
Towards Total Coverage in Autonomous Exploration for UGV in 2.5D
Dense Clutter Environment
Evgeni Denisov
1 a
, Artur Sagitov
1 b
, Konstantin Yakovlev
2 c
,
Kuo-Lan Su
3 d
, Mikhail Svinin
4 e
and Evgeni Magid
1 f
1
Department of Intelligent Robotics, Higher Institute for Information Technology and Intelligent Systems,
Kazan Federal University, 35 Kremlyovskaya street, Kazan, Russian Federation
2
Federal Research Center ”Computer Science and Control” of Russian Academy of Sciences, Moscow, Russian Federation
3
Department of Electrical Engineering, National Yunlin University of Science and Technology, Tainan City, Taiwan
4
Robot Dynamics and Control Laboratory, College of Information Science and Engineering, Ritsumeikan University,
Noji Higashi 1-1-1, Kusatsu 525-8577, Japan
Keywords:
Mobile Robot, Path Planning, Autonomous Exploration and Coverage Algorithm, Next-best-view, Dense
Clutter Environment, Environment Reconstruction.
Abstract:
Recent developments in 3D reconstruction systems enable to capture an environment in great detail. Several
studies have provided algorithms that deal with a path-planning problem of total coverage of observable space
in time-efficient manner. However, not much work was done in the area of globally optimal solutions in dense
clutter environments. This paper presents a novel solution for autonomous exploration of a cluttered 2.5D
environment using an unmanned ground mobile vehicle, where robot locomotion is limited to a 2D plane,
while obstacles have a 3D shape. Our exploration algorithm increases coverage of 3D environment mapping
comparatively to other currently available algorithms. The algorithm was implemented and tested in randomly
generated dense clutter environments in MATLAB.
1 INTRODUCTION
In recent years, 3D reconstruction systems have
evolved towards highly-detailed and accurate recon-
structions of 3D environment, which is now possible
even with monocular cameras (Engel et al., 2014).
Developments in parallel GPU-based computing en-
abled online processing of incoming sensory data,
which allows moving away from offline data process-
ing. Applications of 3D reconstruction systems in-
clude autonomous navigation in mobile robotics, 3D
scanning and augmented reality applications. 3D re-
construction requires to face various challenges such
as dealing with dynamic environments, small range
sensing, featureless monotone and reflective surfaces,
a
https://orcid.org/0000-0003-0868-0197
b
https://orcid.org/0000-0001-8399-460X
c
https://orcid.org/0000-0002-4377-321X
d
https://orcid.org/0000-0003-2807-2121
e
https://orcid.org/0000-0003-2459-2250
f
https://orcid.org/0000-0001-7316-5664
dynamic lighting conditions etc.
Although many of the above mentioned problems
still do not have robust solutions, researchers attempt
to go one step ahead and develop algorithms for 3D
exploration and coverage planning under assumption
that existing SLAM systems are robust and close to
its final development. Notable results in these scien-
tific areas can lead to such advantages as fully au-
tonomous 3D scanning and intelligent reasoning in
3D space. Similarly to 2D exploration path planning
(Gonz
´
alez-Banos and Latombe, 2002), major issue in
3D exploration is development of a globally optimal
planning algorithm (Lavrenov et al., 2017) that pro-
vides total coverage of visible environment in free
configuration space without a-priori knowledge of en-
vironment (even for static environments). We further
discuss those issues in Section 2.
In this paper, we present a novel algorithm that
optimizes existing exploration and coverage strategies
for a simple 3-DoF UGVs in 2.5D dense clutter envi-
ronments. To evaluate our results, we developed en-
vironment generation algorithm that creates random
Denisov, E., Sagitov, A., Yakovlev, K., Su, K., Svinin, M. and Magid, E.
Towards Total Coverage in Autonomous Exploration for UGV in 2.5D Dense Clutter Environment.
DOI: 10.5220/0007923304090416
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 409-416
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
409

dense clutter environments. Additionally, we intro-
duced a new type of voxels that we refer as ”hard
to observe” to formally define dense clutter environ-
ments and to provide a better tool for evaluation of
algorithms in this area.
The remainder of this paper is organized as fol-
lows. Section 2 overviews related work and highlights
limitations of existing solutions. Section 3 describes
problem definition, system setup and our proposed so-
lution approach. Section 4 presents simulation setup
while Section 5 analyzes and evaluates simulation re-
sults. Finally, we discuss our future work plans in
Section 6 and conclude the paper in Section 7.
2 RELATED WORK
The problem of 3D space exploration and coverage is
fairly recent in scientific research. Heng et al. were
among the first authors who introduced the idea of
combining 3D space exploration and coverage prob-
lems together (Heng et al., 2015). They pointed out
that majority of works (further discussed in (Heng
et al., 2015)) on exploration attempted to avoid 3D
space, while research works on coverage were based
on a-priori available entire map of environment and
next-best-view algorithms assumed only single ob-
jects of known sizes. They presented an information
gain-based heuristic solution for unmanned aerial ve-
hicles (UAVs), which relies on selection of closest
frontiers with high information gain, mostly known
as next-best-view gain (see Section 3.2.2). Next-best-
view gain remains a highly popular tool within solu-
tions for 3D space exploration and coverage problem.
In (Ad
´
an et al., 2015) a similar next-best-view so-
lution was presented for 3-DoF unmanned ground ve-
hicle (UGV) with omnidirectional sensor. Coverage
planning with a known map (Dornhege et al., 2013)
can be used incrementally, but requires additional
planning in order to obtain time efficiency. Most
widespread solution to 3D space exploration and cov-
erage problem was proposed by (Bircher et al., 2016)
with RRT* path planning algorithm (LaValle, 1998).
They improved RRT* algorithm (with regard to the
search results and adaptiveness to changes relatively
to other existing approaches) by stopping a current
best branch execution after one node. A newer ver-
sion of this paper introduced an ability to explore vis-
ible space in surfaces instead of voxel s(Bircher et al.,
2018). (Senarathne and Wang, 2016) introduced an
idea of searching edges of known surfaces instead of
unobserved frontiers, which performs well for orthog-
onal environment. (Mendez et al., 2017) proposed to
take into account paths that provide a gain in qual-
ity for modelling results inside voxels. They also
made a multi-robot implementation for cooperative
stereo-pair planning. (Dang et al., 2018) implemented
human-inspired visual attention model that plans ex-
ploration towards visually salient areas in RGB im-
age. (Meng et al., 2017) used genetics algorithms as
an extra step to refine robot movement between se-
lected frontier viewpoints.
Vast majority of research in this area concentrate
on algorithms for UAVs because of a limited tele-
operation control and low capacity batteries that de-
mand automation for UAV-based search and coverage
tasks. Even though design of these algorithms is usu-
ally platform-independent and may suit various sim-
ple robots (including 3-DoF UGVs), a few works, in-
cluding this paper, design solutions specially for 3-
DoF UGVs without targeting for generalized solu-
tions.
We highlighted two limitations of the above men-
tioned works that in our opinion are the most impor-
tant:
1. The algorithm evaluation was not performed in
a highly dense clutter unstructured environment. The
exception is (Zhang et al., 2017) where (unstructured)
3D structures of caves were used, but typical caves
lack a density of cluttered structures and the proposed
solution was not fully autonomous.
2. Low interest towards total capture of an envi-
ronment as a main target of exploration. For UAVs
this arises from expensiveness of viewpoint sampling
in 3D free configuration space. Moreover, most pa-
pers stated that dense viewpoint sampling in 2D free
configuration space, which might be necessary for to-
tal coverage, is too expensive for UGVs, and thus is
ignored.
To test against these limitations for a 3-DoF
UGV setup, we have created a random environment
generation algorithm with a novel heuristic planner
that outperforms current notable RRT*-based algo-
rithm (Bircher et al., 2016).
The motivation behind using a dense clutter en-
vironment is that it’s not clear how well existing
and newly introduced algorithms would perform in
complex environments. Majority of authors simply
test their algorithms inside a limited set of indoor
environments (including own laboratories or univer-
sity buildings). When they use simulated environ-
ment it’s mostly not significantly more complicated
than their real working environment. But there ex-
ist a variety of significantly more complicated types
of environments, which can be considered important
for application of autonomous 3D exploration algo-
rithms, especially for USAR (Urban search and res-
cue): caves, forests, mountains, construction sites,
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
410

partially or fully destroyed buildings, junkyards, etc.
Aside from that, making dense or even simply high
clutter environment for real experiments is challeng-
ing, especially if a researcher wants to add some ex-
otic objects that come out of environment walls or
hang down from a ceiling.
3 OVERVIEW
This section describes our approach in details. Af-
ter formal problem definition, an overview for both
path-planning and random environment generation al-
gorithms are presented.
3.1 Formal Problem Definition
Our problem definition is similar to other works in
this research field. The goal is to autonomously ex-
plore a bounded 3D space V ⊂ R
3
while minimiz-
ing total coverage time. We classify V as free, occu-
pied, non-observed or residual voxels. Areas that are
not observable from any configuration ξ by a given
robot and its sensor(s) are denoted as V
res
and the
goal of exploration is considered to be achieved when
V
f ree
∪ V
occ
= V −V
res
.
To define dense clutter environments we specify
”hard to observe” voxels or simply V
hto
. The environ-
ment is considered densely cluttered if it contains a
large amount of voxels that are observable only from
a very limited number of free configuration space lo-
cations. Figure 1 demonstrates is a simple example
of V
hto
concept. Green cells denote occupied voxels,
red cells are unobservable voxels, white cells are ob-
servation space, grey cells are non-observation space
and the yellow cells is the only voxel in the picture
that is observable from a limited, but not an empty set
of viewpoints.
Current state-of-the-art algorithms consider a path
that can observe more unobserved voxels as the best
one, which is not the case when we take total cover-
age as a main goal, because these leftovers from paths
without highest count of unobserved voxels will lead
to extra planning steps closer to the end of coverage
process with huge distance costs. The fault of these
approaches becomes more obvious if we consider this
problem as a variation of the traveling salesman prob-
lem. In our research goal we are looking for every
visible voxel (even if it could be observed only from
a single free space configuration) and therefore it is
important not to postpone small unobserved environ-
ment patches for a future exploration.
Aside from that, another possible application of
V
hto
concept comes from its ability to determine pro-
posed algorithms overall progress without perform-
ing total coverage exploration, because in both real
and simulated experiments process may require sig-
nificant (scale of hours and days) exploration time.
Therefore, for evaluation of algorithms in Section V
we simply count V
hto
based on a-priori knowledge
with a user-defined threshold and provide information
about how many of V
hto
were missed leftovers. Sec-
tion 5 evaluates both algorithms.
Figure 1: An example of V
hto
concept: occupied (green) and
unobservable voxels (red), observation space (white), non-
observation space (grey) and the only voxel that is observ-
able from a limited non-empty set of viewpoints (yellow).
3.2 Path-planning Algorithm Overview
To approach this problem we had to reformulate clas-
sic frontier solutions (for example, in (Gonz
´
alez-
Banos and Latombe, 2002)) as they do not suited
for coverage in complex 2.5D and 3D environments.
First, step towards a more brute force solution than
a heuristic one. Still our algorithm densely scans
only viewpoints inside a limited squared area around
a robot to avoid high computation costs. Every view-
point inside this area is checked for visibility of unex-
plored surface voxels (V
us
). A viewpoint with a mini-
mum distance to the robot is considered as a next path.
After reaching the best viewpoint the robot rotates to-
wards unexplored voxels. In order not to emphasize
space exploration priority over obstacle examination,
we ignore floor surface voxels like if there is no ob-
stacle between them and the robot.
After all contact space inside a scanning area is
fully explored or the robot can not reach a next cell
we switch to RRT* algorithm with NBV gain. A con-
tact cell is marked as fully explored when there is not
a single V
us
that is visible through this cell in a free
space within robot scanning area. Note that our al-
gorithm searches V
us
outside the scanning area since
this area contains only viewpoints and so all V
us
in
the scanning range from every viewpoint are consid-
ered. Algorithm 1 is visualized in Fig. 2. The robot
(3x3 cell size with yellow dot at the center as its depth
Towards Total Coverage in Autonomous Exploration for UGV in 2.5D Dense Clutter Environment
411

sensor) explores space behind contact space around
(highlighted as red square area). On the left image
white cells are fully explored contact space, blue cells
are partially explored contact space and light grey
cells are free space from which unexplored surface
voxels are visible.
To improve effectiveness of our approach we
added a step that produces a limiting line for convex
regions. Without this step our algorithm tends to leave
unexplored corners if searching area size is smaller
than robot vision range. Limiting line is considered
optimal if it is the shortest line that paths through the
robot location. A cooldown feature is added to lets
the robot moving few extra steps before producing a
next line (Fig. 3: limiting lines are shown in red, yel-
low line is the robot path, which is produced by our
planner; other colors are the same as in Fig. 2).
Algorithm 1: Overview of our planner concept.
Initialization;
while termination condition not met do
if area around robot contains not entirely
explored contact space then
find V
hto
and free space;
go to a free cell with highest gain;
produce a limiting line if possible;
else
plan exit strategy with RRT*;
end
end
Figure 2: Algorithm 1 concept (2D view from above): robot
(yellow) explores space behind contact space (red square
area).Left image: fully explored contact space (white cells),
partially explored contact space (blue cells) and free space
(light grey) from which unexplored surface voxels are visi-
ble.
Estimate of information gain for a viewpoint cell
that we get after evaluation is calculated using the fol-
lowing equation:
Gain
hto
= HTO ∗ e
−d
∗ LIMIT (1)
, where d is the distance cost, HTO is the sign of a
number of visible V
us
from a viewpoint and LIMIT is
zero if a cell is placed outside of convex region, which
Figure 3: Example of limiting lines (red) sampling. Yellow
line is the robot path.
is closed with a limiting line. Termination condition
for our algorithm is a state with no empty frontiers left
and all of contact space is being fully explored in 2D
top-view with some error. It is possible to continue
with RRT* planner if necessary.
Next subsections briefly explain the concepts of
RRT* and next-best-view gain that were used in our
planner’s step when there is no fully examined contact
space left near the robot.
3.2.1 Exit Strategies with RRT*
Rapidly-exploring random tree (RRT, (LaValle,
1998)) is a path-planning algorithm that expands a
random tree towards unexplored areas until it reaches
a goal. The algorithm samples a collection of con-
nected nodes in SE(3) space without intersections of
non-free space and between their connections. A
branch is considered the best for execution if it has a
highest next-best-view gain relatively to other nodes
of the branch
Gain
nbv
= NBV ∗ e
−λd
(2)
, where d is a distance cost, NBV is a gain from a node
by the count of visible empty voxels and λ is a param-
eter that regulates the gain from nodes in a far dis-
tance. After the robot movement execution, the max-
ima of the second best branch becomes a new goal for
a next random tree. RRT* algorithm improves con-
vergence (of the original algorithm) towards z goal
point. Some of the related work applied RRT* as a
core algorithm. Additionally, we limit a max amount
of tree nodes and stop expansion after reaching a cer-
tain number of nodes. A typical result of RRT* sam-
pling is visualized in Fig. 4.
In our algorithm there are two exit strategies that
involve RRT* path-planning algorithm with NBV
gain. The first is for exploring empty environment
without visible obstacles in range of a depth sensor
and for exiting dead ends. The second is used in rare
occasions when the robot may get stuck in a dead-end
with only a narrow corridor for returning. To avoid
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
412
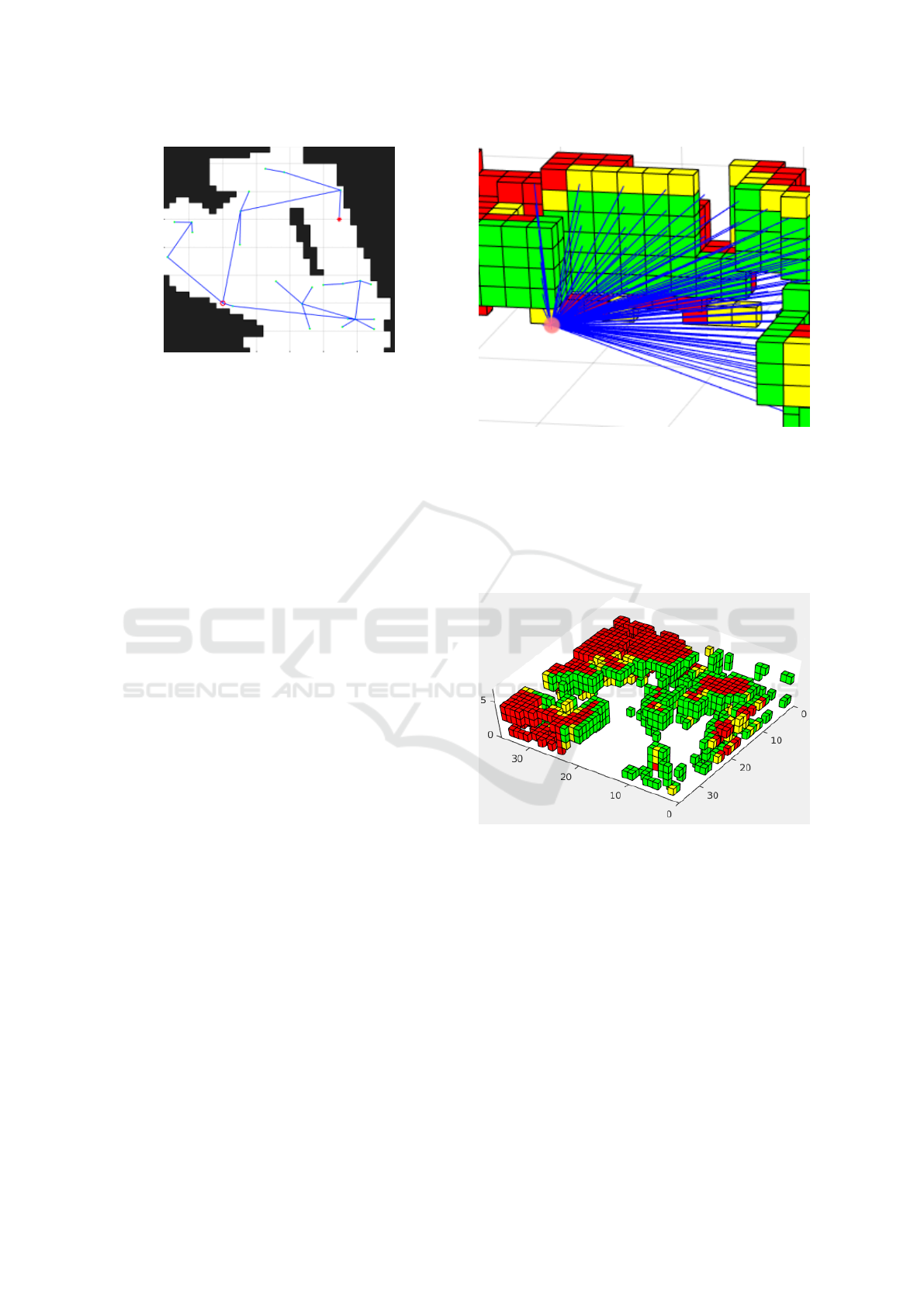
Figure 4: RRT* produces a tree with nodes as NBV view-
points. The process stops when the tree reaches the end
point (red dot) from the start point (red circle).
this we added another strategy with a different us-
age of RRT* without NBV gain: if the robot does
not receive information gain from RRT* planner for a
few steps then it finds a closest empty frontier and in-
creases the limit of nodes by a large number to ensure
the robot will find a way out.
3.2.2 Next-best-view Gain
Next-best-view is a class of problems that target for
optimizing an environment coverage path to minimize
a number of required camera shots. In addition next-
best-view term is widely used as a description for
views with high gain of new information about en-
vironment. Consecutively, every configuration ξ is a
point of view, which represents some part of an envi-
ronment by a set of visible and unmapped voxels. The
most common method for gathering this data is to cast
a grid of rays from a point of view with a given field
of view and limited distance. For this action we use a
raycast algorithm implementation for 3D voxel-based
grid (Williams et al., 2005). After all rays are pro-
jected, the next-best-view gain describes a proportion
between amount of occluded and not-occluded rays.
NBV raycasting concept is visualized in Fig. 5.
3.3 Random 2.5D Dense Clutter
Environment Generation
We propose an algorithm for generation of 2.5D clut-
tered environment for 3-DoF UGVs robot configura-
tion. In this paper 2.5D restricts 3D space by pro-
hibiting elevation in free space that is a typical struc-
ture inside buildings. Algorithm consists of two steps.
Firstly, we sample onto 2D plane a random set of
points and lines between them with a random width in
a way that there is no single point without a connec-
tion to some other point. The result defines collision-
free space. Secondly, we sample random voxels onto
Figure 5: Next-best-view gain is defined by a set of raycasts.
The density of rays is decreased for better visualisation.
3D space outside collision-free space with addition of
much smaller amount of random cuboids increasing
variety. For visualization we use a voxel plotting tool
that is made by (Shabat and Fischer, 2015). Figure 6
presents an example of a generated environment.
Figure 6: This figure shows a labeled generated environ-
ment. Observable voxels are green, non-observable voxels
are red, ”hard to observe” voxels are yellow (V
hto
). Walls
and voxels above the robot head are omitted for better visu-
alization.
4 VIRTUAL EXPERIMENTS
For this paper, we selected a 3-DoF configuration
UGV robot with position and yaw represented by
ξ = (x, y, ψ)
T
. All path-planning is done inside a
collision-free space. A depth sensor is located on a
fixed height from a ground plane, has a limited field
of view (90 degrees in horizontal axis and 70 degrees
in vertical axis) and a limited range (R = 15 voxels).
Towards Total Coverage in Autonomous Exploration for UGV in 2.5D Dense Clutter Environment
413
The depth sensor pitch is lowered to make sure the
robot can see a path in front, parts of environment
that are located above the robot head are not visible.
It is preferable to place the camera that way in order to
avoid an extensive search of a highest reachable voxel
rows, but for complete scanning results we plan to uti-
lize a high-DoF mobile robot with vertically mobile
camera as a part of our future work. The robot size
is 3x3x6 voxels. Generated environments are repre-
sented inside a 70x70x6 box. The limit for maximum
number of RRT* nodes is set relatively high for 2D
free space in order to increase a chance of obtaining
more V
hto
at the end of the coverage process. Convex
detection range is set higher than the sensing range,
but HTO scanning range is set lower to speed up com-
putations.
The algorithm was implemented in MATLAB,
except the Woo raycasting algorithm library (C++
code), which was compiled as a mexa64 file in order
to speed up the computations. We assume an ideal
3D reconstruction in our setup to achieve persistent
estimations for equivalent experiment settings. The
algorithm performance was evaluated with regard to
a RRT* planner (Bircher et al., 2016), although we
dismissed the idea of cutting off a current best branch
on the first node as it leads to worse performance in
our dense clutter environment than without it. Other
frontier algorithms were considered, but they lack the
ability to determine unreachable frontiers or can ig-
nore actually reachable frontiers while randomly sam-
pling viewpoints.
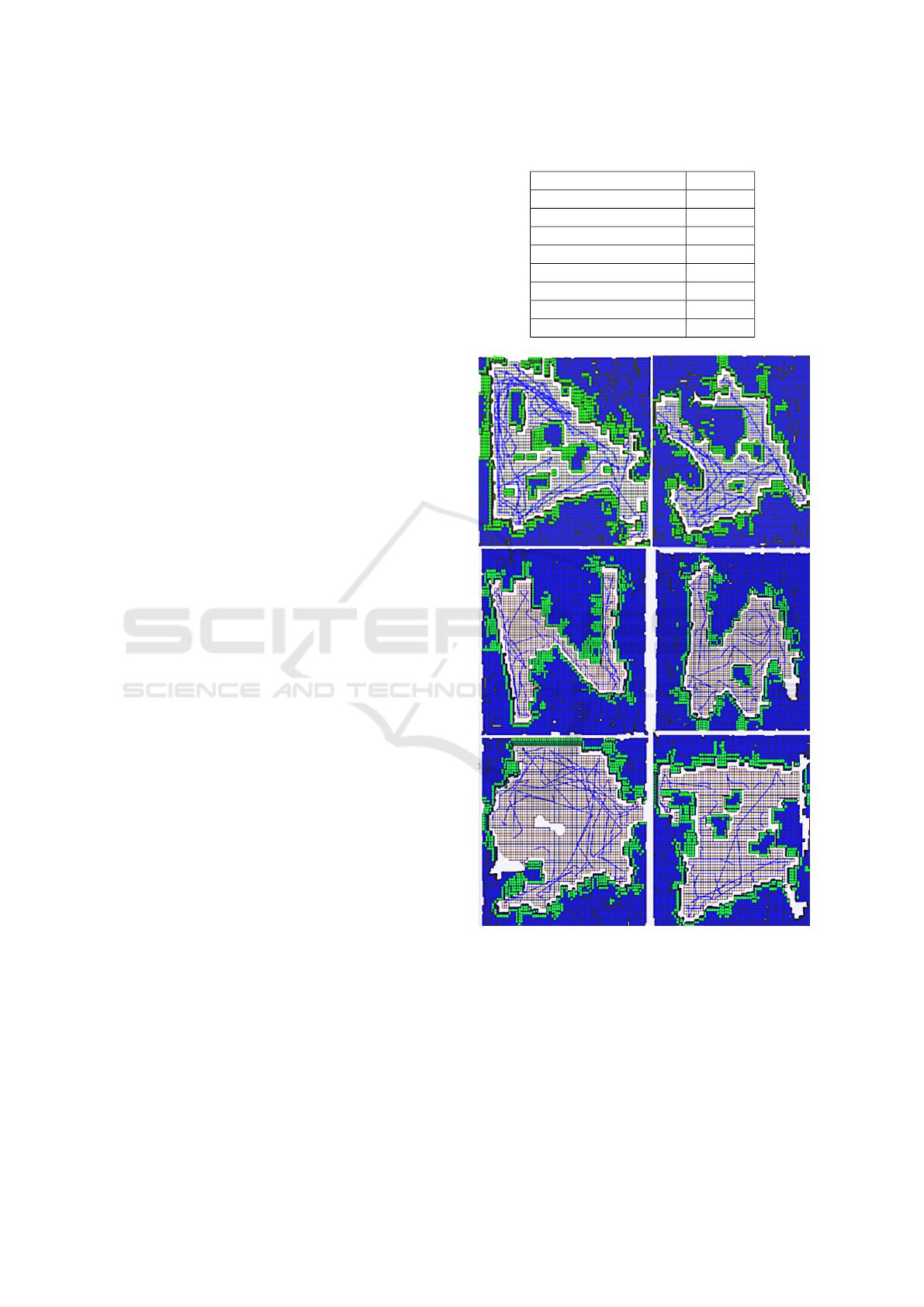
We took 6 generated maps (Fig. 7) from our ran-
dom environment generator. The maps were chosen
on the variety of quantity of V
hto
they have and topo-
logical differences. In every map the robot starts at
the left bottom corner. Due to stochastic nature of
the RRT* algorithm, we additionally included 3 ex-
tra trials for both planners on every map. Termination
condition for both planners in these simulation experi-
ments was set as a coverage of 97 % and usually HTO
planner explored all walls up to this point, so after 97
% both algorithms worked in the same way. The al-
gorithms parameters are presented in Table 1.
5 RESULTS
We evaluated performance of both algorithms com-
paring odometrical distance, computation time and
coverage (both V
hto
and V
occ
). Rotation was also in-
cluded in the distance metric. For evaluation we as-
sumed voxel’s size of 0.1m. Possible coverage for a
map was measured with the next-best-view method
with 360 degree angle from free space grid with dou-
Table 1: Parameters for algorithms. ’v’ stands for voxels.
Parameter Value
Sensor range 15 v
Robot’s height 6 v
Robot’s size 3x3 v
RRT* tree edge 6 v
λ for RRT* 0.4
RRT* max nodes 25
HTO scanning area 20x20 v
Convex detection area 40x40 v
Figure 7: All 6 generated maps after full or partial explo-
ration. Blue voxels are both unobserved and unobservable
voxels from ground truth and green voxels are explored vox-
els. Blue lines are taken paths in exploration.
bled density. V
hto
threshold was set to 9 which leads
in selected maps to 5-10 % of total coverage.
We run total coverage tests on several maps and it
took our planner to reach 96-97 % coverage with fully
explored obstacles (stated by our planner) in 600-900
s computation time, while for RRT* planner it took
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
414
1100-1600 s in average to obtain the same coverage
level (except for the most simple map that was once
completed in 601 s) The measurements did not take
into account huge distance penalties, which resulted
in extra thousands of meters (above 2000 m), while
our algorithm rarely went above 1000 m. An example
of the resulting paths by both planners are presented
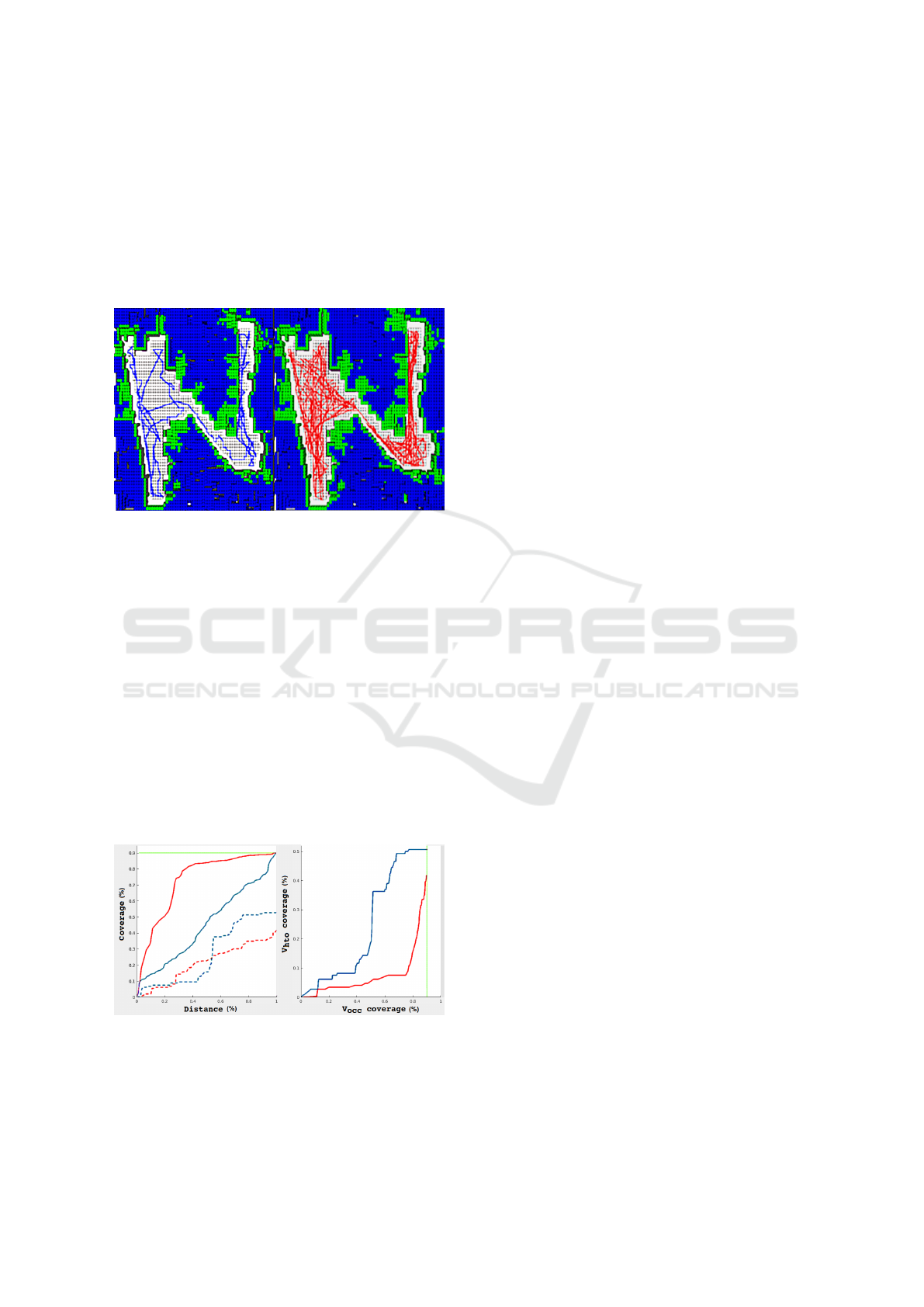
in Fig. 8.
Figure 8: An example of the resulting paths of our planner
(blue lines, on the left) and RRT* planner (red lines, on the
right).Both planners started at the left-bottom corner of the
map.
Total coverage measure of 100 % was not
achieved because we only check visibility of surface
voxel’s central point, while next-best-view method
uses raycasting visibility check for voxel’s edges. Re-
maining 3 % in most cases also contains more than
8 % of V
hto
. After checking total coverage we tried
employing our V
hto
metric as a prediction tool. Fig-
ure 9 shows that in most cases it is useful to define an
overall success of a selected algorithm rather than an
overall coverage. The plot on the right demonstrates
that our planner outperforms RRT* planner by V
occ
and V
hto
coverage rate and we link this success to to-
tal coverage success.
Figure 9: V
hto
coverage (dashed line) of our planner (red)
and RRT* planner (blue). The figure shows the worst case
scenario for our planner. RRT* planner’s V
hto
coverage is
generally worse and its coverage process is uneven.
6 FUTURE WORK
Our next goal is to further improve the proposed algo-
rithm. Firstly, currently we decided to accept a huge
rotation penalty it is much less than distance penalty.
Secondly, the shortcoming of limiting convex regions
is that this step ignores non-convex regions, which are
also important. Thirdly, although our planner out-
performs RRT* planner in minimizing traveled dis-
tance, it is more computationally demanding and re-
quires extensions for robots with movable sensor in
3D space (UAVs or High-DoF UGVs). Fourthly, there
is a lack of reliable parameters in order to deal with
random obstacles. We attempted to find more parame-
ters to improve quality of the resulting path-planning
in addition to restricting the robot within convex re-
gions, but the obtained solutions did not seem to work
better in general cases for dense clutter environment.
Therefore, an omnidirectional scanner would better
suite for our solution, but we do not limit the appli-
cation of our algorithm solely to this solution. Fifthly,
the random environment generator needs to be im-
proved towards a real 3D environment or (as a start-
ing point) should include obstacles above the robot’s
head, which would require major changes in our al-
gorithm.
Another goal, which is more technical that the
above mentioned improvements, is to port the both
planning and random environment generation algo-
rithms to C++ and to integrate them into Robotic Op-
erating System framework and to enable its function-
ality in Gazebo simulator (Afanasyev et al., 2015).
The random environment generator will be modified
to export generated models as 3D models for further
simulation experiments in Gazebo, which provides
actual physical simulation. Then we will re-evaluate
current restrictions that were taken for MATLAB sim-
ulation to be more suitable for real experiments. In
addition, we are interested to implement an instru-
ment of automatic map generation (similar to a con-
venient automatic map generation tool (Lavrenov and
Zakiev, 2017)) of dense clutter environments for fur-
ther autonomous exploration by a UGV in order to
provide a convenient benchmark for various coverage
algorithms comparison.
We believe that V
hto
metric could be a useful tool
for real world experiments, where it is possible to
check for hard to observe locations of an environment
and then check their representation in reconstruction
manually by scanning only those parts instead of tak-
ing an entire scan of the environment. After all, we
consider expanding the scope of our current work to
face more difficult problems,e.g., such as dynamic en-
vironment and multi-robot exploration.
Towards Total Coverage in Autonomous Exploration for UGV in 2.5D Dense Clutter Environment
415

7 CONCLUSIONS
In this paper, we presented a novel algorithm for
autonomous exploration and coverage problem for
UGVs in 3D dense clutter environment. The algo-
rithm plans the exploration path towards finding spe-
cific voxels that are hard to observe. Our approach
provided a solution that is more robust for 2.5D dense
clutter environment with highly non-linear contact-
space comparatively to currently known solutions, as
in practice they largely ignore such features as con-
tact space and narrow passages, while our algorithm
is opportunistically looking for such locations.
The MATLAB code is available for academic
community for research and educational purposes in
our Gitlab repository
1
.
ACKNOWLEDGEMENTS
The reported study was funded by the Russian Foun-
dation for Basic Research (RFBR) according to the
research project No. 19-58-70002. Part of the work
was performed according to the Russian Government
Program of Competitive Growth of Kazan Federal
University.
REFERENCES
Ad
´
an, A., Quintana, B., V
´
azquez, A. S., Olivares, A., Parra,
E., and Prieto, S. (2015). Towards the automatic scan-
ning of indoors with robots. In Sensors (Basel). 2015
May; 15(5): 11551–11574.
Afanasyev, I., Sagitov, A., and Magid, E. (2015). ROS-
based SLAM for a Gazebo-simulated mobile robot in
image-based 3D model of indoor environment. In In-
ternational Conference on Advanced Concepts for In-
telligent Vision Systems, pages 273–283. Springer.
Bircher, A., Kamel, M., Alexis, K., Oleynikova, H., and
Siegwart, R. (2016). Receding horizon ”next-best-
view” planner for 3d exploration. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), 2016.
Bircher, A., Kamel, M., Alexis, K., Oleynikova, H., and
Siegwart, R. (2018). Receding horizon path plan-
ning for 3d exploration and surface inspection. In Au-
tonomous Robots, February 2018, Volume 42, Issue 2,
pp 291–306.
Dang, T., Parachristos, C., and Alexis, K. (2018). Visual
saliency-aware receding horizon autonomous explo-
ration with application to aerial robotics. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), 2018.
1
https://gitlab.com/LIRS Projects/Simulation-3d-reconstru
ction/tree/master/autonomous exploration and coverage
Dornhege, C., Kleiner, A., and Kolling, A. (2013). Cover-
age search in 3d. In IEEE International Conference
on Robotics and Automation (ICRA), 2013.
Engel, J., Sch
¨
ops, T., and Cremers, D. (2014). Lsd-slam:
Large-scale direct monocular slam. In IEEE Euro-
pean Conference on Computer Vision (ECCV), 2014,
pp 834-849.
Gonz
´
alez-Banos, H. H. and Latombe, J.-C. (2002). Naviga-
tion strategies for exploring indoor environments. In
The International Journal of Robotics Research, vol.
21, no. 10-11, pp. 829–848, 2002.
Heng, L., Gotovos, A., Krause, A., and Pollefeys, M.
(2015). Efficient visual exploration and coverage with
a micro aerial vehicle in unknown environments. In
IEEE International Conference on Robotics and Au-
tomation (ICRA), 2015.
LaValle, S. M. (1998). Rapidly-exploring random trees a
new tool for path planning. Technical report.
Lavrenov, R., Matsuno, F., and Magid, E. (2017). Mod-
ified spline-based navigation: guaranteed safety for
obstacle avoidance. In International Conference on
Interactive Collaborative Robotics, pages 123–133.
Springer.
Lavrenov, R. and Zakiev, A. (2017). Tool for 3d gazebo map
construction from arbitrary images and laser scans.
In 2017 10th International Conference on Develop-
ments in eSystems Engineering (DeSE), pages 256–
261. IEEE.
Mendez, O., Hadfield, S., Pugeault, N., and Bowden, R.
(2017). Taking the scenic route to 3d: Optimising re-
construction from moving cameras. In IEEE Interna-
tional Conference on Computer Vision (ICCV), 2017.
Meng, Z., Qin, H., Chen, Z., Chen, X., Sun, H., Lin, F.,
and Ang Jr., M. H. (2017). A 2-stage optimized next
view planning framework for 3-d unknown environ-
ment exploration and structural reconstruction. In
IEEE Robotics and Automation Letters, Volume 2, Is-
sue 3, July 2017.
Senarathne, P. G. C. N. and Wang, D. (2016). Towards au-
tonomous 3d exploration using surface frontiers. In
IEEE International Symposium on Safety, Security,
and Rescue Robotics (SSRR), 2016.
Shabat, Y. B. and Fischer, A. (2015). Design of adaptive
porous micro-structures using curvature analysis for
additive manufacturing. In the 25th CIRP Design con-
ference. 2015, Haifa, Israel.
Williams, A., Barrus, S., Morley, R. K., and Shirley, P.
(2005). An efficient and robust ray-box intersection
algorithm. In SIGGRAPH ’05 ACM SIGGRAPH 2005
Courses, Article No. 9.
Zhang, G., Shang, B., Chen, Y., and Moyes, H. (2017).
Smartcavedrone: 3d cave mapping using uavs as
robotic co-archaeologists. In IEEE International
Conference on Unmanned Aircraft Systems (ICUAS),
2017.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
416
