
Development and Implementation of Grasp Algorithm for Humanoid
Robot AR-601M
Kamil Khusnutdinov
1 a
, Artur Sagitov
1 b
, Ayrat Yakupov
1 c
, Roman Meshcheryakov
2 d
,
Kuo-Hsien Hsia
3 e
, Edgar A. Martinez-Garcia
4 f
and Evgeni Magid
1 g
1
Department of Intelligent Robotics, Higher Institute for Information Technology and Intelligent Systems,
Kazan Federal University, 35 Kremlyovskaya street, Kazan, Russian Federation
2
V.A. Trapeznikov Institute of Control Sciences of Russian Academy of Sciences, 65 Profsoyuznaya street, Moscow, 117997,
Russian Federation
3
Department of Electrical Engineering, Far East University, Zhonghua Road 49, Xinshi District, Tainan City, Taiwan
4
Universidad Autonoma de Ciudad Juarez, Cd. Juarez Chihuahua, 32310, Mexico
Keywords:
Algorithm, Grasp Planning, Hand Pose Detection, Humanoid Robot.
Abstract:
In robot manipulator control, grasping different types of objects is an important task, but despite being a subject
of many studies, there is still no universal approach. A humanoid robot arm end-effector has a significantly
more complicated structure than the one of an industrial manipulator. It complicates a process of object
grasping, but could possibly make it more robust and stable. A success of grasping strongly depends on
a method of determining an object shape and a manipulator grasping procedure. Combining these factors
turns object grasping by a humanoid into an interesting and versatile control problem. This paper presents a
grasping algorithm for AR-601M humanoid arm with mimic joints in the hand that utilizes the simplicity of
an antipodal grasp and satisfies force closure condition. The algorithm was tested in Gazebo simulation with
sample objects that were modeled after selected household items.
1 INTRODUCTION
In the field of manipulator control a process of grasp-
ing an object is a serious research problem. There is
a growing interest in finding solutions of this problem
that could be implemented for any humanoid robot.
The area of humanoid robots application is extensive
as they can work in variety of environments, including
factories or social events. A sheer variety of objects
that need to be manipulated by humanoids in different
environments is daunting, considering differences in
objects characteristics, such as shape, size and weight.
In order to successfully grasp an object, a robot
hand must adapt to particular characteristics of the
a
https://orcid.org/0000-0001-5699-1294
b
https://orcid.org/0000-0001-8399-460X
c
https://orcid.org/0000-0001-9977-2833
d
https://orcid.org/0000-0002-1129-8434
e
https://orcid.org/0000-0003-1320-673X
f
https://orcid.org/0000-0001-9163-8285
g
https://orcid.org/0000-0001-7316-5664
object. Also a robot need to consider environmental
conditions when performing grasping actions. Clut-
ter in a grasping area (Zhu et al., 2014) hinders ob-
ject detection, correct pose estimation and evaluat-
ing characteristics of the object’s surface. In addi-
tion, it is required to consider a possibility that sur-
face characteristics of an object may change under
some conditions. For example, it may become wet
or be deformed due to compression of the object by
robot fingers. In such cases, interaction between the
robot hand and the object surface may change sporad-
ically. These limitations should be considered during
planning of a grasping action. A solution of objects
grasping by a humanoid should include the follow-
ing steps: obtaining information about a target object,
evaluating grasping position(s), and planning move-
ments (possibly, solving inverse kinematics problems
for fingers and hand).
Usually, a grasping scene is represented as a 3D
point cloud, which is further used to extract various
data about a target object (Lippiello et al., 2013).
Evaluating position and orientation of the target ob-
Khusnutdinov, K., Sagitov, A., Yakupov, A., Meshcheryakov, R., Hsia, K., Martinez-Garcia, E. and Magid, E.
Development and Implementation of Grasp Algorithm for Humanoid Robot AR-601M.
DOI: 10.5220/0007921103790386
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 379-386
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
379

ject can help determining a type of grasp routine to
be used (Huang et al., 2013). In addition, perform-
ing shape estimation enables to use predefined rep-
resentation of objects, e.g., in a form of geometric
primitives (Herzog et al., 2014), and then to use pre-
calculated grasp point(s). Using representation of the
target object as a 3D point cloud, simple antipodal
grasps could be generated (Pas et al., 2017). More-
over, if a hand is not able to reach a required grasping
position, the robot could attempt performing a small
pushing/pulling movement in order to relocate an ob-
ject inside the robot hand’s workspace.
Various criteria could be employed for estimating
a grasp quality (Roa and Su
´
arez, 2015), (Feix et al.,
2013). For example, it could be a degree of fixation
rigidity of an object in a hand (Chalon et al., 2013).
A grasp should be stable and robust, i.e., an object
should not move freely in a grasping hand. Addition-
ally, grasping and manipulation should always con-
sider a possibility of occlusion (Romero et al., 2013).
This paper presents a grasp algorithm for hu-
manoid robot AR-601M (Magid and Sagitov, 2017),
which fingers are constructed with mimic joints. The
algorithm provides an antipodal grasp and satisfies
force closure condition using mimic joints. It was
tested in simulation within Gazebo environment us-
ing a 3D model of the right arm of humanoid robot
AR-601M. The tests utilized synthetic objects that
were constructed using their physical prototypes in
real world, which will be further used for the algo-
rithm experimental validation with the real robot.
The rest of the paper is organized as follows. Sec-
tion 2 presents a literature review. Section 3 describes
kinematics of AR-601M humanoid robot arm and its
right arm workspace. Section 4 describes the grasp
algorithm implementation. Section 5 presents the re-
sults of Gazebo simulation using 3D models of AR-
601M right arm and the synthetic objects. Finally, we
conclude and discuss future work in Section 6.
2 LITERATURE REVIEW
This section briefly familiarizes a reader with grasp
planning strategies and approaches, techniques for
their implementation and methods of grasp evalua-
tion.
Selecting an optimal grasp from all possible alter-
natives is a challenging problem and there are a num-
ber of approaches. Empirical approaches, for exam-
ple, are searching for the best grasp in available exper-
imental data utilizing criteria based on target object
features. Authors of data-driven based grasp synthe-
sis review revealed interrelation with analytical meth-
ods (Bohg et al., 2014) and identified existing grasp-
ing open problems. The main difficulty lies in the de-
sign of the appropriate structure representing known
object grasps in terms of robot perception that will fa-
cilitate further search and synthesis. The need for suf-
ficiently big prior data to achieve a high success rate is
one of the biggest disadvantages, however, simulation
can be used to generate necessary data.
To solve the problem of generating a stable and ro-
bust grasp, authors in (Lin and Sun, 2015) presented
an approach to a grasp planning that can reconstruct a
simplified human grasp strategy (represented by grasp
type and thumb positioning) observing human’s ac-
tions in similar manipulation. A learned strategy is a
represention of a recipe to do manipulation with ob-
jects of a particular geometry. The integration of such
strategies into grasp planning procedure acts as a con-
straint on a search space, thus allowing planning to be
computed much faster, still providing sufficient space
not restricting arm agility. A resulting approach inte-
grating a set of learned strategies was compared with
the GraspIt! grasp planner, which doesn’t utilize sim-
ilar constraints. A comparison between approaches
showed that the proposed approach generates grasps
much faster. Generated grasps were similar in con-
figurations to human operations. Paper didn’t include
tests on novel objects, therefore it is not possible to
determine if the approach can be extended to a new
class of objects.
Hand trajectories, captured during object grasp-
ing tasks by human subjects, was used to define
and evaluate a set of indicators that were further
used to determine and transfer optimal grasp to
robot hand(Cordella et al., 2014). Based on the
Nelder–Mead simplex method indicators estimates
the optimal grasp configuration for a robotic hand,
considering the limitations that arise when determin-
ing the grasp configuration. Using cross-cylinder as a
target object grasp task was executed by the six hu-
man subjects. The advantages of the proposed al-
gorithm are that it has a reduced computational cost.
With its help it possible to identify and extract quan-
titative indicators to describe the optimal grasp poses
and their reproduction by humanoid robot’s hand. It
can predict the final hand position after the movement
and the optimal configuration of the fingers for grasp
execution as soon as it is provided with information
about the size of an object and its location. Its disad-
vantage is that it strongly depends on the similarity of
the robotic hand with the human hand, and is that it
does not consider possible slippage of the hand during
the grasp an object.
The paper (Bullock et al., 2013) presents a classi-
fication scheme for humanoid arm manipulations.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
380

Taxonomy is defined on various manipulation behav-
iors according to the nature of the contact with exter-
nal objects and the movement of an object. It allows
defining simple criteria that can be applied together in
order to easily classify a wide range of manipulation
behavior for any system in which the hand can be de-
fined. It is argued that the dexterous movements of
the hand can offer an expanded workspace manipula-
tion and improved accuracy with reduced energy con-
sumption but at the cost of added complexity. The ad-
vantage of the proposed classification scheme is that
it creates a descriptive structure that can be used to
effectively describe hand movements during manipu-
lation in various contexts and can be combined with
existing object-oriented or other taxonomies to pro-
vide a complete description of a particular manipula-
tion task. Its disadvantage is that during the manipu-
lations it implies the obligatory movement of the hand
and does not consider situations in which the manip-
ulations can be carried out by the movement of the
fingers only, with a fixed hand.
To solve the problem of analyzing the movement
of arms, paper (W
¨
org
¨
otter et al., 2013) presented an
ontology tree for manipulation tasks based on se-
quences of graphs where each graph represents the
relationship between various manipulated objects ex-
pressed in adjacency to each other. The ontology tree
can also be used as a powerful abstraction used in
robotic applications to represent complex manipula-
tion as a set of simple actions (called a chain of se-
mantic events) The advantage of presented ontology
is that it allowed determining about 30 types of fun-
damental manipulations, obtained as a result of an at-
tempt to structure manipulations in space and time. Its
disadvantage lies in the fact that to determine the sim-
ilarity of types of manipulations, an average thresh-
old value of similarity of species equal to 65% was
used, which generally demonstrates not high accuracy
in determining the difference between species.
The article (Dafle et al., 2014) proposed 12 pos-
sible types of grasps, with the help of which it is
possible to carry out manipulations under the influ-
ence of external forces. An object is manipulated
through precisely controlled fingertip contacts, con-
sidering non-hand resources. The advantage of the
proposed solution is that it allows carrying out ma-
nipulations in conditions close to real conditions, in
comparison with situations in which the manipulation
is carried out with static hands. And in that it allows
looking at the process of making manipulations from
a different point of view, going beyond the tradition-
ally considered clever manipulations. The disadvan-
tage is that among the presented types of grasp there
are no grasps identical to human grasps.
During the generation of grasps, there can en-
counter with a problem of determining a grasp strat-
egy that is capable of ensuring the compatibility of
an object definition tasks and the implementation of
its grasp, as well as capable of ensuring adaptability
to new objects. To solve this problem, an investiga-
tion (Sahbani et al., 2012) of analytical and empiri-
cal approaches to the construction of a grasp strategy
presents a review of algorithms for synthesizing the
grasp of three-dimensional objects. The advantage of
the article is that its authors managed to find a pos-
sible problems solution that consists in introducing
into the work of the robot the ability to autonomously
identify the signs of a new object, with the help of
which it can understand what object is in front of it.
Its disadvantages include the absence of various sim-
ulations of grasp using information about the cases in
which each of the approaches is most applicable.
An approach (Pham et al., 2015) for evaluating
contact forces based only on visual input data pro-
vided by a single RGB-D camera aims to solve the
problem of estimating forces applied by hand to an
object. The input information is extracted using vi-
sual tracking of the hand and an object to assess their
position during the manipulation. After that, the kine-
matics of hand movement is calculated using a new
class of numerical differentiation operators. Further
the estimated kinematics is fed into the program that
returns the desired result: the minimum distribution
of force along with an explanation of the observed
movement. The advantage of the proposed approach
is the ability of solving the problem of determining
the contact points of a hand and an object when strong
occlusions occurred, using an approach based on the
assumption that the closed fingers remain in their last
observed position until they are visible again. Its dis-
advantage is that it cannot solve the problem of de-
termining contact points when performing clever ma-
nipulation, with moving a finger or sliding, due to the
fact that it uses the above presented assumption that
is not fair in the case of dexterous manipulations.
In a multitude of manipulation scenarios, a robot
may come into collision with objects of unknown
shape: as they rotate, they will remain symmetrical.
For such objects, there is no known three-dimensional
model. The problem arises of assessing the 3D pos-
ture and the shape of such objects, which prevents one
from understanding what this object is. To solve this
problem, the paper (Phillips et al., 2015) proposes
an algorithm for the simultaneous evaluation of the
posture and shape of an object without using cross-
sections. The solution uses the properties of the pro-
jective geometry of the surface of revolution. It re-
stores the three-dimensional pose and shape of an ob-
Development and Implementation of Grasp Algorithm for Humanoid Robot AR-601M
381

ject with an unknown surface of rotation from two
points of view: suitable types of known, relative ori-
entation. The advantages of the proposed algorithm
are that it can work even when only one of the two
visible contours of the surface of revolution and that
it is suitable for determining the posture and shape of
transparent objects, providing clear contours of such
objects. Information about whether the algorithm can
estimate the position of an object of a similar object
and restore its shape from noisy images is not pro-
vided.
During the manipulation, one potential problem
is the arrangement of feedback acquisition from the
hand. To solve this problem, the authors of the paper
(Cai et al., 2016) presented the hypothesis that for ac-
curate recognition of manipulations, it is necessary to
model the types of hands and attributes of objects be-
ing manipulated. The paper presents a unified model
for evaluating the manipulation of the hand and an ob-
ject, in which the observation of the manipulation is
performed from a wearable camera. From the areas
of the hand detected on one image, the type of grasp
is recognized, and its attributes are determined from
the detected parts of an object. The nature of the ma-
nipulation is determined by the relationship between
the type of grasp and the attributes of an object, rep-
resenting a set of beliefs about them embedded in the
model. The paper provides a model estimate for the
correlation between the type of grasp and shape of an
object. The advantage of the model is that it exceeds
the traditional model that does not consider the inter-
relation of such semantic constraints as the type of
grasp and the attributes of an object. Its disadvantage
is that it has an average recognition accuracy of the
type of grasp at 61.2%.
3 AR-601M ARM KINEMATICS
Each arm of AR-601M humanoid robot has 20 de-
grees of freedom (DOF), where 7 DOFs correspond
to the arm and 13 DOFs correspond to the five fin-
gers of an arm. The fingers are designed with mimic
joints in all phalanges but proximal. The 3D robot
model is constructed in a Gazebo simulator environ-
ment (Shimchik et al., 2016). Figure 1 demonstrates
a 3D model of AR-601M humanoid right arm, which
is an exact replica of the real robot right arm. The
robot model was integrated into the Robot Operating
system (ROS) and MoveIt! motion planner frame-
work. RRTConnect algorithm was chosen for tra-
jectories planning in control of AR-601M arm move-
ments (Lavrenov and Zakiev, 2017).
The arm movement planning requires solving in-
Figure 1: A 3D model of AR-601M humanoid right arm.
verse kinematics (IK) problem first. Since ROS con-
tains a set of IK solvers, the solution of IK problem
was reduced to a suitable plugin selection that suited
our robot’s arm constraints and desired characteris-
tics. We selected k dl kinematics plugin, which is an
effective tool for solving IK for manipulators with 6
or more DOFs. Figure 2 shows a pre-grasp position
that was calculated with kdl kinematics plugin.
Figure 2: Pre-grasp position of AR-601M arm.
To apply the 3D model of AR-601M humanoid
right arm it is necessary to calculate its workspace
in order to prepare a scene and calculate the arm
movements. The workspace was calculated numeri-
cally through applying series of forward kinematics
cases until the representative density of workspace
reachable (by the end effector) points was achieved.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
382

We used Matlab environment and Robotics Tool-
box (Corke, 2017) to calculate reachable workspace
of AR-601M right arm (Fig. 3).
Figure 3: Reachable workspace of AR-601M right arm that
was calculated in Matlab environment.
4 GRASPING ALGORITHM
Because of designing a humanoid hand as a set of fin-
gers, some grasp algorithms for humanoids include
calculation of contact points (Yu et al., 2017), (V Le
et al., 2010). For our algorithm we assume that it
is possible to execute a reliable grasp using simple
approach without calculating contact points, since it
is enough to apply basic forces to an object surface
within the plane (similarly to antipodal grasp execu-
tion). At this stage, an object may not be rigidly fixed
in the hand yet, but it will not fall out of the grasp.
Next, the robot completes the grasp applying addi-
tional forces and performing flexion of the remain-
ing fingers. The advantage of the algorithm is that
it avoids contact points calculation. Its disadvantage
is that depending on a generated handle location, the
flexion of the ring and the pinkie fingers could be ex-
ecute outside of the object. Therefore, it is not always
possible to satisfy the force closure condition.
4.1 Obtaining Object Data from a Point
Cloud
Before grasping an object it is necessary to find out in-
formation that will allow the grasping. To obtain such
information various tools could be used, but most of
these tools employ a 3D point cloud as a source for
further data extraction. The idea behind is that ob-
jects and a scene of manipulation are represented as a
combination of a large number of 3D points that are
located very close to each other. A point cloud could
be obtained with RGBD cameras, image depth sen-
sors or motion sensors, which are used as image depth
sensors. They allow receiving both a color image and
its 3D representation in a form of a 3D point cloud.
Figure 4 shows a point cloud for 3D models of ob-
jects (a bottle and a ladle) that were obtained with
Microsoft Kinect sensor within Gazebo simulator.
Figure 4: 3D models of bottle (top) and ladle (bottom) rep-
resented as 3D point clouds.
4.2 Objects Description and Grasp
Geometry
Various tools that allow extracting data (which is nec-
essary in order to grasp an object) from a 3D point
cloud, could provide data about contact points and
their coordinates in 3D space, an area from which
an object should be extracted, and objects geome-
try. Next, the extracted data is used for grasp exe-
cuting. Some tools can generate grasps, but typically
these are simple antipodal grasps, which are carried
out by a two-finger gripper with the fingers moving in
the same plane and driven by a prismatic joint. ROS
package handle detector (Pas and Platt, 2014) is a
tool that extracts data about an object from a scene by
analyzing objects surface (represented as a 3D point
cloud), identifies and visualizes an area of the object
(referred as a handle) that should be grasped. Each
handle is represented with a set of cylinders with their
own parameters, providing handle-related data that
includes handle position, orientation, radius and ex-
Development and Implementation of Grasp Algorithm for Humanoid Robot AR-601M
383
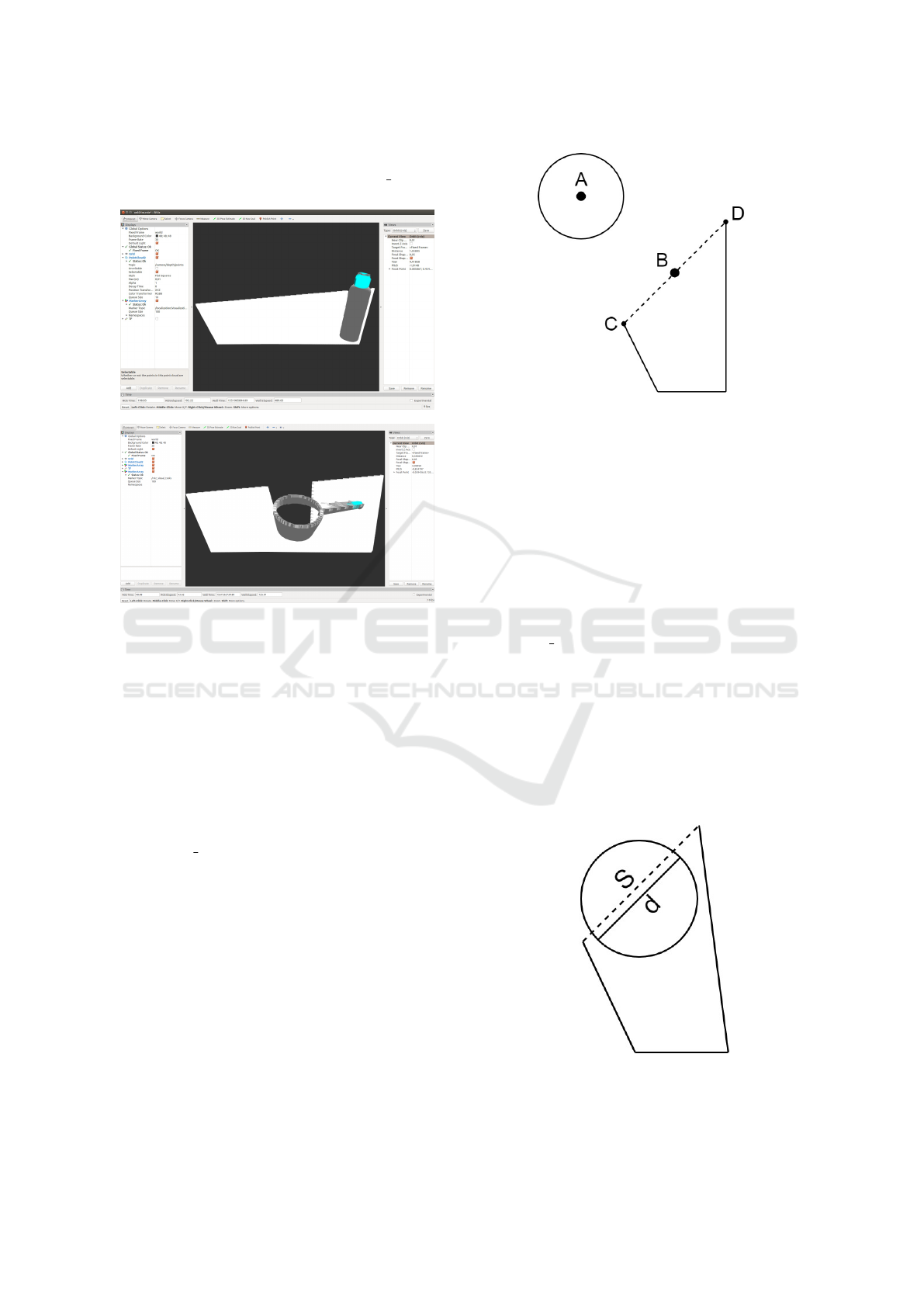
tent. Figure 5 shows handles for 3D models of a bottle
and a ladle that were generated using handle detector
tool.
Figure 5: Handles for 3D models of a bottle (top) and a
ladle (bottom) are shown with cyan color.
4.3 Calculating a Target Pose of an
Object Grasping Hand
Before grasping an object it is necessary to find a tar-
get point for a hand that it needs to reach in order to
perform the antipodal grasp. When the hand reaches
its target position, an object should lie between the
thumb and the other fingers. The index finger was se-
lected as a pair for the thumb in the antipodal grasp.
With handle detector tool this corresponds to a situ-
ation where the hand reaches its target point, and thus
handle center coordinates (point A) should align with
point B. To implement this idea, the coordinates of
thumb tip (point C) and index tip (point D) in their de-
fault positions (an open antipodal gripper) are deter-
mined. Next, coordinates of point B are determined
and subtracted from coordinates of point A in order
to calculate a displacement vector. To determine co-
ordinates of the hand target point, the displacement
vector coordinates are added to the coordinates of the
current hand position. Figure 6 visualizes these an-
tipodal grasp geometry calculation.
Figure 6: Components for calculation a target point for a
hand. A is a center of a handle, B is a point that is equidistant
from tips of a thumb and an index fingers, C is a tip of the
thumb, D is a tip of the index finger.
4.4 Determining Positions of Fingers to
Grasp an Object
Each finger tip position is determined with calcula-
tions of finger joints’ rotation angles. Since the joints
are mimic, this reduces to calculating rotation angles
for active joint of a finger, which is a first joint. Us-
ing handle detector tool we obtain diameter d of a
handle’s cylinder. Next, thumb and index fingers flex-
ing is simulated and distance S between their tips
is tracked and compared to d, resulting into optimal
mimic joint rotation angles selection that minimizes
the difference between d and S. To calculate mimic
joint rotation angles of other fingers, it is necessary to
consistently increase the angles of their active joints
and select the ones that help satisfying the force clo-
sure condition. Figure 7 visualizes these calculations.
Figure 7: Calculating rotation angles: d is a handle diame-
ter, S is a distance between thumb and index tips.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
384

5 SIMULATION OF GRASPING
AN OBJECT
The grasp algorithm for the AR-601M humanoid us-
ing handle detector tool consists of the following se-
quence of actions:
1. Estimate coordinates of a handle’s center;
2. Use coordinates of fingertips that are in an open
state to calculate a point that is equidistant from
the fingertips;
3. Subtract coordinates of the point founded in Step
2 from the handle’s center coordinates, find the
hand offset vector coordinates;
4. Add the coordinates of Step 3 to current hand po-
sition coordinates, find coordinates of a new hand
target position that is necessary to grasp an object;
5. Estimate trajectory of grasp fingers’ flexion to cal-
culate distances between fingertips and the han-
dle’s circumference. Active joints’ angles that are
minimizing the difference between the distance
between the fingertips and the handle circumfer-
ence are the required angles of flexion required to
grasp the object.
The algorithm was verified in virtual experiments
that were performed in Gazebo simulation. Five dif-
ferent models of real world objects were tested: a bot-
tle, a rectangular box of vitamins, a juice box, a ladle
and a plastic cup without a handle. Figure 8 shows
virtual experiments of grasping 3D models of a bottle
and a ladle by AR-601M humanoid robot using the
proposed grasping algorithm.
6 CONCLUSION AND FUTURE
WORK
We presented the development and implementation of
a grasping algorithm for AR-601M humanoid robot
that utilizes a simplicity of an antipodal grasp and
satisfies force closure condition using mimic joints.
The algorithm was tested in Gazebo simulation en-
vironment with five different synthetic objects that
were constructed using their physical prototypes in
real world. Our approach’s advantages and disadvan-
tages were discussed. As a part of our future work
we plan to validate the algorithm in real world envi-
ronment with AR-601M humanoid for execution of
pick and place operations. RGBD sensor will be used
to provide the 3D point cloud data for the algorithm.
One of the particular tasks that will be implemented
using the proposed algorithm is door handle grasp-
ing and door opening. This is a necessary task of
(a) (b)
(c)
Figure 8: Grasping objects with the proposed algorithm (a),
(b) a bottle; (c) a ladle.
AR-601M humanoid in victim search mission within
household environment that is a part of our large-scale
project in robotized urban search and rescue.
ACKNOWLEDGEMENTS
The reported study was funded by the Russian Foun-
dation for Basic Research (RFBR) according to the
research project No. 19-58-70002. Part of the work
was performed according to the Russian Government
Program of Competitive Growth of Kazan Federal
University.
REFERENCES
Bohg, J., Morales, A., Asfour, T., and Kragic, D. (2014).
Data-driven grasp synthesis—a survey. IEEE Trans-
actions on Robotics, 30(2):289–309.
Bullock, I. M., Ma, R. R., and Dollar, A. M. (2013). A
hand-centric classification of human and robot dex-
terous manipulation. IEEE Transactions on Haptics,
6(2):129–144.
Cai, M., Kitani, K., and Sato, Y. (2016). Understanding
hand-object manipulation with grasp types and object
Development and Implementation of Grasp Algorithm for Humanoid Robot AR-601M
385

attributes. In Robotics conference: Science and Sys-
tems 2016.
Chalon, M., Reinecke, J., and Pfanne, M. (2013). Online in-
hand object localization. In 2013 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems,
pages 2977–2984.
Cordella, F., Zollo, L., Salerno, A., Accoto, D.,
Guglielmelli, E., and Siciliano, B. (2014). Human
hand motion analysis and synthesis of optimal power
grasps for a robotic hand. International Journal of
Advanced Robotic Systems, 11(3):37.
Corke, P. I. (2017). Robotics, Vision & Control: Fundamen-
tal Algorithms in MATLAB. Springer, second edition.
ISBN 978-3-319-54412-0.
Dafle, N. C., Rodriguez, A., Paolini, R., Tang, B., Srini-
vasa, S. S., Erdmann, M., Mason, M. T., Lundberg, I.,
Staab, H., and Fuhlbrigge, T. (2014). Extrinsic dex-
terity: In-hand manipulation with external forces. In
2014 IEEE International Conference on Robotics and
Automation (ICRA), pages 1578–1585.
Feix, T., Romero, J., Ek, C. H., Schmiedmayer, H., and
Kragic, D. (2013). A metric for comparing the anthro-
pomorphic motion capability of artificial hands. IEEE
Transactions on Robotics, 29(1):82–93.
Herzog, A., Pastor, P., Kalakrishnan, M., Righetti, L., Bohg,
J., Asfour, T., and Schaal, S. (2014). Learning of grasp
selection based on shape-templates. Auton. Robots,
36:51–65.
Huang, B., El-Khoury, S., Li, M., Bryson, J. J., and Billard,
A. (2013). Learning a real time grasping strategy. In
2013 IEEE International Conference on Robotics and
Automation, pages 593–600.
Lavrenov, R. and Zakiev, A. (2017). Tool for 3d gazebo map
construction from arbitrary images and laser scans.
In 2017 10th International Conference on Develop-
ments in eSystems Engineering (DeSE), pages 256–
261. IEEE.
Lin, Y. and Sun, Y. (2015). Robot grasp planning based
on demonstrated grasp strategies. The International
Journal of Robotics Research, 34:26–42.
Lippiello, V., Ruggiero, F., Siciliano, B., and Villani, L.
(2013). Visual grasp planning for unknown objects us-
ing a multifingered robotic hand. IEEE/ASME Trans-
actions on Mechatronics, 18(3):1050–1059.
Magid, E. and Sagitov, A. (2017). Towards robot fall de-
tection and management for russian humanoid ar-601.
In KES International Symposium on Agent and Multi-
Agent Systems: Technologies and Applications, pages
200–209. Springer.
Pas, A., Gualtieri, M., Saenko, K., and Platt, R. (2017).
Grasp pose detection in point clouds. The Interna-
tional Journal of Robotics Research, 36(13-14):1455–
1473.
Pas, A. and Platt, R. (2014). Localizing handle-like grasp
affordances in 3d point clouds. In The 14th Interna-
tional Symposium on Experimental Robotics, volume
109.
Pham, T.-H., Kheddar, A., Qammaz, A., and Argyros, A. A.
(2015). Towards force sensing from vision: Observing
hand-object interactions to infer manipulation forces.
In 2015 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 2810–2819.
Phillips, C. J., Lecce, M., Davis, C., and Daniilidis, K.
(2015). Grasping surfaces of revolution: Simultane-
ous pose and shape recovery from two views. In 2015
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 1352–1359.
Roa, M. A. and Su
´
arez, R. (2015). Grasp quality mea-
sures: review and performance. Autonomous Robots,
38(1):65–88.
Romero, J., Kjellstr
¨
om, H., Ek, C. H., and Kragic, D.
(2013). Non-parametric hand pose estimation with
object context. Image and Vision Computing, 31:555–
564.
Sahbani, A., El-Khoury, S., and Bidaud, P. (2012). An
overview of 3d object grasp synthesis algorithms.
Robotics and Autonomous Systems, 60:326–336.
Shimchik, I., Sagitov, A., Afanasyev, I., Matsuno, F., and
Magid, E. (2016). Golf cart prototype development
and navigation simulation using ros and gazebo. In
MATEC Web of Conferences, volume 75, page 09005.
EDP Sciences.
V Le, Q., Kamm, D., F Kara, A., and Y Ng, A. (2010).
Learning to grasp objects with multiple contact points.
In 2010 IEEE International Conference on Robotics
and Automation (ICRA), pages 5062 – 5069.
W
¨
org
¨
otter, F., Aksoy, E. E., Kr
¨
uger, N., Piater, J., Ude, A.,
and Tamosiunaite, M. (2013). A simple ontology of
manipulation actions based on hand-object relations.
IEEE Transactions on Autonomous Mental Develop-
ment, 5(2):117–134.
Yu, D., Yu, Z., Zhou, Q., Chen, X., Zhong, J., Zhang, W.,
Qin, M., Zhu, M., Ming, A., and Huang, Q. (2017).
Grasp optimization with constraint of contact points
number for a humanoid hand. In 2017 IEEE Interna-
tional Conference on Robotics and Biomimetics (RO-
BIO), pages 2205–2211.
Zhu, M., G. Derpanis, K., Yang, Y., Brahmbhatt, S., Zhang,
M., Phillips, C., Lecce, M., and Daniilidis, K. (2014).
Single image 3d object detection and pose estima-
tion for grasping. In 2014 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
3936–3943.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
386
