
PORTOS: Proof of Data Reliability for Real-World Distributed
Outsourced Storage
Dimitrios Vasilopoulos, Melek
¨
Onen and Refik Molva
EURECOM, Sophia Antipolis, France
Keywords:
Secure Cloud Storage, Proofs of Reliability, Reliable Storage, Verifiable Storage.
Abstract:
Proofs of data reliability are cryptographic protocols that provide assurance to a user that a cloud storage
system correctly stores her data and has provisioned sufficient redundancy to be able to guarantee reliable
storage service. In this paper, we consider distributed cloud storage systems that make use of erasure codes
to guarantee data reliability. We propose a novel proof of data reliability scheme, named PORTOS, that on
the one hand guarantees the retrieval of the outsourced data in their entirety through the use of proofs of
data possession and on the other hand ensures the actual storage of redundancy. PORTOS makes sure that
redundancy is stored at rest and not computed on-the-fly (whenever requested) thanks to the use of time-
lock puzzles. Furthermore, PORTOS delegates the burden of generating the redundancy to the cloud. The
repair operations are also taken care of by the cloud. Hence, PORTOS is compatible with the current cloud
computing model where the cloud autonomously performs all maintenance operations without any interaction
with the user. The security of the solution is proved in the face of a rational adversary whereby the cheating
cloud provider tries to gain storage savings without increasing its total operational cost.
1 INTRODUCTION
Distributed storage systems guarantee data reliabil-
ity by redundantly storing data on multiple storage
nodes. Depending on the redundancy mechanism,
each storage node may store either a full copy of the
data (replication) or a fragment of an encoded ver-
sion of it (erasure codes). In the context of a trusted
environment such as an on-premise storage system,
this type of setting is sufficient to guarantee data reli-
ability against accidental data loss caused by random
hardware failures or software bugs.
With the prevalence of cloud computing, out-
sourcing data storage has become a lucrative op-
tion for many enterprises as they can meet their
rapidly changing storage requirements without hav-
ing to make tremendous upfront investments for in-
frastructure and maintenance. However, in the cloud
setting, outsourcing raises new security concerns with
respect to misbehaving or malicious cloud providers.
An economically motivated cloud storage provider
could opt to “take shortcuts” when it comes to data
maintenance in order to maximize its returns and thus
jeopardizing the reliability of user data. In addition,
cloud storage providers currently do not assume any
liability in case data is lost or damaged. Hence, cloud
users may be reluctant to adopt cloud storage services
for applications that are otherwise perfectly suited
for the cloud such as archival storage or backups.
As a result, technical solutions that aim at allowing
users to verify the long-term integrity and reliability
of their data, would be beneficial both to customers
and providers of cloud storage services.
Focusing on the long term integrity requirement,
the literature features a number of solutions for ver-
ifiable outsourced storage. Notably, proofs of re-
trievability (PoR) (Juels and Kaliski, 2007; Shacham,
H. and Waters, B., 2008) and data possession (PDP)
(Ateniese et al., 2007) are cryptographic mechanisms
that enable a cloud user to efficiently verify that her
data is correctly stored by an untrusted cloud storage
provider.
PoRs and PDPs have been extended in order to
ensure data reliability over time introducing the no-
tion of proofs of data reliability (Curtmola et al.,
2008; Bowers et al., 2009; Armknecht et al., 2016;
Vasilopoulos et al., 2018). In addition to the integrity
of a user’s outsourced data, a proof of data relia-
bility provides the user with the assurance that the
cloud storage provider has provisioned sufficient re-
dundancy to be able to guarantee reliable storage ser-
vice. In a straightforward approach, the cloud user
Vasilopoulos, D., Önen, M. and Molva, R.
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage.
DOI: 10.5220/0007927301730186
In Proceedings of the 16th International Joint Conference on e-Business and Telecommunications (ICETE 2019), pages 173-186
ISBN: 978-989-758-378-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
173

locally generates the necessary redundancy and sub-
sequently stores the data together with the redundancy
on multiple storage nodes. Previous work has estab-
lished that, in the case of erasure code-based stor-
age systems, the relation between the data and re-
dundancy symbols should stay hidden from the cloud
storage provider, otherwise, the latter could store a
portion of the encoded data only and compute any
missing symbols upon request. Similarly, in the case
of replication based storage systems, each storage
node should store a different replica; otherwise, the
cloud storage provider could simply store a single
replica. As a result, most proof of data reliability
schemes (Curtmola et al., 2008; Chen and Curtmola,
2017; Bowers et al., 2009; Chen et al., 2015) re-
quire some interaction with the user to repair dam-
aged data. Hence these schemes are at odds with auto-
matic maintenance that is a key feature of cloud stor-
age systems.
In this paper, we propose PORTOS, a proof of data
reliability scheme tailored to distributed cloud storage
systems that makes use of erasure codes to guaran-
tee data reliability. PORTOS achieves the following
properties against a rational cloud storage provider:
• Data reliability against t storage node failures:
PORTOS uses a systematic linear erasure code
to add redundancy to the outsourced data which
thereafter stores across multiple storage nodes.
The system can tolerate the failure of up to t stor-
age nodes, and successfully reconstruct the origi-
nal data using the contents of the surviving ones.
• Data and redundancy integrity: PORTOS lever-
ages a PDP scheme to verify the integrity of the
outsourced data and it further takes advantage of
the homomorphic properties of the PDP tags, in
order to verify the integrity of the redundancy.
Moreover, thanks to the combination of the PDP
scheme with erasure codes, PORTOS can provide
a cloud user with the assurance that she can re-
cover her data in their entirety.
• Automatic data maintenance by the cloud storage
provider: In PORTOS, the cloud storage provider
has the means to generate the required redun-
dancy, detect storage node failures and repair cor-
rupted data entirely on its own without any in-
teraction with the user conforming to the current
cloud model. This setting, however, allows a ma-
licious cloud storage provider to delete a portion
of the encoded data and compute any missing
symbols upon request. To defend against such an
attack, PORTOS relies on time-lock puzzles, and
masks the data, making the symbol regeneration
process time-consuming. In this way, a rational
cloud is provided with a strong incentive to con-
form to the proof of data reliability protocol.
• Real-world cloud storage architecture: PORTOS
conforms to the current model of erasure-code-
based distributed storage systems. Moreover, it
does not make any assumption regarding the sys-
tem’s underlying technology as opposed to prior
proof of data reliability schemes that also allow
for automatic data maintenance by the cloud stor-
age provider.
In summary, we make the following contributions
in this paper:
• We propose a new formal definition for proofs of
data reliability, which is more generic than the
definitions presented in prior work (Armknecht
et al., 2016).
• We present a novel proof of data reliability
scheme, named PORTOS, that on the one hand
guarantees that the outsourced data can be re-
trieved in their entirety through the use of proofs
of data possession and on the other hand ensures
the actual storage of redundancy. PORTOS makes
sure that redundancy is stored at rest and not com-
puted on-the-fly (whenever requested) thanks to
the use of time-lock puzzles. Furthermore, POR-
TOS delegates the burden of generating the re-
dundancy, as well as the repair operations, to the
cloud storage provider.
• We show that PORTOS is secure against a rational
adversary, and we further evaluate the impact of
two types of attacks, considering in both cases the
most favorable scenario for the adversary. Finally,
we evaluate the performance of PORTOS.
The remaining of this paper is organized as fol-
lows: In Section 2, we give an overview of prior work
in the field. We describe the formal definition, adver-
sary model, and security requirements of a proof of
data reliability scheme in Section 3. In Section 4, we
introduce PORTOS, a novel data reliability scheme
and we analyze its security in Section 5. Finally, in
Section 6 we analyze the performance of PORTOS.
2 PRIOR WORK
Replication-based Proofs of Data Reliability. The
authors in (Curtmola et al., 2008) propose a proof
of data possession scheme (PDP) which extends the
PDP scheme in (Ateniese et al., 2007) and enables the
client to verify that the cloud provider stores at least
t replicas of her data. In (Chen and Curtmola, 2013;
Chen and Curtmola, 2017), the replica differentiation
SECRYPT 2019 - 16th International Conference on Security and Cryptography
174

mechanism in (Curtmola et al., 2008) is replaced by a
tunable masking mechanism, which allows to shift the
bulk of repair operations to the cloud storage provider
with the user acting as a repair coordinator. In (Leon-
tiadis and Curtmola, 2018), the scheme in (Chen and
Curtmola, 2017) is extended in order to construct a
proof of data reliability protocol that allows for cross-
user file-level deduplication. The authors in (Barsoum
and Hasan, 2012; Barsoum and Hasan, 2015) pro-
pose a multi-replica dynamic PDP scheme that en-
ables clients to update/insert selected data blocks and
to verify multiple replicas of their outsourced files.
The scheme in (Etemad and K
¨
upc¸
¨
u, 2013), extends
the dynamic PDP scheme in (Erway et al., 2009) in or-
der to transparently support replication in distributed
cloud storage systems. In (Armknecht et al., 2016),
the authors propose a multi-replica PoR scheme that
delegates the replica construction to the cloud storage
provider. The scheme uses tunable puzzles as part of
its replication mechanism in order to force the cloud
storage provider to store the replicas at rest.
Erasure-code-based Proofs of Data Reliability.
The authors in (Bowers et al., 2009) propose HAIL
which provides a high availability and integrity layer
for cloud storage. HAIL uses erasure codes in order
to guarantee data retrievability and reliability among
distributed storage servers, and enables a user to de-
tect and repair data corruption. The work in (Chen
et al., 2015) redesigns parts of (Bowers et al., 2009)
in order to achieve a more efficient repair phase that
shifts the bulk computations to the cloud side. In
(Chen et al., 2010), the authors present a remote
data checking scheme for network-coding-based dis-
tributed storage systems that minimizes the commu-
nication overhead of the repair component compared
to erasure coding-based approaches. The work in (Le
and Markopoulou, 2012) extends the scheme in (Chen
et al., 2010) by improving the repair mechanism in or-
der to reduce the computation cost for the client, and
introducing a third party auditor. Based on the intro-
duction of this new entity, the authors in (Thao and
Omote, 2016) design a network-coding-based PoR
scheme in which the repair mechanism is executed
between the cloud provider and the third party auditor
without any interaction with the client. The authors in
(Bowers et al., 2011) propose RAFT, an erasure-code-
based protocol that can be seen as a proof of fault tol-
erance. RAFT relies on technical characteristics of ro-
tational hard drives in order to construct a time-based
challenge, that enables a client to verify that her en-
coded data is stored at multiple storage nodes within
the same data center. In (Vasilopoulos et al., 2018),
the authors propose POROS, a proof of data reliabil-
ity scheme for erasure-code-based cloud storage sys-
tems which combines PDP with time constrained op-
erations in order to force the cloud storage provider to
store the redundancy at rest. POROS dictates that all
the redundancy is stored permuted on a single stor-
age node and leverages the technical characteristics
of rotational hard drives to set a time threshold for
the generation of the proof. Both schemes enable the
outsourcing of the data encoding to the cloud storage
provider as well as automatic maintenance operations
without any interaction with the client.
Most of the proof of data reliability schemes pre-
sented above share a common system model, where
the user generates the required redundancy locally,
before uploading it together with the data to the cloud
storage provider. Furthermore, when corruption is de-
tected, the cloud cannot repair it autonomously, be-
cause either it expects some input from another entity
or all computations are performed by the client. The
solution in (Armknecht et al., 2016) outsources to the
cloud the redundancy generation, however, it relies
on replication to provide data reliability and hence is
not directly comparable to our proof of data reliability
scheme.
PORTOS is directly comparable with the work
in (Bowers et al., 2011) and in (Vasilopoulos et al.,
2018), in the sense that it also uses erasure codes to
guarantee data reliability and it delegates the burden
of generating the redundancy, as well as the repair op-
erations, to the cloud storage provider. Nonetheless,
in contrast to these schemes, our solution does not
make any assumption regarding the underlying stor-
age technology. Namely, both schemes rely on tech-
nical characteristics of rotational hard drives in order
to set a time-threshold for the cloud servers to respond
to a read request for a set of data blocks. Further-
more, unlike in PORTOS, the challenge verification
in (Bowers et al., 2011) requires that a copy of the
encoded data is stored locally at the user. Lastly, the
proof of data reliability scheme in (Vasilopoulos et al.,
2018) requires that all redundancy symbols are stored
the result on a single storage node without fragmenta-
tion. On the contrary, PORTOS does not deviate from
the standard model of erasure-code based distributed
storage systems.
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage
175

3 PROOFS OF DATA
RELIABILITY
3.1 Environment
We consider a setting where a user U produces a data
object D from a file D and subsequently outsources
D to an untrusted cloud storage provider C who com-
mits to store D in its entirety across a set of n storage
nodes {S
( j)
}
1≤ j≤n
with reliability guarantee t: stor-
age service guarantee against t storage node failures.
We define a proof of data reliability scheme as a pro-
tocol executed between the cloud storage provider C
with its storage nodes {S
( j)
}
1≤ j≤n
on the one hand
and a verifier V on the other hand. The aim of such
a protocol is to enable V to check and validate (i) the
integrity of D and, (ii) whether the reliability guaran-
tee t is satisfied. In order not to cancel out the storage
and performance advantages of the cloud, all this ver-
ification should be performed without V downloading
the entire content associated to D from {S
( j)
}
1≤ j≤n
.
We consider two different settings for a proof of data
reliability scheme: a private one where U is the veri-
fier and a public one where V can be any third party
except for C.
Formal Definition. A proof of data reliability
scheme comprises seven polynomial time algorithms:
Setup (1
λ
,t) → ({S
( j)
}
1≤ j≤n
, param
system
): This algo-
rithm takes as input the security parameter λ and
the reliability parameter t, and returns the set of
storage nodes {S
( j)
}
1≤ j≤n
, the system parameters
param
system
, and the specification of the redun-
dancy mechanism.
Store (1
λ
, D) → (K
U
, D, param
D
): This randomized al-
gorithm invoked by the user U takes as input the
security parameter λ and the to-be-outsourced file
D, and outputs the user key K
U
, the verifiable data
object D, which also includes a unique identifier
fid, and optionally, a set of data object parame-
ters param
D
. In a private proof of data reliability
scheme K
U
:= sk is the user’s secret key, whereas
in a public one K
U
:= (sk, pk) is the user’s pri-
vate/public key pair.
GenR (D,param
system
, param
D
) → (
˜
D): This algo-
rithm takes as input the verifiable data object
D, the system parameters param
system
, and op-
tionally, the data object parameters param
D
, and
outputs the data object
˜
D. Algorithm GenR may
be invoked either by the user U, when the user
generates the redundancy on her own; or by C,
when the redundancy computation is entirely out-
sourced to the cloud storage provider. Depending
on the redundancy mechanism,
˜
D may comprise
multiple copies of D or an encoded version of
it. Additionally, algorithm GenR generates the
necessary integrity values that will further help
for the integrity verification of
˜
D’s redundancy.
Chall (K
V
, param
system
) → (chal): This stateful and
probabilistic algorithm invoked by the verifier V
takes as input the verifier key K
V
and the system
parameters param
system
, and outputs a challenge
chal. In a private proof of data reliability scheme
the verifier key is the user’s secret key (K
V
:= sk),
whereas in a public one the verifier key is the
user’s public key (K
V
:= pk).
Prove (chal,
˜
D) → (proof): This algorithm invoked by
C takes as input the challenge chal and the data
object
˜
D, and returns C’s response proof of data
reliability.
Verify (K
V
, chal, proof, param
D
) → (dec): This deter-
ministic algorithm invoked by V takes as input
C’s proof corresponding to a challenge chal, the
verifier key K
V
, and optionally, the data object
parameters param
D
, and outputs a decision
dec ∈ {accept, reject} indicating a successful
or failed verification of the proof, respectively.
In a private proof of data reliability scheme the
verifier key is the user’s secret key (K
V
:= sk),
whereas in a public one the verifier key is the
user’s public key (K
V
:= pk).
Repair (
∗
˜
D,param
system
, param
D
) → (
˜
D): This al-
gorithm takes as input a corrupted data object
∗
˜
D together with its parameters param
D
and
the system parameters param
system
, and either
reconstructs
˜
D or outputs a failure symbol ⊥.
Algorithm Repair may be invoked either by U
or C depending on the proof of data reliability
scheme.
3.2 Adversary Model
Similar to (Armknecht et al., 2016; Vasilopou-
los et al., 2018), we consider an adversary model
whereby the cloud storage provider C is rational, in
the sense that C decides to cheat only if it achieves
some cost savings. For a proof of data reliability
scheme that deals with the storage of data and its re-
dundancy, a rational adversary would try to save some
storage space without increasing its overall opera-
tional cost. The overall operational cost is restricted to
the maximum number n of storage nodes {S
( j)
}
1≤ j≤n
whereby each of them has a bounded capacity of stor-
age and computational resources. More specifically,
assume that for some proof of data reliability scheme
there exists an attack which allows C to produce a
SECRYPT 2019 - 16th International Conference on Security and Cryptography
176

valid proof of data reliability while not fulfilling the
reliability guarantee t. If in order to mount this at-
tack, C has to provision either more storage resources
or excessive computational resources compared to the
resources required when it implements the protocol in
a correct manner, then a rational C will choose not to
launch his attack.
3.3 Security Requirements
A proof of data reliability scheme oughts to fulfill the
following requirements.
Req 0 : Correctness. A proof of data reliability
scheme should be correct: if both the cloud storage
provider C and the verifier V are honest, then on in-
put chal sent by the verifierV, using algorithm Chall,
algorithm Prove (invoked by C) generates a Proof
of Data Reliability proof such that algorithm Verify
yields accept with probability 1. Put differently, an
honest C should always be able to pass the verifica-
tion of proof of data reliability.
Req 1 : Extractability. It is essential for any proof
of data reliability scheme to ensure that an honest
user U can recover her file D with high probability.
This guarantee is formalized using the notion of ex-
tractability introduced in (Juels and Kaliski, 2007;
Shacham, H. and Waters, B., 2008). If a cloud stor-
age provider C can convince an honest verifier V with
high probability that it is storing the data object D to-
gether with its respective redundancy, then there ex-
ists an extractor algorithm that given sufficient inter-
action with C can extract the file D. To define this
requirement, we consider a game between an adver-
sary A and an environment, where A plays the role of
the prover likewise in (Shacham, H. and Waters, B.,
2008). The environment simulates all honest users
and verifiers, and it further provides A with oracles
for the algorithms Setup , Store , Chall , and Verify . A
interacts with the environment and requests O
Store
to
compute the tuple (sk, D, param
D
) for several chosen
files D and for different honest users. Thereafter, A
invokes a series of proof of data reliability executions
by interacting with O
Chall
and O
Verify
. Finally, A picks
a user U and a tuple (sk, D, param
D
), corresponding
to some file D and simulates a cheating cloud stor-
age provider C
0
. Let C
0
succeed in making algorithm
Verify yield dec := accept in an non-negligible ε frac-
tion of proof of data reliability executions. We say
that the proof of data reliability scheme meets the ex-
tractability guarantee, if there exists an extractor algo-
rithm such that given sufficient interactions with C
0
, it
recovers D.
Req 2 : Soundness of Redundancy Generation. In
addition to the extractability guarantee a proof of data
reliability scheme should ensure the soundness of the
redundancy generation mechanism. This entails that,
in the face of data corruption, the original file D can
be effectively reconstructed using the generated re-
dundancy. Hence, in proof of data reliability schemes
wherein algorithm GenR is implemented by the cloud
storage provider C, it is crucial to ensure that the latter
performs this operation in a correct manner. Namely,
an encoded data object should either consist of actual
codeword symbols or all replicas should be genuine
copies of the data object. In other words, the only
way C can produce a valid proof of data reliability is
by correctly generating the redundancy.
Req 3 : Storage Allocation Commitment. A cru-
cial aspect of a Proof of Data Reliability scheme, is
forcing a cloud storage provider C to store at rest
the outsourced data object D together with the rele-
vant redundancy. This requirement is formalized sim-
ilarly to the storage allocation guarantee introduced
in (Armknecht et al., 2016). A cheating cloud stor-
age provider C
0
that participates in the above men-
tioned extractability game (see Req 1), and dedicates
only a fraction of the storage space required for stor-
ing both D and its redundancy in their entirety, cannot
convince the verifier V to accept its proof with over-
whelming probability.
4 PORTOS
In this section, we present PORTOS: a proof of data
reliability scheme. PORTOS is based on the use of
erasure codes to offer reliable storage with automatic
maintenance. A user U sends a data object D to a
cloud storage provider C, which in turn encodes D
using a systematic linear (k, n)-MDS code (Xing and
Ling, 2003), and thereupon stores it across a set of n
storage nodes {S
( j)
}
1≤ j≤n
with reliability guarantee
against t storage node failures. Moreover, in POR-
TOS, C has the means to generate the required re-
dundancy, detect storage node failures, and repair cor-
rupted data, entirely on its own, without any interac-
tion with U.
Such setting, however, presents a cheating C with
the opportunity to misbehave, for instance, by not
fulfilling the storage allocation commitment require-
ment and computing the redundancy symbols on-the-
fly upon request. To prevent such behavior, PORTOS
leverages time-lock puzzles in order to augment the
resources (storage and computational) a cheating C
has to provision in order to produce a valid proof of
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage
177

Figure 1: Overview of PORTOS outsourcing process: (a) The user U computes the linearly-homomorphic tags for the original
data symbols; (b) U outsources the data object D to cloud storage provider C; (c) Using G, C applies the systematic erasure
code on both data symbols and their tags yielding the redundancy symbols and their corresponding tags; thereafter, C derives
the masking coefficients and masks all data and redundancy symbols.
data reliability. Nonetheless, this mechanism does not
incur any additional storage or computational cost to
an honest C that generates the same proof. Moreover,
the puzzle difficulty can be adapted to C’s computa-
tional capacity as it evolves over time. Therefore, a
rational C is provided with a strong incentive to con-
form to the proof of data reliability protocol rather
than attempt to misbehave. Figure 1 depicts the steps
of PORTOS outsourcing process.
4.1 Building Blocks
MDS Codes. Maximum distance separable (MDS)
codes (Xing and Ling, 2003; Suh and Ramchandran,
2011) are a class of linear block erasure codes used
in reliable storage systems that achieve the highest
error-correcting capabilities for the amount of stor-
age space dedicated to redundancy. A (k, n)-MDS
code encodes a data segment of size k symbols into a
codeword comprising n code symbols. The input data
symbols and the corresponding code symbols are ele-
ments of a finite field F
q
, where q is a large prime and
k ≤ n ≤ q. In the event of data corruption, the original
data segment can be reconstructed from any set of k
code symbols. Furthermore, up to n− k + 1 corrupted
symbols can be repaired. The new code symbols can
either be identical to the lost ones, in which case we
have exact repair, or can be functionally equivalent, in
which case we have functional repair where the orig-
inal code properties are preserved.
A systematic linear MDS-code has a generator
matrix of the form G = [I
k
| P] and a parity check ma-
trix of the form H = [−P
>
| I
n−k
]. Hence, in a system-
atic code, the code symbols of a codeword include the
data symbols of the original segment. Reed-Solomon
codes (Xing and Ling, 2003) are a typical example of
MDS codes, their generator matrix G can be easily
defined for any given values of (k, n), and are used by
a number of storage systems (Blaum et al., 1994).
Linearly–homomorphic Tags. PORTOS’s in-
tegrity guarantee derives from the use of linearly-
homomorphic tags proposed, for the design of the
private PoR scheme in (Shacham, H. and Waters, B.,
2008).
This scheme consists of the following algorithms:
SW.Store (1
λ
, D) → (fid, sk, D): This randomized al-
gorithm invoked by the user U, first picks
a pseudo-random function PRF : {0, 1}
λ
×
{0, 1}
∗
→ Z
q
, together with its pseudo-randomly
generated key k
prf
∈ {0, 1}
λ
and a non-zero ele-
ment α
R
← Z
q
, and subsequently computes a ho-
momorphic authentication tag for each symbol d
i
of the file D as follows:
σ
i
= αd
i
+ PRF(k
prf
, i) ∈ Z
q
, for 1 ≤ i ≤ n.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
178

Algorithm SW.Store then picks a unique identifier
fid, and terminates its execution by outsourcing
to the cloud storage provider C the authenticated
data object:
D :=
fid; {d
i
}
1≤i≤n
; {σ
i
}
1≤i≤n
.
SW.Chall (fid, sk) → (chal) : This algorithm invoked
by U picks l random elements ν
c
∈ Z
q
and l ran-
dom symbol indices i
c
, and sends to C the chal-
lenge
chal :=
(i
c
, ν
c
)
1≤c≤l
.
SW.Prove (D, chal) → (proof) : Upon receiving the
challenge chal, C invokes this algorithm which
computes the proof proof = (µ, τ) as follows:
µ =
∑
(i
c
,ν
c
)∈chal
ν
c
d
i
c
, τ =
∑
(i
c
,ν
c
)∈chal
ν
c
σ
i
c
.
SW.Verify (sk, proof, chal) → (dec) : This algorithm
invoked by U, verifies that the following equation
holds:
τ
?
= αµ +
∑
(i
c
,ν
c
)∈chal
ν
c
PRF(k
prf
, i
c
).
If proof is well formed, algorithm SW.Verify out-
puts dec := accept; otherwise it returns dec :=
reject.
Thanks to the unforgeability of homomorphic
tags, a malicious C cannot corrupt outsourced data
whilst eluding detection.
Time-lock Puzzles. A time-lock puzzle is a cryp-
tographic function that requires the execution of a
predetermined number of sequential exponentiation
computations before yielding its output. The RSA-
based puzzle of (Rivest et al., 1996) requires the re-
peated squaring of a given value β modulo N, where
N := p
0
q
0
is a publicly known RSA modulus, p
0
and
q
0
are two safe primes
1
that remain secret, and T is
the number of squarings required to solve the puzzle,
which can be adapted to the solver’s capacity of squar-
ings modulo N per second. Thereby, T defines the
puzzle’s difficulty. Without the knowledge of the se-
cret factors p
0
and q
0
, there is no faster way of solving
the puzzle than to begin with the value β and perform
T squarings sequentially. On the contrary, an entity
that knows p
0
and q
0
, can efficiently solve the puzzle
by first computing the value e := 2
T
(mod φ(N)) and
subsequently computing β
e
(mod N).
1
such that 2 is guaranteed to have a large order modulo
φ(N) where φ(N) = (p
0
− 1)(q
0
− 1)
PORTOS leverages the cryptographic puzzle of
(Rivest et al., 1996) to build a mechanism that en-
ables a user U to increase the computational load of a
misbehaving cloud storage provider C. To this end, C
is required to generate a set of pseudo-random values,
called masking coefficients, which are combined with
the symbols of the encoded data object D. C is ex-
pected to store at rest the masked data. More specif-
ically, in the context of algorithm Store , U outputs
two functions: the function maskGen which is sent to
C together with D and is used by algorithms GenR and
Repair ; and the function maskGenFast which is used
by U within the scope of algorithm Verify .
maskGen((i, j), param
m
) → m
( j)
i
: This function takes
as input the indices (i, j), and the tuple
param
m
:= (N, T , PRG
mask
, η
m
) comprising the
RSA modulus N := p
0
q
0
, the squaring coefficient
T , a pseudo-random generator PRG
mask
: Z
N
×
{0, 1}
∗
→ Z
N
2
, and a seed η
m
∈ Z
N
.
Function maskGen computes the masking coeffi-
cient m
( j)
i
as follows:
m
( j)
i
:=
PRG
mask
(η
m
, i k j)
2
T
(mod N).
maskGenFast((i, j), (p
0
, q
0
), param
m
) → m
( j)
i
: In addi-
tion to (i, j) and param
m
:= (N, T , PRG
mask
, η
m
),
this function takes as input the secret fac-
tors (p
0
, q
0
). Knowing p
0
and q
0
, function
maskGenFast efficiently computes the masking
coefficient m
( j)
i
by first computing the value e:
φ(N) := (p
0
− 1)(q
0
− 1), e := 2
T
(mod φ(N)),
m
( j)
i
:=
PRG
mask
(η
m
, i k j)
e
(mod N).
The puzzle difficulty can be adapted to the com-
putational capacity of C as it evolves over time such
that the evaluation of the function maskGen requires
a noticeable amount of time to yield m
( j)
i
. Further-
more, the masking coefficients are at least as large as
the respective symbols of D, hence storing the coeffi-
cients, as a method to deviate from our data reliability
protocol, would demand additional storage resources
which is at odds with C’s primary objective.
4.2 Protocol Specification
We now describe in detail the algorithms of PORTOS.
Setup (1
λ
,t) → ({S
( j)
}
1≤ j≤n
, param
system
) : Algorithm
Setup first picks a prime number q, whose size
2
such that its output is guaranteed to have a large order
modulo N.
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage
179
is chosen according to the security parameter
λ. Afterwards, given the reliability parameter
t, algorithm Setup yields the generator matrix
G = [I
k
| P] of a systematic linear (k, n)-MDS
code in Z
q
, for k < n < q and t ≤ n − k + 1. In
addition, algorithm Setup chooses n storage nodes
{S
( j)
}
1≤ j≤n
that are going to store the encoded
data: the first k of them are data nodes that will
hold the actual data symbols, whereas the rest
n − k are considered as redundancy nodes.
Algorithm Setup then terminates its execution by
returning the storage nodes {S
( j)
}
1≤ j≤n
and the
system parameters param
system
:= (k, n, G, q).
U.Store (1
λ
, D, param
system
) → (sk, D, param
D
,
maskGenFast): On input security parameter
λ, file D ∈ {0, 1}
∗
and, system parameters
param
system
, this randomized algorithm first splits
D into s segments, each composed of k data
symbols. Hence D comprises s · k symbols in
total. A data symbol is an element of Z
q
and is
denoted by d
( j)
i
for 1 ≤ i ≤ s and 1 ≤ j ≤ k.
Algorithm U.Store also picks a pseudo-random
function PRF : {0, 1}
λ
× {0, 1}
∗
→ Z
q
, together
with its pseudo-randomly generated key k
prf
∈
{0, 1}
λ
, and a non-zero element α
R
← Z
q
. Here-
after, U.Store computes for each data symbol a lin-
early homomorphic MAC as follows:
σ
( j)
i
= αd
( j)
i
+ PRF(k
prf
, i k j) ∈ Z
q
.
In addition, algorithm U.Store produces a time-
lock puzzle by generating an RSA modulus N :=
p
0
q
0
, where p
0
and, q
0
are two randomly-chosen
safe primes of size λ bits each, and specifies
the puzzle difficulty coefficient T , and the time
threshold T
thr
. Thereafter, algorithm U.Store
picks a pseudo-random generator PRG
mask
: Z
N
×
{0, 1}
∗
→ Z
N
3
together with a random seed η
m
R
←
Z
N
, and constructs the functions maskGen and
maskGenFast as described in Section 4.1
maskGen
(i, j), param
D
→ m
( j)
i
,
maskGenFast
(i, j), (p
0
, q
0
), param
D
→ m
( j)
i
.
Finally, algorithm U.Store picks a pseudo-random
generator PRG
chal
: {0, 1}
∗
→ [1, s]
l
and a unique
identifier fid.
Algorithm U.Store then terminates its execution
by returning the user key
sk :=
fid, (α, k
prf
), (p
0
, q
0
, maskGenFast)
,
3
such that its output is guaranteed to have a large order
modulo N.
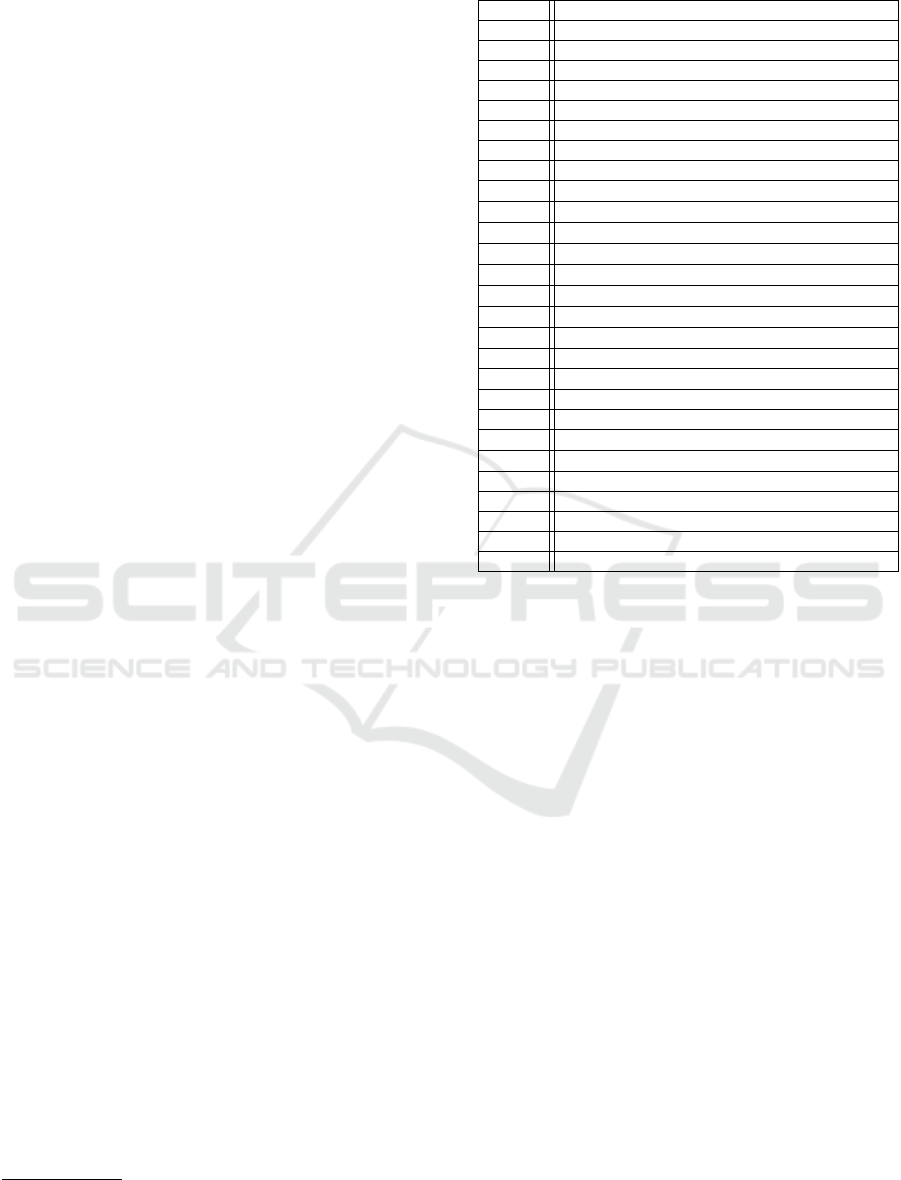
Table 1: Notation used in the description of PORTOS.
Notation Description
D File to-be-outsourced
D Outsourced data object (D consists of data and PDP tags)
˜
D Encoded and masked data object
S Storage node
G Generator matrix of the (n,k)-MDS code
α, k
prf
Secret key used by the linearly homomorphic tags
j Storage node index, 1 ≤ j ≤ n, (there are n S s in total)
i Data segment index, 1 ≤ i ≤ s, (D consist of s segments)
d
( j)
i
Data symbol, 1 ≤ j ≤ k and 1 ≤ i ≤ s
˜
d
( j)
i
Masked data symbol, 1 ≤ j ≤ k and 1 ≤ i ≤ s
σ
( j)
i
Data symbol tag, 1 ≤ j ≤ k and 1 ≤ i ≤ s
r
( j)
i
Redundancy symbol, k + 1 ≤ j ≤ n and 1 ≤ i ≤ s
˜r
( j)
i
Masked redundancy symbol, k + 1 ≤ j ≤ n and 1 ≤ i ≤ s
ψ
( j)
i
Redundancy symbol tag, k + 1 ≤ j ≤ n and 1 ≤ i ≤ s
m
( j)
i
Masking coefficient, 1 ≤ j ≤ n and 1 ≤ i ≤ s
η
m
Random seed used to generate m
( j)
i
p
0
, q
0
Primes for RSA modulus N := p
0
q
0
of the time-lock puzzle
T Time-lock puzzle’s difficulty coefficient
l Size of the challenge
T
thr
Time threshold for the proof generation
i
( j)
c
Indices of challenged symbols, 1 ≤ j ≤ n and 1 ≤ c ≤ l
η
( j)
Random seed used to generate i
( j)
c
, 1 ≤ j ≤ n
ν
c
Challenge coefficients, 1 ≤ c ≤ l
˜µ
( j)
Aggregated data/redundancy symbols, 1 ≤ j ≤ n
τ
( j)
Aggregated data/redundancy tags, 1 ≤ j ≤ n
J
f
Set of failed storage nodes
J
r
Set of surviving storage nodes
the to-be-outsourced data object together with the
integrity tags
D :=
n
fid; {d
( j)
i
}
1≤ j≤k
1≤i≤s
; {σ
( j)
i
}
1≤ j≤k
1≤i≤s
o
,
and the data object parameters
param
D
:=
PRG
chal
, maskGen,
param
m
:= (N, T , η
m
, PRG
mask
)
.
C.GenR (D, param
system
, param
D
) → (
˜
D): Upon re-
ception of data object D, algorithm C.GenR starts
computing the redundancy symbols {r
( j)
i
}
k+1≤ j≤n
1≤i≤s
by multiplying each segment d
i
:=
d
(1)
i
, . . . , d
(k)
i
with the generator matrix G = [I
k
| P]:
d
i
· [I
k
| P] =
d
(1)
i
, . . . , d
(k)
i
| r
(k+1)
i
, . . . , r
(n)
i
.
Similarly, algorithm C.GenR multiplies
the vector of linearly-homomorphic tags
σ
i
:=
σ
(1)
i
, . . . , σ
(k)
i
with G:
σ
i
· [I
k
| P] =
σ
(1)
i
, . . . , σ
(k)
i
| ψ
(k+1)
i
, . . . , ψ
(n)
i
.
One can easily show that {ψ
( j)
i
}
k+1≤ j≤n
1≤i≤s
are
the linearly-homomorphic authenticators of
{r
( j)
i
}
k+1≤ j≤n
1≤i≤s
.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
180

Thereafter, algorithm C.GenR generates the mask-
ing coefficients using the function maskGen:
{m
( j)
i
}
1≤ j≤n
1≤i≤s
:= maskGen
(i, j), param
m
(mod q),
and then, masks all data and redundancy symbols
as follows:
{
˜
d
( j)
i
}
1≤ j≤k
1≤i≤s
← {d
( j)
i
+ m
( j)
i
}
1≤ j≤k
1≤i≤s
, (1)
{˜r
( j)
i
}
k+1≤ j≤n
1≤i≤s
← {r
( j)
i
+ m
( j)
i
}
k+1≤ j≤n
1≤i≤s
. (2)
At this point, algorithm C.GenR deletes all mask-
ing coefficients {m
( j)
i
}
1≤ j≤n
1≤i≤s
and terminates its ex-
ecution by returning the encoded data object
˜
D :=
fid ;
{
˜
d
( j)
i
}
1≤ j≤k
1≤i≤s
{˜r
( j)
i
}
k+1≤ j≤n
1≤i≤s
{σ
( j)
i
}
1≤ j≤k
1≤i≤s
{ψ
( j)
i
}
k+1≤ j≤n
1≤i≤s
,
and by storing the data symbols {
˜
d
( j)
i
}
1≤ j≤k
1≤i≤s
to-
gether with {σ
( j)
i
}
1≤ j≤k
1≤i≤s
and the redundancy sym-
bols {˜r
( j)
i
}
k+1≤ j≤n
1≤i≤s
together with {ψ
( j)
i
}
k+1≤ j≤n
1≤i≤s
at
the corresponding storage nodes.
U.Chall (fid, sk, param
system
) → (chal): Provided with
the object identifier fid, the secret key sk, and the
system parameters param
system
, algorithm U.Chall
generates a vector (ν
c
)
l
c=1
of l random elements
in Z
q
together with a vector of n random seeds
(η
( j)
)
n
j=1
, and then, terminates by sending to all
storage nodes {S
( j)
}
1≤ j≤n
the challenge
chal :=
fid,
(η
( j)
)
n
j=1
, (ν
c
)
l
c=1
.
C.Prove (chal,
˜
D, param
D
) → (proof): On input of
challenge chal :=
fid,
(η
( j)
)
n
j=1
, (ν
c
)
l
c=1
,
object parameters param
D
:=
(PRG
chal
, maskGen, param
m
), and data ob-
ject D each storage node {S
( j)
}
1≤ j≤n
invokes
an instance of this algorithm and computes the
response tuple (˜µ
( j)
, τ
( j)
) as follows:
It first derives the indices of the requested symbols
and their respective tags
(i
( j)
c
)
l
c=1
:= PRG
chal
(η
( j)
), for 1 ≤ j ≤ n,
and subsequently, it computes the following linear
combination
˜µ
( j)
←
∑
l
c=1
ν
c
˜
d
( j)
i
( j)
c
, if 1 ≤ j ≤ k
∑
l
c=1
ν
c
˜r
( j)
i
( j)
c
, if k + 1 ≤ j ≤ n,
(3)
τ
( j)
←
∑
l
c=1
ν
c
σ
( j)
i
( j)
c
, if 1 ≤ j ≤ k
∑
l
c=1
ν
c
ψ
( j)
i
( j)
c
, if k + 1 ≤ j ≤ n.
(4)
Algorithm C.Prove terminates its execution by re-
turning the set of tuples:
proof :=
(˜µ
( j)
, τ
( j)
)
1≤ j≤n
.
U.Verify (sk, chal,proof, maskGenFast, param
D
) → (dec):
On input of user key sk := (α, k
prf
, p
0
, q
0
), chal-
lenge chal :=
fid,
(η
( j)
)
n
j=1
, (ν
c
)
l
c=1
,
proof proof :=
(˜µ
( j)
, τ
( j)
)
1≤ j≤n
, function
maskGenFast, and data object parameters
param
D
:= (PRG
chal
, maskGen, param
m
), this
algorithm first checks if the response time of all
storage nodes {S
( j)
}
1≤ j≤n
is shorter than the
time threshold T
thr
. If not algorithm U.Verify
terminates by outputting dec := reject; otherwise
it continues its execution and checks that all
tuples (˜µ
( j)
, τ
( j)
) in proof are well formed as
follows:
It first derives the indices of the requested symbols
and their respective tags
(i
( j)
c
)
l
c=1
:= PRG
chal
(η
( j)
), for 1 ≤ j ≤ n,
and it generates the corresponding masking coef-
ficients
{m
( j)
i
( j)
c
}
1≤ j≤n
1≤c≤l
:= maskGenFast
(i
( j)
c
, j), (p
0
, q
0
), param
D
Subsequently, it computes
˜
τ
( j)
:= τ
( j)
+ α ·
l
∑
c=1
ν
c
m
( j)
i
( j)
c
, (5)
and then it verifies that the following equations
hold
˜
τ
( j)
?
=
α˜µ
( j)
+
∑
l
c=1
ν
c
PRF(k
prf
, i
( j)
c
k j),
if 1 ≤ j ≤ k,
α˜µ
( j)
+
∑
l
c=1
ν
c
prf
i
( j)
c
· G
( j)
,
if k + 1 ≤ j ≤ n,
(6)
where G
( j)
denotes the j
th
column of generator
matrix G, and
prf
i
( j)
c
:=
PRF(k
prf
, i
( j)
c
k 1), . . . , PRF(k
prf
, i
( j)
c
k k)
is
the vector of PRFs for segment i
( j)
c
.
If the responses from all storage nodes
{S
( j)
}
1≤ j≤n
are well formed, algorithm U.Verify
outputs dec := accept; otherwise it returns
dec := reject.
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage
181

C.Repair (
∗
˜
D, J
f
, param
system
, param
D
, maskGen) → (
˜
D):
On input of a corrupted data object
∗
˜
D and a set of
failed storage node indices J
f
⊆ [1, n], algorithm
C.Repair first checks if |J| > n − k + 1, i.e., the
lost symbols cannot be reconstructed due to an
insufficient number of remaining storage nodes
{S
( j)
}
1≤ j≤n
. In this case, algorithm C.Repair
terminates outputting ⊥; otherwise, it picks
a set of k surviving storage nodes {S
( j)
}
j∈J
r
,
where J
r
⊆ [1, n] \ J
f
and, computes the masking
coefficients {m
( j)
i
}
j∈J
r
1≤i≤s
and {m
( j)
i
}
j∈J
f
1≤i≤s
, using
the function maskGen, together with the parity
check matrix H = [−P
>
| I
n−k
].
Thereafter algorithm C.Repair unmasks the sym-
bols held in {S
( j)
}
j∈J
r
and reconstructs the orig-
inal data object D using H. Finally, algo-
rithm C.Repair uses the generation matrix G and
the coefficients {m
( j)
i
}
j∈J
f
1≤i≤s
to compute and sub-
sequently mask the content of storage nodes
{S
( j)
}
j∈J
f
.
Algorithm C.Repair then terminates by outputting
the repaired data object
˜
D.
5 SECURITY ANALYSIS
Req 0 : Correctness. We now show that the verifi-
cation Equation 6 has to hold if algorithm C.Prove is
executed correctly. In particular, Equation 6 consists
of two parts: the first one defines the verification of
the proofs
(˜µ
( j)
, τ
( j)
)
1≤ j≤k
generated by the data
storage nodes {S
( j)
}
1≤ j≤k
; and the second part corre-
sponds to the proofs
(˜µ
( j)
, τ
( j)
)
k+1≤ j≤n
generated
by the redundancy storage nodes {S
( j)
}
k+1≤ j≤n
. By
definition the following equality holds:
σ
( j)
i
= αd
( j)
i
+ PRF(k
prf
, i k j), ∀1 ≤ i ≤ s, 1 ≤ j ≤ k (7)
We begin with the first part of Equation 6. By
plugging Equations 5 and 4 to
˜
τ
( j)
we get
˜
τ
( j)
= τ
( j)
+ α ·
l
∑
c=1
ν
c
m
( j)
i
( j)
c
=
l
∑
c=1
ν
c
σ
( j)
i
( j)
c
+ α ·
l
∑
c=1
ν
c
m
( j)
i
( j)
c
.
Thereafter, by Equation 7 we get
˜
τ
( j)
=
l
∑
c=1
ν
c
αd
( j)
i
( j)
c
+ PRF(k
prf
, i
( j)
c
k j)
+ α ·
l
∑
c=1
ν
c
m
( j)
i
( j)
c
= α ·
l
∑
c=1
ν
c
d
( j)
i
( j)
c
+ m
( j)
i
( j)
c
+
l
∑
c=1
ν
c
PRF(k
prf
, i
( j)
c
k j).
Finally, by plugging Equations 1 and 3 we get
˜
τ
( j)
= α˜µ
( j)
+
l
∑
c=1
ν
c
PRF(k
prf
, i
( j)
c
k j).
As regards to the second part of Equa-
tion 6 that defines the verification of the proofs
(˜µ
( j)
, τ
( j)
)
k+1≤ j≤n
generated by the redundancy
storage nodes {S
( j)
}
k+1≤ j≤n
, we observe that for
all c ∈ [1, l] it holds that redundancy symbols
r
( j)
i
( j)
c
= d
i
( j)
c
· G
( j)
and tags ψ
( j)
i
( j)
c
= σ
i
( j)
c
· G
( j)
, whereby
G
( j)
is the j
th
column of generator matrix G,
d
i
( j)
c
:= (d
(1)
i
( j)
c
, . . . , d
(k)
i
( j)
c
) is the vector of data symbols
for segment i
c
, and σ
i
( j)
c
:= (σ
(1)
i
( j)
c
, . . . , σ
(k)
i
( j)
c
) is the
corresponding vector of linearly homomorphic tags.
Hence, by Equation 7 the following equality always
holds:
ψ
( j)
i
( j)
c
= (αd
i
( j)
c
+ prf
i
( j)
c
) · G
( j)
= αr
( j)
i
( j)
c
+ prf
i
( j)
c
· G
( j)
,
where
prf
i
( j)
c
:=
PRF(k
prf
, i
( j)
c
k 1), . . . , PRF(k
prf
, i
( j)
c
k k)
is the vector of PRFs for segment i
( j)
c
. Thereby, given
the same straightforward calculations as in the case of
data storage nodes {S
( j)
}
1≤ j≤k
, we derive the follow-
ing equality:
˜
τ
( j)
= α˜µ
( j)
+
l
∑
c=1
ν
c
prf
i
( j)
c
· G
( j)
.
Req 1 : Extractability. We now show that POR-
TOS ensures, with high probability, the recovery of
an outsourced file D. To begin with, we observe
that algorithms C.Prove and U.Verify can be seen as
a distributed version of the algorithms SW.Prove and
SW.Verify of the private PoR scheme in (Shacham,
H. and Waters, B., 2008) executed across all stor-
age nodes {S
( j)
}
1≤ j≤n
. More precisely, we assume
that the MDS-code parameters (k, n) outputted by al-
gorithm Setup , fulfill the retrievability requirements
stated in (Shacham, H. and Waters, B., 2008), in ad-
dition to the reliability guarantee t.
We argue that given a sufficient number of inter-
actions with a cheating cloud storage provider C
0
, the
user U eventually gathers linear combinations of at
least k ≤ ρ ≤ n code symbols for each segment of data
object D. These linear combinations are of the form
˜µ
( j)
←
∑
l
c=1
ν
c
˜
d
( j)
i
( j)
c
, for 1 ≤ j ≤ k
∑
l
c=1
ν
c
˜r
( j)
i
( j)
c
, for k + 1 ≤ j ≤ n,
SECRYPT 2019 - 16th International Conference on Security and Cryptography
182

Table 2: Evaluation of the response time and the effort required by a storage node S to generate its response. The cheating
cloud storage provider C
0
tries to deviate from the correct protocol execution in two ways: (i) by storing the data object D
encoded but unmasked; and (ii) by not storing the data object
˜
D in its entirety. RTT is the round trip time between the user U
and C; Π is the number of computations S can perform in parallel; and T
puzzle
:= T ·T
exp
is the time required by S to generate
one masking coefficient.
Scenario: Response generation complexity for one S S ’s Response Time
Honest C: 2l mult + 2(l + 1) add T
resp
= RTT +
l
2l
Π
m
T
mult
+
l
2(l−1)
Π
m
T
add
T
0
resp
1
= RTT +
l
l
Π
m
T
puzzle
C
0
stores D unmasked: lT exp+2l mult + (3l − 2) add +
l
2l
Π
m
T
mult
+
l
3l−2
Π
m
T
add
S with missing symbol:
T exp +2l mult + (2l + k − 1) add
C
0
deletes up to s(n − k + 1) k S s participating in symbol generation: T
0
resp
2
= RTT + T
puzzle
symbols from
˜
D: T exp + (2l + 1) mult + (2l − 1) add +
l
2l+1
Π
m
T
mult
+
l
2l−1
Π
m
T
add
Remaining S s:
2l mult + 2(l − 1) add
for known coefficients (ν
c
)
l
c=1
and known indices i
( j)
c
and j. Furthermore, U can efficiently derive the un-
masked expressions
µ
( j)
←
∑
l
c=1
ν
c
d
( j)
i
( j)
c
, for 1 ≤ j ≤ k
∑
l
c=1
ν
c
r
( j)
i
( j)
c
, for k + 1 ≤ j ≤ n
by computing the masking coefficients {m
( j)
i
( j)
c
}
1≤ j≤n
1≤c≤l
using the function maskGenFast, and subtracting
from ˜µ
( j)
the corresponding linear combination
∑
l
c=1
ν
c
m
( j)
i
( j)
c
.
Hereby, the extractability arguments given in
(Shacham, H. and Waters, B., 2008) can be applied
to the aggregated output of algorithms C.Prove and
U.Verify . More precisely, given that C
0
succeeds in
making algorithm U.Verify yield dec := accept in an ε
fraction of the interactions, and the indices i
( j)
c
of the
challenge a chosen at random, then user U has at its
disposal at least ρ − ε > k correct code symbols for
each segment of data object D. Therefore, user U is
able to reconstruct the data object D using the parity
check matrix H = [−P
>
| I
n−k
].
Req 2 : Soundness of Redundancy Generation. In
PORTOS, the cloud storage provider C is the party
that generates the redundancy of the outsourced data
object D. Namely, the redundancy symbols and
{r
( j)
i
}
k+1≤ j≤n
1≤i≤s
and their tags {ψ
( j)
i
}
k+1≤ j≤n
1≤i≤s
are com-
puted by applying a linear combination over the
original data symbols {d
( j)
i
}
1≤ j≤n
1≤i≤s
and their tags
{σ
( j)
i
}
1≤ j≤n
1≤i≤s
, respectively. Hence, following Theo-
rem 4.1 in (Shacham, H. and Waters, B., 2008), if
the pseudo-random function PRF is secure, then no
cheating cloud storage provider C
0
will cause a veri-
fier V to accept in a proof of data reliability instance,
except by responding with values
˜µ
( j)
←
l
∑
c=1
ν
c
˜r
( j)
i
( j)
c
, for k + 1 ≤ j ≤ n,
τ
( j)
←
l
∑
c=1
ν
c
ψ
( j)
i
( j)
c
, for k + 1 ≤ j ≤ n.
that are computed correctly: i.e., by computing the
pair (˜µ, τ) using values ˜r
( j)
i
( j)
c
and ψ
( j)
i
( j)
c
which are the
output of algorithm C.GenR .
Req 3 : Storage Allocation Commitment. We now
show that a rational cheating cloud storage provider
C
0
cannot produce a valid proof of data reliability as
long as the time threshold T
thr
is tuned properly.
In essence, PORTOS consists of parallel proof
of data possession challenges over all storage nodes
{S
( j)
}
1≤ j≤n
: a challenge for each symbol of the code-
word. It follows that when a proof of data reliability
challenge contains symbols which are not stored at
rest, the relevant storage nodes cannot generate their
part of the proof unless C
0
is able to generate the miss-
ing symbols. Hereafter, we analyze the effort that C
0
has to put in order to output a valid proof of data relia-
bility in comparison to the effort an honest cloud stor-
age provider C has to put in order to output the same
proof. Given that the computational effort required
by C and C
0
can be translated into their response time
T
resp
and T
0
resp
, we can determine the lower and upper
bounds for the time threshold T
thr
.
A fundamental design feature of PORTOS is that
C
0
has to compute a masking coefficient for each sym-
bol of the encoded data object D. We observe that the
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage
183
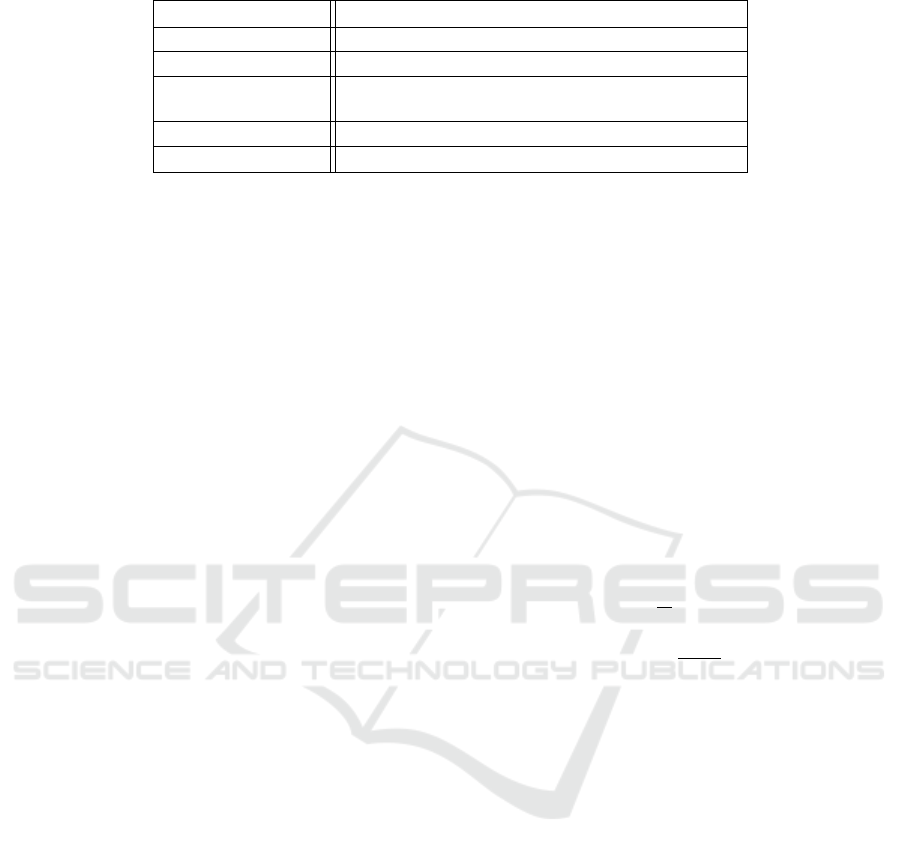
Table 3: PORTOS computation, communication, and storage costs.
Scheme PORTOS with Symbol Tags
U.Store complexity: sk PRF + sk mult + sk add
C.Prove complexity: n PRG
chal
+ 2nl mult + 2n(l + 1) add
n PRG
chal
+ 2nl exp +kl(n − k + 1) PRF
U.Verify complexity: +2n(l + 1) + kl(n − k) mult + (n −k)(kl + k + 2) add
Storage cost: 2× the size of D
Bandwidth: 2n symbols
masking coefficients have the same size as D’s sym-
bols. Hence, assuming that D cannot be compressed
more (e.g because it has been encrypted by the user),
a strategy whereby C
0
is storing the masking coeffi-
cients would effectively double the required storage
space. Moreover, a strategy whereby C
0
does not store
the content of up to n − k + 1 storage nodes and yet it
stores the corresponding masking coefficients, would
increase C
0
’s operational cost without yielding any
storage savings. Given that strategies that rely on stor-
ing the masking coefficients do not yield any gains in
terms of either storage savings or overall operational
cost, C
0
is left with two reasonable ways to deviate
from the correct protocol execution:
(i) The first one is to store the data object D en-
coded but unmasked. Although this approach
does not offer any storage savings, it signif-
icantly reduces the complexity of storing and
maintaining D at the cost of a more expensive
proof generation. More specifically, in order to
compute a PORTOS proof, C
0
has to generate 2l
masking coefficients {m
( j)
i
( j)
c
}
1≤ j≤n
1≤c≤l
.
(ii) The second way C
0
may misbehave, is by not
storing the data object
˜
D in its entirety and
hence generating the missing symbols involved
in a PORTOS challenge on-the-fly. In particu-
lar, C
0
can drop up to s(n −k + 1) symbols of
˜
D
either by not provisioning up to n − k + 1 stor-
age nodes; or by uniformly dropping symbols
from all n storage nodes {S
( j)
}
1≤ j≤n
, ensuring
that it preserves at least k symbols for each data
segment.
In order to determine the lower bound for the time
threshold T
thr
we evaluate the response time T
resp
of
an honest cloud storage provider C. Additionally, for
each type of C
0
’s malicious behavior we evaluate its
response time, and determine the upper bound for
the time threshold T
thr
as T
0
resp
= min(T
0
resp
1
, T
0
resp
2
),
where T
0
resp
1
and T
0
resp
2
denote C
0
’s response time
when it opts to keep D unmasked and delete sym-
bols of
˜
D, respectively. Concerning the evaluation of
T
0
resp
2
, we consider the most favorable scenario for
C
0
where it has to generate only one missing sym-
bol for a PORTOS challenge. Table 2 presents the
effort required by a storage node S in order to out-
put its response, for each of the scenarios described
above, together with the corresponding response time.
For the purposes of our analysis, we assume that all
storage nodes {S
( j)
}
1≤ j≤n
have a bounded capacity
of Π concurrent threads of execution, that compu-
tations —exponentiations, multiplications, additions,
etc.— require a minimum execution time, and that
T
add
T
exp
and T
add
T
mult
. Furthermore, we as-
sume that {S
( j)
}
1≤ j≤n
are connected with premium
network connections (low latency and high band-
width), and hence the communication among them
has negligible impact on C
0
response time. As given in
Table 2, Req 3 is met as long as the time threshold T
thr
is tuned such that it fulfills the following relations:
T
thr
> RTT
max
+
2l
Π
T
mult
(Lower bound),
T
thr
< RTT
max
+ T
puzzle
+
2l + 1
Π
T
mult
(Upper bound),
where RTT
max
is the worst-case RTT and T
puzzle
:= T ·
T
exp
is the time required by S to evaluate the function
maskGen. By carefully setting the puzzle difficulty
coefficient T , we can guarantee that T
resp
T
0
resp
and
RTT
max
T
0
resp
− T
resp
, and hence make our proof of
data reliability scheme robust against network jitter.
Finally, notice that PORTOS can adapt to C
0
’s com-
putational capacity as it evolves over time by tuning
T accordingly.
6 PERFORMANCE ANALYSIS
Table 3 summarizes the performance of PORTOS in
terms of computation, communication, and storage
costs. The computational effort required to verify
the response of a redundancy node {S
( j)
}
k+1≤ j≤n
is
much higher than the effort required to verify the re-
sponse of a data node {S
( j)
}
1≤ j≤k
. Namely, in addi-
tion to the 2nl exponentiations required by the func-
tion maskGenFast to generate the masking coeffi-
cients of the nl involved symbols, algorithm U.Verify
evaluates kl PRFs and k + 2(l + 1) multiplications in
SECRYPT 2019 - 16th International Conference on Security and Cryptography
184

order to verify the response of each redundancy node,
compared to the l PRFs and 2(l + 1) multiplications
it has to compute for the response of each data node.
We conclude that compared to existing erasure-code
based proof of data reliability schemes, namely (Bow-
ers et al., 2009; Chen et al., 2015; Vasilopoulos et al.,
2018), we achieve comparable computational gain
while enabling data repair at the cloud side. Neverthe-
less, we observe that storage and bandwidth costs re-
main important. In order to improve the performance
of our scheme and reduce these costs, we propose a
new version of PORTOS which namely implements
the storage efficient variant of the linearly homomor-
phic tags introduced in (Shacham, H. and Waters, B.,
2008). More specifically, instead of generating one
tag per symbol, the new algorithm U.Store computes
a linearly homomorphic tag for a data segment, com-
prising k symbols. Due to space constrains, we omit
the description of this new solution which will be in-
cluded in an extended technical report, that will be-
come available after the review process.
7 CONCLUSION
In this paper, we proposed PORTOS, a novel proof
of data reliability solution for erasure-code-based dis-
tributed cloud storage systems. PORTOS enables
users to verify the retrievability of their data, as well
as the integrity of its respective redundancy. More-
over, in PORTOS the cloud storage provider gener-
ates the required redundancy and performs data re-
pair operations without any interaction with the user,
thus conforming to the current cloud model. Thanks
to the combination of PDP with time-lock puzzles,
PORTOS provides a rational cloud storage provider
with a strong incentive to provision sufficient redun-
dancy, which is stored at rest, guaranteeing this way
a reliable storage service.
REFERENCES
Armknecht, F., Barman, L., Bohli, J.-M., and Karame, G. O.
(2016). Mirror: Enabling proofs of data replication
and retrievability in the cloud. In Proceedings of
the 25th USENIX Conference on Security Symposium,
SEC’16.
Ateniese, G., Burns, R., Curtmola, R., Herring, J., Kissner,
L., Peterson, Z., and Song, D. (2007). Provable data
possession at untrusted stores. In Proceedings of the
14th ACM Conference on Computer and Communica-
tions Security, CCS ’07.
Barsoum, A. F. and Hasan, M. A. (2012). Integrity veri-
fication of multiple data copies over untrusted cloud
servers. In Proceedings of the 12th IEEE/ACM Inter-
national Symposium on Cluster, Cloud and Grid Com-
puting, CCGRID ’12.
Barsoum, A. F. and Hasan, M. A. (2015). Provable mul-
ticopy dynamic data possession in cloud computing
systems. IEEE Transactions on Information Forensics
and Security, 10.
Blaum, M., Brady, J., Bruck, J., and Menon, J. (1994).
Evenodd: An optimal scheme for tolerating double
disk failures in raid architectures. In Proceedings of
the 21st Annual International Symposium on Com-
puter Architecture, ISCA ’94.
Bowers, K. D., Juels, A., and Oprea, A. (2009). Hail: A
high-availability and integrity layer for cloud storage.
In Proceedings of the 16th ACM Conference on Com-
puter and Communications Security, CCS ’09.
Bowers, K. D., van Dijk, M., Juels, A., Oprea, A., and
Rivest, R. L. (2011). How to tell if your cloud files
are vulnerable to drive crashes. In Proceedings of the
18th ACM Conference on Computer and Communica-
tions Security, CCS ’11.
Chen, B., Ammula, A. K., and Curtmola, R. (2015). To-
wards server-side repair for erasure coding-based dis-
tributed storage systems. In Proceedings of the 5th
ACM Conference on Data and Application Security
and Privacy, CODASPY ’15.
Chen, B. and Curtmola, R. (2013). Towards self-repairing
replication-based storage systems using untrusted
clouds. In Proceedings of the Third ACM Conference
on Data and Application Security and Privacy, CO-
DASPY ’13.
Chen, B. and Curtmola, R. (2017). Remote data integrity
checking with server-side repair. Journal of Computer
Security, 25.
Chen, B., Curtmola, R., Ateniese, G., and Burns, R. (2010).
Remote data checking for network coding-based dis-
tributed storage systems. In Proceedings of the 2010
ACM Workshop on Cloud Computing Security Work-
shop, CCSW ’10.
Curtmola, R., Khan, O., Burns, R., and Ateniese, G. (2008).
Mr-pdp: Multiple-replica provable data possession. In
Proceedings of the 28th International Conference on
Distributed Computing Systems, ICDCS ’08.
Erway, C., K
¨
upc¸
¨
u, A., Papamanthou, C., and Tamassia, R.
(2009). Dynamic provable data possession. In Pro-
ceedings of the 16th ACM Conference on Computer
and Communications Security, CCS ’09.
Etemad, M. and K
¨
upc¸
¨
u, A. (2013). Transparent, dis-
tributed, and replicated dynamic provable data posses-
sion. In Proceedings of the 11th International Confer-
ence on Applied Cryptography and Network Security,
ACNS’13.
Juels, A. and Kaliski, Jr., B. S. (2007). Pors: Proofs of
retrievability for large files. In Proceedings of the 14th
ACM Conference on Computer and Communications
Security, CCS ’07.
Le, A. and Markopoulou, A. (2012). Nc-audit: Auditing
for network coding storage. In Proceedings of Inter-
national Symposium on Network Coding, NetCod ’12.
PORTOS: Proof of Data Reliability for Real-World Distributed Outsourced Storage
185

Leontiadis, I. and Curtmola, R. (2018). Secure storage with
replication and transparent deduplication. In Proceed-
ings of the Eighth ACM Conference on Data and Ap-
plication Security and Privacy, CODASPY ’18.
Rivest, R. L., Shamir, A., and Wagner, D. A. (1996). Time-
lock puzzles and timed-release crypto. Technical re-
port, Cambridge, MA, USA.
Shacham, H. and Waters, B. (2008). Compact proofs of re-
trievability. In Proceedings of the 14th International
Conference on the Theory and Application of Cryp-
tology and Information Security: Advances in Cryp-
tology, ASIACRYPT ’08.
Suh, C. and Ramchandran, K. (2011). Exact-repair mds
code construction using interference alignment. IEEE
Trans. Inf. Theor., 57(3).
Thao, T. P. and Omote, K. (2016). Elar: Extremely
lightweight auditing and repairing for cloud security.
In Proceedings of the 32nd Annual Conference on
Computer Security Applications, ACSAC ’16.
Vasilopoulos, D., Elkhiyaoui, K., Molva, R., and Onen, M.
(2018). Poros: Proof of data reliability for outsourced
storage. In Proceedings of the 6th International Work-
shop on Security in Cloud Computing, SCC ’18.
Xing, C. and Ling, S. (2003). Coding Theory: A First
Course. Cambridge University Press, New York, NY,
USA.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
186
