
Universal Encoding for Provably Irreversible Data Erasing
Marek Klonowski
1
, Tomasz Strumi
´
nski
2
and Małgorzata Sulkowska
1
1
Faculty of Fundamental Problems of Technology, Department of Computer Science,
Wrocław University of Science and Technology, Poland
2
BrightIT, Wrocław, Poland
Keywords:
Data Deletion, Provable Security, Formal Analysis.
Abstract:
One of the most important assumptions in computer security research is that one can permanently delete some
data in such a way that no party can retrieve it. In real-life systems this postulate is realized dependently on
the specific device used for storing data. In some cases (e.g., magnetic discs) the deletion/erasing is done
by overwriting the data to be erased by new one. Many evidence suggest that such procedure may be not
sufficient and the attacker armed with advanced microscopic technology is capable in many cases of retrieving
data overwritten even many times. In this paper we present a method that provides provable, permanent and
irreversible deletion of stored bits based solely on special encoding and processing of data. More precisely the
adversary learns nothing about deleted data whp. The security guarantees hold even if the attacker is capable
of getting bit-strings overwritten many times. Moreover, in contrast to some previous research, we do not
restrict type of data to be deleted.
1 INTRODUCTION
In many security related research it is often (silently)
assumed that any data can be deleted on demand. That
is, one can perform an action such that locally stored
data is instantly removed and no one can learn it any-
more. In many systems such deletion is in fact real-
ized in a way that some pointer representing physical
region of memory is marked as ready for being re-
used. Clearly, data deleted in such a way can be eas-
ily accessed using a special software as long as the re-
spective memory region has not been used yet. Thus,
more aware users aiming at irreversible deletion write
some (possibly) meaningless data on the critical re-
gion.
In the case of magnetic discs it has been quickly
noticed that overwriting the memory to be deleted
only once may be not sufficient, since the adversary
having access to more advanced techniques (mainly
microscopic) is capable of retrieving the original data
((Gomez R. D. et al., 1993; Gutmann Peter, 1996;
Hughes G. et al., 2009; Mayergoyz I. D. et al., 2001)).
As a consequence some more elaborated methods of
removing data has been suggested in (Gutmann Pe-
ter, 1996). Bulk of them are heuristics based on the
idea of overwriting region of the memory using a spe-
cial, usually alternating, patterns. The presented ideas
seem to be convincing and moreover in some cases
authors present some experimental examples show-
ing that after applying their methods retrieving data
is not possible given more or less advanced tech-
niques. However there is no formal proof that such
approach really works. Moreover, judging by secu-
rity discussions in (Gutmann Peter, 1996; Hughes G.
et al., 2009; US Department of Defense, 1997; U.S.
National Institute of Standards and Technology, 2006)
we cannot be sure what is the minimal sufficient num-
ber of layers overwriting the original one to assure ir-
reversibility of deletion.
To explain the nature of the problem let us recall
how data (or a single bit) is represented on the mag-
netic disc. For contemporary discs the width of the
path representing consecutive bits is approximately
150 − 200 nm, moreover, there are separating guard-
bands of width of 20 nm. The overwritten data can
be revealed because the new bit is not written to the
same physical location as the previous one. That is,
the physical mark representing a particular bit can be
slightly moved from its expected position whenever
we overwrite an old bit. The overview of this situation
is presented in Figure 1. This enables the adversary to
get in some cases the former, overwritten bit if only
he has access to a sufficiently sensitive device.
The physical mark has to be placed on a given po-
Klonowski, M., Strumi
´
nski, T. and Sulkowska, M.
Universal Encoding for Provably Irreversible Data Erasing.
DOI: 10.5220/0007922101370148
In Proceedings of the 16th International Joint Conference on e-Business and Telecommunications (ICETE 2019), pages 137-148
ISBN: 978-989-758-378-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
137
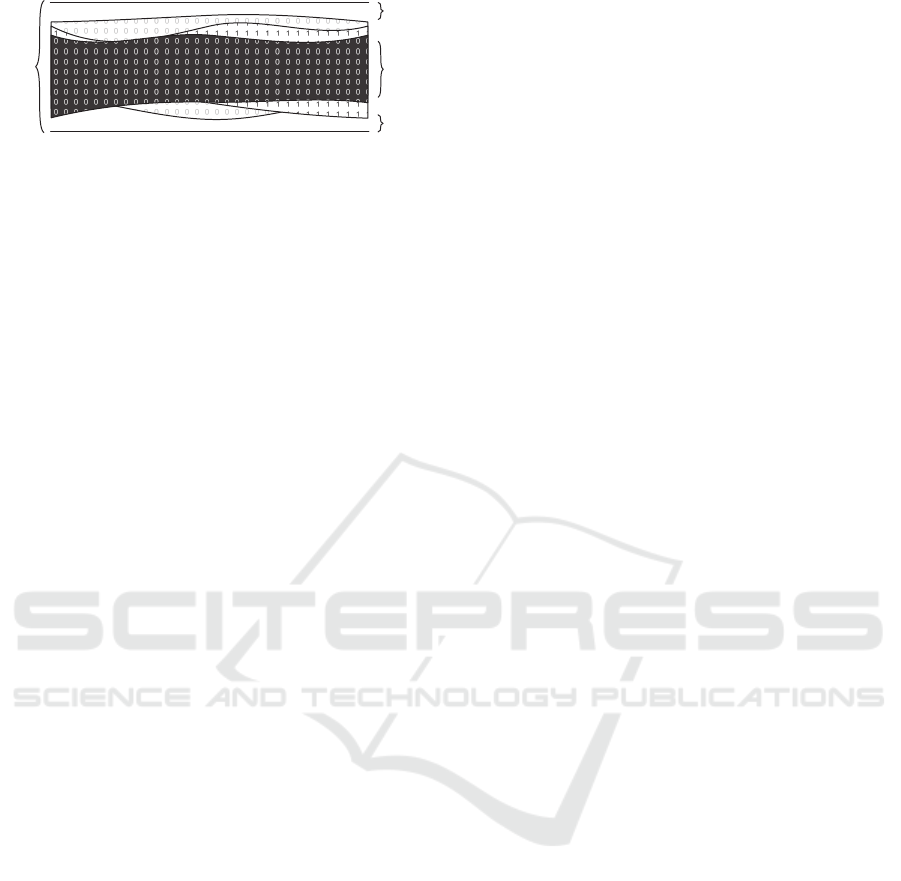
guardband
guardband
track
lastwrittenbit
Figure 1: Picture of a magnetic disc: black path represents
the current data (bit 0), while the white/grey the previous,
overwritten data 1 and 0.
sition in an extremely short time - therefore some in-
accuracies appear. This leads to possibility of retriev-
ing some data using technologies like MFM (mag-
netic force microscopy) that is an advanced form of
SPM (scanning probe microscopy, SPM) and makes
it possible to localize even extremely small magne-
tized scrap of the disc. As pointed in (Gomez R. D.
et al., 1993; Rugar D. et al., 1990) in many real-life
examples MFM is enough to read the data with suf-
ficient accuracy. There are even more sophisticated
methods like magnetic force scanning tunneling mi-
croscopy, MTM and spin-stand imaging (Gutmann
Peter, 1996). Moreover one can expect that in fore-
seeable future the adversary may have access to even
stronger diagnostic devices and use it against today’s
storage devices.
To sum up,
• one cannot be sure if someone could try to retrieve
deleted data from today’s devices in the future;
• due to dynamic progress in magnetic microscopy
techniques one cannot predict what devices can be
used to retrieve data in the future.
This does not mean that every single “overwrit-
ten” bit can be retrieved after arbitrary long time. It
means however that some bits can be retrieved after
long, unpredictable time and there is still a risk of un-
wanted and unexpected information leakage. Let us
also stress that if a single bit can be retrieved then it is
more likely that the neighboring bits can be retrieved
as well. Indeed, one may suspect that inaccuracies
in positioning of magnetic heads for close places can
be correlated. For that reason it is possible that the
adversary could get a meaningful part of contiguous
bits instead of an isolated (and probably useless) bits.
For these reasons the only fully reliable method sug-
gested at hand is the physical destruction of the (mag-
netic) device. Destroying the devices is not accept-
able, however, in most of areas of application.
Considered problem may be also solved using
disk encryption. One can always write sensitive data
in an encrypted form to the disk and store the appro-
priate key on, say, cryptographic chip. However, in
our approach we want to assume that no additional
devices (like chips) are necessary. We suggest an ap-
proach to data deletion based solely on a special data
encoding that guarantees provable security even in the
presence of an adversary capable of recognizing all
physical marks (i.e, all history) that were written in a
given place of the disc in the past. Note that it is a
very strong assumption - indeed, the adversary may
learn the data overwritten arbitrary number of times.
At first glance it seems that one cannot hide any infor-
mation from such a strong adversary. We show that it
is not true if we apply a special encoding and deletion
procedures.
The proposed methods is not restricted to mag-
netic discs and can be applied to different types of
data storage devices. Namely our analysis of secu-
rity is valid as long as some requirements described in
Section 2.1 are fulfilled. That is, our method is based
on a modified data representation/organisation and
potentially can be applied even in a future-generation
devices. In the case of wide class of standard devices
just by replacing the firmware.
On the downside our method leads to moderate
space overhead. More precisely the same device using
new encoding can represent less bits (say, two orders
of magnitude) when compared to the standard way
of using this device. Moreover the data processing
(writing and reading stored bits) may be one order of
magnitude slower. Let us also note that in some pub-
lications authors claim that the investigated concern
is overblown. Namely, they suggest that in recently
produced (extremely dense) magnetic data storage de-
vices data overwritten even once cannot be retrieved
in practice ( Gutmann P., 1996).
In summary, our method is rather not intended for
deleting all possible data. We imagine that the pro-
posed technique can be useful in the systems wherein
particularly sensitive data is processed but the users
can accept a longer processing time and loss of some
space. At this price we get a method of removing
the data that is provably secure even in the presence
of a very strong adversary. That is, we imagine that
the presented methods can be used for example for
data that needs to be particularly secured (e.g., cryp-
tographic material - including secret keys or seeds for
pseudo random number generators; data bases with
sensitive personal information; descriptions of new,
original industrial technologies etc.).
1.1 Related Work
There are many papers related to our results. In
(Gomez R. D. et al., 1993; Gutmann Peter, 1996;
Hughes G. et al., 2009; Mayergoyz I. D. et al., 2001)
one can find information about microscopic tech-
niques and properties of magnetic discs in the context
SECRYPT 2019 - 16th International Conference on Security and Cryptography
138

of data retrieval by a physical inspection.
Some practical methods of permanent data dele-
tion can be found in papers (Gutmann Peter, 1996;
Hughes G. et al., 2009; US Department of Defense,
1997; U.S. National Institute of Standards and Tech-
nology, 2006). All that papers assume overwriting the
original data several times using different patterns.
The only papers presenting formal analysis of data
deletion security we are aware of, are (Klonowski
et al., 2008) and (Klonowski et al., 2009) wherein
the encoding of the type presented below was intro-
duced (note however that the deletion method is sub-
stantially different). Those papers do not present fully
formal analysis and are limited to deletion of the data
from a very narrow type of distribution in contrast
to this paper wherein we present universal methods
that can be used for arbitrary types of data. More-
over some of our methods are much faster while some
other require optimal number of operations for getting
demanded level of security. In the mentioned papers
also a very strong adversary was considered, however
the analysis was completely different. Namely the se-
curity was considered only for hiding purely random
bit-string (that can be a good model of cryptographic
material including seeds for pseudo-random bits or
secret keys).
In the current paper we analyze security of wiping
of much wider classes of bit-strings to be securely re-
moved (including the case of data to be deleted from
an arbitrary source). We also use a different secu-
rity measure that seem to be more adequate for real-
life systems based on differential privacy notion in-
troduced by Dwork et al. in (Dwork et al., 2006a;
Dwork, 2006). Using these definitions gives us strong
security guarantees and repels so-called linkage at-
tacks as well as some other useful properties including
immunity against data post-processing (see e.g (Cyn-
thia Dwork and Aaron Roth, 2013)).
Let us note that there is a well-developed body of
recent papers about efficient data deletion that can be
seen as somehow related results. They are assuming,
however, substantially different models of adversary’s
acting and data storing methods.
Many recent papers discuss the problem of data
deletion in a distributed system (especially in clouds),
wherein each piece of data can be stored in several
copies and may be processed by various entities (e.g.
(Hur J. et al., 2017; Wegberg G. et al., 2017; Ali M.
et al., 2017; Bacis E. et al., 2016)). There are also
significant recent results about publicly verifiable data
deletion in multi-user systems (Yang C. et al., 2018;
Ali M. et al., 2017; Hao F. et al., 2016). In contrast
to our approach, all that paper are mainly based on
cryptographic techniques and assume that the users
have access to secure devices, such that the adversary
has no access to overwritten data.
Let us stress that the considered problem is sub-
stantially different than ORAM (Oblivious Ram) in-
troduced in (Goldreich and Ostrovsky, 1996) which
aims at obscuring the operations being performed
(read/write) in the past. This problem is orthogonal
to our considerations. That is, each ORAM we are
aware of, assumes that the adversary has access to
the current state of memory, only. The same refers
to the recent ORAM-related papers discussing dis-
tributed deletion (e.g. (Roche et al., 2016).
Finally let us mention also some effort in con-
structing devices to allowing mitigation of retrieving
deleted data or other unexpected information leakages
((Jia et al., 2016; Moritz C.A. et al., 2015)) . The pre-
sented method is nevertheless orthogonal to the ap-
proach presented in our paper, in particular, do not
assume such a strong adversary.
While preparing this paper we were inspired by
two other papers not related directly to data deletion
- the first one is (Rivest and Shamir, 1982) wherein
authors present how a write-once memory (the state
representing bit 0 can be changed into bit 1 but the in-
verse operation is not feasible) can be to some extent
re-used by using a special encoding. In paper (Moran
T. et al., 2009) authors present deterministic method
of storing results of voting preserving privacy of indi-
vidual voters even in the presence of extremely strong
adversary.
1.2 Organization of this Paper
In Section 2 we present principles of a special encod-
ing extensively used later. After that we present and
justify the assumed mathematical model of the data
storage device. Introducing such model allows us to
abstract from all physical properties in the security
analysis. Finally, we briefly describe how deletion
methods work. In Section 3 we begin with analysis
of our deletion methods for different types of data. In
Section 4 we present and analyze a modified protocol
with very fast (optimal) execution time. In Section 5
we conclude and present some future work.
2 MODEL AND ENCODING
In this section we describe our methods - we refer to
magnetic discs however it can be also used for any
other data storing devices as long as they meet as-
sumptions of the presented model. First, let us assume
that every piece of the disc can be marked with one of
Universal Encoding for Provably Irreversible Data Erasing
139
two states representing 0 or 1. We assume the follow-
ing four-phase life cycle of a data storage device.
Preliminary Phase - this phase covers all actions
(marking initial states representing 0 or 1) per-
formed before the storage device is given to the
user for storing data; this phase can be performed
by regular user or even the manufacturer.
Regular Usage Phase - we assume that in this phase
the user is able to write (i.e. re-use the space)
an arbitrary number of times, always is able to
read the data written last time and knows an upper
bound for the number of changes she introduced.
Deletion Phase - in a given moment the user is asked
to perform some actions to make reading the disc
impossible.
Adversarial Inspection Phase - the adversary is
given the disc and techniques to correctly say
what states (0 or 1) have been marked in each
piece of the disc. For example in the case of the
disc depicted in Figure 1 the adversary can learn
that the state represents 0 overwriting previous
state 1. Moreover the adversary sees that the
previous state 1 covers the initial state 0. Clearly,
such model is extremely strong.
2.1 Special Data Representation
The idea of coding is based on dividing physical space
of a magnetic disk into rectangle-like areas that we
call boxes. Depending on the implementation, each
box may contain the space of several to several dozens
of regular bits. In our coding each box represents a
single logical bit in the new encoding. Each box is
divided into two subspaces. The first, inner one, rep-
resents the value of the box (which is 0 or 1) and the
outer, surrounding the inner one, plays the role of a
border and always consists of the state representing
0. This idea is depicted in Figure 3 and compared to
regular encoding in Figure 2. A box that in our cod-
ing is represented by 1, has got the state representing
1 in the inner part. Analogically a box representing 0
has 0 state in the inner part. Since outer part of the
box has always got only 0s, then box representing 0
contains only the state representing 0. To avoid ambi-
guity of notation we shall call a box that represents 0
a 0-box and a box representing 1 a 1-box.
To change the value of a bit one just checks the
value of a box and changes the inner part. We assume
that in each box the adversary can learn the changes
of the value of the box (i.e. state of the inner part) but
cannot learn anything about one box from another
boxes. This separation property is guaranteed by suf-
ficiently large separation area. That is, we assume that
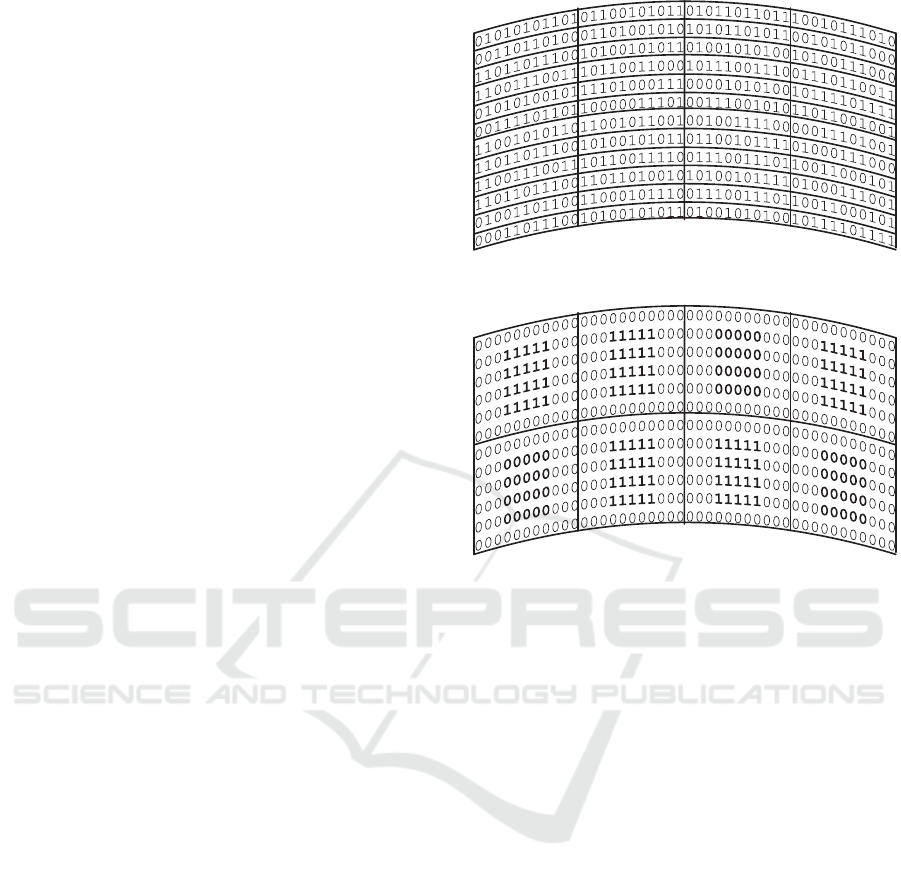
Figure 2: Physical representation of standard layout.
Figure 3: The same disc in the new encoding. It is divided
into boxes representing bits 1,1,0,1 (upper row), 0, 1, 1, 0
(lower row).
even maximal feasible misalignment during changing
the state of one box that may occur does not influence
other boxes. This is the only assumption related to
the physical nature of the device. The rest is based on
special encoding.
2.2 Encoding
Each box represents a single logical bit. There are two
rules of encoding:
• at the beginning all boxes are set to 0;
• the state of the box is changed only from 0 to 1 or
from 1 to 0.
The second rule implies that the algorithm before
storing new bit has to check if such operation is nec-
essary. If the current state of a given box is the same
as the bit to be stored the algorithm does nothing.
All algorithms in this model work as follows. In
the Preliminary Phase the new disc representing no
information is filled with 0-boxes. Then possibly each
box can be replaced some number of times from 0 to 1
and from 1 to 0 a number of times. Note that each box
can experience a different number of such changes.
In Regular Usage Phase the user changes states of
boxes to represent the data she needs to store. Read-
SECRYPT 2019 - 16th International Conference on Security and Cryptography
140

ing the data is just checking the inner part of respec-
tive box.
In the Deletion Phase each representation of each
box is changed a number of times (from 0 to 1, from
1 to 0, and so on). Note that the number of changes
cannot depend on the number of changes in previous
phases. That is, the user (in contrast to the adversary)
has no access to overwritten data.
Let us note that such model is simplified and de-
viates from the current methods of data processing.
Namely in the current systems the following holds:
• data buffering – in not a single bits yet a bunches
of bits at once,
• data encoding – in real life systems data are en-
coded before they are written (using for example:
MFM, RLL, PRLM or EPRLM encoding (Gut-
mann Peter, 1996)).
The difference is not negligible, however it is
clear that the model can be realized by changing the
firmware, only. The price the user has to pay is lim-
ited space and slower data processing.
Le us note that this encoding method is based on
idea from (Klonowski et al., 2008), however the al-
gorithms presented below are different. Moreover we
provide here a formal proves for security declared
properties according to a stronger definition.
2.3 Adversarial View
We assume that the adversary has an access to all
“layers” - that is, for each box it can recognize all
bits represented by this box in the past. Due to the
assumed encoding the only knowledge the adversary
has, is the number of changes. Thus the whole disc
can be represented as a vector (y
1
,y
2
,.. .,y
d
) where y
i
is the number of changes in the i-th box.
Clearly the assumption that having good micro-
scope one can retrieve the data in every single place
is not realistic but one can agree that it is an upper
bound for capabilities of any real adversary.
Note that the knowledge of the regular user is sig-
nificantly smaller - that is, she knows some upper
bound for the number of changes she introduced and
can only distinguish between 0-box and 1-box on the
last written layer. This means that she can only rec-
ognize the parity of y
i
. Indeed the regular user cannot
inspect overwritten layers even in the case of signifi-
cant head’s misalignment.
3 DELETION BY OBFUSCATION
- ANALYSIS
In this section we provide analysis of methods of data
obfuscation. As mentioned in previous sections all
methods for deletion in the described model are based
solely on overwriting alternatively 0 and 1 some num-
ber of times. Thus, each box is seen by the adversary
as a stack of 0s and 1s - some added by regular usage
and some other just added to mislead the adversary.
That is - the algorithms are simple, however the prob-
lem is to find how many times one has to change the
state to get the demanded security level, according to
the security definition given below.
Let us introduce some basic notation. For any nat-
ural number K, the set {0,1,... ,K} will be denoted
by [K]. For the set of natural numbers we use symbol
N. Let X = (X
1
,X
2
,.. ., X
d
) be a d-dimensional dis-
crete random variable representing data to be deleted
(more precisely the number of bit-flips performed
during Regular User Phase). Clearly they do not
have to be independent. Let S = (S
1
,S
2
,.. ., S
d
) de-
note the covering, i.e., the d-dimensional finite dis-
crete random variable whose role is to mask data X.
We assume that after the process of covering (during
Deletion Phase) the adversary can read Y = X + S =
(X
1
+S
1
,X
2
+S
2
,.. ., X
d
+S
d
) from the magnetic disk.
Thus the random variable Y
i
= X
i
+ S
i
denotes the
number of changes performed in the i-th box till the
end of Deletion Phase. We assume that X and S are
independent and denote their ranges by X and S , re-
spectively. Additionally, we assume that S
1
,S
2
,.. ., S
d
are independent and identically distributed. The last
assumption is motivated by practical reasons - dele-
tion method has to be simple and does not require any
additional storage.
We would like to construct such a covering S that
the adversary knowing already the concrete realiza-
tion y of the random variable Y gets no (or, in some
sense, very little) information about the underlying
concrete realization x of the random variable X. We
assume that the adversary knows our technique of
covering and the distribution of S we use and may
know the distribution of X. The formal definition of
secure covering is given below.
Definition 1. For ε ≥ 0 and δ ∈ [0,1] we say that S
(ε,δ)-covers data X if
P[(X,S) ∈ A
ε
] ≥ 1 − δ,
where
A
ε
=
n
(x,s) ∈ X × S :
1
1 + ε
≤
P[X = x|Y = x + s]
P[X = x]
≤ 1 + ε
o
,
and Y = X + S.
Universal Encoding for Provably Irreversible Data Erasing
141

The idea behind this definition is as follows - with
probability at least 1 − δ the adversary can observe
a value y that changes a priori distribution of hidden
x by at most multiplicative factor 1 + ε. In the con-
text of our problem there is some unknown value x
of layers in the device. The adversary does not know
it, however he knows that x layers can be there with
some probability p
x
. After some obfuscating process
(adding s layers) the adversary is given y = x + s. Af-
ter gaining some extra knowledge from y the proba-
bility that there were x layers deviates from p
x
by no
more than a multiplicative factor 1+ε. Of course, the
smaller the values of ε and δ, the stronger the covering
S of X is. In our paper we concentrate on algorithms
providing perfect security, i.e., ε = 0.
Note that this definition is an adaptation of
(ε,δ)-differential privacy introduced by Dwork et al.
in (Dwork et al., 2006b). The original definition has
been presented for the problem of preserving privacy
of individuals when some statistical information from
a database is revealed. This definition is de facto a
standard, formal and very natural method of measur-
ing revealing information. It has been used in vari-
ous papers from different fields related to information
protection (see e.g. (Shi et al., 2011; Golebiewski
et al., 2009)). This kind of security definitions is
widely accepted since the security guarantees do not
depend on any additional knowledge and are immune
against so-called linkage attacks in contrast to many
other methods of defining how well information is
hidden (see (Dwork, 2006; Cynthia Dwork and Aaron
Roth, 2013)). Moreover the Dwork et al’s idea seems
to be very intuitive and can be easily formalized. The
fact remains, however, that analyzing it can be diffi-
cult due to complex calculations. Note that differen-
tial privacy notion leads to required properties - i.e.
security is independent of adversary’s computational
power and is immune against any post-processing.
Such properties are inherited by our definition ((Cyn-
thia Dwork and Aaron Roth, 2013)). Finally, let us
remark that the definition used in our paper needs a
little bit subtle treatment since we do not compare a
few “neighbouring” states (i.e., database with or with-
out single individual as in the case of original Dwork
at al’s paper) but all possible states of memory to be
concealed.
We start with formulating theorems for d = 1, i.e.,
for one-dimensional (single bit) data and covering de-
noting them simply by X and S, respectively. We will
generalize theorems to arbitrary d later on.
Theorem 1. If X has a distribution other than con-
centrated in a single point, then S which (0,0)-covers
X does not exist.
Proof. Let us denote the ranges of X and S by X and
S , respectively (X and S are subsets of N, the set
of natural numbers). Assume by contradiction that
S (0, 0)-covers X. Then P[(X ,S) ∈ A
0
] = 1, where
A
0
= {(x,s) ∈ X ×S : P[X = x|Y = x +s] = P[X = x]}
(recall that Y = X + S).
Let x = min{i ∈ X : P[X = i] > 0} and s = min{i ∈
S : P[S = i] > 0}. Note that then P[X = x|Y = x +s] =
1 and P[X = x] < 1 (since X does not have a single-
point distribution). Thus (x, s) /∈ A
0
and, by indepen-
dence of X and S, we get
P[X = x,S = s] = P[X = x]P[S = s] > 0. Therefore
P[(X, S) ∈ A
0
] < 1.
Remark 1. Note that when X has a single-point dis-
tribution, i.e., P[X = x] = 1 for some x, then arbitrary
S (0,0)-covers X, since
P[X = x|Y = x + s]
P[X = x]
=
P[X = x,Y = x + s]
P[Y = x + s] · 1
=
=
P[X = x,S = s]
P[S = s]
=
P[X = x]P[S = s]
P[S = s]
= 1.
(Recall that Y = X + S.) Of course, when X has a
single-point distribution, known by adversary, noth-
ing can be done to hide the fact that x was stored on
the disc.
Theorem 2. Let δ ∈ (0, 1) and let P[X ∈ [K]] ≥ 1 −
δ/2. Let also S be uniformly distributed on [N], where
N ≥
K+2−δ/2
δ/2
. Then S (0, δ)-covers X.
Proof. We need to prove that P[(X,S) ∈ A
0
] ≥ 1 − δ,
where
A
0
= {(x, s) ∈ X ×S : P[X = x|Y = x+s] = P[X = x]}.
Obviously,
P[(X, S) ∈ A
0
] = P[(X,S) ∈ A
0
|X ∈ [K]]P[X ∈ [K]]
+ P[(X,S) ∈ A
0
|X /∈ [K]]P[X /∈ [K]]
≥ P[(X,S) ∈ A
0
|X ∈ [K]](1 − δ/2).
Note that if we prove that P[(X, S) ∈ A
0
|X ∈ [K]] ≥
1 − δ/2 we are done, since (1 − δ/2)
2
≥ 1 − δ. From
now on all the calculations are done by the assump-
tion X ∈ [K].
Note that, by independence of X and S, we get
P[X = x|Y = x + s] =
P[X = x,Y = x + s]
P[Y = x + s]
=
P[X = x,S = s]
P[Y = x + s]
=
P[X = x]P[S = s]
P[Y = x + s]
,
thus the condition P[X = x|Y = x + s] = P[X = x] is
equivalent to P[Y = x + s] = P[S = s]. Since S ∼
U{0, 1,. .. ,N} we get
A
0
=
(x,s) ∈ X × S : P[Y = x + s] =
1
N + 1
.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
142

By total probability law P[Y = x + s] =
∑
N
i=0
P[X =
x +s − i]P[S = i] thus for (x, s) ∈ X × S such that K ≤
x + s ≤ N we have
P[Y = x + s] =
x+s
∑
i=x+s−K
P[X = x + s − i]P[S = i] =
=
1
N + 1
K
∑
i=0
P[X = i] =
1
N + 1
.
For (x,s) ∈ X × S such that x + s < K we have
P[Y = x + s] =
x+s
∑
i=0
P[X = x + s − i]P[S = i] =
=
1
N + 1
x+s
∑
i=0
P[X = i] ≤
1
N + 1
,
and the above inequality is strict if only there exists
j > x + s such that P[X = j] > 0. Analogously, for
(x,s) ∈ X × S such that x + s > N, we have
P[Y = x + s] =
N
∑
i=x+s−K
P[X = x + s − i]P[S = i] =
1
N + 1
K
∑
i=x+s−N
P[X = i] ≤
1
N + 1
,
and again the above inequality is strict if only there
exists j < x+s −N such that P[X = j] > 0. Therefore
{(x,s) ∈ X × S : K ≤ x + s ≤ N} ⊆ A
0
. Thus if we
show that P[K ≤ Y ≤ N] ≥ 1 − δ/2 or, equivalently,
P[Y < K] + P[Y > N] ≤ δ/2,
we are done. Let us calculate P[Y ≤ K]. By equalities
from (1) we obtain
P[Y ≤ K] =
K
∑
y=0
P[Y = y] =
=
K
∑
y=0
1
N +1
y
∑
x=0
P[X = x] =
=
1
N +1
K
∑
x=0
(K + 1 − x)P[X = x]
=
1
N +1
(K + 1)
K
∑
x=0
P[X = x] −
K
∑
x=0
xP[X = x]
!
=
K + 1 − EX
N +1
.
On the other hand, by equalities from (1) we get
P[Y ≥ N] =
N+K
∑
y=N
P[Y = y] =
N+K
∑
y=N
1
N +1
K
∑
x=y−N
P[X = x] =
=
1
N +1
K
∑
x=0
(x + 1)P[X = x] =
=
1
N +1
K
∑
x=0
xP[X = x] +
K
∑
x=0
P[X = x]
!
=
EX +1
N +1
.
Finally, since N ≥
K+2−δ/2
δ/2
, we obtain
P[Y < K] + P[Y > N] ≤ P[Y ≤ K] + P[Y ≥ N] =
=
K + 2
N + 1
≤ δ/2.
(1)
The following theorem generalizes the above one
to arbitrary dimension d with the assumption that the
coordinates X
i
of data X = (X
1
,X
2
,.. ., X
d
) are inde-
pendent.
Theorem 3. Let δ ∈ (0, 1). Let X = (X
1
,X
2
,.. ., X
d
),
where X
i
’s are independent and let P[X
1
,.. ., X
d
∈
[K]] ≥ 1 − δ/2. Let S = (S
1
,S
2
,.. ., S
d
) with S
i
’s
being independent and uniformly distributed on [N],
wherein N ≥
2K+3+(1−δ/2)
1/d
1−(1−δ/2)
1/d
. Assume that X and S
are independent. Then S (0,δ)-covers data X.
Proof. Recall that Y = X + S = (X
1
+ S
1
,.. ., X
d
+
S
d
). We need to prove that P[(X,S) ∈ A
0
] ≥ 1 − δ,
where
A
0
= {(x,s) ∈ X ×S : P[X = x|Y = x+s] = P[X = x]}.
Let C denote the event that X
1
,.. ., X
d
∈ [K]. We have
P[(X,S) ∈ A
0
] ≥
P[(X,S) ∈ A
0
|C]P[C] ≥ P[(X,S) ∈ A
0
|C](1 − δ/2).
Note that if we show that P[(X,S) ∈ A
0
|C] ≥ 1 − δ/2
we are done, since (1 − δ/2)
2
≥ 1 − δ. From now on
all the calculations are done assuming that C holds.
The condition P[X = x|Y = x + s] = P[X = x] is
equivalent to P[Y = x + s] = P[S = s] (compare (1)).
Since S
i
∼ U{0,1, .. .,N}, i = 1, 2,. .. ,d, and S
i
’s are
independent, we get
A
0
=
(x,s) ∈ X × S : P[Y = x + s] =
1
(N + 1)
d
.
Note that by independence of X
i
’s and S
i
’s, Y
i
’s are
also independent. Recall that for x
i
,s
i
such that K ≤
x
i
+ s
i
≤ N we have
P[Y
i
= x
i
+ s
i
] =
1
N + 1
while for x
i
,s
i
such that x
i
+ s
i
< K or x
i
+ s
i
> N we
have
P[Y
i
= x
i
+ s
i
] ≤
1
N + 1
(compare proof of Theorem 2). Therefore P[Y =
x + s] =
1
(N+1)
d
if K ≤ x
i
+ s
i
≤ N for all i = 1,. .. ,d.
Note that what we actually need is that S
i
(0,1 − (1 −
δ/2)
1/d
)-covers X
i
for each i, since then, by indepen-
dence of Y
i
’s
P[(X,S) ∈ A
0
|C] ≥ (1−(1 − (1 − δ/2)
1/d
))
d
= 1−δ/2.
Universal Encoding for Provably Irreversible Data Erasing
143

By Theorem 2 we get that S
i
(0,1 − (1 − δ/2)
1/d
)-
covers X
i
for N ≥
2K+3+(1−δ/2)
1/d
1−(1−δ/2)
1/d
.
Subsequently, we will formulate analogous the-
orem, this time without the assumption on indepen-
dence of X
i
’s. Let us start with proving one lemma
that will be helpful later on.
Lemma 1. Let S = (S
1
,S
2
), where S
1
and S
2
are inde-
pendent random variables, uniformly distributed on
[N]. Let X = (X
1
,X
2
), where X
1
and X
2
are not neces-
sarily independent random variables with range [K],
K < N. Assume that X and S are independent. Let
Y = (Y
1
,Y
2
) = (X
1
+ S
1
,X
2
+ S
2
). Then
P[Y
1
≤ K,Y
2
≤ K]+ P[Y
1
≤ K,Y
2
≥ N]+
+ P[Y
1
≥ N,Y
2
≤ K]+ P[Y
1
≥ N,Y
2
≥ N] =
K + 2
N +1
2
.
Proof.
P[Y
1
≤ K,Y
2
≤ K] =
K
∑
y
1
=0
K
∑
y
2
=0
P[Y
1
= y
1
,Y
2
= y
2
]
=
K
∑
y
1
=0
K
∑
y
2
=0
y
1
∑
x
1
=0
y
2
∑
x
2
=0
P[X = (x
1
,x
2
),S = (y
1
− x
1
,y
2
− x
2
)]
=
1
(N +1)
2
K
∑
y
1
=0
K
∑
y
2
=0
y
1
∑
x
1
=0
y
2
∑
x
2
=0
P[X
1
= x
1
,X
2
= x
2
]
=
1
(N +1)
2
K
∑
y
1
=0
y
1
∑
x
1
=0
K
∑
x
2
=0
(K + 1 − x
2
)P[X
1
= x
1
,X
2
= x
2
]
=
1
(N +1)
2
K
∑
y
1
=0
y
1
∑
x
1
=0
P[X
1
= x
1
](K + 1 − E[X
2
|X
1
= x
1
])
=
1
(N +1)
2
×
×
K
∑
x
1
=0
(K + 1 − x
1
)P[X
1
= x
1
](K + 1 − E[X
2
|X
1
= x
1
]) =
=
1
(N +1)
2
K
∑
x
1
=0
(K + 1)P[X
1
= x
1
](K + 1 − E[X
2
|X
1
= x
1
])
−
1
(N +1)
2
K
∑
x
1
=0
x
1
P[X
1
= x
1
](K + 1 − E[X
2
|X
1
= x
1
])
=
(K + 1)
2
− (K + 1)(EX
1
+ EX
2
) + E[X
1
X
2
]
(N +1)
2
.
(2)
By analogous calculations we obtain
P[Y
1
≥ N,Y
2
≥ N] =
E[X
1
X
2
] + EX
1
+ EX
2
+ 1
(N +1)
2
, (3)
P[Y
1
≥ N,Y
2
≤ K] =
(K + 1)EX
1
− EX
2
− E[X
1
X
2
] + K + 1
(N +1)
2
,
(4)
and
P[Y
1
≤ K,Y
2
≥ N] =
(K + 1)EX
2
− EX
1
− E[X
1
X
2
] + K + 1
(N +1)
2
.
(5)
Summing up (2), (3), (4), and (5) concludes the proof.
The formulation of the next theorem is analogous
to Theorem 3, however this time we do not assume
that the coordinates X
i
’s of data X = (X
1
,X
2
,.. ., X
d
)
are independent.
Theorem 4. Let δ ∈ (0, 1). Let X = (X
1
,X
2
,.. ., X
d
)
and let P[X
1
,.. ., X
d
∈ [K]] ≥ 1 − δ/2. Let S =
(S
1
,S
2
,.. ., S
d
) with S
i
’s being independent and uni-
formly distributed on [N], wherein N ≥
d(K+2)−δ/2
δ/2
.
Assume that X and S are independent. Then S (0,δ)-
covers data X.
Remark 2. The proof contains many references to
calculations from the proof of Theorem 2.
Proof. Recall that Y = X + S = (X
1
+ S
1
,X
2
+
S
2
,.. ., X
d
+ S
d
) and X and S denote the ranges of X
and S, respectively. We need to prove that P[(X,S) ∈
A
0
] ≥ 1 − δ, where
A
0
= {(x,s) ∈ X ×S : P[X = x|Y = x+s] = P[X = x]}.
The condition P[X = x|Y = x + s] = P[X = x] is
equivalent to P[Y = x + s] = P[S = s] =
1
(N+1)
d
(com-
pare (1)).
Let B = {(x,s) ∈ X × S : K ≤ x
i
+ s
i
≤ N,i =
1,.. ., d}. For (x,s) ∈ B we have (compare 1)
P[Y = x + s] =
=
x
1
+s
1
∑
i
1
=x
1
+s
1
−K
...
x
d
+s
d
∑
i
d
=x
d
+s
d
−K
P[X = (x
1
+ s
1
− i
1
,...,x
d
+ s
d
− i
d
)]P[S = (i
1
,...,i
d
)]
=
1
(N +1)
d
K
∑
x
1
=0
...
K
∑
x
d
=0
P[X = (x
1
,...,x
d
)] =
1
(N +1)
d
.
Note that for (x,s) /∈ B we always obtain
P[Y = x + s] ≤
1
(N + 1)
d
(compare the calculations for d = 1 from the proof of
Theorem 3). Thus B ⊆ A
0
and it is enough to show
that P[(X,S) ∈ B] ≥ 1 − δ. Let C denote the event
that X
1
,.. ., X
d
∈ [K]. We have
P[(X,S) ∈ B ] ≥ P[(X,S) ∈ B |C]P[C] ≥
≥ P[(X,S) ∈ B |C](1 − δ/2).
Note that if we show that P[(X,S) ∈ B|C] ≥ 1 − δ/2,
or, equivalently, P[(X,S) /∈ B |C] ≤ δ/2, we are done,
since (1 − δ/2)
2
≥ 1 − δ. From now on all the calcu-
lations are done assuming that C holds.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
144

We have
P[(X,S) /∈ B|C] =
= P[Y
1
< K ∪Y
1
> N ∪ ... ∪Y
d
< K ∪Y
d
> N]
≤ P[Y
1
≤ K ∪Y
1
≥ N ∪ ... ∪Y
d
≤ K ∪Y
d
≥ N]
=
d
∑
i=1
(P[Y
i
≤ K] + P[Y
i
≥ N])
−
∑
1≤i< j≤d
(P[Y
i
≤ K,Y
j
≤ K] + P[Y
i
≤ K,Y
j
≥ N])
−
∑
1≤i< j≤d
(P[Y
i
≥ N,Y
j
≤ K] + P[Y
i
≥ N,Y
j
≥ N])
+ . . .+
(−1)
d+1
(P[Y
1
≤ K,...,Y
d
≤ K] + P[Y
1
≥ N, ...,Y
d
≥ N]).
(6)
Let
U = P[Y
1
< K ∪Y
1
> N ∪ . .. ∪Y
d
< K ∪Y
d
> N]
and
L =
∑
1≤i< j≤d
(P[Y
i
≤ K,Y
j
≤ K] + P[Y
i
≤ K,Y
j
≥ N]+
+ P[Y
i
≥ N,Y
j
≤ K] + P[Y
i
≥ N,Y
j
≥ N]).
Note that (6) is just a special case of inclusion-
exclusion principle, thus
U −L ≤ P[(X, S) /∈ B |C] ≤ U.
By the equality in 1 we have
U = d(P[Y
1
≤ K] + P[Y
1
≥ N]) =
d(K + 2)
N + 1
and by Lemma 1
L =
d
2
(P[Y
1
≤ K,Y
2
≤ K] + P[Y
1
≤ K,Y
2
≥ N]
+ P[Y
1
≥ N,Y
2
≤ K] + P[Y
1
≥ N,Y
2
≥ N])
=
d
2
K + 2
N + 1
2
.
Therefore
d(K + 2)
N + 1
−
d
2
K + 2
N + 1
2
≤ P[(X,S) /∈ B|C]
≤
d(K + 2)
N + 1
.
Since N ≥
d(K+2)−δ/2
δ/2
, the conclusion follows from
the righthandside of the above inequality.
Note that if only dK N, the above estimation is
tight up to the order of Θ(dK/N).
Remark 3. Of course, the lower bound on N guaran-
teeing that S (0,δ)-covers X is bigger when we deal
with general data X = (X
1
,X
2
,.. ., X
d
), i.e., when X
i
’s
may be dependent. In Theorem 3 we need
N ≥
2K + 3 + (1 − δ/2)
1/d
1 − (1 − δ/2)
1/d
∼
2K
1 − (1 − δ/2)
1/d
when X
i
’s are independent, while in Theorem 4
N ≥
d(K + 2) − δ/2
δ/2
∼
2dK
δ
when X
i
’s may be dependent. Note, however, that the
price we pay in general case (Theorem 4) is not very
significant when δ is small. For small δ we may actu-
ally estimate
1
1−(1−δ/2)
1/d
∼
1
1−e
−δ/2d
∼
2d
δ
.
3.1 Universal Random Variables and
Uniform Obfuscation
In this paper we discussed perfect obfuscation, i.e.,
such that with probability at least 1 − δ the observer
having access to observable Y, learns no new infor-
mation about the real data X. The solutions we pro-
posed are universal with respect to K, i.e., they guar-
antee (with some strictly controlled probability) ob-
fuscation of any X concentrated on [K] (except cases
of total probability at most δ). Note that all our meth-
ods use for obfuscation a random variable with uni-
form distribution on a fixed set.
One may ask two questions. First, do we really
need a universal obfuscation? Clearly, one can con-
struct more efficient methods of obfuscation tailored
for a given X. We claim that demanding universal
method is fully justified by practical needs. Regular
users of data storage devices do not know the distribu-
tion of their stored data (possibly except a case, while
the disc is used for storing cryptographic materials as
in (Klonowski et al., 2008)). Moreover, the adversary
having access to the big volume of statistical data can
have some knowledge of the distribution to be obfus-
cated and have another advantage over a regular user.
Second, even if we accept that the universal obfus-
cation is really needed, one may be tempted to con-
struct substantially different (and possibly more effi-
cient) methods that deviate from using uniform dis-
tribution. Below we show that any universal method
offering perfect security (i.e., ε = 0) has to use for
obfuscating a distribution “close” to uniform. More
precisely, if we demand that S (0, δ)-covers any X,
then the set of values of S having the same probabil-
ity needs to be of measure at least 1 − (δ/(1 − γ)) for
arbitrarily small γ ∈ (0,1).
In this section, let p
s
denote P[S = s] for s ∈ N
and 0 otherwise. In the theorem below we consider
one-dimensional X and S.
Theorem 5. Let S be a random variable distributed
on N. If there exists S
∗
⊂ N such that P[S ∈ S
∗
] >
δ/(1 − γ) for arbitrarily small γ ∈ (0,1) and for every
Universal Encoding for Provably Irreversible Data Erasing
145

different s,s
0
∈ S
∗
holds p
s
6= p
s
0
, then S cannot (0,δ)-
cover arbitrarily distributed data X .
Proof. Aiming for a contradiction let us assume that S
(0,δ)-covers any data X and that there exists S
∗
⊆ N
such that p
s
6= p
s
0
for any different s,s
0
from S
∗
and
P[S ∈ S
∗
] > δ/(1 − γ) for arbitrarily small γ ∈ (0, 1).
To every s ∈ S
∗
let us assign s
∗∗
= min{i ∈ N|p
i
=
p
s
}. Let S
∗∗
= {s
∗∗
|s ∈ S
∗
∧ p
s
> 0}. That is, S
∗∗
is
the set of elements that appear with a given, positive,
probability for the first time in the sequence of natural
numbers. Clearly, P[S ∈ S
∗∗
] = P[S ∈ S
∗
] > δ/(1 − γ)
and for any different s, s
0
from S
∗∗
p
s
6= p
s
0
holds.
Now let us look at data X such that P[X = 0] =
1 − γ and P[X = 1] = γ. Consider the set of pairs
(0,s) ∈ {0, 1} × S
∗∗
. For those pairs, by the construc-
tion of S
∗∗
, we obtain
P[Y = x + s] = P[Y = s] = P[X = 0] · p
s
+ P[X = 1] · p
s−1
= (1 − γ) · p
s
+ γ · p
s−1
6= p
s
= P[S = s].
(7)
Recall that (x, s) ∈ A
0
if and only if P[Y = x + s] =
P[S = s]. Definitely, by Equation 7, if s ∈ S
∗∗
then
(0,s) /∈ A
0
. By independence of X and S we get
P[(X,S) ∈ {0} × S
∗∗
] = P[X = 0] · P[S ∈ S
∗∗
]
>
(1 − γ)δ
(1 − γ)
= δ.
Thus P[(X, S) ∈ A
0
] < 1 − δ, which contradicts the
statement that S (0,δ)-covers any data X.
Note that the construction from the proof uses X con-
centrated on the set {0,1}. Thus the proof is valid for
any K ≥ 2.
4 FAST METHOD FOR DATA
OBFUSCATION
The methods presented in previous part of the paper
offer a perfect security with fully controllable proba-
bility. However, they all have a drawback that pre-
vents them from using in some real-life scenarios.
Namely, note that in Deletion Phase the user has to
perform a large number of writing operations. Trans-
lating it into real-life terms the whole disc has to
be overwritten during Deletion Phase the number of
times that is greater than the number of times the disc
can be used in the Regular User Phase. Even using
ultra fast devices the time one needs for all the op-
erations can be prohibitively large in natural applica-
tion wherein a user has to remove the content possibly
quickly.
In this section we present a method that drasti-
cally reduces the number of operations during Dele-
tion Phase for the price of a very long Preliminary
Phase, while the perfect security property of deletion
is still preserved. This means, however, that a storage
device has to be prepared for a long time before it is
used for storing some data. The Deletion Phase needs
only linear (with respect to the size of the data to be
deleted) number of operations. Note that this number
of operations is asymptotically optimal - indeed, one
needs Ω(d) operations to somehow delete data writ-
ten on the last layer.
4.1 Algorithm Description
The protocol uses one parameter - K - the upper bound
on the number of times each bit can be changed during
Regular User Phase.
Preliminary Phase - i-th box is flipped
ˆ
S
i
times,
where
ˆ
S
i
’s are independent random variables uni-
formly distributed on {0, 2,.. ., N −3,N −1} (N is
an odd number depending on K, setting its value
will be discussed in the next section).
Regular Usage Phase - the user can flip each bit up
to K times, we denote those changes by random
variable X = (X
1
,X
2
,.. ., X
d
) (we mean that i-th
box was flipped X
i
times).
Deletion Phase - the state of each box is changed in-
dependently with probability 1/2, which will be
denoted by C = (C
1
,C
2
,.. .,C
d
), where C
i
’s are
independent random variables such that P[C
i
=
0] = P[C
i
= 1] = 1/2 (of course, C
i
refers to pos-
sible single change made in the i-th box).
4.2 Analysis
First let us note that the Deletion Phase is optimal - it
makes only O(d) changes (since each box is changed
at most once). Moreover, we believe that the dele-
tion operation can be performed quickly in real-life
settings.
Now we discuss security of this approach. Let
us analyze the i-th box. The adversary knows our
technique of obfuscation and is given the state of the
disc after the Deletion Phase. Thus what she sees
is
ˆ
S
i
+ X
i
+ C
i
, where
ˆ
S
i
, X
i
, and C
i
are indepen-
dent. Note that since
ˆ
S
i
is uniformly distributed on
{0,2,. .. ,N − 3,N − 1} (the set of even numbers not
greater than N − 1) and C
i
is a Bernoulli trial with
probability 1/2, we get that
ˆ
S
i
+C
i
(let us denote this
sum by S
i
) is uniformly distributed on [N]. Thus what
adversary knows is that the number of layers she sees
is the sum of independent random variables: S
i
(which
SECRYPT 2019 - 16th International Conference on Security and Cryptography
146

is uniformly distributed on [N]) and X
i
(data with dis-
tribution that may be known to the adversary). Thus
what we get is the situation exactly analogous to the
one from the previous section. Therefore, in order to
choose the value of N guaranteeing the desired level
of security, one may apply Theorem 4.
Finally let us justify some details of the presented
construction that seems to be artificial at first glance.
Let us note that the number of flips in the Preliminary
Phase,
ˆ
S
i
, is chosen from even numbers to have al-
ways 0-box on the last layer after Preliminary Phase.
Thanks to this trick X
i
is independent of
ˆ
S
i
. However
ˆ
S
i
+ X
i
still reveals the parity of X
i
. In particular the
adversary can inspect the last layer by just checking
the state of the boxes. For that reason we need to add
C
i
in Deletion Phase to complete obfuscation of X
i
.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we have presented and analyzed meth-
ods for provable deletion of stored data. We believe
that this is a good starting point to broader analysis
of provably secure deletion problems. All presented
methods offer perfect security (i.e., we set ε = 0).
Note that this is a very strong requirement. One
can expect that relaxing this assumption will lead to
obtaining more efficient algorithms. Note also that
throughout the whole paper we were considering con-
cealing data from arbitrary distribution, whereas we
hope to construct more practical solutions for special
types of data. This issue, as well as the case when the
security parameter ε is greater than 0, are left for a
future work.
ACKNOWLEDGEMENTS
This paper is supported by Polish National Science
Center. Preliminary ideas has been supported by
the grant UMO-2013/09/B/ST6/02251. Full version
with the formal analysis was prepared thanks to grant
UMO-2018/29/B/ST6/02969 .
REFERENCES
Gutmann P. (1996). Epilogue to: Secure deletion of data
from magnetic and solid-state.
Ali M., Dhamotharan R., Khan E., Khan S.U., Vasilakos
A.V., Li K., and Zomaya A.Y. (2017). Sedasc: Se-
cure data sharing in clouds. IEEE Systems Journal,
11(2):395–404.
Bacis E., De Capitani di Vimercati S., Foresti S., Paraboschi
S., Rosa M., and Samarati P. (2016). Mix & slice:
Efficient access revocation in the cloud. ACM Con-
ference on Computer and Communications Security,
pages 217–228.
Cynthia Dwork and Aaron Roth (2013). The algorithmic
foundations of differential privacy. Foundations and
Trends in Theoretical Computer Science, 9(3-4):211–
407.
Dwork, C. (2006). Differential privacy. ICALP.
Dwork, C., McSherry, F., Nissim, K., and Smith, A.
(2006a). Calibrating noise to sensitivity in private data
analysis. In (Halevi and Rabin, 2006), pages 265–284.
Dwork, C., McSherry, F., Nissim, K., and Smith, A.
(2006b). Calibrating noise to sensitivity in private data
analysis. In (Halevi and Rabin, 2006), pages 265–284.
Goldreich, O. and Ostrovsky, R. (1996). Software pro-
tection and simulation on oblivious rams. J. ACM,
43(3):431–473.
Golebiewski, Z., Klonowski, M., Koza, M., and Kuty-
lowski, M. (2009). Towards fair leader election in
wireless networks. In Ruiz, P. M. and Garcia-Luna-
Aceves, J. J., editors, Ad-Hoc, Mobile and Wireless
Networks, 8th International Conference, ADHOC-
NOW 2009, Murcia, Spain, September 22-25, 2009,
Proceedings, volume 5793 of Lecture Notes in Com-
puter Science, pages 166–179. Springer.
Gomez R. D., Burke E. R., Adly A. A., Mayergoyz I. D.,
Gorczyca J. A., and Kryder M. H. (1993). Micro-
scopic investigations of overwritten data. Journal of
Applied Physics, 73:6001–6003.
Gutmann Peter (1996). Secure deletion of data from mag-
netic and solid-state memory. In In Proceedings of the
6th USENIX Security Symposium, pages 77–89.
Halevi, S. and Rabin, T., editors (2006). Theory of Cryp-
tography, Third Theory of Cryptography Conference,
TCC 2006, New York, NY, USA, March 4-7, 2006, Pro-
ceedings, volume 3876 of Lecture Notes in Computer
Science. Springer.
Hao F., Clarke D., and Zorzo A.F. (2016). Deleting secret
data with public verifiability. IEEE Trans. Dependable
Sec. Comput., 13(6):617–629.
Hughes G., Coughlin T., and Commins D. (2009). Disposal
of disk and tape data by secure sanitization.
Hur J., Koo D., Shin Y., and Kang K. (2017). Secure data
deduplication with dynamic ownership management
in cloud storage. IEEE International Conference on
Data Engineering, pages 69–70.
Jia, S., Xia, L., Chen, B., and Liu, P. (2016). NFPS: adding
undetectable secure deletion to flash translation layer.
In Proceedings of the 11th ACM on Asia Conference
on Computer and Communications Security, AsiaCCS
2016, Xi’an, China, May 30 - June 3, 2016, pages
305–315.
Klonowski, M., Przykucki, M., and Struminski, T. (2008).
Data deletion with provable security. In Interna-
tional Workshop on Information Security Applica-
tions, WISA ’08, pages 240–255.
Klonowski, M., Przykucki, M., and Struminski, T. (2009).
Data deletion with time-aware adversary model. In
Universal Encoding for Provably Irreversible Data Erasing
147

Proceedings IEEE CSE’09, 12th IEEE International
Conference on Computational Science and Engineer-
ing, August 29-31, 2009, Vancouver, BC, Canada,
pages 659–664. IEEE Computer Society.
Mayergoyz I. D., Tse C., Krafft C., and Gomez R. D.
(2001). Spin-stand imaging of overwritten data and
its comparison with magnetic force microscopy. Jour-
nal of Applied Physics, 89:6772–6774.
Moran T., Naor M., and Segev G. (2009). Deterministic
history-independent strategies for storing information
on write-once memories. Theory of Computing, 5:43–
67.
Moritz C.A., Chheda S., and Carver K. (2015). Secur-
ing microprocessors against information leakage and
physical tampering. Patent US 9940445 B2.
Rivest, R. L. and Shamir, A. (1982). How to reuse a write–
once memory. In Proceedings of the fourteenth annual
ACM symposium on Theory of computing, STOC ’82,
pages 105–113.
Roche, D. S., Aviv, A. J., and Choi, S. G. (2016). A prac-
tical oblivious map data structure with secure deletion
and history independence. In IEEE Symposium on Se-
curity and Privacy, SP 2016, San Jose, CA, USA, May
22-26, 2016, pages 178–197.
Rugar D., Mamin H. J., Guethner P., Lambert S. E., Stern
J. E., McFadyen I., and Yogi T. (1990). Magnetic
force microscopy: General principles and application
to longitudinal recording media. Journal of Applied
Physics, 68(3):1169–1183.
Shi, E., Chan, T.-H. H., Rieffel, E., Chow, R., and Song, D.
(2011). Privacy-preserving aggregation of time-series
data. NDSS.
US Department of Defense (1997). National industrial se-
curity program operating manual NISPOM January
1995. Technical Report DoD 5220.22-M.
U.S. National Institute of Standards and Technology (2006).
Nist special publication 800-88: Guidelines for media
sanitization.
Wegberg G., Ritzdorf H., and
ˇ
Capkun S. (2017). Multi-user
secure deletion on agnostic cloud storage.
Yang C., Chen X., and Xiang Y. (2018). Blockchain-based
publicly verifiable data deletion scheme for cloud stor-
age. Journal of Network and Computer Applications,
103:185–193.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
148
