikiforov, 1997),
(Queiroz et al, 2014), (Zhou et al, 2009), (Furtat and
Tupichin, 2016), (Vrazhevsky, 2018). Another
drawback of the algorithm is the loss in stability under
unknown mismatched disturbances presence. In
(Furtat et al, 2015) it is shown that the backstepping
provides the stability only in the case when external
mismatched disturbances supposed to be known.
Design of control techniques that took into
account mismatched (unmatched) disturbances
presence is a standalone and intense developing area
in last years because of its high practical value. In
(Yang et al, 2017) authors discuss the set of practical
cases where mismatched disturbances have
significant influence. These cases include, for
example, power converter systems (Zhang et al,
2015), (Wang J. et al, 2017). There are three common
way of solutions can be considered: disturbance
observer based control (DOBC), active disturbance
rejection control (ADRC) and sliding mode control
(Aranovskiy et al, 2007), (Li S. et al, 2016), (Gao,
2006), (Wang X. et al, 2016), (Li G. et al, 2016),
(Chang, 2016), (Yu P. et al, 2016), (Aparicio et al,
2016), (Han et al, 2009). Backstepping based
Konovalov, D., Vrazhevsky, S., Furtat, I. and Kremlev, A.
Output Control and Disturbances Compensation using Modified Backstepping Algorithm.
DOI: 10.5220/0007918505170522
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 517-522
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
517

methods to deal with mismatched disturbances are
presented in (Furtat et al, 2015), (Sun, 2015). The
similar solution is also designed in (Yang et al, 2017).
In current research, a relatively new robust approach
to control plants under mismatched disturbances by
using a combination of backstepping technique and the
auxiliary loop method. The auxiliary loop algorithm is a
simple and effective method to disturbances
compensation that was first presented in (Tsykunov,
2007). This approach is a robust variation of the reference
model methods, which makes it more convenient to
work with complex unknown non-modelable dynamics
compared to adaptive approaches like augmented error
techniques or high order tuners (Astolfi et al, 2007). The
advantage of the auxiliary loop algorithm is the ability
to simply evaluate and compensate an undesired
dynamics produced by a wide class of external and
internal disturbances with unknown amplitude without
using high-gain elements in control loop. There are a
number of works consider the application of the
auxiliary loop method in various fields (Belyaev et al,
2013), (Fradkov and Furtat, 2013), (Furtat and Chugina,
2016). However, in the original form, the method does
not compensate mismatched disturbances, which is
demonstrated in (Furtat et al, 2015).
Current research address to the problem of
mismatched disturbances compensation is solved by
using a control algorithm based on both the modified
backstepping algorithm (Furtat, 2009) and the auxiliary
loop method by (Tsykunov, 2007). In (Furtat, 2009) the
modification leads to significant reducing of regulator
degree is proposed. Based on this result, the algorithm
called Modified Backstepping Algorithm with
Disturbances Compensation (MBADC) is proposed in
(Furtat et al, 2015) and ensures unknown mismatched
disturbances compensation. In (Furtat et al, 2017) the
method is applied for linear systems under unknown
bounded delays in state vector. Currently, the
applicability of MBADC in linear systems is limited
by the assumption that the state vector of the plant is
known along with the fact that only stabilization task
is considered in previous works.
This paper deals with the tracking output control
problem for linear plants under unknown bounded
mismatched disturbances. The control system
synthesis consists of n steps. The first state equation
is analysed separately, then the similar calculations
hold for other state variables, and, on the last step, the
control law is introduced. This analysis technique
corresponds to the backstepping procedure
(Kokotovic, 1992). As a modification, the auxiliary
loop method is used in each step to estimate the value
of undesired dynamics and compensate it by
including obtained estimates in control law with
reverse sign. As a result, high robustness towards the
disturbances in each state equation is obtained
(regardless of whether there is a real control signal in
particular state equation or not).In addition, the
practical approbation of the obtained algorithm using
the real laboratory platform called «Twin Rotor
MIMO System» is considered.
The paper is organized as follows. The problem
statement is presented in Section 2. The synthesis of
output control MBADC algorithm is proposed in
Section 3. In Section 4 the efficient of the algorithm
is illustrated by computer modeling along with results
of practical approbation using laboratory stand. The
conclusion is given in Section 5.
2 PROBLEM STATEMENT
Consider a linear system defined by
n1 n1
0
0
,
0
00
10...0 ,
I
x
xuH
b
yx
(1)
where
()
n
x
tR
is the state vector which is not
available for measurement,
()ut R
is a control
signal,
()yt R
is an output signal of the system,
0b
is an unknown constant,
(, )
n
x
fR
is an
unknown bounded function of external disturbances
and undesired internal dynamic produced by
parametric uncertainties,
H
is a lower triangular
matrix,
n
f
R
is a vector of unknown parameters.
Function
(, )
x
f
is assumed to be bound (or
bounded on t and Lipschitz in x).
The control goal is
,,
ref
yy tT
(2)
where
ref
y
is a reference signal,
0
is a required
accuracy,
0T
is a transient time.
3 THE ALGORITHM SYNTHESIS
Introduce the auxiliary loops as systems
1
,1,1,
,
iiii
nnn
zczxin
zczu
(3)
that correspond to each state equation of (1)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
518

1
,1, 1,
,
ii i
nn
xx i n
xbu
(4)
where
()
i
zt
are state vector variables that represent
the desired dynamic of (1) in case
() 0
i
t
,
()
i
x
t
is an estimate of the state vector,
0,
i
c
are
positive numbers. Comparing (3) and (4), consider a
set of mismatch errors and observation errors
,1,,
iii
ezi n
(5)
,2,,
iii
x
xi n
(6)
where
()
i
t
are mismatch errors,
()
i
et
are tracking
errors between the desired and the existing dynamic
of corresponding state vector variable,
()
i
t
are
observation errors. Each error
i
,
i
,
i
e
can be
defined and tended to small enough zero
neighborhood consistently in n steps.
3.1 Step 1
The first tracking error
1
()et
is defined as
11
.
ref
ex
y
(7)
The derivative of the mismatch error
1
()t
takes
the form
11112
.cz
(8)
where
11ref
y
is a new disturbance function
for the first state equation. From (8) it follows that the
function
1
()t
can be estimated by
11112
.cz
(9)
Expression (9) yields to represent the first state
equation by
121112
.ex cz
(10)
According to the backstepping procedure, assume
that
2
()
x
t
is a virtual control signal in (10) and there
exist virtual control law
1
v
such that if
21
x
v
then
the dynamics of (10) satisfies the goal (2). Introduce
the first virtual control law by
1111
,vc
(11)
where
1
()t
is an estimate of the function
1
()t
.
Substituting (11) into (10), we get
11121
,ece
(12)
where
111
is an estimation error.
3.2 Step
,2,-1ii n
The following calculations hold for each state
equation of (4) with
2, 1in
. Tracking errors take
the form
1
2, 1,,
iii
inexv
(13)
where
1
()
i
vt
is the virtual control law defined at the
previous step in the form
111
.
iiii
vc
(14)
Taking into account (4), the ith tracking error can
be represented as
1
,
ii i
ex
(15)
where
1iii
v
is a new disturbance function
for ith state equation. From (3)-(6) and (15) it follows
1
,1, 1.
iiiii
cz i n
(16)
From (16) it follows that the function
i
can be
rewritten by
1
.
iii ii
cz
(17)
Expression (17) yields to represent the ith
tracking error equation by
11
.
ii ii ii
ex cz
(18)
Assume that
1
()
i
x
t
is a virtual control signal in
(18) and there exist virtual control law
i
v
such that if
1ii
x
v
then the dynamics of (18) satisfies the goal
(2) by tending the error (13) to zero. The ith virtual
control law can be introduced by
ˆ
,
iiii
vc
(19)
Where
ˆ
()
i
t
and
()
i
t
are estimates of the
functions
()
i
t
and
()
i
t
respectively.
Substituting (19) into (18) we get
1
,
iiiiiii
ece c
(20)
where
iii
is an estimation error.
Output Control and Disturbances Compensation using Modified Backstepping Algorithm
519

3.3 Step
n
The tracking error of n-th state equation is defined by
1
,
nnn
exv
(21)
where
1
()
n
vt
is the virtual control law defined on
the previous step. Taking into account (4), the n-th
tracking error can be represented in the form
,
nn
ebu
(22)
where
1nnn
v
is a new disturbance function
for n-th state equation. From (3)-(5) and (22) it
follows
().
nnnn
cz b u
(23)
From (23) it follows that the function
()
n
t
can
be rewritten by
().
nnnn
cz b u
(24)
Expression (24) yields to represent the n-th
tracking error equation by
.
nnnn
eczu
(25)
From (25) it follows that the control law can be
introduced by
ˆ
1
().
nn n
uc
(26)
where
ˆ
()
n
t
and
()
n
t
are estimates of the
functions
()
i
t
and
()
n
t
respectively.
Substituting (26) into (25) we get
,
nnnnnn
ecec
(27)
where
nnn
is an estimation error.
To estimate unknown signals
()
i
t
,
()
i
t
and
()
i
x
t
the following dirty differential filter (DDF)
()
1
p
Wp
p
(28)
where
0
is a small enough number. The choice
of the parameter
determines the rate of transients
in the observers by increasing the overshoot
parameter.
3.4 Theorem
There exist constants
0
i
c
, 1,in , and
0
0
such that for any
0
0
the control system
consisting of auxiliary loops (3), virtual control laws
(11), (19), control law (26) and observers (28)
provides goal (2) for plant (1).
The proof of the theorem is similar to one from
(Furtat et al, 2017) with additional consideration
dynamics of observation errors
()
i
t
. Efficiency of
proposed algorithm is demonstrated by the following
example.
4 MODELLING
The following model is used to test the algorithm via
computer simulation
2
1
22
12
2
3
(1 0.5 sin( ))
()sin()
10sin( )
010 0 100
001 0 010 ,
000 1 001
3
(0) 1 ,
1
tx
fxxt
x
x
xu f
x
(29)
Auxiliary loops are defined by
10 0 0 10 0
010 001 0
00 1 000 1
zzxu
(30)
In the simulation the following parameters of the
observer and the coefficients of the auxiliary circuit
is used:
0.01,
2,
1
5,c
2
3.5,c
3
3.c
The transients of the closed-loop system in
stabilization mode are demonstrated on Fig. 1. Fig. 2
shows the transient in the tracking mode with
sin( 0.5 ) 2 sin(2 )
ref
tty
.
Figure 1: The result of simulation of control algorithms for
the stabilization mode.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
520
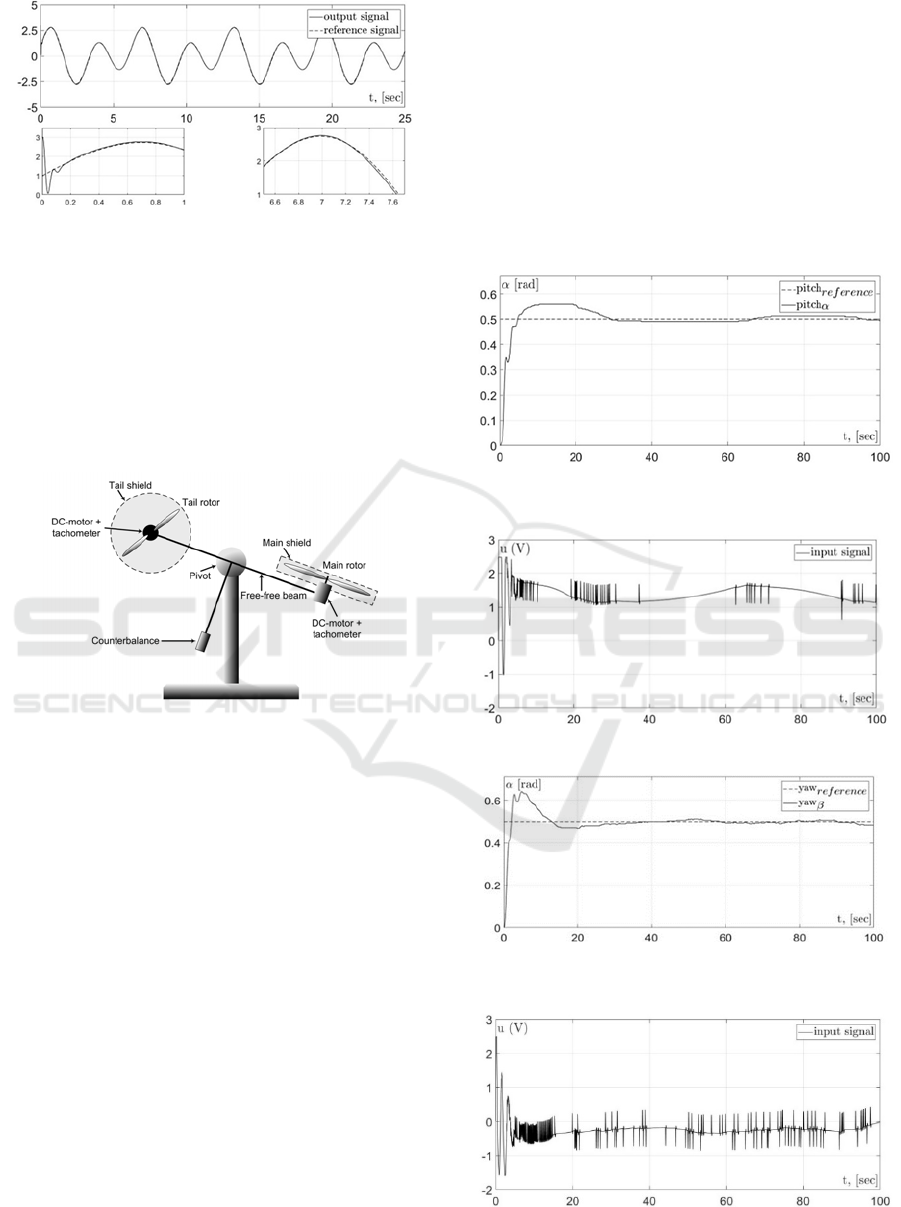
Figure 2: The result of simulation of control algorithms in
tracking mode.
To demonstrate the efficiency of the algorithm in
practical task, the laboratory plant called “Twin Rotor
MIMO System” (TRMS) is used. TRMS is a helicopter-
like system that can be represented by linear model with
an unknown nonlinear function of undesired internal and
external influences and two-channel independent
control for each degree of freedom. General view of
TRMS is presented in Figure 3.
Figure 3: Laboratory plant "Twin Rotor MIMO System".
The plant dynamics is described by the following system
() () () (), (0) 0,
() (),
d
xt Axt But ftx
yt Lxt
(31)
where
0100
12.354 2.774 0 0
0001
0001.56
,A
00
0.847 0
00
00.046
,B
1000
,
0010
L
()
d
ft
is an unknown function
of external disturbances supposed to be bounded,
y
(
is a pitch angle of the beam ,
is
a yaw angle of the beam). A voltage supplied to the
DC motors is used as a control action.
The following parameters of the observer and the
auxiliary loop are used for the synthesis of the control
system:
0.01,
2.5,
1
0.4,c
2
0.2.c
Fig.
4-7 show the transients of the pitch angle, yaw angle
and control signals supplied to DC motors.
5 CONCLUSIONS
This paper demonstrates a robust approach to output
tracking control for plants under unknown
mismatched disturbances. The algorithm is based on
the backstepping method and the auxiliary loop
method. The simulations show the high quality of
transients and a high accuracy of regulation in the
steady state. Experimental results illustrate that
accuracy in steady state is comparable to TRMS
resolution of encoders – up to 0.02 rad.
Figure 4: Transients and steady state of pitch angle
stabilization.
Figure 5: Control signal for pitch subsystem.
Figure 6: Transients and steady state of yaw angle
stabilization.
Figure 7: Control signal for yaw subsystem.
Output Control and Disturbances Compensation using Modified Backstepping Algorithm
521

ACKNOWLEDGEMENTS
The work in Section 4 is supported by Goverment of
Russian Federation (Grant 08-08). The reported study
of algorithm synthesis in Section 3 was funded by
RFBR according to the research project № 18-38-
20037.
REFERENCES
Aparicio, A., Castaños, F., Fridman, L., 2016. Output
feedback sliding‐mode control with unmatched
disturbances, an ISS approach. International Journal of
Robust and Nonlinear Control, 26(18), 4056-4071.
Aranovskiy, S., Bobtsov, A., Kremlev, A., Nikolaev, N., Slita,
O., 2007. Identification of frequency of biased harmonic
signal. IFAC Proceedings Volumes, 40(13), 167-172.
Astolfi, A., Karagiannis, D., Ortega, R., 2007. Nonlinear
and adaptive control with applications. Springer
Science & Business Media.
Belyaev, A. N., Smolovik, S. V., Fradkov, A. L., Furtat, I. B.,
2013. Robust control of electric generator in the case of
time-dependent mechanical power. Journal of Computer
and Systems Sciences International, 52(5), 750-758.
Chang, J. L., 2016. Sliding mode control design for
mismatched uncertain systems using output
feedback. International Journal of Control,
Automation and Systems, 14(2), 579-586.
Fradkov, A. L. V., Furtat, I. B., 2013. Robust control for a
network of electric power generators. Automation and
Remote Control, 74(11), 1851-1862.
Fradkov, A. L., Miroshnik, I. V., Nikiforov, V. O., 2013.
Nonlinear and adaptive control of complex systems
(Vol. 491). Springer Science & Business Media.
Furtat I. B, 2009. Modified Algorithm of Robust Integrator
Backsteping. Mekhatronika, Avtomatizatsiya,
Upravlenie. (10), 2-7. (In Russ.)
Furtat, I. B., Chugina, J. V., 2016. Robust adaptive control
with disturbances compensation. IFAC-PapersOnLine,
49(13), 117-122.
Furtat, I., Furtat, E., Tupichin, E. A., 2015. Modified
backstepping algorithm with disturbances compensation.
IFAC-PapersOnLine, 48(11), 1056-1061.
Furtat, I. B., Vrazevsky, S. A., Kremlev, A. S., Gushchin,
P. A., 2017. Robust control algorithm under
mismatched disturbances. 9th International Congress
on Ultra Modern Telecommunications and Control
Systems and Workshops (ICUMT) (pp. 61-66). IEEE.
Furtat, I. B., Tupichin, E. A., 2016. Modified backstepping
algorithm for nonlinear systems. Automation and
Remote Control, 77(9), 1567-1578.
Gao, Z., 2006. Active disturbance rejection control: a
paradigm shift in feedback control system design.
American control conference (pp. 7-pp). IEEE.
Han, X. R., Fridman, E., Spurgeon, S. K., 2009. Output
feedback sliding mode control of time delay systems
with bounded disturbances. In Proceedings of the 48h
IEEE Conference on Decision and Control (CDC) held
jointly with 2009 28th Chinese Control Conference (pp.
8417-8422). IEEE.
Kokotovic, P. V., 1992. The joy of feedback: nonlinear and
adaptive, IEEE Control Systems, vol. 12, no. 3, pp. 7-17
Krstic, M., Kanellakopoulos, I., Kokotovic, P. V., 1995.
Nonlinear and adaptive control design (Vol. 222, pp.
490-491). New York: Wiley.
Li, G., Wang, X., Li, S., Yang, J., Chen, X., 2016. Output
consensus of double-integrator multi-agent systems
with mismatched disturbances via SMC and GPIO.
55th Conference on Decision and Control (CDC) (pp.
3468-3473). IEEE.
Li, S., Yang, J., Chen, W. H., Chen, X., 2016. Disturbance
observer-based control: methods and applications.
CRC press.
Nikiforov, V. O., 1997. Modified adaptive controller for
linear plants with improved parametric robustness and
transient performance. European Control Conference
(ECC) (pp. 1213-1218). IEEE.
Queiroz, K., Dias, S., Araujo, A., 2014. Modular variable
structure adaptive backstepping controller: Design and
stability analysis. Journal of the Franklin Institute,
351(4), 2089-2106.
Sun, H., Li, S., Yang, J., Zheng, W. X., 2015. Global output
regulation for strict-feedback nonlinear systems with
mismatched nonvanishing disturbances. International
Journal of Robust and Nonlinear Control, 25(15),
2631-2645.
Tsykunov, A. M., 2007. Robust control algorithms with
compensation of bounded perturbations. Automation
and Remote Control, 68(7), 1213-1224.
Vrazhevsky S.A., 2018. Output Control of Nonlinear Systems
Using Modified Backstepping Algorithm with Disturbances
Compensation. SPIIRAS Proceedings, 58, 182-202.
Wang, X., Li, S., & Lam, J., 2016. Distributed active anti-
disturbance output consensus algorithms for higher-
order multi-agent systems with mismatched
disturbances. Automatica, 74, 30-37.
Wang, J., Zhang, C., Li, S., Yang, J., Li, Q., 2017. Finite-
time output feedback control for PWM-based DC–DC
buck power converters of current sensorless
mode. IEEE Transactions on control systems
technology, 25(4), 1359-1371.
Yang, J., Zhang, C., Li, S., Niu, X., 2017. Semi‐global
exquisite disturbance attenuation control for perturbed
uncertain nonlinear systems. Asian Journal of
Control, 19(4), 1608-1619.
Yu, P., Shtessel, Y., & Edwards, C., 2016. Continuous
higher order sliding mode control with adaptation of air
breathing hypersonic missile. International Journal of
Adaptive Control and Signal Processing, 30(8-10),
1099-1117.
Zhang, C., Wang, J., Li, S., Wu, B., Qian, C., 2015. Robust
control for PWM-based DC–DC buck power converters
with uncertainty via sampled-data output
feedback. IEEE Transactions on Power
Electronics, 30(1), 504-515.
Zhou, J., Wen, C., Wang, W., 2009. Adaptive backstepping
control of uncertain systems with unknown input time-
delay. Automatica, 45(6), 1415-1422.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
522
