
Asynchronous Control Design of Continuous-time Markovian Jump
Systems with Bounded Time-varying Transition Rates
Ngoc Hoai An Nguyen
a
and Sung Hyun Kim
b
School of Electrical Engineering, University of Ulsan, Daehak-ro 93, Nam-Gu, Ulsan, 680-749, South Korea
Keywords: Asynchronous Control, Dissipative Control, Markovian Jump Systems, Transition Rates.
Abstract:
The asynchronous control design of continuous-time Markovian jump systems with bounded time-varying
transition rates is addressed in this paper. According to the framework of parameterized linear matrix in-
equalities (PLMIs), essential stabilization conditions are established with consideration on dissipativity per-
formance and then transform to solvable sets of linear matrix inequalities (LMIs) under our proposed method.
Especially, our technique is derived from not only time-varying system modes but also asynchronous control
modes transition rates. The effectiveness of our method is then illustrated through our numerical example.
1 INTRODUCTION
Markovian jump systems (MJSs) is a prosperous re-
search area which have drawn energetic attraction
in both academic and industries communities due to
their advantages. Firstly, as a special class of hybrid
systems, MJSs involve both time and event-driven
mechanism to represent plants under abrupt changes
in structure and parameters, for examples, sudden
environment changes, component failures, package
dropout, subsystems interconnection adjustment. The
second advantageous aspect is that MJSs have been
devoted to the study of practically diverse application
such as communication networks, power systems, so-
lar receiver control, networked control aircraft flight
systems, robotics (see (Zhou et al., 2017; Liu et al.,
2017; Mao et al., 2007; Zhai et al., 2016; Joo and
Kim, 2015; Nguyen and Kim, 2019; Shi and Yu,
2009), etc). To dominate the variations among those
systems, MJSs have been extended from Markov pro-
cess which follows a certain transition rates matrix.
Recently, to cover a wider range of practical appli-
cations systems, the term transition rates are defined
as time-varying rather than ideally constant and time-
invariant. Rasing from this research trend, the an-
alyze technique emerged from bounded interval of
time-varying transition rates has been took advantage
to achieve many significant results in control commu-
nity (refer to (Kim, 2014b; Kim, 2014a; Nguyen et al.,
a
https://orcid.org/0000-0001-7651-2537
b
https://orcid.org/0000-0003-2495-7117
2016; Yin et al., 2018)), etc).
As for control synthesis, in past few decades, a lot
of research pursues the mode-independent control
method. Up to now, research trend has adopted to the
mode-dependent Lyapunov method in designing con-
trollers, with strict synchronization between plants
and controllers. Nonetheless, with the growing in
large scale and complexity of modern industrial pro-
cess, the system dynamic and controller are quite
different to each other. Therefore, a strict synchro-
nization is likely to be hard in real time since some-
times controller can not access exact mode informa-
tion from system, especially when the systems are in-
sensitive to some amount of uncertainties, device fail-
ure or external perturbation. Under this circumstance,
the necessity to discuss asynchronous phenomenon
for control synthesis/filter of MJSs is desired to fur-
ther explore.
Among those research on asynchronization mat-
ter on MJSs, the asynchronous L
2
-L
∞
filtering for
discrete-time MJSs with occurred sensor nonlinear-
ities satisfying the Bernoulli distribution are con-
cerned in (Wu et al., 2014). On another research
result, (see, for details, (Kim, 2019a) and (Kim,
2019b)) has discussed the issue of passivity-based
asynchronous controller, synchronous controller as
well as mode-independent controller for discrete-time
MJSs. Recently, asynchronous stabilization problem
for discrete-time MJSs was discussed at which both
synchronous case and asynchronous ones have been
surveyed to figure out sufficient and necessary sta-
bilization conditions (Guan et al., 2019). However,
384
Nguyen, N. and Kim, S.
Asynchronous Control Design of Continuous-time Markovian Jump Systems with Bounded Time-varying Transition Rates.
DOI: 10.5220/0007952103840389
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 384-389
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

there is still much room left on the asynchronous sta-
bilization for continuous-time MJSs, which motivates
us to conduct this paper.
The purpose of our paper is to address asynchronous
control design for continuous-time Markovian jump
systems with bounded time-varying transition rates
since the difficulty emerged from both asynchronous
phenomenon and unavailable transition rates need to
be discussed and enhanced. The contribution of our
paper can be itemized as follows:
• Our control method can deal with asynchronous
controller, partially asynchronous controller, as
well as perfectly synchronous controller based on
the assumption of conditional probability matrix
between system modes and controller modes.
• The robustness of controller has been taken to deal
with external factors such as system uncertain-
ties, disturbance so that the closed-loop system
is stochastically stable with strictly (Q ,S,R )-γ-
dissipative performance.
• The result is meaningful in practically real time
application since this paper pursues to adapt time-
varying transition rates, where system randomly
switches from one mode to another at time-
dependent pace.
• To be promise in our future research with the ex-
tension of application in nonhomogenous MJSs
at which transition rates are not only fixed or
bounded but also completely unknown.
Notations: The notations X ≥ Y and X > Y mean
that X −Y is positive semi-definite and positive def-
inite, respectively. In symmetric block matrices, the
asterisk (∗) is used as an ellipsis for terms induced
by symmetry. E{·} denotes the mathematical ex-
pectation; diag(·) stands for a block-diagonal ma-
trix; He{Q } = Q + Q
T
for any square matrix Q ;
and L
2
[0,∞) stands for the space of square summable
sequences over [0, ∞). For a
i
∈ {1,2,· · ·} such
that a
i+1
> a
i
, i ∈ {1, 2, ··· , n}, the following nota-
tions are used:
Q
i
T
i∈{a
1
,···,a
n
}
=
Q
T
a
1
··· Q
T
a
n
,
Q
i
D
i∈{a
1
,···,a
n
}
= diag
Q
a
1
,··· ,Q
a
n
, where Q
i
de-
notes real submatrix with appropriate dimensions or
scalar values.
2 SYSTEM DESCRIPTION AND
PRELIMINARIES
Let us consider the following continuous-time Marko-
vian jump system defined on a complete probability
space (Ω,F ,P ):
˙x(t) =
A(φ(t)) + ∆A(φ(t)
x(t)
+
B(φ(t)) + ∆B(φ(t))
u(t) + E(φ(t))w(t),
z(t) = C(φ(t))x(t) + D(φ(t))u(t),
(1)
where x(t) ∈ R
n
x
, u(t) ∈ R
n
u
, w(t) ∈ R
n
w
, z(t) ∈ R
n
z
,
and φ(t) ∈ N
φ
= {1, 2,...,n
φ
} denote the state, the
saturated control input, the disturbance input belong-
ing to L
2
[0,∞), the performance output, and the plant
operation mode, respectively. Especially, the process
{φ(t),t ≥ 0} is characterized by a continuous-time
nonhomogeneous Markov process governed by the
following transition probabilities (TPs):
Pr
φ(t + δ) = h
φ(t) = g
=
π
gh
(t)δ + o(δ) if h 6= g,
1 + π
gg
(t)δ + o(δ) if h = g,
where δ > 0, lim
δ→0
(o(δ)/δ) = 0, and π
gh
(t) denotes
the transition rate (TR) from mode g to mode h at time
t + δ, satisfying that
•
∑
h∈N
φ
π
gh
(t) ≡ 0, (2)
• π
gh
(t) ≥ 0, ∀h ∈ N
φ
\ {g}. (3)
Based on the property of TRs, this paper intends
to address the following two finite sets such that
H
g
S
e
H
g
= N
φ
holds: for g ∈ N
φ
,
H
g
=
n
h
π
gh
(t) = π
gh
is time-invariant and completely known
o
, (4)
e
H
g
=
n
h
π
gh
(t)
is unknown but bounded as π
gh
≤ π
gh
(t) ≤ π
gh
o
.
(5)
Then, from (2), (4), and (5), it is
•
∑
h∈
e
H
g
π
gh
(t) + Π
+
g
≡ 0, (6)
• π
gh
(t) ∈
π
gh
,π
gh
, ∀h ∈
e
H
g
, (7)
where Π
+
g
=
∑
h∈H
g
π
gh
. Further, in (1), the
parameter uncertainties are represented as fol-
lows: ∆A(φ(t)) = G(φ(t))∆(φ(t),t)H
1
(φ(t))
and ∆B(φ(t)) = G(φ(t))∆(φ(t),t)H
2
(φ(t)),
where G(φ(t) = g) = G
g
, H
1
(φ(t) = g) = H
1g
,
and H
2
(φ(t) = g) = H
2g
are known constant
matrices with appropriate dimensions; and
∆(φ(t) = g,t) = ∆
g
(t) ∈ R
n
p
×n
q
is an unknown
matrix with Lebesgue measurable elements such that
Asynchronous Control Design of Continuous-time Markovian Jump Systems with Bounded Time-varying Transition Rates
385

k∆
g
(t)k ≤ 1 holds. In what follows, let us consider
an asynchronous mode-dependent control law of the
following form:
u(t) = F(ρ(t))x(t), (8)
where ρ(t) ∈ N
ρ
= {1,2,·· · ,n
ρ
} denotes the control
mode, and F(ρ(t) = `) = F
`
denotes the control gain
to be designed later. Further, since the control mode
ρ(t) is definitely associated with the plant mode φ(t),
it is supposed to be characterized by the following
conditional probability:
Pr
ρ(t) = `
φ(t) = g
= ϖ
g
`
, ∀g ∈ N
φ
, ` ∈ N
ρ
, (9)
which satisfies
∑
`∈N
ρ
ϖ
g
`
= 1 and 0 ≤ ϖ
g
`
≤ 1 for all
g and `. As a result, the closed-loop system with (1)
and (8) is described as follows:
(
˙x(t) =
¯
A
g`
+ ∆
¯
A
g`
x(t) + E
g
w(t),
z(t) =
¯
C
g`
x(t),
(10)
where
¯
A
g`
= A
g
+ B
g
F
`
,
¯
C
g`
= C
g
+ D
g
F
`
, ∆
¯
A
g`
=
G
g
∆
g
(t)
¯
H
g`
, and
¯
H
g`
= H
1g
+ H
2g
F
`
.
Remark 2.1. As reported in (Choi et al., 2017), the
strict (Q ,S,R )-γ-dissipativity performance can be re-
duced into two special performances: 1) H
∞
perfor-
mance by setting Q = −I, S = 0, and R = (γ
2
+ γ)I;
and 2) passivity performance by setting Q = 0, S = I,
and R = 2γI.
3 CONTROL DESIGN
Let us consider the following mode-dependent Lya-
punov function:
V (t,ρ(t)) = x
T
(t)P(ρ(t))x(t), (11)
where 0 < P(ρ(t) = `) = P
`
∈ R
n
x
×n
x
. Then the weak
infinitesimal operator of the process {x(t),φ(t),ρ(t)}
acting on V (t) := V (t,ρ(t)) is given by
∇V (t) = lim
δ→0
1
δ
E
n
V
t + δ, ρ(t + δ) = m
φ(t) = g
−V (t,ρ(t) = `|φ(t) = g)
o
= lim
δ→0
1
δ
(
∑
m∈N
ρ
∑
h∈N
φ
\{g}
ϖ
h
m
·
π
gh
(t)δ + o(δ)
×V (t + δ,m)
+ϖ
g
m
·
π
gg
(t)δ + o(δ) + 1
×V (t + δ, m)
!
−
∑
`∈N
ρ
ϖ
g
`
V (t, `)
)
=
∑
m∈N
ρ
∑
h∈N
φ
ϖ
h
m
π
gh
(t)V (t,m) +
∑
`∈N
ρ
ϖ
g
`
˙
V (t,`)
=
∑
`∈N
ρ
ϖ
g
`
∑
h∈N
φ
∑
m∈N
ρ
π
gh
(t)ϖ
h
m
V (t,m)+
˙
V (t,`)
.
According to (10),
∇V (t) =
∑
`∈N
ρ
ϖ
g
`
η
T
(t)
Ψ
g`
P
`
E
g
E
T
g
P
`
0
η(t), (12)
where
η(t) =
x
T
(t) w
T
(t)
T
∈ R
n
η
,(i.e.,n
η
= n
x
+ n
w
),
Ψ
g`
= P
g
+ He
n
P
`
(
¯
A
g`
+ ∆
¯
A
g`
)
o
,
P
g
=
∑
h∈N
φ
∑
m∈N
ρ
π
gh
(t)ϖ
h
m
P
m
.
The following lemma provides the robust stochastic
stability condition for (10) with w(t) ≡ 0.
Lemma 3.1. Suppose that there exist P
`
> 0 and F
`
such that the following condition holds:
0 > Ψ
g`
, ∀g ∈ N
φ
, ` ∈ N
ρ
. (13)
Then closed-loop system (10) with w(t) ≡ 0 can be
said to be robustly stochastically stable.
The following lemma provides the robust asyn-
chronous dissipative control synthesis conditions for
(10), formulated in terms of parameterized linear ma-
trix inequalities (PLMIs).
Lemma 3.2. For a prescribed scalar µ, suppose that
there exist matrices 0 <
¯
P
`
=
¯
P
T
`
∈ R
n
x
×n
x
, W
`m
=
W
T
`m
∈ R
n
x
×n
x
,
¯
F
`
∈ R
n
u
×n
x
; and scalar variables γ,
α
g
> 0 such that the following conditions hold: for
g ∈ N
φ
, ` ∈ N
ρ
,
0>
He
A
g
¯
P
`
+ B
g
¯
F
`
+α
g
G
g
G
T
g
(∗) (∗) (∗)
E
T
g
− SC
g
¯
P
`
− SD
g
¯
F
`
−R +γI 0 0
Q
1
C
g
¯
P
`
+ Q
1
D
g
¯
F
`
0 −I 0
H
1g
¯
P
`
+ H
2g
¯
F
`
0 0 −α
g
I
+ e
T
∑
h∈N
φ
\{g}
π
gh
(t)
¯
W
h
(µ)
!
e, (14)
0 ≤
W
`m
(∗)
¯
P
`
¯
P
m
, ∀m ∈ N
ρ
. (15)
where e =
I 0 0 0
∈ R
n
x
×(n
x
+n
w
+n
z
+n
q
)
, and
¯
W
h
(µ) =
∑
m∈N
ρ
ϖ
h
m
W
`m
− 2µϖ
g
m
¯
P
`
+ µ
2
ϖ
g
m
¯
P
m
.
Then closed-loop system (10) is robustly stochasti-
cally stable and strictly (Q ,S , R )-γ-dissipative, and
the control gains are reconstructed as follows: F
`
=
¯
F
`
¯
P
−1
`
, ∀` ∈ N
ρ
.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
386

The following theorem provides the relaxed robust
asynchronous control synthesis conditions for (10)
with strict (Q ,S,R )-γ-dissipativity performance, for-
mulated in terms of linear matrix inequalities (LMIs).
Theorem 3.1. For a prescribed scalar µ, suppose
that there exist symmetric matrix 0 <
¯
P
`
∈ R
n
x
×n
x
,
W
`m
∈ R
n
x
×n
x
; matrices
¯
F
`
∈ R
m×n
x
, X
g
∈ R
n
x
×n
x
,
Y
gh
∈ R
n
x
×n
x
; and γ, α
g
> 0 such that the following
conditions hold: for g ∈ N
φ
, ` ∈ N
ρ
,
0 >
¯
Γ
g`
=
"
Γ
g`
(∗)
h
1
2
¯
W
h
(µ)e
i
h∈
e
H
g
\{g}
0
#
+
"
X
(1,1)
g
+Y
(1,1)
g
(∗)
X
(2,1)
g
+Y
(2,1)
g
Y
(2,2)
g
#
, (16)
0 ≤
W
`m
(∗)
¯
P
`
¯
P
m
, ∀m ∈ N
ρ
, (17)
where
Γ
g`
=
Γ
(1,1)
g`
(∗) (∗) (∗)
E
T
g
− SC
g
¯
P
`
− SD
g
¯
F
`
−R + γI 0 0
Q
1
C
g
¯
P
`
+ Q
1
D
g
¯
F
`
0 −I 0
H
1g
¯
P
`
+ H
2g
¯
F
`
0 0 −α
g
I
,
Γ
(1,1)
g`
= He
A
g
¯
P
`
+ B
g
¯
F
`
+ α
g
G
g
G
T
g
+
∑
h∈H
g
\{g}
π
gh
¯
W
h
(µ),
X
(1,1)
g
=
e
T
He
Π
+
g
X
g
e, if g ∈ H
g
0, otherwise
,
Y
(1,1)
g
=
∑
h∈
e
H
g
\{g}
e
T
He
π
gh
π
gh
Y
gh
e,
X
(2,1)
g
=
X
g
e
h∈
e
H
g
\{g}
, if g ∈ H
g
0, otherwise
,
Y
(2,1)
g
=
h
(−π
gh
−π
gh
)Y
gh
e
i
h∈
e
H
g
\{g}
,
Y
(2,2)
g
=
h
He
Y
gh
i
D
h∈
e
H
g
\{g}
,
e =
I 0 0 0
∈ R
n
x
×(n
x
+n
w
+n
z
+n
q
)
,
¯
W
h
(µ) =
∑
m∈N
ρ
ϖ
h
m
W
`m
− 2µϖ
g
m
¯
P
`
+ µ
2
ϖ
g
m
¯
P
m
.
Then closed-loop system (10) is robustly stochasti-
cally stable and strictly (Q ,S , R )-γ-dissipative, and
the control gains are reconstructed as follows:
F
`
=
¯
F
`
¯
P
−1
`
, ∀` ∈ N
ρ
. (18)
4 ILLUSTRATIVE EXAMPLE
Example 1: Let us consider the following
continuous-time nonhomogenous MJS with four
modes, used in (Zong et al., 2013):
A
1
=
2 2
1 −3
, A
2
=
1 2
0 −1
,
A
3
=
2 3
1 −1
, A
4
=
1 1
2 −3
,
B
1
=
1
1
, B
2
=
2
1
, B
3
=
3
1
,
B
4
=
4
1
, E
1
=
1
0
, E
2
=
0.5
0
,
E
3
=
0.3
0
, E
4
=
0.4
0
, C
1
=
1 2
,
C
2
=
1 1
, C
3
=
1 3
, C
4
=
0 1
,
G
1
=
0.1
0
, G
2
=
0.1
0
, G
3
=
0.1
0
,
G
4
=
0.2
0
, H
11
=
0.1 0.1
,
H
12
=
0.2 0.3
, H
13
=
0.2 0.3
,
H
14
=
0.2 0.4
, H
21
= 0.1,
H
22
= 0.2, H
23
= 0.3, H
24
= 0.4,
D
1
= 0.1, D
2
= 0.2, D
3
= 0.3, D
4
= 0.4. (19)
Further, the TR matrix is taken as follows:
h
π
gh
(t)
i
g,h∈N
φ
=
× 0.3 × 0.4
× −1 0.3 ×
0.8 × −1.3 ×
1.0 × × −1.5
, (20)
where all × denote the bounded TRs with upper and
lower bound values listed in Table 1.
Table 1: Interval of bounded transition rates.
π
11
(t) [-1.4, -0.7] π
32
(t) [0, 0.5]
π
13
(t) [0, 0.7] π
34
(t) [0, 0.5]
π
21
(t) [0, 0.7] π
42
(t) [0, 0.5]
π
24
(t) [0, 0.7] π
43
(t) [0, 0.5]
That is, it is given that H
1
= {2,4},
e
H
1
=
{1,3}, H
2
= {2,3},
e
H
2
= {1,4}, H
3
= {1,3},
e
H
3
=
{2,4}, H
4
= {1, 4},
e
H
4
= {2, 3}. Meanwhile, the
conditional probability matrix is taken as follows:
h
ϖ
g`
i
g∈N
φ
,`∈N
ρ
=
0.4 0.2 0.3 0.1
0.1 0.5 0.3 0.1
0.2 0.3 0.4 0.1
0.1 0.3 0.4 0.2
. (21)
The goal of this example is to design an asynchronous
mode-dependent state-feedback control (8) such that
the closed-loop system is stochastically stable with
strict strictly (Q ,S , R )-γ-dissipativity performance.
Asynchronous Control Design of Continuous-time Markovian Jump Systems with Bounded Time-varying Transition Rates
387
To this end, by Theorem 1, the following feasible so-
lution is obtained: γ = 0.4470, and
F
1
=
−7.9921 −11.8143
,
F
2
=
−7.8669 −11.6618
,
F
3
=
−7.9062 −11.7685
,
F
4
=
−7.8386 −11.4010
.
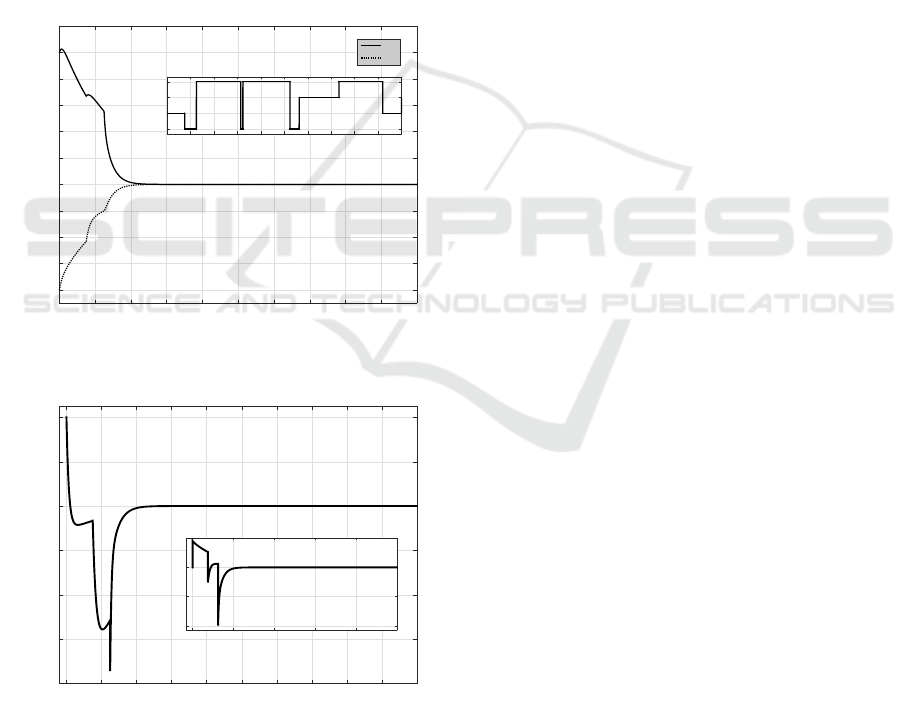
Furthermore, to show the validity of the obtained con-
trol gains, Figure 1 demonstrates the state response
of the closed-loop system, where x
0
= [0.5 − 0.4]
T
,
w(t) = 0.1e
−0.3t
sin(0.2πt), and the applied control
input is plotted in Figure 2. Clearly, from Figure
1, it can be found that the state gradually converges
to zero as time increases despite the presence of the
asynchronous controller and incomplete knowledge
of transition rates.
Time (sec)
0 1 2 3 4 5 6 7 8 9 10
State x(t)
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
x
1
(t)
x
2
(t)
Time (sec)
0 1 2 3 4 5 6 7 8 9 10
Plant Mode φ(t)
1
2
3
4
Figure 1: State response x(t) and mode evolution ρ(t) used
in Example 1.
Time (sec)
0 1 2 3 4 5 6 7 8 9 10
Control Input u(t)
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Time (sec)
0 2 4 6 8 10
Performance Output z(t)
# 10
-4
-4
-2
0
2
Figure 2: Control input u(t) and performance output z(t).
5 CONCLUSIONS
This paper has investigated the problem of asyn-
chronous control for continuous-time MJSs with
bounded time-varying transition rates and system un-
certainties. In order to obtain a finite set of solvable
LMIs from mode-dependent PLMIs, our method has
been proposed to conduct the impact of both system
modes and controller modes on stabilization condi-
tions. Eventually, this paper has presented the LMIs-
based stabilization conditions to design an asyn-
chronous controller with dissipativity performance.
ACKNOWLEDGEMENTS
This work was supported by the National Research
Foundation of Korea Grant funded by the Korean
Government ( NRF- 2018R1D1A1B07041456 ).
REFERENCES
Choi, H. D., Ahn, C. K., Shi, P., Wu, L., and Lim, M. T.
(2017). Dynamic output-feedback dissipative control
for T–S fuzzy systems with time-varying input delay
and output constraints. IEEE Transactions on Fuzzy
Systems, 25(3), 511-526.
Guan, C., Fei, Z., and Yang, T. (2019). Necessary and
sufficient criteria for asynchronous stabilization of
Markovian jump systems. Journal of the Franklin In-
stitute, 356(3), 1468-1483.
Joo, H. and Kim, S. H. (2015). LPV control with pole
placement constraints for synchronous buck convert-
ers with piecewise-constant loads. Mathematical
Problems in Engineering, Article ID 686857.
Kim, S. H. (2014a). Control synthesis of Markovian jump
fuzzy systems based on a relaxation scheme for in-
complete transition probability descriptions. Nonlin-
ear Dynamics, 78(1), 691-701.
Kim, S. H. (2014b). Less conservative stabilization con-
ditions for Markovian jump systems with partly un-
known transition probabilities. Journal of the Franklin
Institute, 351(5), 3042-3052.
Kim, S. H. (2019a). Asynchronous dissipative filter design
of nonhomogeneous Markovian jump fuzzy systems
via relaxation of triple-parameterized matrix inequali-
ties. Information Sciences, 478, 564-579.
Kim, S. H. (2019b). Dissipative control of Markovian jump
fuzzy systems under nonhomogeneity and asynchro-
nism. Nonlinear Dynamics, 1-18.
Liu, M., Zhang, L., Shi, P., and Zhao, Y. (2017). Slid-
ing mode control of continuous-time Markovian jump
systems with digital data transmission. Automatica,
80, 200-209.
Mao, Z., Jiang, B., and Shi, P. (2007). H
∞
fault detection fil-
ter design for networked control systems modelled by
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
388

discrete Markovian jump systems. IET control theory
& applications, 1(5), 1336-1343.
Nguyen, N. H. A. and Kim, S. H. (2019). Relaxed
robust stabilization conditions for nonhomogeneous
Markovian jump systems with actuator saturation and
general switching policies. International Journal of
Control, Automation and Systems, 17(3), 586-596.
Nguyen, N. H. A., Kim, S. H., and Choi, J. (2016). Stabi-
lization of semi-Markovian jump systems with uncer-
tain probability intensities and its extension to quan-
tized control. Mathematical Problems in Engineering,
Volume 2016, Article ID 8417475.
Shi, Y. and Yu, B. (2009). Output feedback stabilization of
networked control systems with random delays mod-
eled by Markov chains. IEEE Transactions on Auto-
matic Control, 54(7), 1668-1674.
Wu, Z. G., Shi, P., Shu, Z., Su, H., and Lu, R. (2014). Asyn-
chronous L
2
-L
∞
filtering for discrete-time stochastic
Markov jump systems with randomly occurred sensor
nonlinearities. Automatica, 50(1), 180-186.
Yin, Y., Zhu, L., Zeng, H., Liu, Y., and Liu, F.
(2018). Stochastic stability analysis of integral non-
homogeneous Markov jump systems. International
Journal of Systems Science, 49(3), 479-485.
Zhai, D., An, L., Li, J., and Zhang, Q. (2016). Fault detec-
tion for stochastic parameter-varying Markovian jump
systems with application to networked control sys-
tems. Applied Mathematical Modelling, 40(3), 2368-
2383.
Zhou, J., Dong, H., and Feng, J. (2017). Event-triggered
communication for synchronization of Markovian
jump delayed complex networks with partially un-
known transition rates. Applied Mathematics and
Computation, 293, 617-629.
Zong, G., Yang, D., Hou, L., and Wang, Q. (2013). Robust
finite-time H
∞
control for Markovian jump systems
with partially known transition probabilities. Journal
of the Franklin Institute, 350(6), 1562-1578.
Asynchronous Control Design of Continuous-time Markovian Jump Systems with Bounded Time-varying Transition Rates
389
