
Detecting, Opening and Navigating through Doors:
A Unified Framework for Human Service Robots
Francesco Savarese
1,2
, Antonio Tejero-de-Pablos
2
, Stefano Quer
1
and Tatsuya Harada
2
1
DAUIN Department of Control and Computer Engineering, Politecnico di Torino, Turin, Italy
2
Machine Intelligence Lab., The University of Tokyo, Tokyo, Japan
Keywords:
Service Robotics, Door Opening, State Machines, Object Detection, Autonomous System.
Abstract:
For an autonomous robotic system, detecting, opening, and navigating through doors remains a very challeng-
ing problem. It involves several hard-to-solve sub-tasks such as recognizing the door, grasping the handle,
discriminating between pulling or pushing the door, and detecting locked doors. Previous works tackle in-
dividual sub-problems, assuming that the robot is already facing the door handle or that the robot knows in
advance the exact location of the door. However, ignoring the navigation through the door, using specialized
robots, or specific types of doors, reduce the applicability of existing approaches. In this paper, we present a
unified framework for the door opening problem, by taking a navigation scenario as a reference. We implement
specific algorithms to solve each sub-task, and describe the hierarchical automata which integrates the control
of the robot during the entire process. Moreover, we implement error recovery mechanisms to add robustness
and to guarantee a high success rate. We carry out experiments on a realistic scenario using a standard service
robot, the Toyota Human Support Robot. We show that our framework can successfully detect, open, and
navigate through doors in a reliable way, with low error rates, and without adapting the environment to the
robot. Our experiments demonstrate the high applicability of our framework.
1 INTRODUCTION
First attempts of human-robot cooperation focused on
robots capable of guiding people in public environ-
ments like museums (Burgard et al., 1998; Kim et al.,
2004; Thrun et al., 1999). However, influenced by the
aging population problem, current service robotics is
mainly focusing on the design of robots to assist el-
derly people, or people with mobility impairments, in
their daily life at home (Khatib, 1999). Nowadays,
robots are able to work in environments like houses or
offices to perform common tasks such as picking up
objects or delivering articles. They have also reached
a high level of human-robot cooperation (Hernandez
et al., 2017; Johnson et al., 2015; Krotkov et al., 2017;
Lim et al., 2018). Overall, current approaches empha-
size the ability to autonomously navigate unknown
environments and to interact with humans.
To freely navigate in unmodified domestic envi-
ronments, robots have to be able to perform basic ob-
stacle avoidance and handle complex situations. In
particular, one very common and still unsolved prob-
lem is opening a door, without the human assistance.
Door opening has drawn attention because of its com-
plexity, and because it involves different sub-tasks
such as handle recognition, handle grasping, discrim-
ination between pulling or pushing the door, and the
detection of locked doors.
1.1 Related Works
Recent works have approached the problem of door
opening using robots designed or specifically modi-
fied for the target. For example (Rhee et al., 2004)
adopts an exclusive robot whose hand is specifically
designed for the door opening task. Other approaches,
e.g., (Aude et al., 2006; Chitta et al., 2010; Ott et al.,
2007), detect doors and handles relying on data fu-
sion information coming from cameras, lasers, and
other sensors. Andreopoulos et al. (Andreopoulos and
Tsotsos, 2007) tried to solve the door opening prob-
lem using a robotics wheelchair. They used a com-
puter vision approach based on Viola-Jones for door
and handle recognition. However, they only stud-
ied handle detection and grasping, without propos-
ing a method for door opening. Boston Dynamics
1
1
https://www.bostondynamics.com/spot-mini.
416
Savarese, F., Tejero-de-Pablos, A., Quer, S. and Harada, T.
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots.
DOI: 10.5220/0007947604160427
In Proceedings of the 14th International Conference on Software Technologies (ICSOFT 2019), pages 416-427
ISBN: 978-989-758-379-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

presented a solution based on the cooperation of two
SpotMini robots. However, given the robot structure
(i.e., a four-legged robot), it is hard to transfer the ap-
proach to common service robots. Moreover, their ap-
proach is not public.
Many works concentrate on independent tasks of
the door opening problem, often neglecting naviga-
tion issues. For example, the research in (Petrovskaya
and Ng, 2007; Rhee et al., 2004; Peterson et al., 2000;
Dongwon et al., 2004) only tackles handle unlatch-
ing and door opening, obviating approaching the door
and navigating through it. For that reason, their major
limitation lies on the premise that the robot is initially
facing the door to detect the handle. The position of
the robot with respect to the door can influence signif-
icantly the success of the detection process, meaning
that the robot needs to know the door position in the
space to proceed correctly. Thus, they are not suitable
for realistic scenarios in which the robot is moving.
The challenging task of door opening while navi-
gating has also received a lot of attention. Meeussen
et al. (Meeussen et al., 2010) propose a framework
that integrates autonomous navigation and door open-
ing. For door detection, they use a point cloud repre-
sentation, while for handle recognition, they combine
laser scans and a computer vision approaches. Al-
though they analyzed the entire navigation and door
opening problem, their approach requires the knowl-
edge of several details on the environment, such as
the door width and the door type. Similar considera-
tions can be made for Chitta et al. (Chitta et al., 2010),
where a planning algorithm is proposed for opening
(pulling and pushing) doors, but the robot needs to
know in advance if the target door is a pulling or
a pushing one. As the first task to solve to open a
door is to find the door and detect the handle, Kim
et al. (Kim et al., 2011) solve the detection task us-
ing a video cameras. However the proposed method
detects doors using a context-based object recogni-
tion approach, limiting its applicability to well known
environments. Shalaby et al. (Shalaby et al., 2014)
base their recognition task completely on a vision
system. The task is accomplished pairing visual in-
formation and door geometric description. However,
the approach requires a prior knowledge of doors de-
tails (such as the handle height) limiting the method
applicability to only well-known scenarios. Rusu et
al. (Rusu et al., 2009) use a laser perception-based
to robustly estimate the handle position. Klingbeil et
al. (Klingbeil et al., 2010) combine a visual algorithm
with laser data to locate the handle in the space. How-
ever, after handle unlatching, they do not tackle the
problem of door opening. Jain et al. (Jain and Kemp,
2008) roughly estimate the handle position using a
laser scan. After that, the robot haptically searches
for the door handle over the surface of the door. Af-
ter the handle unlatching, the door is pushed to be
opened. They do not study the case of pulling door
and they do not move the robot through the door. Gray
et al. (Gray et al., 2013) focus their attention to both
non-spring and spring-loaded doors. They propose
a graph-based planning algorithm for opening both
pulling and pushing doors. However, they do not ana-
lyze the entire problem flow. Moreover, their opening
strategy requires to store additional information about
the doors. Fern
´
andez et al. (Fern
´
andez-Caram
´
es et al.,
2014) proposed a method for detecting doors in corri-
dors by detecting vertical lines from images obtained
with a laser scan. The goal of this method is not open-
ing the door (since it cannot detect handles), but to use
the detected doors as a reference to correct the robot
position in the map.
1.2 Contributions
The tasks required in a robust unified pipeline for
door opening and navigation that does not rely in prior
knowledge of the door characteristics are: Door and
handle detection, door type/opening direction estima-
tion, handle grasping, and finally navigation through
the door. None of the aforementioned works tackle
this pipeline in its entirety. Moreover, while an
off-the-shelf system is desirable, most of them use
custom-made robots that hinder reproducibility.
In this work, we present a unified framework to
open doors while navigating the environment. We
suppose no prior knowledge of the characteristics of
the doors. We also recognize whether the door has
to be pushed or pulled, and we perform appropriate
actions to open it. We present a detailed hierarchical
automata model of our framework. Using this model,
we decompose the overall task into sub-tasks, and we
perform proper error recovery during all main phases.
We solve the implied sub-problems adopting a uni-
fied approach, providing detailed explanations of the
resulting automata. For door and handle location es-
timation, we leverage a deep learning approach for
automatic detection of doors and handles. In order to
train such a detector, we contribute with the “MIL-
door” data-set
2
. This approach allows our robot to
recognize doors and handles even while navigating
unknown environments, that is, without previously
knowing their existence. After the door and the han-
dle are detected, depth images are used to evaluate the
location of the handle more precisely.
We assume the robot navigates an unmodified
house, that is, a house furnished with common fur-
2
https://www.mi.t.u-tokyo.ac.jp/projects/mildoor.
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots
417

niture pieces and with non-automatic doors. In our
framework all door characteristics, i.e., door width,
handle position, and opening direction, are estimated
at run-time. Moreover, our approach performs auto-
matic door type detection (pushing or pulling) which
is particularly important in real world scenarios. Our
proposed framework also considers robot navigation
in a structured environment, admitting semantic nav-
igation. This allows studying the door opening prob-
lem from the perspective of a realistic navigation
problem. To evaluate our framework, we chose a
complex task among the Robocup 2018
3
challenges
(i.e., the “Help Me Carry” task).
The proposed solution is more appropriate for
real applications than the all aforementioned previ-
ous works. Moreover, we implemented it into a stan-
dard general purpose robot, namely, the Toyota Hu-
man Support Robot (HSR)
4
, whereas the majority of
the proposed solutions use specific architectures, such
as the Personal Robot 2 (PR2) robotic platform, de-
veloped by Willow Garage
5
. We present extensive
experimentation using a standard domestic robot plat-
form in a realistic scenario, and we show the high ap-
plicability of our approach.
2 CONFIGURATION
2.1 Hardware Platform
As our development platform, we used the Toyota
Human Support Robot (HSR). The robot is aimed
at helping elderly people and people with disabili-
ties. Given its design, HSR is optimal for operating in
home settings without any modification that facilitates
its tasks (e.g., automatic doors). Toyota also provides
some primitives and some basic software routine for
controlling the robot.
The HSR body is cylindrical with a set of wheels
that makes the robot movable in all directions. It is
equipped with a folding arm capable of grabbing ob-
jects, manipulating handles and even grasping paper
sheets from the floor. Thanks to its microphone array
and its speakers, HSR is able to receive voice com-
mands and communicate with the user. Several sen-
sors allow the robot interacting with the surrounding
environment. The HSR head is equipped with a stereo
video camera and a depth camera. The robot base is
equipped with a collision detector. The Robot Operat-
3
http://www.robocup2018.com.
4
https://www.toyota-global.com/innovation/partner -
robot/robot/#link02.
5
http://www.willowgarage.com.
Help Me Carry
Voice Other
ResultsResults
Voice
Inputs
Other
Other Tasks SM
Task SM
State Machine Container
Speech−To−Text
Text−To−Speech
Commands
Figure 1: Our Robot Software Architecture consists of
three layers: A speech to text layer for command process-
ing, a state machine container layer that activates state ma-
chines according to the task, and a text to speech layer for
result conveying.
ing System (ROS)
6
is installed on the robot, allowing
communicating with the hardware layer. This way,
writing low level controlling algorithms is not neces-
sary.
2.2 Software Architecture
Figure 1 shows our software architecture. We de-
signed it to implement the robot’s functionality, and it
is the backbone of the entire system. It allows manag-
ing several basic tasks, the human-robot interaction,
and easily adding new functionality on-demand (e.g.,
replacing voice commands with visual QR-code in-
puts). This improves system versatility, but it is not
essential for the paper’s goal.
We defined three different layers:
• A command processing layer (speech-to-text).
We use the HSR’s microphone array to capture the
user command, and then we internally process it.
• A container (state machine container). State ma-
chines are deployed to solve different tasks.
• A user-friendly communication layer (text-to-
speech). This is used to convey the operation re-
sults to the user.
The first layer processes the user’s voice command,
and it forwards the result to the second layer. To in-
terpret the voice command, and generate a command,
we used the Google Cloud Speech-to-Text API
7
. This
tool allows developers to convert speech into text ex-
ploiting the power of neural networks and using the
Google Cloud suite. Depending on the given com-
mand, the second layer activates the proper state ma-
6
http://www.ros.org.
7
https://cloud.google.com/speech-to-text.
ICSOFT 2019 - 14th International Conference on Software Technologies
418

chine to execute the task required by the user. The
third layer receives the results of the state machines,
which are interpreted and communicated to the user in
a user-friendly fashion. The state machine container
is the element that provides flexibility to the entire ar-
chitecture. It is possible, in fact, to embed new state
machines for executing tasks. We implement all state
machines using SMACH
8
.
2.3 Semantic Navigation Framework
For the path planning we rely on the ROS global and
local path planners. These modules receive the de-
sired coordinates in the space, and they convert these
coordinates into commands to move the robot. Using
the ROS navigation stack built-in Hector-SLAM algo-
rithm (Kohlbrecher et al., 2011) we can create a map
describing the environment and the obstacles. This
map allows the robot to receive coordinates and reach
specific locations by automatically choosing an opti-
mal path free of obstacles. However, semantic naviga-
tion requires a richer description of the environment
to convert human understandable locations (e.g., the
kitchen table) into suitable coordinates for the robot.
As a consequence, additional information needs to be
added to the map to improve the knowledge about the
environment. We propose a framework for creating
and managing semantic maps. This framework works
as an interface layer, converting the location sent by
the user to a location understandable by the motion
planning module. Using RVIZ
9
we manually asso-
ciate coordinates in the path planner map to human
understandable locations. The association among co-
ordinates and locations are stored as metadata into an
xml, and a csv files.
We manage two different types of entities in the
environment: Rooms and locations. A room is a por-
tion of the map identified by walls or boundaries. Lo-
cations are places inside rooms. Each room can con-
tain multiple locations. A room entity is identified by
its name and it is represented by a list of corners, ar-
ranged as a polygon, plus a room center. To manage
polygons and coordinates we use the python pack-
age matplotlib.path. A location, on the other hand,
is represented by a location name, its coordinates in
the map and some attributes describing the place (e.g.,
“isStorage” is a Boolean attribute stating if the loca-
tion is a storage area). The hierarchical relationship
between rooms and locations are stored in xml format
while the room and location names with their respec-
tive coordinates are stored in csv format.
8
small SMACH is a ROS-independent Python library
for building hierarchical state machines.
9
RVIZ is a tool for displaying sensor data using ROS.
Figure 2: Example of a map for the navigation environ-
ment, with rooms (R), doors (D), and locations (Bed).
Figure 2 is a graphical representation of a possi-
ble environment map, where R1–R5 designate rooms
and D1–D4 indicate doors. R3 and R5 are not sepa-
rated by a wall. The position of elements in the map
is retrieved with respect a fixed reference system as
represented in the figure. The origin of the Carte-
sian system is the robot initial position, from where
the entire process starts. Even though the location of
the doors is indicated, the robot keeps checking for
the door while approaching it, to calibrate its position
and its state (open/closed, etc.). The semantic nav-
igation framework is also used for completing other
tasks, such as localizing a person or an object.
To gain planning stage flexibility, we also devel-
oped a way-points based navigation approach. In this
way, to move the robot between two locations in the
map, we can force it to follow intermediate points not
belonging to a specific or optimal path. This is partic-
ularly useful to test motion features in specific parts
of the scenario, or to reach specific places during the
trajectory (e.g., to force the robot to pass through a
specific door). The path between intermediate points
is computed by the ROS path planner. A dictionary
data structure is used to represent way-points paths:
The keys are entity pairs (i.e., the source and the desti-
nation in the map), and the values are the list of places
reached along the path. The way-points dictionary is
stored as a json file. The way-points based navigation
is activated if the pair source-destination is present in
the dictionary.
2.4 The “Help Me Carry” Context
As a realistic scenario for door opening, we based
our study on the “Help Me Carry” task included in
Robocup 2018. To complete it, the robot has to
memorize locations, move following user commands,
avoid obstacles, and open doors. The task description
is as follows. The user went shopping, and needs the
robot’s help for bringing inside all the bags. To com-
plete the task the robot will:
1. Follow the owner to the bags.
2. Memorize the bags location.
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots
419
Wait Cmd
Track
People
Save
Location
Pick Up
Bag
Drop Bag
Door
Opening
Ask To
Open The
Door
Move To
Error
Recovery
FOLLOW_CMD
STORE
LOCATION
PICK UP
BRING BAG
TO
PICK UP
CLOSED DOOR
DETECTION
DOOR OPENED
DOOR LOCKED
DOOR OPENED
DROP BAG
MOVE TO BAGS
TASK_OK
Ask For
Human
Help
ERRO NOT
RECOVERED
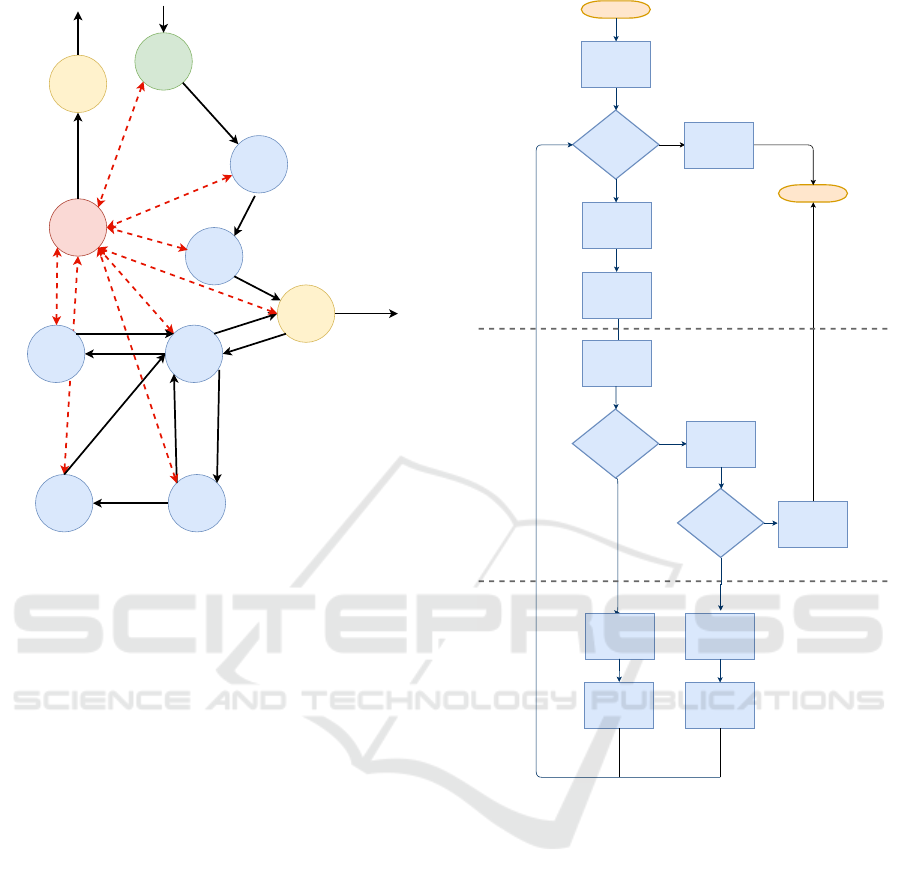
Figure 3: Automaton representing the “Help Me Carry”
task. It shows the problem of door opening in the context
of a more complex task, which involves human interaction
and navigation.
3. Understand the owner’s command to bring the
bags to a specific different location.
4. Bring all bags to that desired specified location.
The automaton designed to perform the task is
shown in Figure 3. Blue circles indicate operational
states, green ones are initial states, and yellow ones
represent ending states. The red color represents er-
ror recovery states. Black and red dashed arrows in-
dicate transitions between states and transitions be-
tween a state and the error recovery state, respectively.
The red lines are bi-directional because after the error
handling the control may be given back to the call-
ing state. The text on the arrows represent the event
causing the transition. Each state is implemented as
an automaton, hence the overall architecture is a hi-
erarchical state machine. For the sake of readability,
we did not used the often used “double border” nota-
tion to identify nested state machines. This structure
is quite flexible and it is easy to maintain.
As an example of behavior, the robot is activated
in the state named “Wait Cmd” (wait for command).
In this state the robot simply waits for commands
coming from the user. If the command for following
the user is received, the state machine transit to the
“Track People” state. Otherwise, if the command can-
not be correctly interpreted, the state machine transits
Start
No
Pulling
Succeded ?
Yes
No
Pushing
Succeeded?
Yes
Door/Handle
Detection
Move
Through
Handle
Grasping &
Unlatching
Pull Door
of 5 cm
Push Door
of 5 cm
Compute
Pushing
Trajectory
Compute
Pulling
Trajectory
Push Door
Closed
Door ?
Door
Parameters
Computation
End
Door Locked
No
Pull Door
Figure 4: The operational flowchart for door opening. It
includes the entire flow from the moment if which the robot
detects a door to the one in which it crosses the door or it
understands that the door is locked.
to the “Error Recovery” state. The general policy of
the “Error Recovery” state is that, if the error is recti-
fied, the control is given back to the incoming state. If
the error cannot be rectified, the state returns the con-
trol to a higher level state machine or directly interacts
with the user asking for help.
3 NESTING AUTOMATA
Detecting, opening and navigating through doors is a
complex problem that involves many algorithms. In
our approach, we decomposed the problem into dif-
ferent stages. The flowchart in Figure 4 describes the
algorithmic approach we followed.
ICSOFT 2019 - 14th International Conference on Software Technologies
420
Estimate
Door Width
Grasp
Handle
Unlatch
Handle
GRASP_OK
Try to Pull
Try to Push
Compute
Pushing
Traj
Door
Pulling
Door
Pushing
UNLATCHING_OK
PULL_OK
PULLING_NOK
PUSHING_OK
Door
Locked
PUSH_NOK
TRAJ_READY
TRAJ_READY
OPEN_OK
Locate
Handle
LOCATE_OK
PUSHING_OK
MOVING_OK
Error
Recovery
Move back
to door
LOCATE_NOK
MEM_OK
GRASP_NOK
UNLATCHING_NOK
PULLING_ERROR
TRAJ_ERR
PULLING_ERR
Compute
Pulling
Traj
PUSHING_ERR
TRAJ_ERR
PUSHING_ERR
DOOR_OPEN_
NOK
Store
Location
ESTIMATION_NOK
ESTIMATION_OK
MEM_NOK
Door
Opened
OPEN_OK
OPEN_NOK
Error Not
Recovered
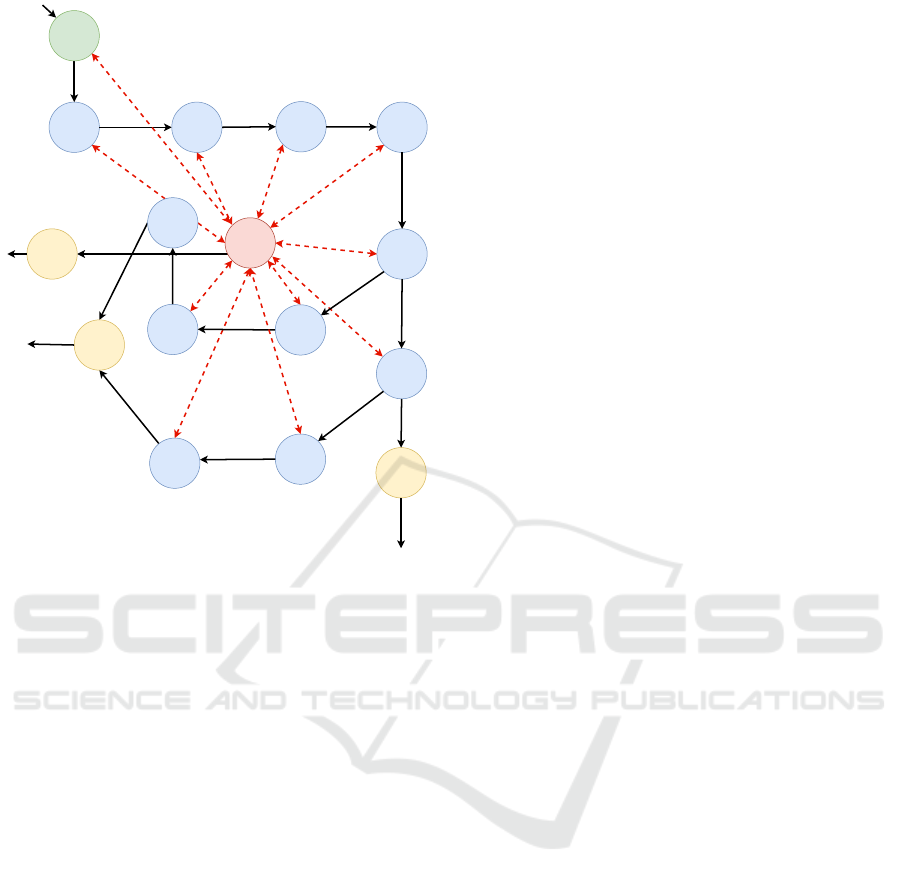
Figure 5: Our automaton for door opening. The names over
the red dashed lines indicate the type of transition between
a state and the “Error Recovery” state.
Each block involves different technologies and
techniques. The top part represents the overall
door/handle detection, and the door parameters esti-
mation. The door type (pulling or pushing) is checked
in the central part, whereas the opening phase is ex-
ecuted at the bottom part. In summary, the robot au-
tonomously recognizes the door, it localizes the han-
dle for grasping, and it decides the opening action
(i.e., pulling or pushing). To open the door, the robot
needs to know two parameters, i.e., the opening di-
rection (pushing or pulling), and the door width. Fol-
lowing many other approaches, these characteristics
could be annotated in advance in the environment de-
scription. However, we want to achieve a flexible
and completely autonomous interaction with the door.
Therefore, our robot computes the door width and the
opening direction at run-time. The automaton imple-
menting our door opening approach is shown in Fig-
ure 5. Notice that this state machine is nested in the
automaton designed for the overall “Help Me Carry”
task and previously described in Figure 3. The door
opening state machine is launched when the robot de-
tects a closed door. In the first state the current lo-
cation is memorized. The following states complete
the entire process described in the flowchart. The au-
tomaton has 3 ending states:
• “Door Opened”: Reached when the door is open.
• “Door Locked”: Reached if the door is locked.
• “Error Not Recovered”: Reached if an error that
prevents door opening occurs.
If the “Door Locked” or the “Error Not Recovered”
states are reached, the door can not be opened. This
situation is managed by the state machine working at
a higher hierarchical level (i.e., the one in Figure 3).
Our error recovery approach plays an essential role
to reach robustness and flexibility against unexpected
situations. First of all, the error is handled locally
within the state in which occurs. For the sake of us-
ability, the robot should not rely on human help for
solving minor issues. Thus, in our framework, each
state stores enough knowledge of the situation to han-
dle minor problems. Examples of minor errors are: A
wrong handle recognition in the 3D space, a grasping
failure, a wrong location spelling from the user, etc. If
local error correction is not possible, the control flow
jumps to the previous (higher) hierarchical level, in
which the error recovery state tries more drastic error
rectification procedures. Only after the system has at-
tempted all error recovery procedures, the robot will
ask for help from the human operator.
3.1 Door and Handle Detection
For the door and handle detection we use a deep learn-
ing approach. Several deep neural networks have
been proposed for object detection, and more specif-
ically for door and handle recognition. Among state-
of-the-art networks, we decided to exploit the Single
Shot MultiBox Detector (SSD) neural network (Liu
et al., 2016). Authors proved that this network outper-
forms other well know networks, like Yolo and Faster
R-CNN in terms of speed and accuracy. Moreover,
since SSD performs better on embedded systems, the
network can work correctly at run-time, and it guar-
antees a fast interaction with the environment. Com-
pared to other single shot methods, SSD provides a
much better accuracy, even with a smaller input im-
age size. The input to SSD is a monocular color im-
age, and the output is a list of bounding boxes con-
taining the detected objects in the image, namely, the
top left angle of each detected object plus its height
and width (object detection part). Each detected ob-
ject has an associated label indicating which class the
object belongs to (object recognition part).
In our version of SSD, the object recognition
part is based on the VGG16 model pre-trained on
the ILSVRC CLS-LOC data-set (Russakovsky et al.,
2015). Then, we trained the object detection part, and
fine-tuned the object recognition part, by construct-
ing our own data-set, the “MIL-door” data-set. The
“MIL-door” data-set consists of images of “doors”
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots
421

Figure 6: Sample images from the “MIL-door” data-set.
and “handles” crawled from Google Images. After
filtering the erroneous results, MIL-door contains 462
images of doors and 318 images of handles, for a to-
tal of 780 images. The height and width of the im-
ages range from 400 to 1200 pixels. For each im-
age, we manually annotated bounding boxes delimit-
ing the area corresponding to doors and handles. An-
notations are not inserted on top of the images, but
stored in a separate text file. Figure 6 shows three ex-
ample images extracted from our annotated data-set.
When training our SSD network with the MIL-
door data-set, we performed data augmentation on the
training data, namely, 90 degrees rotations and hori-
zontal flips. This increases the size of our data-set
eight times, for a total of 6240 images. Considering
that the object detection part of the original SSD was
trained with 9963 images for 20 object classes, we be-
lieve our data size is reasonable for our 2 object class
detection problem.
As training parameters, we used the following
configuration (please refer to (Liu et al., 2016) for
more details on the meaning of these parameters):
Batch size 32, maximum iterations 120, 000, learning
rate 0.001 (the original learning rate is decayed by 10
at iterations 80, 000, 100, 000 and 120, 000), weight
decay 0.0005, γ 0.1, momentum 0.9.
We used a low learning rate to assure conver-
gence during training and we selected it empirically.
We evaluated our door and handle detection with our
MIL-door data-set using a 10-fold cross-validation
setting. We consider that the door (or handle) has
been correctly detected if the intersection over union
(IoU) between the estimated bounding box and the
annotation is greater than 85%. The detection accu-
racy in this controlled setting is of 94.7% for doors,
and 86.3% for handles. However, during the evalua-
tion in a real setting, the IoU recognition accuracy was
slightly lower than using the data-set images. This
was mainly due to three factors: The large diversity
of doors that exist in the real world, the small size of
some handles, and sporadic image quality loss due to
poor lighting conditions.
Since there are cases in which the door is detected
but the handle is not, we designed an error recovery
algorithm to add robustness. When a door is detected
but the handle is not, the robot moves slightly for-
ward, backwards, and laterally to change the perspec-
tive until the recognition succeeds. If the handle is
not detected after a certain number of trials (5 in our
case), the error is passed to the above error recovery
state in the state machine hierarchy.
3.2 Door Width Computation
The door width is an important parameter to correctly
estimate the robot’s trajectory. To compute it, we
combine the door size in the image, taken from the
robot camera, and the door to robot distance com-
puted using the depth camera. Assuming that the ob-
ject width on the image is width
image
, and the detected
distance is d, we can obtain the relative size in the real
world using the following formula:
width
real [pixel]
= width
image
· d. (1)
However, Equation 1 measures the door size using the
pixels as measurement unit. To transform the com-
puted value from pixel into centimeters, we empiri-
cally calibrated our camera and we computed a con-
version factor conversion
coe f f
. The door width, ex-
pressed in length units (centimeters), is thus given by:
width
real [cm]
= d · conversion
coe f f
· width
image
. (2)
We measured the quality of our method by comparing
our estimated widths against ground truth values, on
four different types of doors. These doors differ in
terms of color, surface material, and shape. We also
varied the distance of the robot from the door from
1 m to 3 m, measures that are somehow reasonable in
a home environment. We used the root mean square
error to evaluate the error. Our results show that we
reached an average error of ± 6 cm. As observed in
our experiments, this value does not affect the door
opening noticeably.
3.3 Opening Direction
To open the door, the robot should move backward
from left to right if the hinges are on the right, and
vice-versa. Anyway recognizing the hinge position is
not robust enough, since hinges are often undefined or
barely visible. However, our handle and door detector
provides the handle location with respect to the door,
and thus, inferring the opening direction is straight-
forward. The opening direction is used to compute
the opening trajectory for both pulling and pushing
doors (see Sections 3.7 and 3.8, respectively).
ICSOFT 2019 - 14th International Conference on Software Technologies
422

3.4 Closed Door
The door detected in the door recognition phase may
be already open. To check this, we use the HSR’s
RGB-D sensor, the Xtion PRO LIVE. First, we obtain
the depth image corresponding to the frame where the
door has been located. Then, we take two horizontal
rows (e.g., one in the lower half and one in the up-
per). Finally, we compute the Sobel derivative along
the horizontal direction of these lines, and we check
if it contains values above a certain threshold t. This
allows our method to detect if there are edges where
the depth suddenly increases, which translates into the
door being open.
We experimentally established that the door can
be considered open if the log
10
of the derivatives ex-
ceed a threshold t = 3.5.
3.5 Handle Grasping and Unlatching
Once the door opening direction has been established,
and the distance from the door d evaluated, the robot
can approach the handle enough to get a more precise
measure of its location with the depth sensor. If some
error occurs while evaluating the handle position, we
retrieve a new depth measurement from the sensor to
get the right location. The robot, with its grip open,
gets in front of the door, and when it reaches the han-
dle location, the grip closes and the robot grasps the
handle. To unlatch the handle, we combine the robot
hand rotation with a downward movement. We ro-
tate the hand 20 degrees, and we move it downwards
10 cm. We empirically found that HSR does not have
a strong grip and a rotation plus a downward move-
ment can improve the pressure that the hand can apply
to the handle. This allows a robust unlatching even if
the handle is not grasped perfectly at its end, or the
surface of the handle is slippery (e.g., metallic).
3.6 Door Type Checking
Before computing the opening trajectory the robot has
to understand the door type, i.e., whether the door is
a pulling or a pushing door. To discriminate between
the two categories, after the grasping and the unlatch-
ing, the robot tries to move backwards and forward
to test the opening type. First, it attempts to pull the
door back 5 cm while monitoring the force acting on
the wrist torque sensor. The measure of 5 cm has been
heuristically selected as a good compromise among
several requirements. If during this movement, the
torque on the wrist sensor grows continuously, the
door cannot be pulled. In this case, the HSR attempts
to push the door by moving forward and it checks the
(a) (b) (c)
(d) (e) (f)
Figure 7: A visual example of our door opening approach.
The HSR (a) grasps the handle and (b) unlatches it, then (c)
tries to move back for 5 cm to pull the door. If the door
cannot be pulled, the robot (d) moves the handle back to
its neutral position, and (e) the door is opened by moving
backwards and drawing an angle with respect to the door
closing position. During the entire process (Figure (f)) the
door-to-robot distance is maintained constant.
force acting on the wrist sensor as before. In case
the torque force does not increase in one of these two
attempts, the robots start the opening phase (see Sec-
tions 3.7 and 3.8). On the other hand, if the door can-
not be pulled or pushed, the robot assumes that the
door is locked. The “Error Recovery” state handles
this case by calling for human help.
We also considered other approaches for testing
the door type. One of those involves monitoring
movement of the robot’s base while performing the
test. This approach did not succeed mainly because,
to measure a significant movement of the base, we
have to move the robot more than 5 cm. This in
turn can damage both the robot and the door (e.g., by
pulling a pushing door too hard). Another approach
implies the classification of the door type using a
computer vision approach. However, this solution
depends largely on the size of the training data-set,
which should contain a wide variety of doors and an-
notations indicating their type. Unfortunately, many
available images are not annotated, and manually cre-
ate a large data-set is very time consuming.
Notice that all checks performed by our approach
are done to assure robustness and to minimize the
number of errors. We emphasize the importance of
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots
423

Handle Releasing
Trajectory Estimation
Trajectory Following
Handle Releasing
Move Back to Door
(a)
Handle Releasing
Face the Door
Arm Extending
Door Pushing
Arm to Neutral Pose
(b)
Figure 8: Schematic code flow for: (a) opening a pulling
door, and (b) opening a pushing door. The code flows are
encoded as SMACH state machines, and they are fully inte-
grated in our software framework.
robustness in such a complicated scenario, since an
error in door type recognition could lead to hard-to-
manage situations or risks for the robot or the handle
and the door integrity.
3.7 Door Pulling
Figure 7 shows the entire flow for opening a pulling
door, from the moment the robot must grasp the han-
dle to the one in which the door is open. Figure 8a
shows the corresponding code flow.
When the robot stands in front of the door, and
before starting the door pulling phase, the application
stores the current robot position. These coordinates
will be used when the door is open, as the robot will
move back to the stored position to pass through the
door. The first three images (Figure 7a, 7b and 7c)
are part of the door type understanding process de-
scribed in Section 3.6. In the latter phase, the robots
moves backward 5 cm to check whether the door is a
pulling one. In the affirmative case, the robot moves
the handle back to its neutral position. A visual repre-
sentation is given in Figure 7d. This action emulates
typical human behavior, and it effectively reduces the
load on the robot wrist that does not need to hold the
handle down. At this point, the robot computes the
pulling trajectory as shown in the second block of Fig-
ure 8a. The final trajectory is an arc-shaped sequence
of map coordinates that form an angle of 80 degrees
with respect to the door hinges. In this way, the door
is opened wide enough for the robot to pass through
it.
Because the HSR’s arm has less than six degrees-
of-freedom (DoF), we have to move the base and the
arm together, keeping the robot hand in a fixed po-
sition. As a consequence, the door-to-robot distance
remains constant. In this way, we do not need to con-
tinuously check for collision between the robot and
the door. This situation is shown in Figure 7e. Once
the robot completes the trajectory, it releases the han-
dle, and it moves back in front of the door to continue
the navigation toward the final goal. The robot posi-
tion saved in the first state is used as a target position
to cross the door.
3.8 Door Pushing
Following Figure 4, if the robot detects that the door
cannot be pulled, it checks whether it can be pushed,
and, in this latter case, the pushing process starts. The
pushing door action flow is detailed in Figure 8b. As
in the pulling door case, our robot attempts to push
the door to check the opening type. After the han-
dle releasing phase, the robot moves in front of the
door at a fixed distance of 50 cm. Once this position
is reached, the robot first extends its arm to reach the
door, which is already open a few centimeters after
pushing it to check its type. As the robot is going to
move forward, reaching the door is not strictly nec-
essary. At the same time, we also monitor the wrist
sensor to assure that no unexpected collision occurs.
During the pushing phase, the HSR moves forward,
and when the phase finishes, the robot is on the other
side of the door. The last action executed by the robot
before restarting the normal navigation, is to retract
its arm into its original and safer position.
To succeed in the pushing action, the handle posi-
tion is an important parameter. When unlatching the
handle, the robot faces it, but during the pushing ac-
tion, some collisions may occur. Since HSR is a left-
handed robot, the most unfavorable scenario is when
the handle is on the right side. A schematic top-view
of this situation is given in Figure 9. While pushing
the door, a collision check is performed in the robot
base to prevent HSR from hitting the door frame. If
a potential collision situation is detected, the robot is
moved slightly to the left with respect to the handle.
If a collision is detected, the “Error Recovery” state
stops the robot and moves it back to the beginning
of the pushing stage. These strategies were validated
empirically, and allowed for a safe and robust naviga-
tion through doors, as described in the next section.
4 EXPERIMENTAL ANALYSIS
We evaluated our unified framework by means of two
set of experiments. These experiments were designed
to verify two main aspects: 1) Our framework’s ro-
ICSOFT 2019 - 14th International Conference on Software Technologies
424

(a) (b)
Figure 9: Passing through a pushing door: (a) HSR may
suffer a collision when opening a pushing door with a right
side handle. (b) To avoid hitting the door frame, the sensor
on the robot base is activated. If HSR detects a possible
collision, its position is slightly shifted to the left.
bustness in a real navigation scenario, and 2) The
quality of the entire door opening process with dif-
ferent doors, handles, materials, etc.
First, we evaluated the door opening process in
a realistic navigation scenario by using a simplified
version of the “Help Me Carry” task previously de-
scribed. In this task, the user instructs the robot to
fetch an object in a specific location in a different
room, and he awaits for the robot to return. We also
imposed way-points during navigation, i.e., we force
the robot to follow a different path on the way back.
To run this scenario, we arranged a house environ-
ment similar to the one in Figure 2. Initially, the HSR
robot is in a location within room R1. The robot is
supposed to reach room R4 by passing through doors
D1, D2, and D4. Then, it should go back to the initial
position by passing through doors D3 and D1. The
doors in this task have different characteristics. When
moving from R1 to R2, door D1 is a pushing door
with the handle on the left. Door D2 is open. when
moving from R5 to R4, and door D4 is a pulling door
with its handle on the left. On the way back, when
moving from R4 to R2, door D3 is a pulling door with
its handle on the left. Finally, when the robot moves
back from R2 to R1, D1 is still open. The robot de-
tected the doors during navigation, following a route
determined by the ROS path planner. Since the ex-
periment does not involve any obstacles, we did not
employed the way-points navigation approach. No-
tice that the door type and handle position affects the
door opening process in terms of the selected trajec-
tories and the final success rate. In order to show the
robustness of our framework, the door and handle at-
tributes are unknown by the robot.
We commanded the robot to execute the task 50
times. In all cases, the robot reached R4 without nav-
igation errors, and it successfully detected and dis-
criminated between closed and opened doors. The
accuracy of the door and the handle detection in the
real scenario does not vary significantly with respect
to the detection accuracy reported for our MIL-door
data-set. Whenever a handle was not initially recog-
nized, the error recovery procedure forced the robot
to move slightly forward, backwards, and laterally to
change the perspective until the recognition was suc-
cessful. This procedure provided a recognition suc-
cess rate up to 95%. In the remaining 5%, the er-
ror persisted so the higher hierarchical automata level
dealt with it. Moreover, even if initially the location
of the detected handle was not aligned perfectly, the
location was refined when approaching the handle and
using depth images. Regarding the handle grasping,
every time the HSR could not hold the grip on a han-
dle, the error recovery procedure reactivated the de-
tection phase and the “door opening” phase restarted
from the beginning.
In light of these results, we designed a second ex-
periment with an emphasis on the handle grasping
sub-task. In this experiment, the HSR had to deal
with a variety of doors and handles, which differ in
terms of door type (pushing or pulling), handle po-
sition (left or right), and material (slippery or non-
slippery). We commanded the robot to move from
room R1 to room R2 while modifying the configu-
ration of D1. The robot starts in front of the door
ready to grasp the handle, and it stops after the door is
open (passing through is not required). As above, the
robot does not know the door and handle attributes.
We conducted 20 runs for each door and handle con-
figuration. Notice that the door type influences the
robot trajectory, whereas the handle material influ-
ences the quality of the handle grasp and its hold-
ing process. Moreover, some metallic handles may
cause noise in the depth image due to reflections. We
separate the door opening results for slippery handles
(metallic), and non-slippery handles (wood or plastic-
like material), and their location with respect to the
door (i.e., left or right). Similarly, we also consider
spring loaded doors, that is, doors that close by them-
selves after they are open. We do not evaluate open-
ing pushing spring loaded doors since, once the robot
arm releases the handle after the unlatching, the door
closes again before the HSR has the chance to push it.
Table 1 summarizes the results for this second ex-
periment. The handle localization using depth im-
ages proved to be robust with different handle shapes
and materials. After the handle grasping, our ap-
proach recognized in 100% of the cases the door type,
i.e., whether the HSR had to pull or push the door.
As the HSR grip did not have enough strength to
hold slippery handles (in particular, those in spring
loaded doors) the door opening did not always suc-
ceed. However, when an error arose, the robot was
able to retry the task by itself by following the error
recovery procedure previously described. The robot
asked for human help only in a total of 3 occasions.
This results are very promising for a practical appli-
cation, as the recovery procedure is able to rectify
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots
425

errors in most cases. However, for the sake of fair-
ness, Table 1 considers runs as failed whenever an er-
ror arose, even if the robot recovered from the error
autonomously. Overall, we reached a 98% of success
rate for non-slippery handles, and 94% for slippery
metal-like handles. Notice that these results are influ-
enced not only by the robot’s grasping ability, but also
by the handle detection under different types of light
reflection on the handle surface. Regarding pulling
spring loaded doors, holding the handle when open-
ing was quite challenging for the robot, specially in
the case of slippery handles. This is due to the limited
strength of the HSR’s grip. Moreover, handles on the
right side of pushing doors are more challenging due
to the reasons explained in Section 3.8.
Table 1: Results of our door opening approach. The ta-
ble presents the number of successes out of 20 opening at-
tempts, with 4 different handle types. T
1
: Slippery handle
on the door left side. T
2
: Slippery handle on the door right
side. T
3
: Non-slippery handle on the door left side. T
4
:
Non-slippery handle on the door right side.
Action Type
Handle Type
T
1
T
2
T
3
T
4
Pulling non-spring loaded door 16 18 18 19
Pulling spring loaded door 16 18 19 19
Pushing non-spring loaded door 20 18 20 17
5 CONCLUSIONS
In this paper we presented a unified framework for ap-
proaching, opening, and navigating through doors. To
the best of our knowledge, this is the first attempt to
solving the door opening problem in a navigation sce-
nario. Our unified framework integrates an automata
model and its state machine hierarchy. This includes
techniques for error recovery, allowing for a robust
door opening and its implementation in an operational
system. We implemented our framework on a Toyota
HSR, which is a standard platform and, thus, it facil-
itates the reproducibility of our work. For door and
handle detection, we proposed a deep learning-based
method trained with our image dataset. For handle
grasping, door type checking, unlatching and open-
ing, we propose optimized techniques for HSR, but
extrapolable to similar off-the-shelf platforms. From
the software engineering point of view, this paper
covers the design, analysis and synthesis of such a
robotic system for real-world operation. We evaluated
our framework for navigation and door-opening ap-
proach in a challenging realistic scenario inspired by
Robocup 2018 tasks. We tested our platform against
different types of doors, and with different types of
handles and opening directions. Our results show the
robustness and flexibility of our approach and its high
applicability by using a standard service robot. On the
other hand, robots lacking some of the HSR features
(e.g., a depth camera, a base sensor, a wrist torque
sensor) may not be able to implement our framework
without previously adapting the algorithms.
As future work, we plan to attempt recognizing
and opening a wider variety of doors. We will also ex-
tend our framework for recognizing and moving ob-
stacles during navigation. We believe this can fur-
ther improve the robustness and the flexibility of our
framework against changes in the environment.
ACKNOWLEDGMENTS
We would like to thank Yusuke Kurose, Yujin Tang,
Jen-Yen Chang, James Borg, Takayoshi Takayanagi,
Yingy Wen and Reza Motallebi for their help imple-
menting this research. This work was partially sup-
ported by JST CREST Grant Number JPMJCR1403,
Japan. The authors have been part of the HSR devel-
oper community
10
, and they made use of HSR hard-
ware and software platforms.
REFERENCES
Andreopoulos, J. A. and Tsotsos, J. K. (2007). A frame-
work for door localization and door opening using a
robotic wheelchair for people living with mobility im-
pairments. In Robotics: Science and systems, Work-
shop: Robot manipulation: Sensing and adapting to
the real world, Atlanta.
Aude, E. P., Lopes, E. P., Aguiar, C. S., and Martins,
M. F. (2006). Door crossing and state identifica-
tion using robotic vision. IFAC Proceedings Volumes,
39(15):659 – 664.
Burgard, W., Cremers, A. B., Fox, D., H
¨
ahnel, D., Lake-
meyer, G., Schulz, D., Steiner, W., and Thrun, S.
(1998). The interactive museum tour-guide robot. In
Proc. Conference on Artificial Intelligence/Innovative
Applications of Artificial Intelligence, pages 11–18.
Chitta, S., Cohen, B., and Likhachev, M. (2010). Planning
for autonomous door opening with a mobile manip-
ulator. In International Conference on Robotics and
Automation, pages 1799–1806.
Dongwon, K., Ju-Hyun, K., Chang-Soon, H., and Gwi-Tae,
P. (2004). Mobile robot for door opening in a house.
In Knowledge-Based Intelligent Information and En-
gineering Systems, pages 596–602.
Fern
´
andez-Caram
´
es, C., Moreno, V., Curto, B., Rodr
´
ıguez-
Arag
´
on, J. F., and Serrano, F. (2014). A real-time
door detection system for domestic robotic navigation.
10
https://newsroom.toyota.co.jp/jp/detail/8709536
ICSOFT 2019 - 14th International Conference on Software Technologies
426

Journal of Intelligent & Robotic Systems, 76(1):119–
136.
Gray, S., Chitta, S., Kumar, V., and Likhachev, M. (2013).
A single planner for a composite task of approach-
ing, opening and navigating through non-spring and
spring-loaded doors. In Proc. IEEE International
Conference on Robotics and Automation, pages 3839–
3846.
Hernandez, K., Bacca, B., and Posso, B. (2017). Multi-goal
path planning autonomous system for picking up and
delivery tasks in mobile robotics. IEEE Latin America
Transactions, 15(2):232–238.
Jain, A. and Kemp, C. C. (2008). Behaviors for robust door
opening and doorway traversal with a force-sensing
mobile manipulator. In RSS Workshop on Robot Ma-
nipulation: Intelligence in Human Environments.
Johnson, M., Shrewsbury, B., Bertrand, S., Wu, T., Du-
ran, D., Floyd, M., Abeles, P., Stephen, D., Mertins,
N., Lesman, A., Carff, J., Rifenburgh, W., Kaveti, P.,
Straatman, W., Smith, J., Griffioen, M., Layton, B.,
Boer, T., Koolen, T., Neuhaus, P., and Pratt, J. (2015).
Team ihmc’s lessons learned from the darpa robotics
challenge trials. J. Field Robot., 32(2):192–208.
Khatib, O. (1999). Mobile manipulation: The robotic assis-
tant. Robotics and Autonomous Systems, 26(2):175 –
183.
Kim, G., Chung, W., Kim, K.-R., Kim, M., Han, S., and
Shinn, R. (2004). The autonomous tour-guide robot
jinny. In IEEE/RSJ International Conference on In-
telligent Robots and Systems (IROS), volume 4, pages
3450–3455.
Kim, S., Cheong, H., Kim, D. H., and Park, S. (2011).
Context-based object recognition for door detec-
tion. In 15th International Conference on Advanced
Robotics (ICAR), pages 155–160.
Klingbeil, E., Saxena, A., and Ng, A. Y. (2010). Learning
to open new doors. In IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems, pages 2751–
2757.
Kohlbrecher, S., von Stryk, O., Meyer, J., and Klingauf, U.
(2011). A flexible and scalable slam system with full
3d motion estimation. In IEEE International Sympo-
sium on Safety, Security, and Rescue Robotics, pages
155–160.
Krotkov, E., Hackett, D., Jackel, L., Perschbacher, M., Pip-
pine, J., Strauss, J., Pratt, G., and Orlowski, C. (2017).
The darpa robotics challenge finals: Results and per-
spectives. J. Field Robot., 34(2):229–240.
Lim, J., Bae, H., Oh, J., Lee, I., Shim, I., Jung, H., Joe,
H.-M., Sim, O., Jung, T., Shin, S., Joo, K., Kim, M.,
Lee, K., Bok, Y., Choi, D.-G., Cho, B., Kim, S., Heo,
J., Kim, I., and Oh, J.-H. (2018). Robot system of
DRC-HUBO+ and control strategy of team KAIST in
DARPA robotics challenge finals, pages 27–69.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37.
Meeussen, W., Wise, M., Glaser, S., Chitta, S., McGann, C.,
Mihelich, P., Marder-Eppstein, E., Muja, M., Eruhi-
mov, V., Foote, T., Hsu, J. M., Rusu, R. B., Marthi,
B., Bradski, G. R., Konolige, K., Gerkey, B. P., and
Berger, E. (2010). Autonomous door opening and
plugging in with a personal robot. In IEEE Interna-
tional Conference on Robotics and Automation, pages
729–736.
Ott, C., B
¨
auml, B., Borst, C., and Hirzinger, G. (2007).
Autonomous opening of a door with a mobile ma-
nipulator: A case study. IFAC Proceedings Volumes,
40(15):349–354.
Peterson, L., Austin, D., and Kragic, D. (2000). High-
level control of a mobile manipulator for door open-
ing. In Proceedings. IEEE/RSJ International Con-
ference on Intelligent Robots and Systems, volume 3,
pages 2333–2338.
Petrovskaya, A. and Ng, A. Y. (2007). Probabilistic mo-
bile manipulation in dynamic environments, with ap-
plication to opening doors. In Proceedings of the
20th International Joint Conference on Artifical Intel-
ligence, IJCAI’07, pages 2178–2184, San Francisco,
CA, USA. Morgan Kaufmann Publishers Inc.
Rhee, C., Chung, W., Kim, M., Shim, Y., and Lee, H.
(2004). Door opening control using the multi-fingered
robotic hand for the indoor service robot. In Proc.
IEEE International Conference on Robotics and Au-
tomation, volume 4, pages 4011–4016.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
genet large scale visual recognition challenge. Int. J.
Comput. Vision, 115(3):211–252.
Rusu, R. B., Meeussen, W., Chitta, S., and Beetz, M.
(2009). Laser-based perception for door and handle
identification. In 2009 International Conference on
Advanced Robotics, pages 1–8.
Shalaby, M. M., Salem, M. A., Khamis, A., and Melgani,
F. (2014). Geometric model for vision-based door de-
tection. In 9th International Conference on Computer
Engineering Systems, pages 41–46.
Thrun, S., Bennewitz, M., Burgard, W., Cremers, A. B.,
Dellaert, F., Fox, D., Hahnel, D., Rosenberg, C., Roy,
N., Schulte, J., and Schulz, D. (1999). Minerva: a
second-generation museum tour-guide robot. In Proc.
IEEE International Conference on Robotics and Au-
tomation, volume 3, pages 1999–2005.
Detecting, Opening and Navigating through Doors: A Unified Framework for Human Service Robots
427
