
A Supervised Autonomous Approach for Robot Intervention with
Children with Autism Spectrum Disorder
Vinícius Silva
1a
, Sandra Queirós
1
, Filomena Soares
1b
, João Sena Esteves
1c
and Demétrio Matos
2d
1
Center Algoritmi, University of Minho, Campus de Azurém, Guimarães, Portugal
2
ID+ – IPCA-ESD, Campus do IPCA, Barcelos, Portugal
Keywords: Playware, Human Robot Interaction, Autism Spectrum Disorders.
Abstract: Technological solutions such as social robots and Objects based on Playware Technology (OPT) have been
used in context of intervention with children with Autism Spectrum Disorder (ASD). Very often in these
systems, the social robot is being fully controlled using the Wizard of Woz (WoZ) method. Although reliable,
this method increases the cognitive workload on the human operator. They have to pay attention to the child
and ensure that the robot is responding correctly to the child’s actions. In order to mitigate this, recently,
researchers have been proposing the introduction of some autonomy in these systems. Following this trend,
the present work targets a supervised behavioural system architecture using a novel hybrid approach with a
humanoid robot and OPT to allow the detection of the child behaviour and consequently adapt the robot to
the child’s action, enabling a more natural interaction. The system was designed for emotion recognition
activities with children with ASD. Additionally, this paper provides an overview of the experimental design
where the interventions will be carried out in school environments in a triadic setup (child-robot-
researcher/therapist).
1 INTRODUCTION
Autism Spectrum Disorder (ASD) is a developmental
disability defined by the diagnostic criteria that
include deficits in social communication and social
interaction, and the presence of restricted, repetitive
patterns of behaviour, interests, or activities that can
persist throughout life (Association 2013; Mazzei et
al. 2012). Although, nowadays the diagnosis can be
done correctly around the 36 months old, the
intervention is still a relatively unexplored field. Due
to the diversity and specificities of symptoms,
professionals have found some difficulties in
developing effective interventions.
Some interventions performed in the last years use
robots, mechanical components, and computers.
Studies conducted with recourse to these materials
show that children with ASD have a great affinity
with them (Tapus et al. 2012; Dautenhahn & Werry
a
https://orcid.org/0000-0003-0082-343X.
b
https://orcid.org/0000-0002-4438-6713
c
https://orcid.org/0000-0002-3492-1786
d
https://orcid.org/0000-0003-4417-6115
2004). It has been demonstrated that subjects
diagnosed with ASD show improvements in social
behaviours such as imitation, eye gaze, and motor
ability while interacting with robots. Based on this
previous works, it is possible to conclude that robots
are very promising in intervention/therapies. Most of
these works have been exploring the interaction
between children and the robots, focusing on tasks
such as imitation and collaborative interaction
(Dautenhahn et al. 2006; Wainer et al. 2010).
Although the results have been interesting, some of
the studies in the literature use non-humanoid robots
or systems with no (or at least low) adaptation to the
activity. In this sense, most of the interactions with
robots are often rigid, ambiguous, and confusing.
Additionally, the interaction is triadic (child-
therapist-robot) where the therapist/experimenter
interacts together with the children. Thus, it is
important to introduce some adaptation to these
Silva, V., Queirós, S., Soares, F., Esteves, J. and Matos, D.
A Supervised Autonomous Approach for Robot Intervention with Children with Autism Spectrum Disorder.
DOI: 10.5220/0007958004970503
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 497-503
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
497

platforms in order to enrich the interaction with the
user and lighten up the cognitive burden on the human
operator. Additionally, to the use of robots,
researchers have been using objects with playware
technology (OPT). These devices are tangible
interfaces developed for children’s play and playful
experiences for the user (Lund et al. 2005). In general,
the use of these technologies have been very useful in
intervention with these children (Dautenhahn &
Billard 2002). However, in general, they do not adapt
to children behaviour. Others tries to introduce some
adaptation by using wearable devices which can be
invasive. Furthermore, none explores the use of an
adaptative hybrid approach, using a social robot and
an OPT, to interact with children with ASD.
Following this idea, the present work proposes a
supervised behavioural system architecture using a
hybrid approach to allow the detection of the child
behaviour and consequently adapt the robot to the
child’s action, enabling a more natural interaction.
The goal of this approach is to introduce some level
of automation in a supervised manner. Additionally,
the present work consists in the development of an
OPT to be used as an add-on to the human-robot
interaction with children with ASD in emotion
recognition activities.
The present paper is organized as follow: section
2 presents the related work; section 3 shows the
proposed approach; the experimental design is
described in section 4; the final remarks and future
work are addressed in section 5.
2 RELATED WORK
Nowadays, distinct technological strategies have
been used in the intervention process with children
with ASD, mainly through the use of Objects based
on Playware Technology (OPT) and social robots
(Lund 2009; Pennisi et al. 2016). Different social
robots have already been used successfully in robot
assisted therapy (Pennisi et al. 2016), helping children
to develop their skills. Many of these systems helps
to deliver a standard and effective treatment to
children with ASD by using the Wizard of Oz (WoZ)
method, where the therapist or researcher fully
controls the robot. Despite of being a successful
method (Huijnen et al. 2016), it requires an additional
operator other than the therapist that is engaging with
the child in the triadic setup. However, some
configurations (Costa et al. 2015; Costa et al. 2019),
uses a keypad where the researcher/therapist controls
the interaction. Although it does not need an
additional operator, this approach imposes a cognitive
load on the researcher/therapist during the
intervention. Additionally, systems that employ the
WoZ method usually do not record the child’s
behaviour (body posture, facial expressions, eye gaze,
among others) which might not be suitable to use in
live Human Robot Interaction (HRI) scenarios
(Zaraki et al. 2018). Therefore, it is paramount to
introduce some degree of autonomy, enabling the
robot to perform some autonomous behaviours whilst
keeping track of the interaction data.
Following this trend, there has been a concerning
in developing more adaptive approaches to interact
with children with ASD.
Some of the works in the literature (Mazzei et al.
2011; Bekele et al. 2014; Bekele et al. 2013), use a
combination of hardware, wearable devices and
software algorithms to measure the affective states
(e.g. eye gaze attention, facial expressions, vital
signs, skin temperature, and skin conductance
signals) of the child in order to adapt the robot
behaviour. Bekele et al. (Bekele et al. 2013; Bekele et
al. 2014) developed and later evaluated a humanoid
robotic system capable of intelligently managing joint
attention prompts and adaptively respond based on
measurements of gaze and attention. They concluded
that the children with ASD directed their gaze
towards to the robot when prompted with a question
by the robot. Furthermore, the authors suggested that
robotic systems endowed with enhancements for
successfully captivating the child attention might be
capable to meaningfully enhance skills related to
coordinated attention. However, the completion rate
of the activity was 60% for the ASD group, mainly
due to the fact of the willingness of these participants
to wear the LED cap even for a brief interval of time
(i.e. less than 15 min). This wearable device was a
crucial part of the system since it allowed to track the
children gaze during the activity. Thus, there is a need
for the development of non-invasive systems and the
use of such technologies with children with ASD with
common sensory sensitivities (Rogers & Ozonoff
2005).
In order to overcome the use of wearable devices,
other projects (Esteban et al. 2017; Koutras et al.
2018) use an array of cameras and depth sensors that
allows the robot to perform tasks autonomously.
These sensory devices are usually precisely fixed,
having into account the background and the lighting
conditions, in a static structure around a table where
the robot is placed, being limited to a controlled
environment. Although this approach minimizes the
noise in the robot perception system, laboratorial
settings are usually not suitable for children with
ASD, since it can be stressful, taking a considerable
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
498

time for them to adapt to a new environment.
Therefore, a recent approach (Zaraki et al. 2018)
proposes the use social robots and how to introduce
some autonomy in non-clinical environments. The
authors use the Kaspar robot with a robotic system
called Sense-Think-Act that allows the robot to
operate with some autonomy (under human
supervision) with children in the real-world school
settings. The system was successful in providing the
robot with appropriate control signals to operate in a
semi-autonomous manner. They further concluded
that the architecture appears to have promising
potential.
Similar to the use of social robots, researchers
have been using OPT to interact with children with
ASD. The term “playware” is suggested as a
combination of intelligent hardware and software that
aims at producing play and playful experiences
among users (Lund et al. 2005). This technology
emphasizes the role of interplay between morphology
and control using processing, input, and output. These
objects can take up different embodiments such as
modular buttons, coloured puzzle tiles (Lund 2009),
Lego-like building blocks (Barajas et al. 2017),
among others. Although there is some works
concerning the use of OPT with children, only a few
research projects have been exploring the use of this
technology as an intervention tool with children with
ASD. (Lund 2009), used the developed tiles in a game
with ASD participants which consisted in mixing the
tiles in order to produce new colours. They observed
that OPT can be playful tools for cognitive challenged
children. Since the use of these objects as well as the
use of social robots with children with ASD have
presented positive outcomes, the authors proposed
and evaluated in (Silva et al. 2018) the use of a hybrid
approach (a social robot and an OPT) in an
intervention process with children with ASD. The
preliminary results demonstrated the positive
outcomes that this child-OPT-robot interaction may
produce.
3 PROPOSED APPROACH
In order to conduct an effective child-robot
interaction in a supervised manner it is important for
the system to be able to infer the participants
psychological disposition in that way adapting the
intervention process. Therefore, it is paramount to
have a framework able to extract different sensory
data. Taking this into account the following section
shows the proposed framework.
3.1 Framework
The proposed system, depicted in Figure 1, is
composed of a humanoid robot capable of displaying
facial expressions, a computer, two OPT devices, an
RGB camera, and a 3D sensor.
Figure 1: The proposed system. Starting from the left
bottom: PlayBrick, PlayCube, Intel RealSense D435, HP
RGB camera, computer, and the humanoid robot ZECA.
The Zeno R50 RoboKind humanoid child-like
robot ZECA (a Portuguese name that stands for Zeno
Engaging Children with Autism) is a robotic platform
that has 34 degrees of freedom: 4 are located in each
arm, 6 in each leg, 11 in the head, and 1 in the waist.
The robot is capable of expressing facial cues thanks
to the servo motors mounted on its face and a special
material, Frubber, which looks and feels like human
skin, being a major feature that distinguishes Zeno
R50 from other robots.
Concerning the OPT, two devices were
developed: the PlayCube and PlayBrick. The
PlayCube (Silva et al. 2019) (7cm×7cm×7cm), has an
OLED RGB display with a touch sensitive surface,
Inertial Measurement Unit (IMU), a small
development board (ESP32) that already has built-in
Bluetooth and Wi-Fi communication, an RGB LED
ring, a Linear Resonant Actuator (LRA), and a Li-Po
battery. Interacting with the PlayCube just means,
touching the physical object and manipulating it via
natural gestures (e.g. rotation, shake, tilt, among
others). The PlayBrick (20cm×11cm×3cm) shares the
same internal components as the PlayCube but
instead of the small 1.5-inch display that is on the
cube, the brick has a 5.0-inch touch resistive display
which allows to display more information.
Feedback is a key feature in guiding the children
through the play activity, especially children with
A Supervised Autonomous Approach for Robot Intervention with Children with Autism Spectrum Disorder
499
ASD. Therefore, both OPT devices have visual and
touch feedback, through the use of RGB LEDs and
LRA motors. In both devices, the type of feedback is
configurable.
Regarding the capture of sensing information, it
was used two different sensors, an RGB camera and
an Intel RealSense. The camera used is a full high
definition RGB HP camera. This camera is used with
the OpenFace library (Baltrusaitis et al. 2016) to track
the user facial action units and head motion data in
order to infer possible distraction patterns.
The Intel Realsense 3D sensor, 90mm x 25 mm x
25mm, (Intel 2019) is a USB-powered device that
contains a conventional RGB full HD camera, an
infrared laser projector, and a pair of depth cameras.
The present work uses the Intel RealSense model
D435 along with the Intel RealSense SDK and
Nuitrack (Nuitrack 2019) SDK to track the user
joints. This sensor was manly chosen due to its
smaller size which allows the final framework to be
portable. It will be placed on the robot chest.
3.2 The Behavioural Control
Architecture
The software architecture includes three main
subsystems where two are interconnected via a
TCP/IP network and Bluetooth, Figure 2.
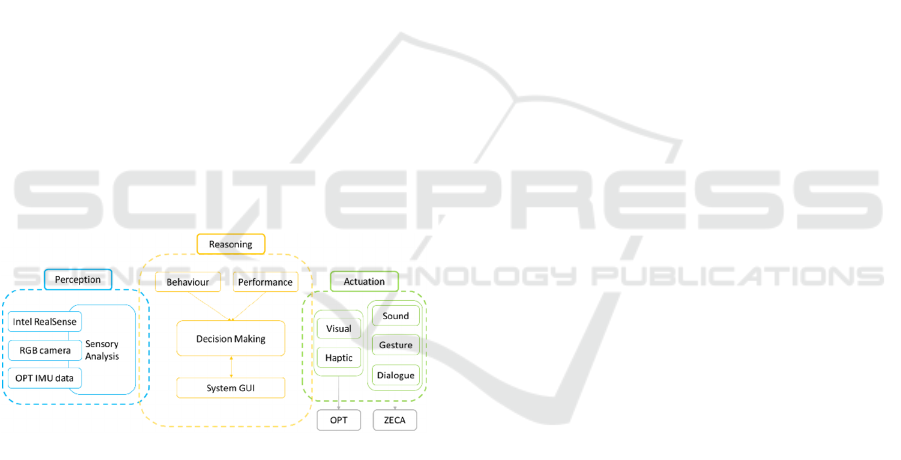
Figure 2: The behavioural architecture is composed of three
main layers – the Perception (blue), Reasoning (yellow),
and Actuation (green) layers.
The perception layer is responsible for sensing
and processing of the data received from the sensors.
Since the activities target the recognition of emotions,
it is necessary to extract and analyse features that are
required by these game scenarios such as: gaze, the
frequency and duration of possible movements done
by the participant, emotional cues, object tracking,
and stereotypical behaviours (such as hands and head
shaking).
Regarding the gaze estimation and emotional
cues, it is used the open source OpenFace library with
the RGB camera. It detects the user face and outputs
the facial landmarks, the head pose and eye gaze data,
and facial action units. For detecting the child facial
expressions, it was trained a Support Vector Machine
with a Radial Basis function (RBF) kernel model.
This model (adapted from previous work of the
research group, Silva et al. 2016) can detect the six
basic emotions plus neutral, achieving an accuracy of
89%.
Concerning the automatic recognition of User´s
movements, it is used the Intel RealSense with the
Nuitrack Software Development Kit (SDK). A 3D
sensor is used because of the depth information that
is acquired, providing another dimensional
information being less sensitive to illumination and
subject texture (Esteban et al. 2017). The Nuitrack
SDK is able to simultaneously detect up to six people
and the 3D positions of 19 joints. The position
coordinates are normalized so that the motion is
invariant to the initial body orientation and size.
Using this information, the User´s moving trend will
be computed and a supervised classifier will be
trained using a dataset that contains 600 minutes of
child-robot interaction (Costa et al. 2019).
Additionally, it is also possible to extract the User´s
proximity to the robot.
In order to track the OPT, a Histogram-of-
Oriented-Gradient (HOG) based object detector was
trained. Additionally, the Dlib correlation tracker
(King 2009) is also used, allowing the detection and
tracking of the OPT in real-time during an
intervention session. This approach is described in
detail in (Silva et al. 2019).
Additionally, the OPT IMU data is used to detect
if the child is interacting with the system.
Furthermore, the IMU information can be used to
detect some stereotypical behaviours (such as hand
shaking) contributing to the human action
recognition.
The reasoning layer is influenced by the child
behaviour and performance. Using the information
acquired and computed by the perception layer, the
system will decide the interaction flow of the
intervention. The decided action is displayed on the
Graphical User Interface (GUI), Figure 3. The
interaction flow will be designed using a sate machine
approach. A state machine is a simple model to track
the events triggered by external inputs. This is done
by assigning intermediate states to decide what
happens when a specific input comes, and which
event is triggered. The output of this layer will
influence the dynamics of the next layer, the Action
layer. Therefore, the behaviour displayed by the robot
will be influenced by the interaction flow of the
session.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
500
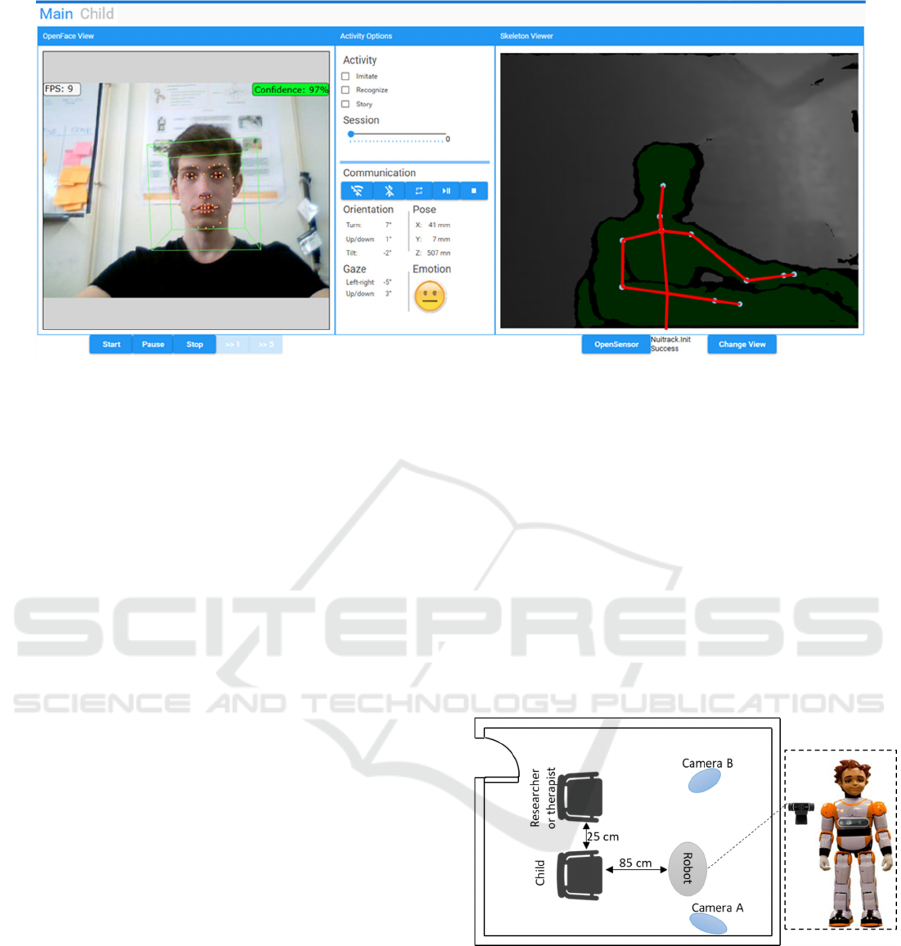
Figure 3: The graphical user interface. The user can easily control the overall system and receive feedback from each
subsystem. It is possible to see the participant’s facial data (such as gaze, head orientation, facial expression) as well as the
skeleton data.
Additionally, the feedback given by the OPT
(visual and haptic) will also be dependent of the
output of the previous layer.
Since it is a supervised architecture, at any time,
the researcher/therapist can pause/resume and
start/stop the activity on the GUI.
The GUI will prompt the detected behaviours and
recommend possible actions that will be carried out
automatically, unless the researcher/therapist
intervenes. It is possible to record the session data
such as child performance, head orientation, facial
cues, IMU data from the OPTs, and skeleton (joints)
data. Through the GUI it is established the TCP/IP
connection with the robot (ZECA) and the Bluetooth
connection with the OPTs (PlayCube or PlayBrick).
Additionally, with the GUI it is possible to visualize
the children data (e.g. the child performance in all
sessions). Furthermore, if desired the
researcher/therapist can extend the session time. The
progress of the session will be also displayed in the
GUI.
4 EXPERIMENTAL DESIGN
In order to evaluate the proposed framework, a study
will be conducted in child-friendly environments
(such as schools) where the experiments will be
performed individually in a triadic setup, i.e., child-
robot- researcher/therapist.
The experimental set-up, Figure 4, consists in the
child seating in front of the robot, on the child’s line
of sight, at approximately 85 cm. Behind the robot,
two cameras to video record the sessions are
positioned. Camera A records only the child and
camera B records the overall session. Next to the
child is the researcher/therapist responsible for
maintaining him/her attention to the task. The
PlayBrick or PlayCube is on the hands of the child
since the beginning of the session. Since the tests will
be conducted in a known, comfortable environment
for the child, it is also an unconstrained setting,
therefore this layout is proposed in order to provide a
basis of comparison between the participants along
the sessions.
Figure 4: The proposed experimental design with a triadic
configuration, where the child is approximately 25cm from
therapist and 85cm from the robot.
The experimental configuration includes eight
individual sessions in the children´ school: Pre-test,
six Practice sessions, and Post-test. The Pre-Test is to
measure children’ skills; the Practice phase is to
implement the activities; and the Post-Test is to
evaluate if the competence was acquired. The Pre and
Post tests are performed without the proposed system.
The first time the activity is performed, the researcher
explains the objective of the session and how the
A Supervised Autonomous Approach for Robot Intervention with Children with Autism Spectrum Disorder
501

system works. The sessions approximately last 10
minutes, except the first that can last 15 minutes due
to its training period. The researcher/therapist can
extend the default time of the session if needed.
However, the session can be interrupted if the child
demonstrates irritability, fussiness or lack of interest
on the session. The sessions are video recorded for
further analysis, using cameras A and B (Figure 4).
The activities played are focused on emotion
recognition. Therefore, two game scenarios aiming
on improving the children emotion recognition skills
were developed: Recognize and Storytelling
activities. In the Recognize game scenario, ZECA
randomly performs a facial expression and its
associated gestures, representing one of the five basic
emotions (happiness, sadness, anger, surprise, and
fear). The child has to choose the correct facial
expression matching the emotion. Concerning the
Storytelling activity, ZECA randomly tells one of the
fifteen available stories that are associated with an
emotion and the child has to choose the correct facial
expression matching the emotion. In parallel, as a
visual cue, an image is shown representing the social
context of the story. The goal of this game scenario is
to evaluate the affective state of a character at the end
of a story. In order to select the answer, in both
activities, the children have to manipulate the cube or
brick by tilting it back or forward in order to scroll
through the facial expressions displayed by the OPTs.
When the child selects an answer, ZECA verifies if
the answer is correct and prompts a reinforcement.
Simultaneously, the OPTs provide visual and/or
haptic feedback accordingly to the child’s answer.
The participants are children with ASD aged
between 6 and 10 years old with no comorbidities
associated. Since the work involves typically
developing children and children with ASD, the
following ethical concerns were met: the research
work was approved by the ethical committee of the
university, collaboration protocols were firmed
between the university and the schools, and informed
consents were signed by the parents/tutors of the
children that will participate in the studies.
5 FINAL REMARKS AND
FUTURE WORK
The present paper concerns the development of a
supervised autonomous system to promote social
interactions with children with ASD. These
individuals are described as having impairments in
social interactions and communications, usually
accompanied by restricted interests and repetitive
behaviour. Technological devices (such as social
robots and OPT) are increasingly being used in
intervention processes with children with ASD.
However, in general, they do not adapt to children
behaviour. Others try to introduce some adaptation by
using wearable devices which can be invasive.
Furthermore, none explores the use of an adaptive
hybrid approach, using a social robot and an OPT, to
interact with children with ASD.
Therefore, the present work proposes a supervised
behavioural system architecture using a hybrid
approach to allow the detection of the child behaviour
and consequently adapt the robot to the child’s action,
enabling a more natural interaction. A full
autonomous system is not desired due to ethical
concerns (Esteban et al. 2017).
The supervised behavioural framework has three
main layers – Perception, Reasoning, and Actuation.
The perception layer is responsible for sensing and
analysis of the data received from the sensors. The
interaction flow is defined in the reasoning layer.
Finally, the robot will display the different behaviours
and the OPT will give different feedbacks
accordingly to the output of the Reasoning layer.
Since it is a supervised approach, the system GUI will
prompt the detected behaviours and depending on the
interaction state, it will recommend possible actions
that will be carried out automatically, unless the
researcher/therapist intervenes.
Future work includes a continuous improve of the
framework and testing the proposed system in school
environment in a triadic setup (child-robot-
researcher/therapist), following the proposed
experimental design, with the goal to evaluate how
this hybrid adaptive concept (OPT and social robot)
can be used as a valuable tool to promote emotion
skills in children with ASD.
The system’s level of autonomy should also be
increased by adding interactive machine learning,
enabling it to learn on the fly.
ACKNOWLEDGEMENTS
The authors thank to COMPETE: POCI-01-0145-
FEDER-007043 and FCT – Fundação para a Ciência
e Tecnologia within the Project Scope:
UID/CEC/00319/2019. Vinicius Silva also thanks
FCT for the PhD scholarship SFRH/BD/
SFRH/BD/133314/2017.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
502

REFERENCES
Association, A. P., 2013. DSM 5, Available at:
http://ajp.psychiatryonline.org/article.aspx?articleID=1
58714%5Cnhttp://scholar.google.com/scholar?hl=en&
btnG=Search&q=intitle:DSM-5#0.
Baltrusaitis, T., Robinson, P. & Morency, L. P., 2016.
OpenFace: An open source facial behavior analysis
toolkit. In 2016 IEEE Winter Conference on
Applications of Computer Vision, WACV 2016.
Barajas, A. O., Osman, H. Al & Shirmohammadi, S., 2017.
A Serious Game for Children with Autism Spectrum
Disorder as a Tool for Play Therapy.
Bekele, E. et al., 2014. Pilot clinical application of an
adaptive robotic system for young children with autism.
Autism : the international journal of research and
practice, 18(5), pp.598–608. Available at:
http://www.pubmedcentral.nih.gov/articlerender.fcgi?a
rtid=3980197&tool=pmcentrez&rendertype=abstract.
Bekele, E. T. et al., 2013. A step towards developing
adaptive robot-mediated intervention architecture
(ARIA) for children with autism. IEEE Transactions on
Neural Systems and Rehabilitation Engineering, 21(2),
pp.289–299.
Costa, S. et al., 2019. Social-Emotional Development in
High Functioning Children with Autism Spectrum
Disorders using a Humanoid Robot. Interaction
Studies, accepted for publication.
Costa, S. et al., 2015. Using a Humanoid Robot to Elicit
Body Awareness and Appropriate Physical Interaction
in Children with Autism. International Journal of
Social Robotics, 7(2), pp.265–278.
Dautenhahn, K. et al., 2006. How May I Serve You? A
Robot Companion Approaching a Seated Person in a
Helping Context. Human-Robot Interaction.
Dautenhahn, K. & Billard, A., 2002. Games children with
autism can play with Robota, a humanoid robotic doll.
Universal access and assistive technology, pp.179–190.
Available at: http://citeseerx.ist.psu.edu/viewdoc/
download?doi=10.1.1.66.7741&rep=rep1&t
ype=pdf.
Dautenhahn, K. & Werry, I., 2004. Towards interactive
robots in autism therapy: Background, motivation and
challenges. Pragmatics & Cognition, 12(1), pp.1–35.
Available at: http://www.jbe-platform.com/content/
journals/10.1075/pc.12.1.03dau.
Esteban, P. G. et al., 2017. How to build a supervised
autonomous system for robot-enhanced therapy for
children with autism spectrum disorder. Paladyn, 8(1),
pp.18–38.
Huijnen, C. A. G. J. et al., 2016. Mapping Robots to
Therapy and Educational Objectives for Children with
Autism Spectrum Disorder. Journal of Autism and
Developmental Disorders.
Intel, 2019. Intel® RealSenseTM Technology. Available
at: https://www.intel.com/content/www/us/en/archite
cture-and-technology/realsense-overview.html
[Accessed April 8, 2019].
King, D. E., 2009. Dlib-ml: A Machine Learning Toolkit.
Journal of Machine Learning Research.
Koutras, P. et al., 2018. Multi3: Multi-Sensory Perception
System for Multi-Modal Child Interaction with
Multiple Robots.
Lund, H.H., 2009. Modular playware as a playful diagnosis
tool for autistic children. 2009 IEEE International
Conference on Rehabilitation Robotics, ICORR 2009,
pp.899–904.
Lund, H.H., Klitbo, T. & Jessen, C., 2005. Playware
technology for physically activating play. Artificial Life
and Robotics, 9(4), pp.165–174.
Mazzei, D. et al., 2011. Development and evaluation of a
social robot platform for therapy in autism. Engineering
in Medicine, Proceedings of the Annual International
Conference of the IEEE, 2011, pp.4515–8.
Mazzei, D. et al., 2012. Robotic social therapy on children
with autism: Preliminary evaluation through multi-
parametric analysis. In Proceedings - 2012 ASE/IEEE
International Conference on Privacy, Security, Risk
and Trust and 2012 ASE/IEEE International
Conference on Social Computing, SocialCom/PASSAT
2012.
Nuitrack, 2019. Nuitrack Full Body Skeletal Tracking
Software - Kinect replacement for Android, Windows,
Linux, iOS, Intel RealSense, Orbbec. Available at:
https://nuitrack.com/ [Accessed April 8, 2019].
Pennisi, P. et al., 2016. Autism and social robotics: A
systematic review. Autism Research, 9(2), pp.165–183.
Rogers, S.J. & Ozonoff, S., 2005. Annotation: What do we
know about sensory dysfunction in autism? A critical
review of the empirical evidence. Journal of Child
Psychology and Psychiatry, 46(12), pp.1255–1268.
Available at: http://doi.wiley.com/10.1111/j.1469-
7610.2005.01431.x [Accessed March 31, 2019].
Silva, V. et al., 2018. Building a hybrid approach for a game
scenario using a tangible interface in human robot
interaction. In Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics).
Silva, V. et al., 2019. PlayCube: Designing a Tangible
Playware Module for Human-Robot Interaction. In
Advances in Intelligent Systems and Computing.
Silva, V. et al., 2016. Real-time Emotions Recognition
System. In 8th International Congress on Ultra Modern
Telecommunications and Control Systems and
Workshops (ICUMT). Lisboa, pp. 201–206.
Tapus, A. et al., 2012. Children with autism social
engagement in interaction with Nao, an imitative robot.
Interaction Studies.
Wainer, J. et al., 2010. Collaborating with Kaspar: Using an
autonomous humanoid robot to foster cooperative
dyadic play among children with autism. In 2010 10th
IEEE-RAS International Conference on Humanoid
Robots, Humanoids 2010.
Zaraki, A. et al., 2018. Development of a Semi-
Autonomous Robotic System to Assist Children with
Autism in Developing Visual Perspective Taking
Skills. In RO-MAN 2018 - 27th IEEE International
Symposium on Robot and Human Interactive
Communication. pp. 969–976.
A Supervised Autonomous Approach for Robot Intervention with Children with Autism Spectrum Disorder
503
