
A Preliminary Study of Ankle Variable Hybrid Above-knee
Prostheses
Su-Hong Eom
1a
, Sun-Jong Na
1b
, Sang-Hyun Lee
1
, Se-Hoon Park
2
and Eung-Hyuk Lee
1
1
Department of Electronic Engineering, Korea Polytechnic University, Siheung City, Gyeonggi-do, Korea
2
Korea Orthopedics & Rehabilitation Engineering Center, Incheon, Korea
Keywords: Ankle Variable Prostheses, Hybrid Above-knee Prosthesis, Active and Semiactive Prostheses.
Abstract: This study is a preliminary study to solve problems in gait imbalance at slope ways and low ramps with ankle
variable hybrid above-knee prostheses. For the purpose of implementing ankle variable control, the stance
phase in gait was determined as a step-by-step manner and the threshold values were derived through the
decision tree learning method based on inertial sensor data in verifying the swing phase. It can be used to
perform the ankle variable control. The control of the hybrid above-knee prosthesis was demonstrated by
measuring butterfly diagrams on a low ramp for verifying the gait balance in the test ramp.
1 INTRODUCTION
Prostheses are an aid used by people who have
amputated legs due to natural causes or accidents
(Dongfang Xu, et al., 2018). According to a WHO
report in 2017, there are an estimated 30 million
people who have lower limb amputation disorders,
and 60 million people around 2025 throughout the
world (WHO, 2018). Therefore, more convenient
and more natural functional consideration are being
paid to their lost body restoration devices (Steven
Culver, et al., 2018; Matthew L. Handford and
Manoj Srinivasan, 2018).
Prostheses are divided into two different types,
above-knee prostheses and below-knee prostheses,
depending on the area of the amputation level. The
above-knee prostheses are those used by the
amputee below the knee, and the below-knee
prostheses are those used by the lower ankle
amputee. Due to this location of amputation, the
below-knee prosthesis users are generally less
uncomfortable with walking by using it than the
above knee prosthesis users (Jinying Zhu, et al.,
2014; Kyle J. Kaveny, et al., 2018). Therefore, the
objective of this study is to develop prostheses with
more comfortable and natural functions for the
subjects of above-knee prosthesis users who feel
pains in their gait.
a
https://orcid.org/0000-0001-8493-1432
b
https://orcid.org/0000-0002-0601-9058
Recently, the research trend of above-knee
prostheses is developing from passive to intelligent
type prostheses, and the intelligent type prostheses
are divided into powered types, which are directly
involved in the movement of the knee joint, and
passive types (Elissa D. Ledoux and Michael
Goldfarb, 2017; D. Quintero, D. J. Villarreal, D.
Lambert, S. Kapp, and R. D. Gregg, 2018). In the
case of powered prostheses, it can produce a similar
reproduction of a person's gait trajectory because it
drives the knee joint using a motor. However, there
is a risk that the prostheses may stop while walking
due to the limitations of weight and application time
of batteries. In order to overcome the limitations,
recently, hybrid type prostheses, which combine
passive and powered types, are being researched and
developed (M. Bellmann, et al., 2010; B. Lawson, et
al., 2013; B. E. Lawson, et al., 2014).
The current representative hybrid above-knee
prostheses are the MIT Knee and RIC's hybrid knee
(T. Lenzi, et al., 2015). The MIT Knee uses motor
power only in the swing phase and is powered as a
passive type in the stance phase. Unlike the MIT
Knee, the RIC's hybrid knee operates in a passive
type in the swing phase and uses motor power
selectively when optional active force is required in
the stance phase. Therefore, although this control
method is not a big problem with level walking, it
Eom, S., Na, S., Lee, S., Park, S. and Lee, E.
A Preliminary Study of Ankle Variable Hybrid Above-knee Prostheses.
DOI: 10.5220/0007952807890794
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 789-794
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
789

causes gait imbalance due to short widths of the
affected area caused by passive type prostheses
because the bounce trajectory of the knees generated
by the initial contact (I.C.) phase, loading response
(L.R.), phase, and intermediate stance (M.St., Mid-
Stance) phase in the gait of the general stance phase
is the same as that of the walkway when entering
slopes or on low ramps.
In this study, therefore, the gait imbalance will be
compensated by changing the ankle joint for the
missing in the knee joint using the below-knee
prosthesis, which is implemented by a variable
hydraulic cylinder applied to the ankle joint in order
to solve the problem.
The method proposed in this study is to attach a
variable below-knee with a variable hydraulic
cylinder to the above-knee prosthesis that uses power
only in the swing phase to give the ankle a flexible
change. However, the flexible state of the ankle shall
be fixed before the toe-off point at which the foot falls
off the ground. This is because the toe-off is the time
to gain the gait momentum. Thus, the pressure of the
hydraulic cylinder was set to a maximum level before
the toe-off by estimating the stance phase of the
prosthesis step-by-step.
In order to determine whether this method of gait
can solve the imbalance, the butterfly diagrams
between the affected and the unaffected sides were
measured and evaluated.
2 METHOD
2.1 Ankle Variable Hybrid Prosthesis
The prostheses used in this study are those that were
co-studied with the Korea Orthopedics &
Rehabilitation Engineering Center, as shown in Fig.1.
The range of motion of the knee joint is 0º~90º and
the range of motion of the ankle joint is presented by
16° of planar flexion and 18° of dorsiflexion. The
total weight is 4Kg; knee 2.1Kg, ankle 1.4Kg, battery
0.35Kg, and controller 0.15Kg. In the below-knee
prosthesis, there is only a motor to control the
hydraulic nozzle and no motor for the powered assist
function.
Figure 1: Hybrid above-knee prosthesis of KOREC.
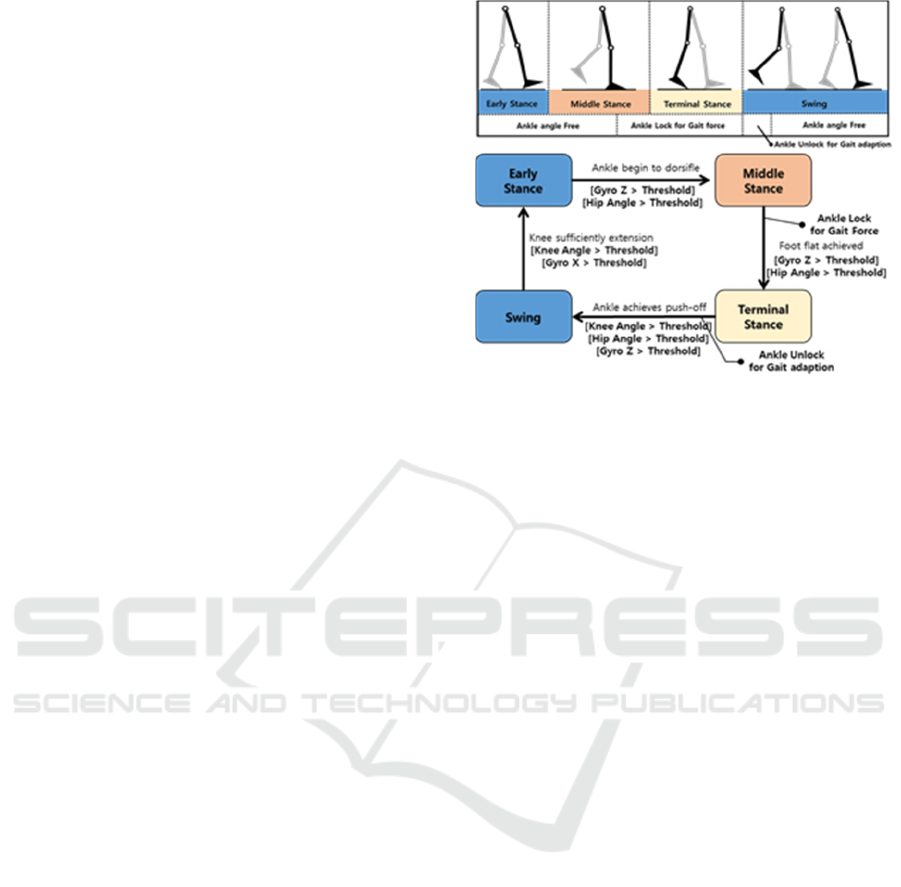
2.2 Gait Phase Detection Algorithm
Since the hybrid prosthesis applied in this paper does
not have power assist in the stance phase, the gait
trajectory in the stance phase resembles the passive
prosthesis as shown in Fig. 2. Thus, it is not possible
to determine the gait phase based on the gait
trajectory. In this study, therefore, the initial contact
phase, intermediate stance phase, terminal stance
phase, and swing phase were determined by the hip
angles, knee angles, progressive angular velocity of
the prosthesis, and the angular velocity of the Yaw-
axis of gait based on inertial sensors. The threshold
values for the determination were derived using an IF
~THEN format based on the decision tree learning
method in as shown in Fig. 2. Here, the decision tree
learning method was applied to the learner because
the sequence of gait is interpreted as the State
Machine behavior, which is the specification for the
sequential occurrence.
Figure 2: Gait phase detection using a learner.
2.2.1 Decision Tree Learning Method
The decision tree learning method is a learner that
classifies or predicts dependent variables by changing
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
790
the rule of decision making into a tree structure as one
of the instructional learning that is taught with a label
on the training data. It explores the characteristics,
patterns, and rules of the target based on structural or
unstructured data and analyzes various factors that
show relevance. It is possible to see the process of the
analysis and is easy to interpret and understand. Also,
it has the advantage of being stable and not having to
process data. The decision tree learning method is a
learner that can be both categorization and regression
and can predict both categories and continuous
numbers. Recently, a research has been conducted to
classify images using the decision tree learning
method as well as numerical data (Han Liu, et al.,
2017).
x, Y
,
,
,⋯,
,
(1)
The decision tree learning method is represented by
Eq. (1) and vector Y consists of labels and vector x,
which is a set of input variables
,
,
, and so on.
In the decision tree, the starting node is called a
root node and it consists of a branch that connects
between the child nodes. The last node that ends the
classification is called the terminal node, and the
number of branches between the root node and the
end node is called depth.
The decision tree learning method proceeds with
the separation of data in a way that reduces the
impurity as much. The Gini Index, used as an
indicator of the impurity, refers to the probability that
an item will be randomly selected from a set and then
misplaced when estimating a label. The equation for
the Gini Index is as shown in Eq. (2).
.
1
∑
w (2)
here, k∈1,2,3,⋯,m and p is the data in a set
labeled i and the Gini Index as a value between 0
and 1.
2.3 Hybrid Prosthesis Control
The control of the ankle variable above-knee
prosthesis proposed in this study is as follows. The
control is largely divided into two stages. The first
control is to detect the intermediate stance phase in
the stance phase so that the ankle variable can be fixed
before the final stance phase in order to obtain gait
momentum in the terminal stance phase. The second
control is to release the lock on the ankle from the
swing phase in order to move the ankle during the
initial contact and intermediate stance phases by
inertia. Fig. 3 shows this control sequence.
Figure 3: Control block of the ankle variable hybrid
prosthesis.
3 IMPLEMENTATION AND
EVALUATION OF THE
PRELIMINARY STUDY
3.1 Training and Learning in the Gait
Phase
In this study, a decision tree learning method was
proposed to determine the gait phase using inertial
sensors in the passive prosthesis-based gait.
Therefore, to obtain training data for learning, we
used the 3R60 prosthesis, Ottobock, to the socket that
can be worn by normal people, as shown in Figure 4,
in order to obtain training data for learning. Then, a
precision small encoder was attached to make certain
changes in the joint, together with inertial sensor data.
The small rotary encoder was a product of Autonics
and the specification is 360 pulses/revolution. The
inertial sensor was NGIMU from x-io Technologies
and acquired all data through WiFi communication.
The reason that we chose the 3R60 prosthesis as a
passive type is to fit into the same experimental
condition as the user of above-knee prostheses.
The training data were obtained from two healthy
70Kg and three 80Kg men in their 20s, and a passive
type above-knee prosthesis user with 72Kg weight on
the right side of the Stump Length 44cm.
In the experiment, the gait data was obtained by a
total of 500 times with a width of 30cm and five
continuous gait steps in which 80% were used as
training data, and 20% were used as verification data.
A Preliminary Study of Ankle Variable Hybrid Above-knee Prostheses
791

Figure 4: Passive type prosthesis adaptor and sensor
attachment locations, experimental setting image and
coordinate system used in this experiment.
The values used as an element of the decision tree
in the acquired data are the angle of the change in the
knee angles obtained by the small encoder, the change
in the hip angles of the prosthesis leg acquired by the
inertia sensor, the angular velocity of the gait
direction of the prosthesis, and the angular velocity of
the Yaw axis issued during gait. Fig. 5 represents the
acquired data.
In Fig. 5, the knee angle increases sharply at the
beginning of the swing phase, and the hip angle
increases gradually from the stance phase and begins
to decrease at the beginning of the swing phase. The
Gyro Z is a Yaw axis movement in the direction of the
prosthesis in the swing phase. Data changes on the
Yaw axis can be interpreted as a reflection of the
amount of movement that occurs when the pelvis
moves during gait. Therefore, it is possible to verify
that the value of the change is significant in the swing
phase.
However, the decision tree was learned with the
emphasis on the relation between the knee angle, hip
angle, and Gyro Z mentioned previously because the
Giro X value, the angular velocity in the gait progress,
did not change much of the acquired data.
Figure 5: Single gait phase for the machine learning.
3.1.1 Evaluation of the Threshold Values
Determined by the Decision Tree
Learning Method
The threshold values derived from the decision tree
learning method performed to identify the gait phase
of the passive type prosthesis proposed in this study
are shown in Table 1. The threshold values are
optimized for the right-side above-knee prosthesis
wearer for the final evaluation in this study.
For the evaluation of the derived threshold values,
an evaluation program was produced as shown in Fig.
6 and a simulation was performed by applying 20%
of the acquired data randomly. As a result, the
accuracy of 98.6% of the initial contact phase, 97.2%
of the intermediate stance phase, 98.9% of the
terminal stance phase, and 99.8% of the swing phase
was derived. Also, the trigger signal to release the
lock on the ankle was 99% accuracy
In addition, it showed that there is room for
improving the accuracy of the trigger signal because
the trigger signal for setting the lock on the ankle was
detected with an average of 97.2% accuracy.
Table 1: Threshold values of the gait phase derived from
the learning.
Phases
Boundary Value
Initial
Contact
Gyro Z < -10.392, Hip angle < 1.09251,
Knee angle <= 0.432182, and the other
three thresholds
Mid
Stance
Gyro Z < -10.392, Hip angle >= 1.09251,
Hip angle < -11.2027, and the other one
threshold
Terminal
Stance
Gyro Z < -10.392, Hip angle >= 1.09251,
Hip angle < -11.2027, and Gyro X >=
7.72385
Swing
Gyro Z >= -10.392, Knee angle >= 1.09251
,
Hip angle >= -3.47349, and the other
three thresholds
Figure 6: Evaluation program of the learner.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
792
3.2 Evaluation of the Gait Balance in
the Ankle Variable Control
An experiment that determines whether the variable
control was properly performed was implemented in
order to evaluate the gait balance as the ankle variable
control was applied based on the gait phase of the
classified stance phase. The experiment confirmed
the change of the ankle with a three-dimensional
motion analyzer based on the control trigger signal
from the classifier. A three-dimensional motion
analysis system (Cortex 6.02, Motion Analysis Corp.,
USA) was used to confirm the results. The system
consists of 12 infrared cameras, with 120 Hz of
sampling and 12.5Cm diameter reflective markers.
The experiment for the evaluation measured changes
in the ankle by attaching markers on both ankles.
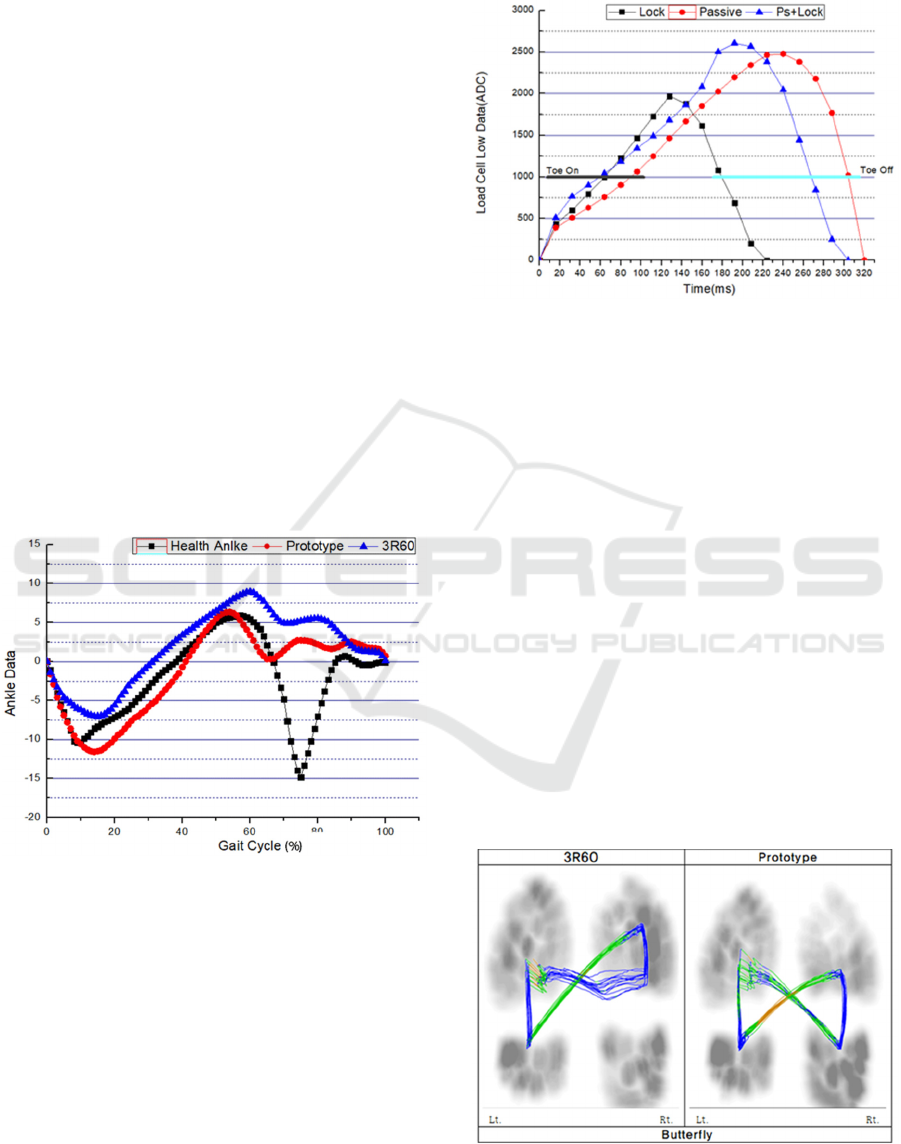
In the first experiment, the angle changes of the
planar flexion and dorsiflexion of the ankle were
observed. The measured graph is shown in Fig. 7. It
was confirmed that proper changes in the ankle alone
represent gait trajectories, which are similar to the
actual healthy angle. Thus, it has been confirmed that
the ankle variable control can help the gait balance of
the above-knee prosthesis users.
Figure 7: Gait trajectory of Helthy Ankle, Variable (Non-
Powered) Ankle and Fixed Ankle.
In the second experiment, seen the differences of
unaffected stride in general ankles fixed type
prosthesis whether can be solved. The experiment
utilizes a load cell sensor mounted on the prosthesis.
The load cell is tied to the joint of the transfemoral
prosthesis and lower limb prosthesis. The experiment
was conducted under three conditions: the ankle was
fixed from the beginning, the variable state from the
swing phase to the intermediate stance phase and
fixed after the intermediate stance phase, and the
variable conditions between all gait cycles. The
results are presented in Fig. 8.
Figure 8: Gait stance according to the Variation of Ankle
Control.
When walking with the ankle in a fixed state, the
toe off point tends to be shortened, and in contrast, the
toe off point could be confirmed to be longer if the
ankle is set as a flexible state. Therefore, it has been
confirmed that the appropriate toe off timing can help
with gait balance.
Finally, the dynamic foot pressure examination
was checked to verify the actual gait balance between
the affected and the unaffected sides. The evaluation
was implemented using the Gait analysis treadmill
from Zebris. The gait speed was 1.5km/h, and the
gradient was 4°. In the evaluation method, the reason
for the low slope rather than level ground is the
arbitrary setting for measuring the gait imbalance on
the ramp entry section as a problem mentioned in the
introduction. Fig. 9 shows the evaluation graph. As
shown in Fig. 9, it was verified that the ankle variable
hybrid prosthesis proposed in this study represents the
gait balance in comparison to the 3R80 passive type
above-knee prosthesis with the clearly fixed ankle.
Figure 9: Butterfly diagram of Existing prosthesis and
Prosthesis with proposed techniques.
A Preliminary Study of Ankle Variable Hybrid Above-knee Prostheses
793

This is because proper changes in the ankle joint
during gait have partially compensated for the bounce
role of the load reactor in the stance phase gait
trajectory in the gait of normal people. Also, it can be
attributed to the fact that the swing phase assisted
power to the movement of the knee joint.
4 CONCLUSIONS
In this study, a preliminary study was performed to
solve the gait imbalance of passive type prostheses
that occur on the entrance or low slope of the ramp,
through applying the ankle variable hybrid prosthesis
developed by the Korea Orthopedics & Rehabilitation
Engineering Center. As a result of the performance, it
was confirmed that only the variation in the ankle
showed the gait balance. The results confirmed that
even though the powered below-knee prosthesis was
not used, the gait balance was achieved in the hybrid
above-knee prosthesis. Thus, it has been confirmed
that this gait control can improve the convenience of
the users of above-knee prostheses. However, this is
the early stage of the study and is a lack of suggestion
of quantitative ankle joint resistances. Also, it still
requires further experimentations in a gait
environment with high slopes.
ACKNOWLEDGEMENTS
This research was supported by Basic Science
Research Program through the National Research
Foundation of Korea (NRF) funded by the Ministry
of Education (NRF-2017R1A2B2006958).
This research was supported by the Bio & Medical
Technology Development Program of the NRF
funded by the Korean government, MSIP (NRF-
2017M3A9E2063260).
This research was supported by the MSIT
(Ministry of Science and ICT), Korea, under the
ITRC (Information Technology Research Center)
support program (IITP-2018-0-01426) supervised by
the IITP.
REFERENCES
Dongfang Xu, Yanggang Feng, Jingeng Mai, and Qining
Wang, 2018. Real-Time On-Board Recognition of
Continuous Locomotion Modes for Amputees with
Robotic Transtibial Prostheses. IEEE Transactions on
Neural Systems and Rehabilitation Engineering,
Volume 26, Issue 10, pp 2015-2025.
WHO. 2018. World Report on Disability.
Steven Culver, Harrison Bartlett, Amanda Shultz, Michael
Goldfarb. 2018. A Stair Ascent and Descent Controller
for a Powered Ankle Prosthesis. IEEE Transactions on
Neural Systems and Rehabilitation Engineering, pp
993-1002.
Matthew L. Handford, Manoj Srinivasan, 2018. Energy-
Optimal Human Walking With Feedback-Controlled
Robotic Prostheses: A Computational Study. IEEE
Transactions on Neural Systems and Rehabilitation
Engineering, VOL 26, NO 9, pp 1773-1782.
Jinying Zhu, Qining Wang, Long Wang, 2014. On the
Design of a Powered Transtibial Prosthesis with
Stiffness Adaptable Ankle and Toe Joints. IEEE
Transactions on Industrial Electronics, Volume 61,
Issue 9, pp 4797-4807.
Kyle J. Kaveny, Ann M. Simon, Tommaso Lenzi, Suzanne
B. Finucane, Emily A. Seyforth, Graci Finco, Kasen L.
Culler, Levi J. Hargrove, 2018. Initial Results of a
Variable Speed Knee Controller for Walking with a
Powered Knee and Ankle Prosthesis. 2018 7th IEEE
International Conference on Biomedical Robotics and
Biomechatronics. Biorob, pp 764-769.
Elissa D. Ledoux and Michael Goldfarb, 2017. Control and
Evaluation of a Powered Transfemoral Prosthesis for
Stair Ascent. IEEE Transactions on Neural Systems
and Rehabilitation Engineering, vol 25, NO 7, pp 917-
924.
D. Quintero, D. J. Villarreal, D. Lambert, S. Kapp, and R.
D. Gregg, 2018. Continuous-phase control of a
powered knee-ankle prosthesis: Amputee experiments
across speeds and inclines. IEEE Transactions on
Robotics, vol. 34, no. 3, pp 686-701.
M. Bellmann, T. Schmalz, S. Blumentritt, 2010.
Comparative biomechanical analysis of current
microprocessor-controlled prosthetic knee joints. Arch.
Phys. Med. Rehabil., vol 91, no 4, pp 644–652.
B. Lawson, H. Varol, A. Huff, E. Erdemir, and M.
Goldfarb, 2013. Control of stair ascent and descent with
a powered transfemoral prosthesis. IEEE Trans. Neural
Syst. Rehabil. Eng., vol 21, no 3, pp 466–473.
B. E. Lawson, J. Mitchell, D. Truex, A. Shultz, E. Ledoux,
and M. Goldfarb, 2014. A robotic leg prosthesis:
Design, control, and implementation. IEEE Robotics &
Automation Magazine, vol 21, no 4, pp 70–81.
T. Lenzi, J. Sensinger, J. Lipsey, L. Hargrove, T. Kuiken,
2015. Design and preliminary testing of the RIC hybrid
knee prosthesis. 2015 37th Annual International
Conference of the IEEE Engineering in Medicine and
Biology Society, pp 1683-1686.
Han Liu, Mihaela Cocea, Weili Ding, 2017. Decision tree
learning based feature evaluation and selection for
image classification. International Conference on
Machine Learning and Cybernetics, pp569-574.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
794
