
Miniature Autonomy as One Important Testing Means in the
Development of Machine Learning Methods for Autonomous Driving:
How ML-based Autonomous Driving could be Realized on a 1:87 Scale
Tim Tiedemann, Jonas Fuhrmann, Sebastian Paulsen, Thorben Schnirpel, Nils Sch
¨
onherr,
Bettina Buth and Stephan Pareigis
Department CS, University of Applied Sciences Hamburg, Berliner Tor 7, Hamburg, Germany
Keywords: Autonomy, Autonomous Driving, System Level Tests, Machine Learning, Mobile Robots.
Abstract:
In the current state of autonomous driving machine learning methods are dominating, especially for the envi-
ronment recognition. For such solutions, the reliability and the robustness is a critical question.
A “miniature autonomy” with model vehicles at a small scale could be beneficial for different reasons. Ex-
amples are (1) the testability of dangerous and close-to-crash edge cases, (2) the possibility to test potentially
dangerous concepts as end-to-end learning or combined inference and learning phases, (3) the need to opti-
mize algorithms thoroughly, and (4) a potential reduction of test mile counts.
Presented is the motivation for miniature autonomy and a discussion of testing of machine learning meth-
ods. Finally, two currently set up platforms including one with an FPGA-based TPU for ML acceleration are
described.
1 INTRODUCTION
Autonomous driving (AD) is a research topic for
several decades now. The dominating methods for
the subtask of environment recognition changed from
classical pattern recognition to methods using ma-
chine learning (ML) and in the past years specifically
to proposals based on deep learning (DL). Especially
with such methods it is often not clear how robust
they will work if rolled out on the streets. New so-
lutions/methods can be tested at first in simulations
and/or with recorded data, followed by first real world
tests on non-public test tracks, and finally on pub-
lic streets. This can be done component-wise (soft-
ware, electronics, mechanical components), for a set
of components, or for a whole system.
However, AD is a complex problem, especially as
the environmental variations are huge. The test of
new methods needs to cover a large number of dif-
ferent traffic situations to ensure proper functioning
when brought to market. Therefore, often malfunc-
tioning is recognized after thousands of test miles in
public traffic. For a safety critical system that is not
acceptable according to the relevant standards, e.g.
ISO 26262. Thus, further means to ensure the overall
system safety are required.
One further testing means in addition to simula-
tions and real-world tests are tests using model vehi-
cles. Such tests are also carried out in competitions,
e.g., the Carolo Cup for vehicles on a 1:10 scale (Zug
et al., 2014). We propose an even more miniaturized
setup with vehicles on a scale of about 1:87. This
has some advantages: One point is that at this scale
there are several off-the-shelf components available
for vehicles and for the environment, as it is used for
model railways. Moreover, existing model railway se-
tups can be used for testing. For example, we use
the Miniatur Wunderland in Germany for tests (Wun-
derland, 2019). Another important advantage are the
high demands of a more miniaturized vehicle: by
this additional challenge not only electronics and me-
chanics need to be optimized but also the algorithms
used for advanced driver assistance systems (ADAS)
and autonomous driving (AD). Especially ML-based
methods which might be used on standard PC hard-
ware without thinking about, need to be checked care-
fully and revised when run on a miniature autonomy
setup.
The option of using model vehicles instead of real
cars or simulations gives some interesting advantages:
• First physical tests can be carried out before fin-
ishing or even starting vehicle design.
• Unusual or even dangerous i.e. close-to-crash sit-
Tiedemann, T., Fuhrmann, J., Paulsen, S., Schnirpel, T., Schönherr, N., Buth, B. and Pareigis, S.
Miniature Autonomy as One Important Testing Means in the Development of Machine Learning Methods for Autonomous Driving: How ML-based Autonomous Driving could be Realized on
a 1:87 Scale.
DOI: 10.5220/0007955704830488
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 483-488
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
483

uations can be tested (edge cases).
• The differences between model setup and model
environment on the one hand and the real vehi-
cle, sensors, and environment on the other hand
are actually not an issue. This is, because the
lower level sensor processing (object detection,
range measurement, etc.) needs to be tested sep-
arately, anyways. One more critical problem in
many close-to-crash situations or accidents is the
higher layer where, e.g., sensor readings of differ-
ent modalities are fused, and/or sensor readings
are interpreted. Tests of these higher levels are
supposed to be performable on a miniature scale,
too.
• To test ML-based solutions that combine learning
and inference/recall in the application on the vehi-
cle, miniature models are preferable. The effect of
learning on a vehicle, after roll-out is hard to esti-
mate and even if combined with additional safety
means this can be a dangerous step on real vehi-
cles.
• Finally, running many miniature model vehicles
in a miniature environment 24/7 might be a means
to reduce the number of test miles needed later on
the real vehicles.
This paper presents first ideas for such a testing
concept. The following section discusses general as-
pects of testing autonomous driving solutions using
ML-based algorithms with regard to currently valid
standards. The currently employed hardware plat-
forms are described in section 3. Specific aspects re-
lating to the FPGA-based ML acceleration are pre-
sented in section 4. The paper closes with considera-
tions concerning the next steps and a short summary.
2 TESTING OF MACHINE
LEARNING BASED
AUTONOMOUS DRIVING
METHODS
As, e.g., Koopman et al. point out “it is more impor-
tant than ever to understand the gaps between theory
and practice in automotive computer-based system
safety” (Koopman, 2018). According to ISO 26262
(see, e.g., (Gebhardt et al., 2013)) design, verifica-
tion and validation activities should relate to the Auto-
motive Safety Integrity Level (ASIL). Typical valida-
tion acitivities comprise hardware-software integra-
tion tests, system integration tests, system tests. All
of these levels need to take into account the respec-
tive functional safety requirements as well as func-
tional correctness and general dependability require-
ments. Typically, test approaches include analysis
techniques as well as dynamic tests. Complex sys-
tems require a well-defined test concept, which of-
ten includes Hardware-In-The-Loop (HIL) as well as
Software-In-the-Loop (SIL) phases. A general deci-
sion is whether dynamic tests should be performed on
the target computer or whether an emulator or simu-
lator provides a sufficiently realistic environment for
the components to be tested. The use of emulators
or simulators may require additional qualification of
the software tools employed. For each requirement,
it needs to be decided whether the tests performed in
the simulation environment need to be rerun on the fi-
nal target hardware (see, e.g., (Rierson, 2013) for tool
qualification in the aviation context of DO-178C). It
is generally acknowledged that some types of errors
can not be detected in a simulation.
For autonomous driving, the usual assumption that
low-level components are individually tested, may not
hold. AI-based learning methods are not suitable
for traditional testing, e.g., typical requirements relat-
ing to code coverage or even requirements coverage
are not easily applicable for the resulting neural net-
works.
Typical test approaches e.g. for obstacle detection
or in general picture recognition divide the available
input data into training and test sets. The training set
is used to learn the respective data and the pictures
from the test set are then used to validate the learn-
ing success. The data acquisition thus is a critical part
for the validity of the resulting algorithm. There re-
mains an uncertainty with regard to situations not rep-
resented in the original training or test data.
System level tests on the other hand may not be
feasible in a realistic setting – i.e. on the road –
due to general restrictions for non-certified vehicles.
The current approach comprises prototypical situa-
tions due to driving in non-critical areas for as long
as possible.
We propose a testing concept which exceeds sim-
ple simulation, but allows for a far more controlled
environment configuration than the final prototype by
using miniature vehicles. This test level should be ad-
ditional to the usual tests of components, integration
and systems tests and should focus on critical situ-
ations, which are not easily reproducible in realistic
settings. Similar to the use of emulators or simulators
we expect additional efforts for the validation of the
miniature vehicles. The benefit for this additional ef-
fort should be a very controlled setting especially for
robustness tests and fault injections, which may not
be possible for the final system itself. This approach
requires a thorough risk analysis approach especially
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
484

for those scenarios relating to safety critical situations
due to autonomous decisions. Ideally this analysis
would also provide additional test cases for compo-
nent tests - but this is not the primary objective.
3 MINIATURE VEHICLES
In the computer science department of HAW Ham-
burg various autonomous model vehicles have been
developed and built for use in research and teaching
in the last 10 to 15 years. In particular, students of
HAW have been participating in students competi-
tion Carolo-Cup which is held each February at TU
Braunschweig (see for example (Nikolov, 2009) and
(Braunschweig, 2019)). Model vehicles of scale 1:10
had to be constructed for this competiton. The minia-
ture vehicles (scale smaller than 1:10) described in
this article have been developed based on the follow-
ing preliminary requirements:
• explore miniaturization of autonomous systems
• develop small and cheap autonomous systems for
teaching and further research
• be able to use Miniatur Wunderland Hamburg as
autonomous driving test area (Wunderland, 2019)
• exploit and study miniaturization of machine
learning hardware
In this article two different miniature autonomous ve-
hicles shall be de described.
3.1 Autonomous Vehicle Type 1: Sedan
Car
The type 1 vehicle is designed as a sedan car on a
scale of 1:63 (see Figure 1, left). It is equipped with
2 degrees of freedom (parallelogram steering), a cam-
era, an ESP32 micro controller board and a battery
with charging circuit.
A custom design of the vehicle frame, chassis and
parallel steering was made and printed out on a 3D
printer. As a result, the development of a precise
steering using a linear servo and a precise drive using
a micro transmission was possible. This overcame the
downside of electric toy cars with their for this pur-
pose insufficient mechanics.
The current control algorithms cover lane detec-
tion, lane following, and obstacle detection in a clas-
sical, image based non-ML-based fashion. A wide
angle lens for the camera is used to enlarge the visi-
ble area of the camera. Images are transformed into
world coordinates using a dynamic region of inter-
est and fixed point calculation to reduce the necessary
computational power. Lane detection is performed in
the transformed image using scan lines and intelligent
search algorithms. Obstacle detection is included in
the method. Lane following is achieved using a pure
pursuit algorithm (Coulter, 1992) (Nikolov, 2009).
The vehicle drives autonomously on a parcours simi-
lar to the one used at the student competition for au-
tonomous model cars in scale 1:10 Carolo-Cup at TU
Braunschweig (Braunschweig, 2019). The roadway
consists of a black floor which has white road mark-
ing attached. Battery lasts for about 9 minutes.
A telemetry application has been developed which
is used for easy remote access via WLAN to the vehi-
cle. In particular this is currently used for parameter
tuning and observation of the camera image.
Experiments in Miniatur Wunderland have not yet
been made at this point.
In the future, image data could be collected via the
telemetry application to feed off-site ML algorithms.
It is planned to recall the object recognition obtained
in this way on the miniature truck (vehicle type 2)
which contains an FPGA-based ML acceleration for
this purpose.
3.2 Autonomous Vehicle Type 2: Truck
For the computation of ML-based algorithms hard-
ware acceleration and, thus, more space is needed.
For that reason a second platform (“type 2”) is de-
signed which corresponds to a truck with trailer on
a scale of 1:87 (see Figure 1, right). Also for this
platform, as testing environment the commercial 1:87
scale model railroad Miniatur Wunderland (1,490 m
2
layout size, see Figure 2) is planned to be used (Wun-
derland, 2019).
The “truck” platform consists of an off-the-shelf
1:87-scale truck chassis and a 3D-printed body. It will
be equipped with a custom printed circuit board carry-
ing a Xilinx Zynq 7030 FPGA. This FPGA provides
enough computational power to implement machine
learning methods, at least in a limited way (see sec-
tion 4).
Planned sensors on the truck platform 2 are a cam-
era, multiple distance sensors Sharp GP2Y03E and an
Inertial Measurement Unit (IMU) MPU-9255. To be
able to relate sensor performances on the miniature
vehicle to typical sensor performances on real-world
vehicles and to estimate performances on real vehi-
cles, comparisons and calibrations are needed. For
the IMU a method proposed by Tedaldi et al. is used
and compared with other approaches (Tedaldi et al.,
2014). The small IMU in the vehicle is compared with
a XSens MTi-300 AHRS.
Miniature Autonomy as One Important Testing Means in the Development of Machine Learning Methods for Autonomous Driving: How
ML-based Autonomous Driving could be Realized on a 1:87 Scale
485

Figure 1: Left: Autonomous miniature vehicle type 1 (“sedan”, small), right: Autonomous miniature vehicle type 2 (“truck”,
large). The latter is designed to carry an FPGA board while the former is controlled by an ESP32 micro controller.
Figure 2: Sample view on the Miniatur Wunderland model
railroad on a scale of 1:87. Parts of the 1,490 m
2
lay-
out could be used for tests (Wunderland, 2019; Tiedemann,
2019, under CC-BY 4.0).
Figure 3: On the miniature “truck” vehicle a custom FPGA
board with a Xilinx Zynq 7030 will be used to enable the
application of ML methods on the vehicle. The board is
currently planned with a size of approximately 38 mm ×
84 mm. Off-the-shelf boards can not be used because of
space limitations. While the first ML tests did not use
FPGA-external memory (see section 4) the custom board
will include DDR memory (size not fixed yet).
4 FPGA-BASED ML
ACCELERATION
For the computation of ML-based algorithms on mo-
bile compact and power critical hardware an opti-
mized hardware design is needed. While standard
micro controllers have a very low power consump-
tion and a high single-thread performance, their com-
putational performance on parallel/SIMD tasks like
needed in machine learning is rather poor (Schenck
et al., 2017). A low-power FPGA with an optimized
design can lead to a much better computational per-
formance with an acceptable power consumption.
To support different types of ML methods a gen-
eral design is advantageous. One proposal was pub-
lished by Google and called “Tensor Processing Unit”
(TPU) (Jouppi et al., 2017). A comparable de-
sign on a Zynq FPGA was proposed by Fuhrmann
(Fuhrmann, 2018) and tested on a commercial off-the-
shelf board.
The test application for the first implementation
was the MNIST data set of handwritten digits (Le-
Cun et al., 1998; Lecun et al., ). The computation
of small 14×14 matrices on the FPGA (without using
FPGA-external memory) was about five times com-
pared to a computation on a Intel Core i5-5287U –
however, with reduced precision (Fuhrmann, 2018).
If the resulting additional error is acceptable is highly
dependent on the application and needs to be studied.
Therefore, the next step is a test setup that uses the
FPGA-based ML accelerator to classify street signs.
This is the milestone for a first ML application on a
1:87 miniature vehicle.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
486
5 CURRENT STATE AND NEXT
STEPS
Currently, the sedan setup is finalized and for the
truck a custom FPGA board is designed. The sen-
sors are being calibrated, starting with the IMU and
with the method proposed by Tedaldi et al. (Tedaldi
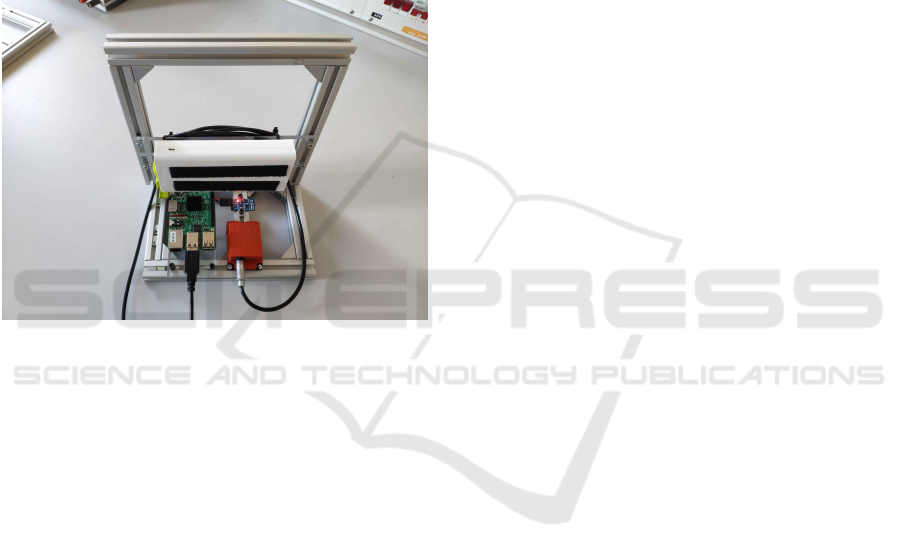
et al., 2014). Figure 4 shows the IMU calibration
setup including data logging system and power sup-
ply to be able to carry out different movements with-
out the need for any external cables. For the Sharp
distance sensors an evaluation with a Lidar-generated
map is prepared.
Figure 4: IMU test frame. The orange block is the XSens
reference IMU, the MPU-9255 device under test IMU is
mounted on the small blue printed circuit board.
When the setup has been sufficiently completed, a
feasibility study for using the FPGA-based ML ac-
celerator in combination with a vehicle is planned.
This will include further considerations regarding the
test of traffic sign detection both for a hard-wired net
which has been trained beforehand and a version ac-
tively learning during and improving during the test
phase. This phase should provide insight, e.g., in the
ability of the setup to react to exceptional situations
not provided during the learning phase as well as in
the benefits of capturing exceptional situations during
the driving phase in comparison to simulation-based
generated scenarios. We assume that even in a minia-
ture setup, e.g., the manipulation of light, contrast,
partially hidden signs will be much easier than in sim-
ulations. Furtheron, we will consider if the setup
allows for an automatic optimization of driving be-
haviour under aggrevated circumstances such as take-
over or driving curves in different weather conditions.
6 CONCLUSIONS
There is indication that the use of miniature model
vehicles is a helpful testing means for ML-based au-
tonomous driving solutions – in addition to real-world
tests and simulations. Using miniature model vehi-
cles on a 1:87 scale has some specific advantages over
other common scales, either directly (using off-the-
shelf components) or indirectly (by the need to opti-
mize methods thoroughly to fit to the demanding con-
straints).
First steps were taken to set up a fleet of minia-
ture vehicles that could serve as testing platform for
– specifically ML-based – methods to facilitate au-
tonomous driving. Further implementation and tests
will be carried out to evaluate if miniature autonomy
can be realized and where it is applicable.
REFERENCES
Braunschweig, T. (2019). https://wiki.ifr.ing.tu-
bs.de/carolocup/.
Coulter, R. C. (1992). Implementation of the Pure Pur-
suit Tracking Algorithm. Robotics Institute, Carnegie
Mellon University.
Fuhrmann, J. (2018). Implementierung einer Tensor Pro-
cessing Unit mit dem Fokus auf Embedded Systems
und das Internet of Things. Bachelor Thesis.
Gebhardt, V., Rieger, G. M., Mottok, J., and Gießelbach, C.
(2013). Funktionale Sicherheit nach ISO 26262 - ein
Praxisleitfaden zur Umsetzung. dpunkt.verlag.
Jouppi, N. P., Young, C., Patil, N., Patterson, D., Agrawal,
G., Bajwa, R., Bates, S., Bhatia, S., Boden, N.,
Borchers, A., Boyle, R., Cantin, P., Chao, C., Clark,
C., Coriell, J., Daley, M., Dau, M., Dean, J., Gelb,
B., Ghaemmaghami, T. V., Gottipati, R., Gulland, W.,
Hagmann, R., Ho, C. R., Hogberg, D., Hu, J., Hundt,
R., Hurt, D., Ibarz, J., Jaffey, A., Jaworski, A., Ka-
plan, A., Khaitan, H., Killebrew, D., Koch, A., Ku-
mar, N., Lacy, S., Laudon, J., Law, J., Le, D., Leary,
C., Liu, Z., Lucke, K., Lundin, A., MacKean, G.,
Maggiore, A., Mahony, M., Miller, K., Nagarajan, R.,
Narayanaswami, R., Ni, R., Nix, K., Norrie, T., Omer-
nick, M., Penukonda, N., Phelps, A., Ross, J., Ross,
M., Salek, A., Samadiani, E., Severn, C., Sizikov, G.,
Snelham, M., Souter, J., Steinberg, D., Swing, A.,
Tan, M., Thorson, G., Tian, B., Toma, H., Tuttle, E.,
Vasudevan, V., Walter, R., Wang, W., Wilcox, E., and
Yoon, D. H. (2017). In-datacenter performance anal-
ysis of a tensor processing unit. In 2017 ACM/IEEE
44th Annual International Symposium on Computer
Architecture (ISCA), pages 1–12.
Koopman, P. (2018). Practical experience report: Automo-
tive safety practices vs. accepted principles. In Gal-
lina, B., Skavhaug, A., and Bitsch, F., editors, Com-
puter Safety, Reliability, and Security, pages 3–11,
Cham. Springer International Publishing.
Miniature Autonomy as One Important Testing Means in the Development of Machine Learning Methods for Autonomous Driving: How
ML-based Autonomous Driving could be Realized on a 1:87 Scale
487

LeCun, Y., Bottou, L., Bengio, Y., Haffner, P., et al.
(1998). Gradient-based Learning Applied to Doc-
ument Recognition. Proceedings of the IEEE,
86(11):2278–2324.
Lecun, Y., Cortes, C., and Burges, C. J. C. THE
MNIST DATA-BASE of handwritten digits. website,
http://yann.lecun.com/exdb/mnist/.
Nikolov, I. (2009). Verfahren zur Fahrbahnverfolgung
eines autonomen Fahrzeugs mittels Pure Pursuit und
Follow-the-carrot. Bachelor Thesis.
Rierson, L. (2013). Developing Safety-critical Software - A
Practical Guide for Aviation Software and DO-178C
Compliance. CRC Press.
Schenck, W., Horst, M., Tiedemann, T., Gaulik, S., and
M
¨
oller, R. (2017). Comparing parallel hardware ar-
chitectures for visually guided robot navigation. Con-
currency and Computation: Practice and Experience,
29(4):e3833. e3833 cpe.3833.
Tedaldi, D., Pretto, A., and Menegatti, E. (2014). A Ro-
bust and Easy to Implement Method for IMU Cali-
bration without External Equipments. In 2014 IEEE
International Conference on Robotics and Automation
(ICRA), pages 3042–3049.
Tiedemann, T. (2019). Part of the Miniatur
Wunderland Hamburg. figshare. doi:
https://doi.org/10.6084/m9.figshare.8231198.
Wunderland, M. (2019). Miniatur wunderland. (website),
https://www.miniatur-wunderland.com.
Zug, S., Steup, C., Scholle, J., Berger, C., Landsiedel,
O., Schuldt, F., Rieken, J., Matthaei, R., and Form,
T. (2014). Technical Evaluation of the Carolo-Cup
2014 - A Competition for Self-Driving Miniature
Cars. In 2014 IEEE International Symposium on
Robotic and Sensors Environments (ROSE) Proceed-
ings, pages 100–105.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
488
