
Moving-object Tracking with Lidar Mounted on
Two-wheeled Vehicle
Shotaro Muro
1
, Yohei Matsui
1
, Masafumi Hashimoto
2a
and Kazuhiko Takahashi
2
1
Graduate School of Doshisha University, Kyotanabe, Kyoto 6100321, Japan
2
Faculty of Science and Engineering, Doshisha University, Kyotanabe, Kyoto 6100321, Japan
Keywords: Moving-object Tracking, Lidar, Two-wheeled Vehicle, Distortion Correction, Map Subtraction.
Abstract: This paper presents a tracking (estimating position, velocity and size) of moving objects, such as cars, two-
wheeled vehicles, and pedestrians, using a multilayer lidar mounted on a two-wheeled vehicle. The vehicle
obtains its own pose (position and attitude angle) by on-board global navigation satellite system/inertial
navigation system (GNSS/INS) unit and corrects the distortion in the lidar-scan data by interpolating the pose
information. The corrected lidar-scan data is mapped onto 3D voxel map represented in the world coordinate
frame. Subsequently, the vehicle extracts the interested lidar-scan data from the current lidar-scan data using
the normal distributions transform (NDT) scan matching based map-subtraction method. The extracted scan
data are mapped onto an elevation map, and moving objects are detected based on an occupancy grid method.
Finally, detected moving objects are tracked based on the Bayesian Filter. Experimental results show the
performance of the proposed method.
1 INTRODUCTION
In mobile robotics and vehicle automation domains,
tracking (estimation of position, velocity, and size) of
moving objects, such as cars, two-wheeled vehicles,
and pedestrians, is an important technology to
achieve the advanced driver assistant system (ADAS)
and autonomous driving. A lot of studies of moving-
object tracking using cameras, lidars, and radars have
been actively conducted (Mukhtar et al., 2015, Mertz
et al., 2013).
When compared with vision-based tracking, lidar-
based tracking is robust to lighting conditions and
require less computational time. Furthermore, lidar-
based tracking provides tracking accuracy better than
radar-based tracking due to higher spatial resolution
of lidar. From these reasons, we have presented a
lidar-based tracking of moving objects (Hashimoto et
al., 2006, Tamura et al., 2017).
Most methods of moving-object tracking have
been applied to ADAS and autonomous driving for
four-wheeled vehicles traveling on flat road surfaces.
Although moving-object tracking is required for
advanced rider assist systems (ARAS) for two-
wheeled vehicle, there are few studies on moving-
a
https://orcid.org/0000-0003-2274-2366
object tracking with sensors mounted on two-wheeled
vehicles (Amodio et al., 2017, Barmpounakis et al.,
2016, Jeon and Rajamani, 2018).
In this paper, we present a method of moving-
object tracking using a lidar mounted on a two-
wheeled vehicle. Moving-object tracking by a two-
wheeled vehicle is more difficult than that by a four-
wheeled vehicle, because the attitude of a two-
wheeled vehicle changes more drastically than that of
a four-wheeled vehicle, and the sensing accuracy then
deteriorates.
The occupancy grid method (Thrun et al., 2005),
in which the grid map is represented in the world
coordinate frame, is usually applied to moving-object
detection and tracking. In order to perform accurate
moving-object detection, it is necessary to accurately
map a lidar-scan data obtained in the sensor
coordinate frame onto a grid map using a vehicle's
pose (position and attitude angle). Since the lidar
obtains data by the laser scanning, all scan data within
one scan cannot be obtained at the same time when
the vehicle is moving or changing its own attitude.
Therefore, if all scan data within one scan are mapped
onto the world coordinate frame using the vehicle's
Muro, S., Matsui, Y., Hashimoto, M. and Takahashi, K.
Moving-object Tracking with Lidar Mounted on Two-wheeled Vehicle.
DOI: 10.5220/0007948304530459
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 453-459
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
453

pose at the same time, distortion in the lidar-scan data
occurs (Inui et al., 2017).
In addition, when the lidar is mounted on a two-
wheeled vehicle, the mapping accuracy deteriorates
due to the large swing motion of the lidar. As a result,
undetection and false detection of moving objects
increase. In order to address this problem, in this
paper, we estimate the vehicle’s pose every shorter
period than lidar-scan period, and then using the pose
estimates, we correct the distortion in lidar-scan data.
Furthermore, the differences (subtracted scan
data) are extracted between the 3D-point cloud
environment map acquired in advance and the current
lidar-scan data, and only the subtracted scan data is
mapped onto the grid map. Thereafter, moving-object
detection and tracking are performed by the
occupancy grid method and Baysian filter.
The rest of this paper is organized as follows. In
Section 2, an overview of the experimental system is
given. In Section 3, the methods of distortion
correction and map subtraction are described. In
Section 4, method of detecting and tracking moving
objects is described. In Section 5, experimental
results are presented, followed by conclusions in
Section 6.
2 EXPERIMENTAL SYSTEM
Figure 1 shows the overview of two-wheeled vehicle.
As a first step of the study, we use a bicycle (Yamaha
PAS-GEAR-U) as a two-wheeled vehicle. On the
upper part of the bicycle, a 32-layer lidar (Velodyne
HDL-32E) is mounted, and a global navigation
satellite system/inertial navigation system (GNSS/
INS) unit (Novatel PwrPak7-E1) is mounted on the
rear part.
The maximum range of the lidar is 70 m, the
horizontal viewing angle is 360° with a resolution of
0.16°, and the vertical viewing angle is 41.34° with a
resolution of 1.33°. The lidar acquires 384
measurements including the object’s position every
0.55 ms (at 2° horizontal angle increments). The
period for the lidar beam to complete one rotation
(360°) in the horizontal direction is 100 ms, and about
70,000 measurements are acquired in one rotation. In
this paper, one rotation in the horizontal direction of
the lidar beam is referred to as one scan, and the data
including measurements acquired by the one scan is
referred to as the lidar-scan data.
The GNSS/INS unit outputs the 3D position and
attitude angle (roll, pitch and yaw angles) every 100
ms. The horizontal and vertical position errors (RMS)
are 0.02 m and 0.03 m, respectively. The roll and
pitch angle errors (RMS) are 0.02°, and the yaw angle
error (RMS) is 0.06°.
Figure 1: Experimental bicycle.
3 SUBTRACTION OF SCAN
DATA
3.1 Distortion Correction
The lidar-scan data are obtained in the sensor
coordinate frame Σ
S
fixed on the lidar, and they are
mapped on the world coordinate frame Σ
W
using the
bicycle’s pose. The output of the GNSS/INS unit can
be used as the bicycle’s pose in GNSS environments.
The observation period of the GNSS/INS unit is
100 ms at which the lidar makes one rotation, and
scan data every 0.55 ms are captured 180 times within
one rotation of the lidar. Therefore, the bicycle's pose
is estimated every 0.55 ms by interpolating the
bicycle's pose from the GNSS/INS unit every 100 ms.
For the i-th (i = 1, 2, ...) measurement in the scan
data, we define the position vector in Σ
S
as p
i
= (x
i
,
y
i
, z
i
)
T
and that in Σ
W
as p
i
'
= (x
i
'
,y
i
'
,z
i
'
)
T
. p
i
can be
converted to p
i
'
by
1
)(
1
'
ii
p
X
p
(1)
where
T
zyx ),,,,,(
X
is the bicycle’s pose.
(x, y, z)
T
and
T
),,(
are the position and attitude
angle (roll, pitch, and yaw angles) of the bicycle,
respectively, in
Σ
W
. T(X) is the following
homogeneous transformation matrix:
cos cos sin sin cos cos sin cos sin cos sin sin
cos sin sin sin sin cos cos cos sin sin sin cos
()
sin sin cos cos cos
00 01
x
y
Τ
z
X
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
454

3.2 Extraction of Scan Data Related to
Object
After correcting the distortion in the lidar-scan data,
scan data related to road planes are removed and those
related to objects are extracted to detect moving
objects.
As shown in Fig. 2, we consider 32 measurements
captured every horizontal resolution (about 0.16°) of
the lidar. We assume that the measurement
r
1
, which
is the closest measurement to the bicycle, is the
measurement related to road planes. We obtain the
angle of a line connecting the adjacent measurements
r
1
and r
2
relative to the XY plane in
Σ
W
. If it is less
than 15°, the measurement
r
2
is determined to belong
to the road planes. If the angle is larger than 15°, the
measurement
r
2
is determined to belong to the object.
By repeating this process for all the lidar-scan data,
we can find the scan data related to objects and apply
them to detect moving objects.
3.3 Scan-data Subtraction
We assume that the bicycle has an environment map
(3D point-cloud map related to static objects) in
advance. As shown in Fig. 3, current scan data are
compared with the environment map, and the scan
data that subtract background from current scan data
are extracted.
Since the environmental map and the current scan
data contain a lot of scan data, it takes much
computational cost for the scan-data subtraction.
Therefore, as shown in Fig. 4, to reduce the
computational cost, we apply a voxel grid filter
(Munaro et al., 2012); scan data related to the
environment map and current scan data are
downsized by the voxel grid filter. Thereafter, scan
data are mapped onto the 3D grid map (voxel map).
Here, the voxel used for the voxel grid filter is a cube
with a side-length of 0.2 m, whereas the voxel for the
voxel map is a cube with a side-length of 0.5 m.
Next, the current scan data are matched with the
environment map using the normal distributions
transform (NDT) scan matching (Biber and Strasser,
2003). The NDT scan matching conducts a normal
distribution transformation for the scan data in each
voxel of the environmental map; it calculates the
mean
q
i
and covariance Ω
i
of 3D positions of the scan
data. Then, the likelihood function
of the current
scan data
P’(t) ={p
1
'
(t), p
2
'
(t), ..., p
n
'
(t)}
is calculated by
n
i
iii
T
ii
tt
1
1
))('())('(
2
1
exp qpΩqp
(2)
Figure 2: Extraction of lidar-scan data related to objects.
Red and blue points indicate the scan data related to the road
planes and objects, respectively.
Figure 3: Map-subtraction method.
Figure 4: Mapping sequence of lidar-scan data.
Then, the bicycle’s pose X that maximizes Λ is
calculated, and the coordinates of the current scan
data in
Σ
W
is calculated by Eq. (1). The scan-data
subtraction is performed by comparing the
environmental map with the current scan data. In this
study, we use the point cloud library (PCL) (Rusu and
Cousins, 2011) for the NDT scan matching.
Moving-object Tracking with Lidar Mounted on Two-wheeled Vehicle
455

4 MOVING-OBJECT
DETECTION AND TRACKING
We apply an elevation map to detect moving objects
at small computational cost; the subtracted scan data
are mapped onto the elevation map. In this study, the
cell of the elevation map is a square with a side-length
of 0.3 m.
A cell in which scan data exist is referred to as an
occupied cell. For scan data related to moving
objects, the time to occupy the same cell is short,
whereas for scan data related to static objects, the
time is long. Therefore, by using the occupancy grid
method based on the cell occupancy time (Hashimoto
et al., 2006), we classify two kinds of cells: moving
and static cells. The moving cell is occupied by the
scan data related to moving objects, and the static cell
by the scan data related to static objects.
Since scan data related to an object usually
occupies more than one cell, adjacent occupied cells
are clustered. Then, clustered moving cells (moving-
cell group) and clustered static cells (static-cell
group) are obtained.
When moving-object detection is completed,
moving-object tracking (estimating position,
velocity, and size) is performed. In this paper, the
shape of the tracking object is represented by a cuboid
with a width W, a length L, and a height H as shown
in Fig. 5. As shown in Fig. 6, we define an X
v
Y
v
-
coordinate frame, on which the Y
v
-axis aligns with the
heading of a tracked object. From moving-cell group,
we extract the width W
meas
and length L
meas
.
When a moving object is perfectly visible, its size
can be estimated from these moving-cell groups. In
contrast, when it is partially occluded by other objects,
its size cannot be accurately estimated. Therefore, the
size of a partially visible object is estimated using the
following equation (Tamura et al., 2017):
() (1) ( (1))
() (1) ( (1))
meas
meas
Wt Wt GW Wt
Lt Lt GL Lt
(3)
where t and t-1 are time steps. G is the filter gain.
The height of the moving-cell group uses as the
height estimate H.
We then define the centroid position of the
rectangle estimated from Eq. (3) by
),( yx in Σ
W
.
From the centroid position, the pose of the tracked
object in Σ
W
is estimated using the Kalman filter
under the assumption that the object is moving at an
almost constant velocity (Tamura et al., 2017).
To track objects in crowded environments, we
need data association (i.e., one-to-one or one-to-many
Figure 5: Cuboid around the tracked object (car).
Figure 6: Observed vehicle size. Red squares and green
arrow indicate moving cells and vehicle heading direction,
respectively. Blue rectangle and circle indicate observed
size and centroid, respectively.
matching of tracked objects and moving-cell groups).
We exploit the global-nearest-neighbour (GNN)
based and rule-based data association to accurately
perform data association (Tamura et al., 2017).
The number of moving objects in the sensing
areas of the lidar changes over time. Moving objects
enter and exit the sensing area of the lidar. They also
interact with and become occluded by other objects in
environments. To handle such conditions, we
implement a rule-based data handling method
including track initiation and termination (Hashimoto
et al., 2006).
5 EXPERIMENTAL RESULTS
We conducted experiments in our university campus
as shown in Fig. 7. The maximum speed of the bicycle
is 15 km/h. Figure 8 shows the roll and pitch angles
of the bicycle. To change the attitude of the lidar
largely, we rode the bicycle in zigzag.
Figure 7: Photo of experimental environment (bird-eye
view). Red line indicates moved path of the bicycle.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
456
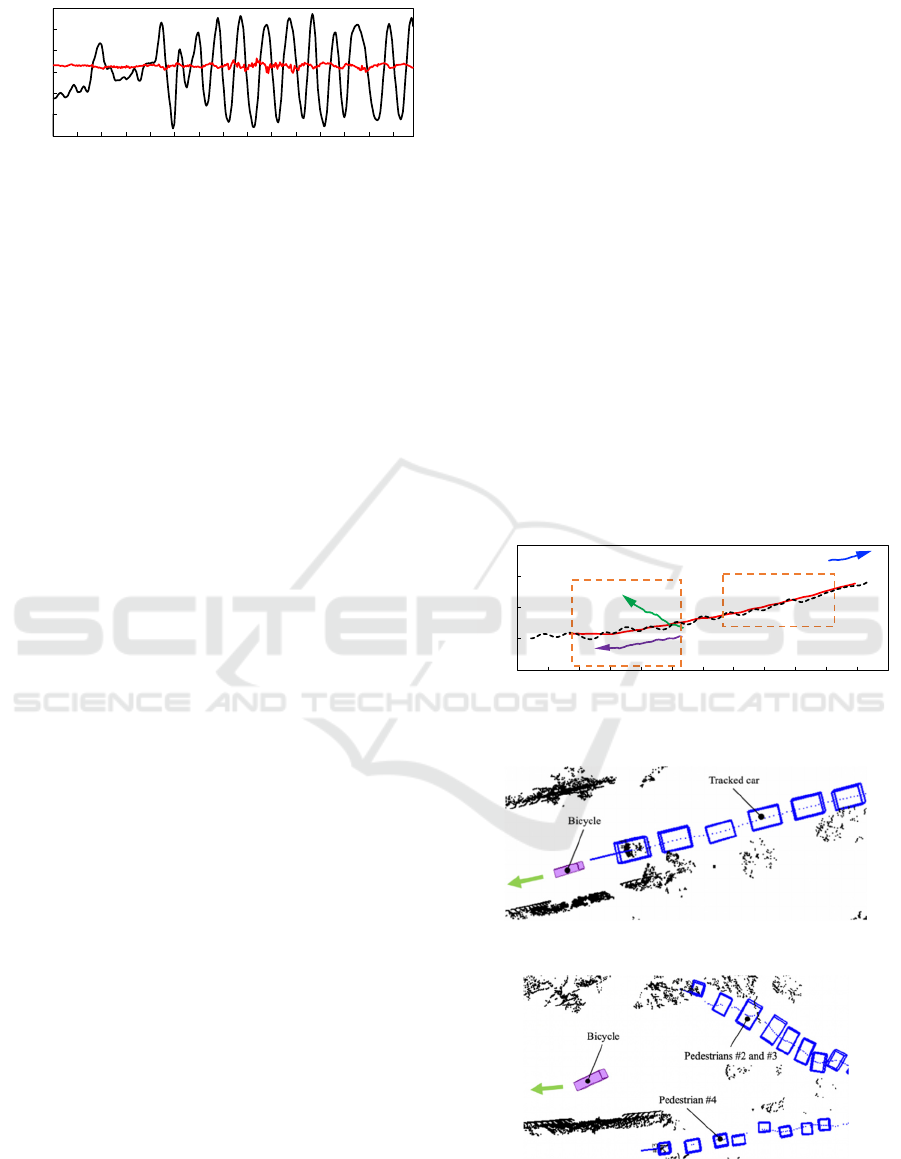
Figure 8: Attitude angles of bicycle. Black and red lines
indicate the roll and pitch angles, respectively.
To confirm the performance of moving-object
tracking by the bicycle, a four-wheeled vehicle (a car)
followed the bicycle. The car is equipped with a
GNSS/INS unit, which performance is the same as
that mounted on the bicycle.
Figure 9 (a) shows the tracks of four pedestrians
and a car estimated by the bicycle’s lidar. Figure 9 (b)
shows the result of tracking the car in area #1, and
Figure 9 (c) shows the result of tracking three
pedestrians in area #2. In Figs. 9 (b) and (c), all scan
data (black dots) are plotted in order for readers to
easily understand these figures. In addition, the
estimated size (blue cuboid) is plotted every 1 s (10
scans), and the estimated position (blue dot) every 0.1
s (1 scan).
In Fig. 9 (c), pedestrians #2 and #3 are tracked as
a large rectangle, because they walk side by side, and
their neighbouring moving cells are then clustered as
the same group.
Figure 10 shows the performance of the car
tracking shown in Fig. 9 (b). Figure 10 (a) shows the
result of an estimated size of the car. Figure 10 (b)
shows the error of an estimated position of the car. A
true position of the car is obtained by the GNSS/INS
unit mounted on the car. Figure 10 (c) shows the
result of an estimated velocity of the car. A true
velocity of the car is obtained by the GNSS/INS unit
mounted on the car.
As shown in Fig. 10 (a), the estimated error of
length becomes large after 150 scans, because a
distance between the bicycle and the car is large; in
75–150 scans, the distance is about 6 m, and scan data
of the whole car can thus be captured. However, after
150 scans, the distance becomes about 11 m, and scan
data of only the front part of the car can then be
captured. This is why the estimated length of the car
is smaller than the true length.
As shown in Fig. 10 (b), the position error is large
in the
X direction. In the world coordinate frame Σ
W
,
the east-west aligns with the
X axis, and the north-
south does with the
Y axis. The bicycle and car ran
from east to west. In the proposed method, the
centroid of the estimated rectangle is used as position
(measurement) of the tracked object. Because the car
follows the bicycle, the position on the front part of
the car is always estimated as shown in Fig. 11. On
the other hand, the GNSS/INS unit outputs the
position information of the rear part of the car. This is
why the position error in the
X direction is large.
We conducted another experiment, in which 34
pedestrians and a car existed. We compare the
tracking performance in the following four cases.
Case 1: Tracking using distortion correction and
map subtraction (proposed method),
Case 2: Tracking using map subtraction and no
distortion correction,
Case 3: Tracking using distortion correction and no
map subtraction, and
Case 4: Tracking using neither distortion correction
nor map subtraction.
Table 1 shows the tracking result, where
untracking means that tracking of moving objects
fails, and false tracking means that static objects are
tracked. It is clear from the table that the proposed
method (case 1) provides the tracking performance
better than the other cases.
(a) Estimated track of a car and pedestrians.
(b) Estimated track and size of a car in area #1.
(c) Estimated track and size of pedestrians in area #2.
Figure 9: Tracking result of a car and pedestrians (top
view).
-15
-10
-5
0
5
10
15
0 25 50 75 100 125 150 175 200 225 250 275 300 325 350
A
t
t
i
t
ude [deg]
Time [scan]
-50
-40
-30
-20
-
1
0
-70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 5
0
Y [m]
X [m]
Pedestrian #1
Pedestrians #2 and #3
Pedestrian #4
Car
Bicycle
Area #1
Area #2
Moving-object Tracking with Lidar Mounted on Two-wheeled Vehicle
457
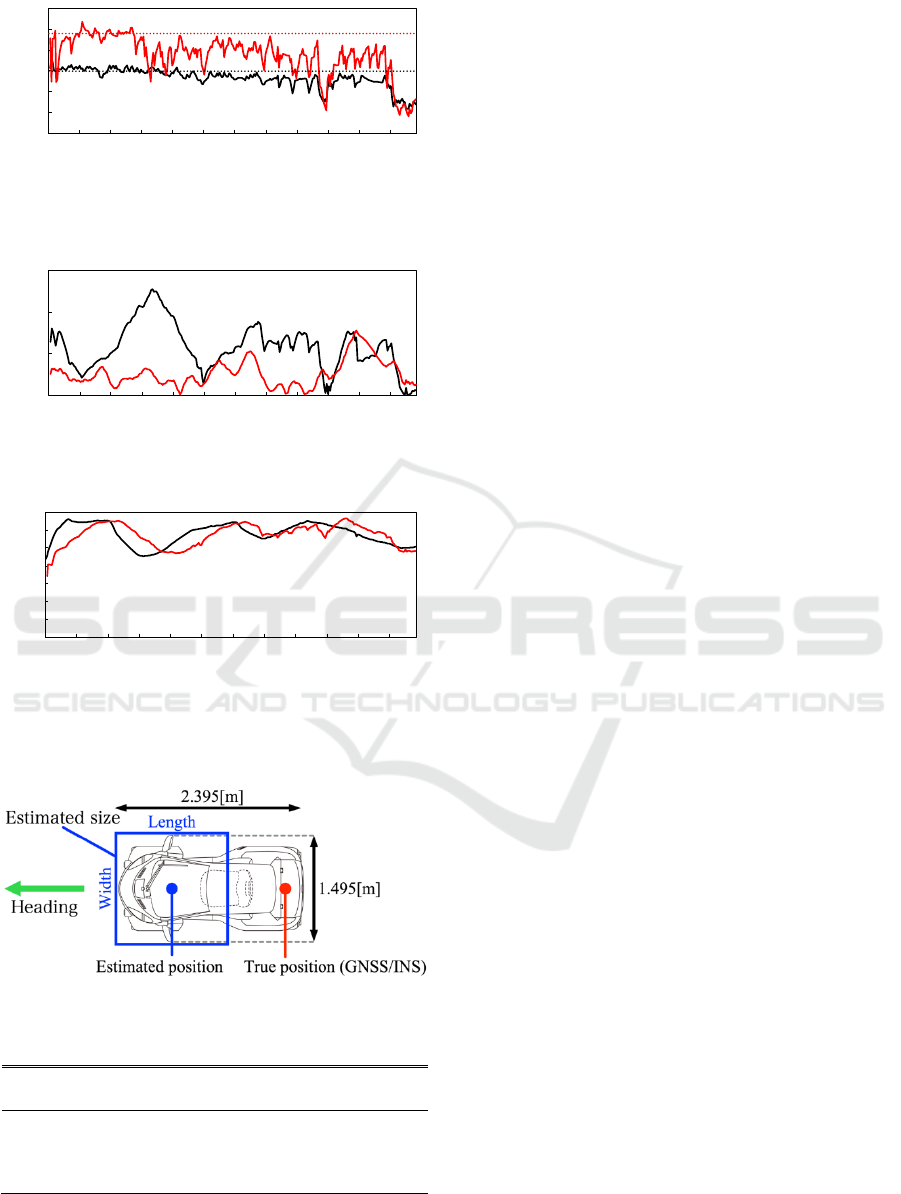
(a) Size. Black and red lines indicate the estimated width
and length, respectively. Their true values are indicated by
dashed lines.
(b) Position error. Black and red lines indicate the error of
the estimated positions in X and Y directions, respectively.
(c) Velocity. Black and red lines indicate the true and
estimated velocities, respectively.
Figure 10: Tracking result of a car.
Figure 11: Estimated size and position of a car (top view).
Table 1: The number of correct and incorrect tracking.
Correct
tracking
Untracking
False
tracking
Case 1 35 0 1
Case 2 26 9 (pedestrians) 1
Case 3 35 0 6
Case 4 26 9 (pedestrians) 10
6 CONCLUSIONS
This paper presented a moving-object tracking
method with the lidar mounted on a two-wheeled
vehicle. The self-pose of the vehicle at the time when
the lidar-scan data is captured was estimated by
interpolating the self-pose outputted from the
onboard GNSS/INS unit, and based on the estimated
self-pose, the distortion in the scan data was
corrected.
By comparing the corrected lidar-scan data with
the environment map, the subtracted scan data was
mapped onto the elevation map to detect and track
moving objects. The NDT scan matching method was
applied to the scan-data subtraction. The
experimental results of tracking pedestrians and a car
by a 32-layer lidar mounted on a bicycle validated the
efficacy of the proposed method.
As future works, we will extend the proposed
method to moving-object tracking in GNSS-denied
environments, in which the GNSS/INS unit cannot
work well. In addition, we will build moving-object
tracking system with a lidar mounted on a
motorcycle.
ACKNOWLEDGEMENTS
This research was partially supported by the JSPS-
Japan Society for the Promotion of Science
(Scientific Grants, Foundation Research (C) No.
18K04062).
REFERENCES
Amodio, A., Panzani, G., and Savaresi, S, M., 2017, Design
of a Lane Change Driver Assistance System with
Implementation and Testing on Motorbike, In
Proceeding of IEEE Intelligent Vehicles Symposium
(IV), pp. 947–952.
Barmpounakis, E, N., Vlahogianni, E, I., and Golias, J, C.,
2016, Intelligent Transportation Systems and Powered
Two Wheelers Traffic, In IEEE Transactions on
Intelligent Transportation Systems, Vol. 17, No. 4, pp.
908–916.
Biber, P. and Strasser, W., 2003, The Normal Distributions
Transform: A New Approach to Laser Scan Matching,
In Proceedings of IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS 2003), pp.
2743–2748.
Hashimoto, M., Ogata, S., Oba, F., and Murayama, T.,
2006, A Laser Based Multi-Target Tracking for Mobile
Robot, In Intelligent Autonomous Systems 9, pp. 135–
144.
0
0.5
1
1.5
2
2.5
3
75 100 125 150 175 200 225 250 275 300 325 350
Size [m]
Ti
m
e
[
scan
]
0
0.5
1
1.5
75 100 125 150 175 200 225 250 275 300 325 350
Position e
r
r
o
r
[m]
Time [scan]
0
2
4
6
8
10
12
1
4
75 100 125 150 175 200 225 250 275 300 325 350
Velocity [km/h]
Time [scan]
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
458

Inui, K., Morikawa, M., Hashimoto, M., Tokorodani, K.
and Takahashi, K., 2017, Distortion Correction of Laser
Scan Data from In-vehicle Laser Scanner based on
NDT scan-matching, In Proceedings of the 14th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO 2017), pp. 329–
334.
Jeon, W., and Rajamani, R., 2018, Rear Vehicle Tracking
on a Bicycle Using Active Sensor Orientation Control,
In IEEE Transactions on Intelligent Transportation
Systems. Vol. 19, No. 8, pp. 2638–2649.
Mertz, C., Navarro-Serment, L, E., MacLachlan, R.,
Rybski, P., Steinfeld, A., Suppe, A., Urmson, C.,
Vandapel, N., Hebert, M., Thorpe, C., Duggins, D., and
Gowdy, J., 2013, Moving Object Detection with Laser
Scanners, In Journal of Field Robotics, Vol. 30, pp. 17–
43.
Mukhtar, A., Xia, L., and Tang, T, B., 2015, Vehicle
Detection Techniques for Collision Avoidance
Systems: A Review, In IEEE Transactions on
Intelligent Transportation Systems, Vol.16 No. 5, pp.
2318–2338.
Munaro, M., Basso, F., and Menegatti, E., 2012, Tracking
People within Groups with RGB-D Data, In
Proceedings of IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS 2012), pp. 2101–
2107.
Rusu, R, B. and Cousins, S., 2011, 3D is Here: Point Cloud
Library (PCL), In Proceedings of 2011 IEEE
International Conference on Robotics and Automation
(ICRA).
Tamura, Y., Murabayashi, R., Hashimoto, M., and
Takahashi, K., 2017, Hierarchical Cooperative
Tracking of Vehicles and People Using Laser Scanners
Mounted on multiple mobile robots, In International
Journal on Advances in Intelligent Systems, Vol. 10,
No. 1& 2, pp. 90–101.
Thrun, S., Burgard, W., and Fox, D., 2005, Probabilistic
Robotics, In MIT press.
Moving-object Tracking with Lidar Mounted on Two-wheeled Vehicle
459
