
Motor-less and Gear-less Robots: New Technologies for Service and
Personal Robots
Claudio Rossi
1 a
, William Coral
2 b
and Julian Colorado
3 c
1
Centre for Automation and Robotics UPM-CSIC, Madrid, Spain
2
Department of Mechatronics Engineering, Corporaci
´
on Universitaria del Huila, Colombia
3
School of Engineering, Pontificia Universidad Javeriana, Bogot
´
a, Colombia
Keywords:
Artificial Muscles, Smart Materials, Bio-inspired Robots.
Abstract:
In the last years, we have been working on exploring alternative actuation technologies for the future service
and personal robots. These shall allow designing lighter and safer robots, devoid of conventional mechanical
transmission mechanisms i.e. motor-less and gear-less robots. Here, we summarise our work with Shape
Memory Alloys. We show that, despite their known limitations, by finding suitable niches of application,
dedicated mechatronics design, and ad-hoc control strategies, SMAs can effectively be used as an alternative
actuation technology for robotic systems.
1 INTRODUCTION
The current state of the art on actuation technology is
essentially based on hydraulic/pneumatic and electro-
magnetic technology (servo-motors, gearboxes etc.).
Although current commercial actuators have reached
a notable degree of refinement, such technologies
have their foundations in the mid nineteenth century,
and still rely on the same basic principles. We be-
lieve that such technology faces several fundamental
limitations and may not be suited for the future gen-
erations of service robots. Future robots will come
out of the factories and work in close co-operation
with humans, in small workshops as well as in domes-
tic environments, as co-workers and home assistants
(see Box 1)
1
. In this context, it is difficult to imag-
ine a clockwork-like system made of several motors
and hundreds of gears. If the robotic device is to op-
erate in close relationship with humans, the safety of
the system will be a central issue. Furthermore, cur-
rent technology hardly allows creating robots whose
aspect (”look and feel”) can raise social acceptance.
The need for different actuators for safe human-
robot interaction is widely acknowledged. Currently,
a
https://orcid.org/0000-0002-8740-2453
b
https://orcid.org/0000-0002-3971-9536
c
https://orcid.org/0000-0002-6925-0126
1
Source of Box 1: Antonio Bicchi, University of Pisa,
URAI Conference, 2011
Box 1: Examples of new applications.
1
a growing research activity addressing this issue. In
fact, industrial robots need stiff actuators, (see Box
2)
2
. However, most of such systems still adopt classi-
cal mechanics technology, in complex mechanical de-
vices. As such, current robots are electro-mechanical
devices that are hard-bodied, usually heavy, bulky and
complex. In fact, even the most advanced robots move
in extremely clumsy and often dangerous ways.
In our view, a radical change in actuation technol-
ogy is essential for building the smaller, lighter, sim-
pler and safer robots that can share living and working
space with humans.
New actuation technology in functional or ”smart”
materials has opened new horizons in robotics actua-
tion systems. Materials such as piezo-electric fiber
composites, electro-active polymers and shape mem-
2
Source of Box 2: Raffaella Carloni, Univ. of Twente,
RoboNed Conference, 2011.
414
Rossi, C., Coral, W. and Colorado, J.
Motor-less and Gear-less Robots: New Technologies for Service and Personal Robots.
DOI: 10.5220/0007955004140421
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 414-421
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Box 2: Comparison between needs in industrial and new
robotics applications.
2
ory alloys (see Tab. 1) are being investigated as
promising alternatives to standard servomotor tech-
nology (Pons, 2005).
Recent research at out Laboratory, the Bioinspired
Systems Lab
3
of Centre for Automation and Robotics
UPM-CSIC, has focused on the use of SMAs for
building muscle-like actuators. SMAs are extremely
cheap, easily available commercially
4
and have the
advantage of working at low voltages.
SMAs are used in many different applica-
tion fields (M. Hashimoto et al., 1985),(Kurib-
ayashi, 1986),(Raynaerts and Brussel, 1991),(Ikuta,
1990),(Hunter et al., 1991),(Waram, 1993). They can
be used to generate and sense movement and even for
storing energy. Their applications cover many sector,
like, e.g., in deployable satellite antennas, sensors,
machinery, robotics to materials for the construction
of suspension bridges or anti-seismic devices.
SMAs are also being used in many non-invasive
surgery devices (Liu et al., 2011),(Hashimoto et al.,
1999),(Shi et al., 2011),(Ho et al., 2011),(Li et al.,
2006) and biomedicine, in devices such as stents and
tubular prosthetic devices.
In classical robotic systems, the use of SMAs
as linear actuators provides an interesting alternative
to the mechanisms used by conventional actuators.
SMAs allow to drastically reduce the size, weight
and complexity of robotic systems. In fact, their
large force-weight ratio, large life cycles, negligible
volume, sensing capability and noise-free operation
make possible the use of this technology for build-
ing a new class of actuation devices. Nonetheless,
high power consumption and low bandwidth limit this
technology for robotics applications.
In fact, due to such limitations, SMAs have not
raised the attention of the robotics technology for sev-
3
http://www.disam.upm.es/crossi/Bio Inspired Systems
Lab
4
NiTi (Nickel-Titanium) such as NiTinol
R
are the most
commonly commercially available SMAs.
eral years. Here, we claim that careful control de-
sign that takes into account the particular character-
istics of the material coupled with proper mechanic
design, significantly increases effectivity of SMAs as
robotics actuators. In fact, It has been demonstrated
that suitable control strategies and proper mechani-
cal arrangements can dramatically improve on SMAs
performance, mostly in terms of actuation speed and
limit cycles. Also, from the mechatronics point of
view, niches of applications can be found that greatly
benefit from this technology. Bio-inspired artificial
systems are one such niches.
It is clear, however, that SMAs (and smart mate-
rials in general) cannot, nowadays, be thought as a
universal substitute for classical servomotor technol-
ogy.
From our point of view, the limitations of SMAs
represented a challenge that needed to be addressed
from both mechatronics and control perspectives in
order to overcome these drawbacks.
Our work of the last years has demonstrated that
by (i) finding suitable niches of application, (ii) ded-
icated mechatronics design, and (iii) ad-hoc control
strategies, SMAs can effectively be used as an alter-
native actuation technology in a wide spectrum of ap-
plications and robotic systems.
Several other SMAs-based robotic systems have
been proposed in the literature that confirm our claim.
These will be described later in this Section.
One of the advantages of SMAs is that although
they are mostly used as actuators, they also have sens-
ing capabilities. Despite most of the SMAs physi-
cal parameters are strongly related in a nonlinear hys-
teresis fashion, the electrical resistance varies linearly
with the strain of the alloy. Because strain is kinemat-
ically related to the motion of the actuator (either lin-
ear motion or rotational), the electrical resistance and
the motion produced by the actuator are both linearly
related. This linear relationship between resistance
variation and motion is achieved because the marten-
site fraction is kinematically coupled to the motion,
and the martensite fraction is what drives the resis-
tance changes. This issue is an advantage for devel-
oping closed-loop position controllers that regulate
the SMAs actuation. In fact, most of the applica-
tions involving position linear control of SMAs, feed-
back electrical resistance measurements to estimate
the motion generated by the actuator. This avoids the
inclusion of external position sensors for closing the
control loop.
Motor-less and Gear-less Robots: New Technologies for Service and Personal Robots
415

Table 1: Main characteristics of functional materials.
Kind Variant Principle Pros Cons
Shape memory Shape Memory Alloys (SMAs) Electric current Price, availability small strain, speed
Magnetic Shape Memory (MSM) Electric field Contraction speed High power fields
Piezo-electric Direct Electric field Price, availability Small strain
Wave Electric field Price, availability
Electro-active Polymers Electronic Electric field Large strain High voltages
Ionic Electric field Large strain, low voltages Must be kept ”wet”
Figure 1: Microscopic viewpoint of the Shape Memory Ef-
fect.
1.1 SMAs Muscle-like Actuation for
Robotics
The use of SMAs as artificial muscles allows for more
”natural” actuation (Hunter and Lafontaine, 1992).
SMAs wires can act as muscle fibers. SMAs can pro-
vide an excellent actuation technology, in that they are
activated by electrical signals, have a large pull force
excellent strength-to-weight ratio.
We re fer the reader to (Coral et al., 2012) for a re-
view of the most representative robots and structures
that integrate SMAs as muscle-like actuation mecha-
nisms.
2 RECENT WORK AT THE
BIOINSPIRED SYSTEMS LAB:
iTuna, BR
3
AND BaTboT
In this section, we describe our recent results on two
SMAs-actuated bio-inspired robots. The iTuna and
the BR
3
are fish-like underwater robot whose main
feature is to use SMAs wires to bend the continuous
structure that constitutes the backbone of the fish. The
BaTboT is a Flapping Wings Micro Aerial Vehicle
(FWMAV) capable of changing its wings’ geometry
by means of SMAs-based muscles.
These prototypes have been conceived and de-
signed specially in order to exploit the particular fea-
tures of SMAs-based actuation. In fact, as mentioned
earlier, in order to make the best of SMAs-based ac-
tuation, we do not have to think at them as substi-
tute of other actuation techniques in already existing
mechanical setups. Specific application niches and
mechanical needs exist where SMAs are not only a
valid alternative, but even outperform classical actua-
tion means.
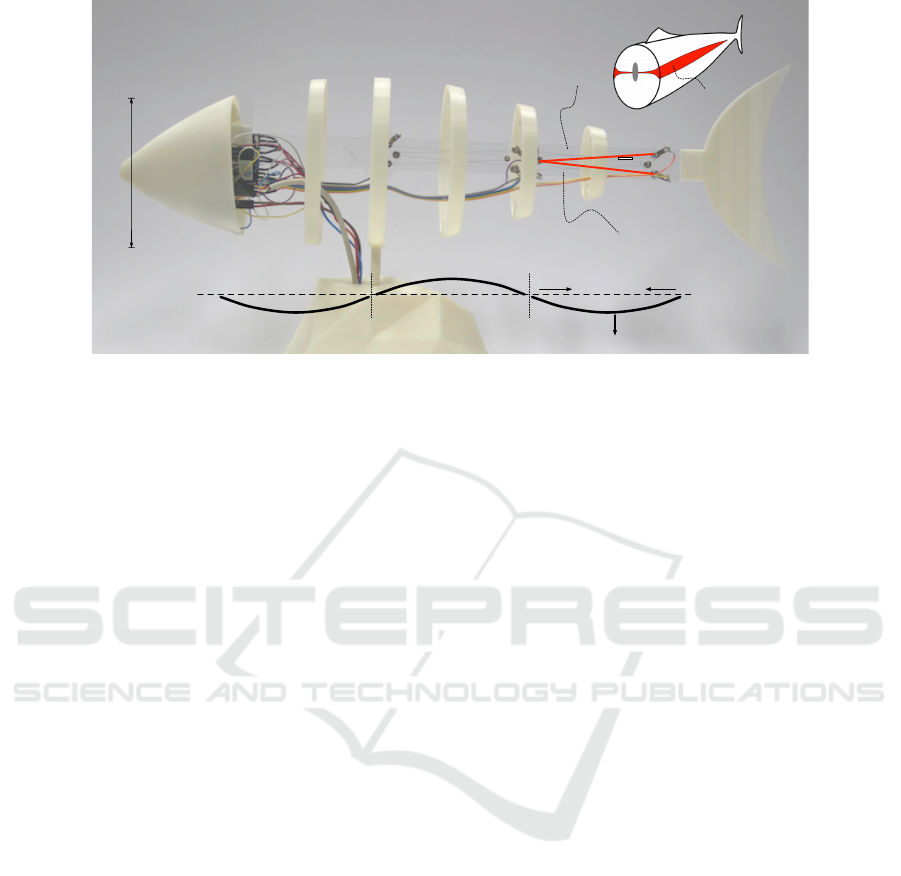
2.1 iTuna: A Bending Structure
Swimming Robotic Fish
The iTuna (Rossi et al., 2011) is a swimming fish-like
robot imitates some key features fish biomechanics.
Its actuation system takes inspiration from the ar-
rangement of the red or slow-twitch muscles. In real
fishes, such muscles are used for bending their flex-
ible backbone. Alike, the main mechnical structure
of the iTuna robot is a continuous flexible backbone,
composed of polycarbonate of 1mm thickness.
Three antagonistic pairs of SMAs-based actuators,
parallel to the body produce the independent bending
of three body segments of 8.5cm length. This actua-
tion is similar to the one produced by fish red mus-
cles. This antagonistic configuration of the SMAs
wires has the advantage that both directions of mo-
tion (contraction and elongation) can be actively con-
trolled.
In the iTuna, NiTi SMAs wires with a diameter
size of 150µm were adopted. These have a pull force
of 230grams − f orce at consumption of 250mA at
room temperature, and a nominal contraction time of
1 second.
Under nominal operation such SMAs could bend
the body segments up to 28 degrees, even if SMAs
wires only contract approximately 4% of their length.
By increasing the input electrical current and includ-
ing a suitable control that handles the overheating of
the SMAs, contraction time of 0.5s was achieved, and
strain could be increased up to 6%.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
416
SMA Wire
1mm thick
polycarbonat
e backbone
Red muscles
Figure 2: Main structure of the iTuna robot fish.
2.1.1 SMAs Control in the iTuna
In order to address the two main limitations of SMAs
(slack in the fibers, and limited actuation speed) we
deigned a low-level PID controller. Slack issues are
due to a two-way memory effect during operation
(Featherstone, 2008), while actuation speed is limited
by to the switching time between cooling and heating
phases. To address the first problem, a pre-heating
mechanism was developed. The pre-heating prevents
the inactive alloys from complete cooling, thus short-
ening the heating phase (fiber’s contraction). Addi-
tionally, the antagonistic arrangement provides an ex-
ternal stress to the cooling wire by the active antag-
onistic wire, that sums to the stress provided both by
the elastic backbone. Working with an already-warm
wire allows for a faster stretch and slack issues are
avoided. Resistance measurements were used as a
feedback signal for closed-loop control. We refer the
reader to (Rossi et al., 2011) and (Rossi et al., 2010)
for more details.
The control developed also allowed overloading
the SMAs with up to 350mA peak current accelerating
the heating phase, but preventing it from overheating
that could cause physical damage of the SMAs. Over-
loading has allowed for achieving a 1Hz oscillation
time (i.e. 0.5 seconds contraction and cooling times)
and a bending angle of 36 degrees of each body seg-
ment.
The iTuna experience showed that an ad-hoc
mechatronics design and a suitable control (together
with a deeper understanding of the SMAs physics) al-
low taking advantage of SMAs and overcoming some
of their limitations.
2.2 Black Bass: The Evolution of iTuna
Then a second version of iTuna was created under
the name ”Bioinspired and Biomimetic Black Bass
Robot” (BR
3
) (Coral et al., 2018). This was based on
a new design, but still used to move the same working
principle of iTuna. It also included many significant
improvements related to mechatronic design and con-
trol algorithms. The main purpose was to get closer
to a commercial version of a robot fish that could be
used in the agro-alimentary sector. The robotic bass is
inspired by the Sea Bass due to its relevance because
this is the second most important species (in produc-
tion volumes) in Mediterranean aquaculture.
Similarly with the iTuna, the BR3 has a back-
bone made of flexible polycarbonate structure of 1
mm thick and 263 mm long, but it differs from it since
it has two rectangular holes along where the SMAs
are located. This allows us to reduce the effective
cross section of the structure by 50%, thus reducing
the force required to bend it and optimizing the force
made by the SMAs. These holes also prevent SMAs
from overstretching when the backbone is bent. Con-
sidering that the SMAs only contract 4% of their total
length, this overstretching causes the loss of contrac-
tion for which the bending angle is smaller and con-
sequently the thrust will be smaller. For this reason
these holes were one of the great improvements in the
BR3 with respect to the iTuna. Another of the im-
provements to the backbone was to include 20 spines
along the structure that support the solid ribs that were
printed using ABS plastic. These ribs increase the
mass of the robot and provide support to the skin al-
lowing obtain smoother body curves.
In order to obtain more precise bending angle
measurements, the BR
3
was equipped with four flex
sensors (see Fig. 3) distributed along the backbone.
Motor-less and Gear-less Robots: New Technologies for Service and Personal Robots
417
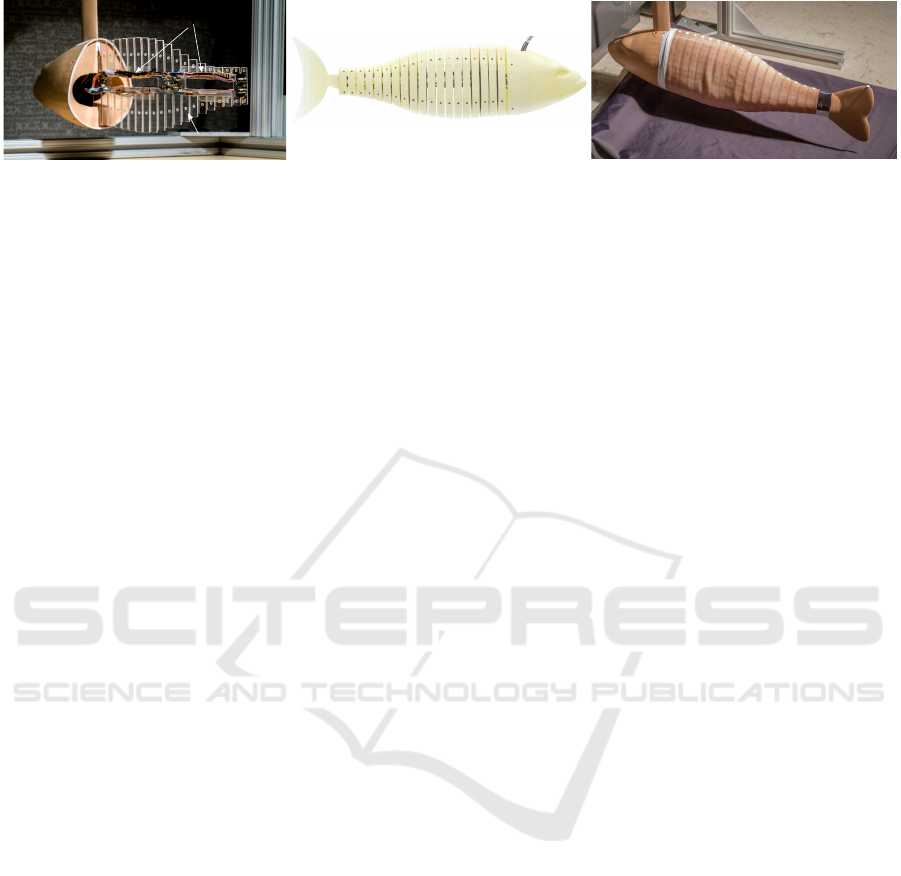
Flex Sensors
Backbone
Figure 3: Left: Backbone and flex sensor used to control the bending angle and frequency; Centre: Complete structure
printed with a 3D printer and ABS plastic; Right: Complete structure wearing our own fabricated microfiber lycra mesh
between two silicone layers, that we called skin.
These provide a less noisy signal with respect to the
current sensors used in the iTuna to compute SMAs
contraction. Current sensors were also used in the
BR
3
as a safety measure to prevent high currents on
the SMAs and avoid damaging them. Due to the use
of flex sensors the control of the SMAs is now based
on the measurement of the bending. Thus in the BR
3
we have a high level control that generates the swim-
ming patterns and a low level control that measures
the bending of the backbone and controls the amount
of electric current that is sent to the SMAs.
In order to determine if the BR3 can trace an accu-
rate trajectory we have tested in three different config-
urations: Air/Backbone without ribs, Air/Backbone
Ribs and Skin, and Water/Backbone Ribs and Skin.
For each one we set different amplitude and frequency
values. Figure 4 shows one of these tests including the
thrust generated by the fish in the water. We made a
Particle Tracking Visualisation (PTV) to trace the tra-
jectory of the tail by using a reference spot placed at
the top of the tail.
2.3 BaTboT: a Biologically-inspired
Bat-like Aerial Robot
BaTboT was one of the first a bio-inspired bat robot
that SMAs as artificial muscles for changing the ge-
ometry of the wings (Colorado et al., 2012). Wing ge-
ometry control is what makes biological bats capable
of extremely agile maneuvering at low flight speed.
Biological studies (Swartz et al., 2005), (Hedenstr
¨
om
et al., 2009), (Iriarte-D
´
ıaz et al., 2011), (Riskin et al.,
2010) have revealed that real bats are able to maneu-
ver because of the inertial forces and torques pro-
duced by the changing the wings’ shape during flap-
ping. Such features are highly desirable in Micro
Aerial Vehicles (MAVs).
With the BaTboT project we attempted to mimic
bats maneuvering system, reproducing the bio-
mechanical design of the wings, and tackling the chal-
lenge of controlling their shape. In Micro Aerial Vehi-
cles, the weight of the components is clearly a critical
issue. This is why ”classical” actuation technologies
were considered not suitable for the purpose. SMAs
were adopted because of their extremely low (actually
negligible) weight, and high force-to-weigh ratio.
In the BaTboT, the SMAs actuators used are the
commercial Migamotor NanoMuscle model RS-70-
CE (Migamotors, 2019). Each NanoMuscle consists
of several short strips of SMAs NiTi wire with a
thickness of 150µm attached to opposite ends of six
metal strips stacked in parallel. Each SMAs segment
pulls the next strip about 0.67mm relative to the pre-
vious strip, and the relative movements sum to make
a stroke of 4mm. Two Migamotors muscles have been
arranged into an antagonistic configuration working
as artificial biceps and triceps that provide the rota-
tion motion of the wing elbow’s joint. The range of
motion of the joint is about 60
◦
. Figure 5 shows the
detail of the BaTboT’s wing.
In (Colorado et al., 2012) we presented the proto-
type and the results of the experiments carried out, fo-
cused at evaluating the use of SMAs as artificial mus-
cles to change of wing’s morphology. Simulations
and experiments wern carried out aimed at quantify-
ing the Power-to-Force tradeoff of the SMAs muscles
working under two operation modes: nominal and
overloaded. Nominal-mode implies an input heating
current between 175mA and 350mA, and overloaded-
mode, between 400mA and 600mA.
AS for the iTuna, overloading allows for reducing
the heating-time of the SMAs, therefore increasing
the contraction speed and the overall actuation fre-
quency. Again, overloading was monitored to avoid
overheating issues that could cause physical damage
of the fibres.
In the work presented in (Colorado et al., 2012),
we also investigated SMAs fibers fatigue issues, and
how overloading can accelerate their appearance,
which causes a loss of performances as far as both
pull force and contraction speed is concerned. We
found that after approximately 5 minutes of contin-
uum SMAs overloaded operation, actuation speed
drastically decreases about 56%. This limitations in
SMAs bandwidth conducted us to investigate how to
achieve Batbot maneuvers while flapping and morph-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
418

Time, s
110 115 120 125 130 135
Force, grams-force
-60
-40
-20
0
20
40
60
Swimming force
Figure 4: Carangiform swimming pattern for Top left:Air/Backbone without ribs at 0.34Hz and amplitude 5 degrees; Top
right:Air/Backbone Ribs and Skin 0.6Hz and amplitude 20 degrees; Bottom left:Water/Backbone Ribs and Skin 0.6Hz and
amplitude 10 degrees; Bottom right:Thrust at 1Hz and amplitude 10 degrees.
......
shoulder joint
elbow joint
wrist joint
leg
SMA actuators
3D-printed structure
and bones
On-board electronics:
(battery, IMU, SMA power
drivers, microcontroller)
10 cm
digits
0.1 mm thick
silicone membrane
Figure 5: BaTboT mechatronics compared to its biological counterpart.
ing the wings at low frequencies. In fact, some bats
are able to achieve both lifting and inertial forces by
just modulating wing inertia, thus, undergoing large
body accelerations. Since bat’s wings have heavy
muscles and bones, the inertial effect plays a signif-
icant role in a bats flying maneuvers, even more im-
portant than aerodynamic forces.
In (Colorado et al., 2013), we developed a novel
inertial-based controller to properly modulate wing
inertia to generate attitude movements. We inves-
tigated how to achieve forward and turning flight
maneuvers by just flapping and morphing BatBot’s
wings at 2Hz. Wind tunnel experiments showed that
net body forces increased about 23% thanks to the
bio-inspired contraction and extension of both wings
during a wingbeat (morphing modulation). More im-
portantly, thanks to the inclusion of inertial informa-
tion of both wings within the control law, causing that
the upstroke portion of the wingbeat cycle generates
more lift and less drag due to the fact that the elbow
joint contracts sufficiently to reduce the wing area at
minimum span. Figure 6 shows experimental results
supporting these conclusions.
Motor-less and Gear-less Robots: New Technologies for Service and Personal Robots
419
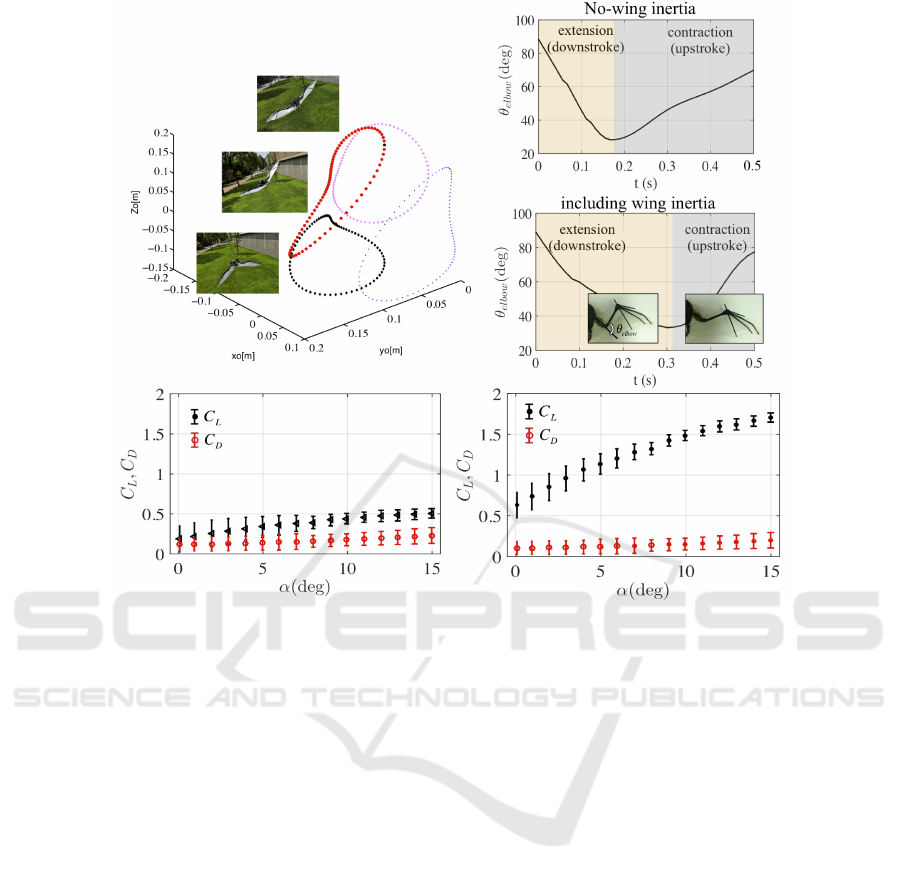
Figure 6: Different wing modulation profiles and their effect in lift and drag generation: Top Left: forward-turning maneuver
including wing-tip Cartesian trajectories. Top right: The plots detail wing contraction/extension during a wingbeat cycle. In
the upper plot, the wing inertial model is not considered, thus, the controller is not capable to compensate the drag payload of
the wings during the upstroke. In the lower plot, the upstroke time is reduced thanks to the inertial effect included. Bottom
left: lift and drag forces generated with the wing modulation from the upper plot in Top right:, wheres Bottom right: shows
lift and drag forces generated with the modulation from the lower plot in Top right:. As a result, lifting forces are tripled.
3 CONCLUSIONS
New generations of service and personal robots will
need new actuation technologies.
In our work, we have investigated the use of Shape
Memory wires as linear actuator for this purpose. Our
work has demonstrated that by
• Designing dedicated mechatronics
• Deepening the understanding of their physical be-
havior
• Developing ad-hoc control strategies
SMAs can provide an effective technology that allows
building simpler and lighter robots. Such features
that may contribute to their safety, and ultimately al-
low robots to share living and working space with hu-
mans.
Even if SMAs cannot substitute classical servo-
motor and hydraulic technology in general, we have
shown that they can effectively compete with, and
even outperform standard actuation technology.
We have also shown that, cleverly designed con-
trol strategies, that exploit the knowledge of the
physics of the material and of its behavior over time,
together with dedicated mechanic setups can help
overcoming their limitations.
We ha also found that, while some of the limita-
tions of the SMAs can be overcome, another limita-
tion, such as fatigue is seldom considered in the litera-
ture, an shall be further investigated in order to obtain
the best performance.
In conclusion, we can say that Shape Memory
Alloys, and functional materials in general, have a
great potential to be used in future robotic systems,
although they need to be investigated more. In com-
parison with electric motors and hydraulic actuators,
that have more than a century of history, functional
materials are still in their infancy.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
420

ACKNOWLEDGEMENTS
The research leading to these results has re-
ceived funding from RoboCity2030-DIH-CM Madrid
Robotics Digital Innovation Hub (”Rob
´
otica aplicada
a la mejora de la calidad de vida de los ciudadanos.
fase IV”; S2018/NMT-4331), funded by ”Programas
de Actividades I+D en la Comunidad de Madrid” and
cofunded by Structural Funds of the EU.
REFERENCES
Colorado, J., Barrientos, A., Rossi, C., and Breuer, K.
(2012). Biomechanics of smart wings in a bat robot:
morphing-wings using SMA actuators. Bioinspiration
& Biomimetics.
Colorado, J., Barrientos, A., Rossi, C., and Parra, C. (2013).
Inertial attitude control of a bat-like morphing-
wing air vehicle. Bioinspiration & Biomimetics,
8(1):016001.
Coral, W., Rossi, C., Colorado, J., Lemus, D., and Barri-
entos, A. (2012). Sma-based muscle-like actuation in
biologically inspired robots: A state of the art review.
In Berselli, G., Vertechy, R., and Vassura, G., editors,
Smart Actuation and Sensing Systems, chapter 3. Inte-
chOpen, Rijeka.
Coral, W., Rossi, C., Curet, O. M., and Castro, D. (2018).
Design and assessment of a flexible fish robot actuated
by shape memory alloys. Bioinspiration & biomimet-
ics, 13(5):056009.
Featherstone, R. (2008). An Architecture for Fast and
Accurate Control of Shape Memory Alloy Actua-
tors. The International Journal of Robotics Research,
27(5):595–611.
Hashimoto, M., Tabata, T., and Yuki, T. (1999). Develop-
ment of electrically heated SMA active forceps for la-
paroscopic surgery. IEEE International Conference
on Robotics and Automation Cat No99CH36288C,
3(May):2372–2377.
Hedenstr
¨
om, A., Johansson, L. C., and Spedding, G. R.
(2009). Bird or bat: comparing airframe design
and flight performance. Bioinspiration biomimetics,
4(1):015001.
Ho, M., McMillan, A. B., Simard, J. M., Gullapalli,
R., and Desai, J. P. (2011). Toward a Meso-
Scale SMA-Actuated MRI-Compatible Neurosurgical
Robot: Robotics, IEEE Transactions on. Robotics
IEEE Transactions on, PP(99):1–10.
Hunter, I. W. and Lafontaine, S. (1992). A comparison of
muscle with artificial actuators. In SolidState Sensor
and Actuator Workshop 5th Technical Digest IEEE,
pages 178–185.
Hunter, I. W., Lafontaine, S., Hollerbach, J. M., and Hunter,
P. J. (1991). Fast reversible NiTi fibers for use in mi-
crorobotics. In Micro Electro Mechanical Systems,
pages 166–170. Ieee.
Ikuta, K. (1990). Micro/miniature shape memory alloy ac-
tuator. In International Conference on Robotics and
Automation, volume 3, pages 2156–2161. IEEE Com-
put. Soc. Press.
Iriarte-D
´
ıaz, J., Riskin, D. K., Willis, D. J., Breuer, K. S.,
and Swartz, S. M. (2011). Whole-body kinematics
of a fruit bat reveal the influence of wing inertia on
body accelerations. Journal of Experimental Biology,
214(Pt 9):1546–1553.
Kuribayashi, K. (1986). A New Actuator of a Joint Mecha-
nism Using TiNi Alloy Wire. The International Jour-
nal of Robotics Research, 4(4):47–58.
Li, W. D., Guo, W., Li, M. T., and Zhu, Y. H. (2006). Design
and Test of a Capsule Type Endoscope Robot with
Novel Locomation Principle. 2006 9th International
Conference on Control Automation Robotics and Vi-
sion, 20(02):1–6.
Liu, X., Luo, H.-Y., Liu, S.-P., and Wang, D.-F. (2011). Pilot
study of SMA-based expansion device for transanal
endoscopic microsurgery. In 2011 International Con-
ference on Machine Learning and Cybernetics, pages
1420–1424. IEEE.
M. Hashimoto, Takeda, M., Sagawa, H., Chiba, I., and Sato,
K. (1985). Application of shape memory alloy to
robotic actuators. J. of Robotic Systems, 2(1):3–25.
Migamotors (2019). Migamotors Company, 2012, Avali-
able from: http://www.migamotors.com/.
Pons, J. L. (2005). Emerging Actuator Technologies: A Mi-
cromechatronic Approach. Wiley.
Raynaerts, D. and Brussel, H. V. (1991). Development of a
SMA high performance robotic actuator. In Fifth In-
ternational Conference on Advanced Robotics Robots
in Unstructured Environments, pages 61–66. Ieee.
Riskin, D. K., Iriarte-D
´
ıaz, J., Middleton, K. M., Breuer,
K. S., and Swartz, S. M. (2010). The effect of body
size on the wing movements of pteropodid bats, with
insights into thrust and lift production. Journal of Ex-
perimental Biology, 213(Pt 23):4110–4122.
Rossi, C., Colorado, J., Coral, W., and Barrientos, A.
(2011). Bending continuous structures with SMAs :
a novel robotic fish design. Bioinspiration biomimet-
ics, 045005(4):045005.
Rossi, C., Coral, W., and Barrientos., A. (2010). SMA Con-
trol for Bio-mimetic Fish Locomotion. In Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics (ICINCO), Madeira.
Shi, Z., Liu, D., Ma, C., and Zhao, D. (2011). Accurate con-
trolled Shape Memory Alloy Actuator for Minimally
Invasive Surgery. Self, pages 817–822.
Swartz, S. M., Bishop, K. L., and Ismael-Aguirre, M. F.
(2005). Dynamic complexity of wing form in bats:
implications for flight performance. Functional and
evolutionary ecology of bats, pages 110–130.
Waram, T. (1993). Actuator Design Using Shape Memory
Alloys. T.C. Waram.
Motor-less and Gear-less Robots: New Technologies for Service and Personal Robots
421
