
A New Trust Architecture for Smart Vehicular Systems
Emna Jaidane
1
, Mohamed Hamdi
2
, Taoufik Aguili
1
and Tai Hoon Kim
3
1
Communication Systems Laboratory, National Engineering School of Tunis, Tunis El Manar University, Tunis, Tunisia
2
El Ghazala Innovation Park, Tunis, Tunisia
3
University of Tasmania, Australia
Keywords:
Optical Flow, Timestamp, Blackbox, Authentic Traces.
Abstract:
Modern vehicles are often equipped with event recording capabilities through blackbox systems. These allow
the collection of different types of traces that can be used for multiple applications including self driving,
post-accident processing and drive monitoring. In this paper, we develop a new trust architecture to enrich
the existing blackbox models by adding timestamped optical flows. Our approach provides a tool to collect
authentic traces regarding the mobile objects that interfere with the environment of the car, which is comple-
mentary to the events considered by the systems available in the litterature.
1 INTRODUCTION
An intelligent vehicle is a vehicle enhanced with per-
ception, reasoning, and actuating devices that enable
monitoring and automation of driving tasks. The
motivation of building intelligent vehicles is mak-
ing driving experience safer, more economic and effi-
cient. Intelligent vehicles are equipped with sensors,
radars, lasers and Global Positioning System (GPS)
that allow to the vehicle road scene understanding.
Smart vehicles assist the driver in driving monitor-
ing by doing actions like safe lane following, obstacle
avoidance, overtaking control and avoiding dangerous
situations. There are many other functionnalities im-
plemented in smart vehicles rendering them fully au-
tomated vehicles that use detailed maps to safely drive
and navigate itself with no human interaction, the ve-
hicle can not only drive itself but it can be parked on
its own. Smart vehicles are also equipped with au-
tomatic traffic accident detection systems that detect
accident and in some cases send notifications to con-
cerned authorities (Broggi et al., 2008).
To realize the above describted functions, different
types of traces are collected by vehicle’s sensors from
the surrounding environment. Collected data must be
authentic to permit to the vehicle taking the correct
decision. This paper addresses the security of col-
lected traces during driving. We focus on information
related to moving objects detection. Moving objects
can influence the driving behaviour either through dis-
traction or by causing a danger that may require an
active response. Mobile objects are detected by cam-
eras installed on board vehicles. Depending on the
movement of the camera relative to the objects, three
cases can be distinguished:
• Static camera and moving objects: In this case,
images have a fixed background, which can help
in moving objects detection.
• Moving camera and static objects: reference
points for movement can be chosen since objects
are known as static.
• Moving camera and moving objects: This is the
case discussed in our paper, their is no static back-
ground or objects that can be taken as references.
The camera is installed on board a vehicle and has
the same view as the driver. The maximum value
of vehicle’s velocity is equal to 90 km/h.
Information about objects motion can be known by
optical flow calculation (Agarwal et al., 2016). Opti-
cal flow is calculated from the recorded scene to have
an estimate of the apparent motion. The optical flow
describes the direction and time rate of pixels in a time
slot of two consequent images. A two dimensional ve-
locity vector, carrying on the direction and the veloc-
ity of motion is assigned to each pixel of the picture.
Optical flow values are saved in the vehicle blackbox.
The objective of optical flow calculation is having a
feedback of events that happen during driving expe-
rience because these events can be used as authentic
traces for self driving, post-accident processing and
drive monitoring applications.
Jaidane, E., Hamdi, M., Aguili, T. and Kim, T.
A New Trust Architecture for Smart Vehicular Systems.
DOI: 10.5220/0007959103810386
In Proceedings of the 16th International Joint Conference on e-Business and Telecommunications (ICETE 2019), pages 381-386
ISBN: 978-989-758-378-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
381

To be used as an authentic trace, optical flow values
must be protected against modification since their cre-
ation and must be verified with time values to have a
trace when events have occured. To do this, we pro-
pose to timestamp optical flow matrix saved in the
blackbox.
This paper is organized as follow: In section 2, we
present a litterature review of mobile objects detec-
tion techniques. In section 3, we present optical flow
basics and timestamping in vehicular networks. In
section 4, we expose our approach for optical flow
timestamping, we illustrate our proposal with a prac-
tical use case in section 5 and we conclude our paper
in section 6.
2 LITERATURE REVIEW
There are three methods for mobile objects tracking
which are frame difference, background subtraction
and optical flow. Frame difference method is based
on the difference between pixels to find the moving
object. There is a frame which is taken as a refer-
ence. The difference between the reference frame and
the current frame is calculated. The moving object is
detected from the found difference. In (Singla, 2014),
the video is captured by a static camera, the difference
between the two consecutive frames is calculated, and
then it is transformed to Gray image and filtered us-
ing Gauss low pass filter and binarized at the end. Ex-
perimental results show motion in the binary image
found by calculating the difference between the two
frames. In (Joshi, 2014), an algorithm is developed
to calculate the speed of moving vehicles and detect
those which violate the speed limits. Video is cap-
tured by a static camera, tracking of the moving object
and calculation of the velocity of the object is done
using segmentation in a first step, which separates re-
gions of the image. Segmentation is done using frame
difference algorithm.
The inconvenient of the temporal differencing method
is that it cannot detect slow changes, for this reason,
background subtraction method is used. This method
is based on extracting background which is the region
of the image without motion. The absolute differ-
ence between the background model and each instan-
taneous frame is used to detect the moving object.
(N.Arun Prasath, 2015) uses the background subtrac-
tion as a first step to estimate vehicle speed. After
conversion of the video into frames, the background
is extracted to detect moving vehicles. After that, fea-
ture extraction and vehicle tracking are done to de-
termine the speed. An algorithm that detects moving
objects in high secured environments is proposed in
(Singh et al., 2014). Detection is done online and of-
fline. In Offline detection, the video is divided into
frames. Moving object is detected by separating the
foreground from a static background. When the mov-
ing object is known, it is marked by a rectangular box.
When the object moves, the alarm is activated. The
position of the centroid of the object is calculated, and
the distance and the velocity of the object are deter-
mined. A system for monitoring traffic rules violation
is presented in (Gupta, 2015) to monitor the velocity
limits violation and detect the registered license plate
number. To monitor velocity limits violation, veloc-
ity is calculated. The first step of velocity calcula-
tion is vehicle tracking which is done by background
subtraction. Each frame is subtracted from the back-
ground model. The blobs that are found as result of
subtraction correspond to moving objects.
Background subtraction is a widely used approach for
detecting moving objects from static cameras.
Optical flow technique is used for moving objects
tracking. It provides an apparent change of mov-
ing object location between two frames. It insulates
the moving objects from the static background ob-
jects. Optical flow estimation is represented by a two-
dimensional vector assigned to each pixen of the im-
age and represents velocities of each point of an im-
age sequence.
Optical flow was used in many works for mobile on-
jects tracking; (Garcia-Dopico et al., 2014) presents
a system for the search and detection of moving ob-
jects in a sequence of images captured by a camera
installed in a vehicle. The proposed system is based
on optical flow analysis to detect and identify moving
objects as perceived by a driver. The proposed method
consists of three stages. In the first stage, the optical
flow is calculated for each image of the sequence, as
a first estimate of the apparent motion. In the second
stage, two segmentation processes are addressed: the
optical flow itself and the images of the sequence. In
the last stage, the results of these two segmentation
processes are combined to obtain the movement of
the objects present in the sequence, identifying their
direction and magnitude.
(Indu et al., 2011) proposes a method to estimate vehi-
cle speed from video sequences acquired with a fixed
mounted camera. The vehicle motion is detected and
tracked along the frames using optical flow algorithm.
The distance traveled by the vehicle is calculated us-
ing the movement of the centroid over the frames and
the speed of the vehicle is estimated.
In many works, optical flow was combined with other
techniques. In (Guo-Wu Yuan, 2014), Optical flow
was combined with frame difference method. In this
work, optical flow for Harris corners is calculated, and
WINSYS 2019 - 16th International Conference on Wireless Networks and Mobile Systems
382
to localize the complete moving area, the method of
frame difference is used. Optical flow was used in
(DharaTrambadia, ) with background subtraction. In
this work, tracking of moving objects or persons is
done using Adaptive Gaussian Mixture Modeling and
optical flow. Adaptive Gaussian Mixture Modeling is
used for complex environment but it is not a complete
object tracking method, it is used with optical flow
which is used for simple background. The foreground
is extracted using Gaussian Mixture Modelling tech-
niques.
3 OPTICAL FLOW AND
TIMESTAMPING
This section deals with optical flow method descrip-
tion, and the need for timestamping optical flow in
vehicular context.
3.1 Optical Flow and Smart Cars
Optical flow gives the displacement of each pixel of
an image compared to the previous image. The dis-
placement vector is called optical flow vector. It is
used for motion segmentation for tracking moving ob-
jects. It is possible to find the moving objects in video
frames by calculating the value of optical flow. If the
value is significant, this means that the object is mov-
ing. If the value is very small, the object is static. In
1981, two differential-based optical flow algorithms
were proposed by Horn and Schunck and by Lucas
and Kanade. Horn’s algorithm assumes that the mo-
tion field is the 2D projection of the 3D motion of
surfaces. The optical flow is the apparent motion of
the brightness patterns in the image. The flow is for-
mulated as a global energy functional which is then
sought to be minimized.
E =
Z Z
h
(Ixu + Iyv + It)
2
+ α
2
k
∇u
k
2
+
k
∇v
k
2
i
dxdy
where I
x
, I
y
and I
t
are the derivatives of the image
intensity values along the x, y and time dimensions
respectively.
−→
V = [u(x, y), v(x, y)]
T
is the optical flow vector, and the parameter α is
a regularization constant. Larger values of α lead
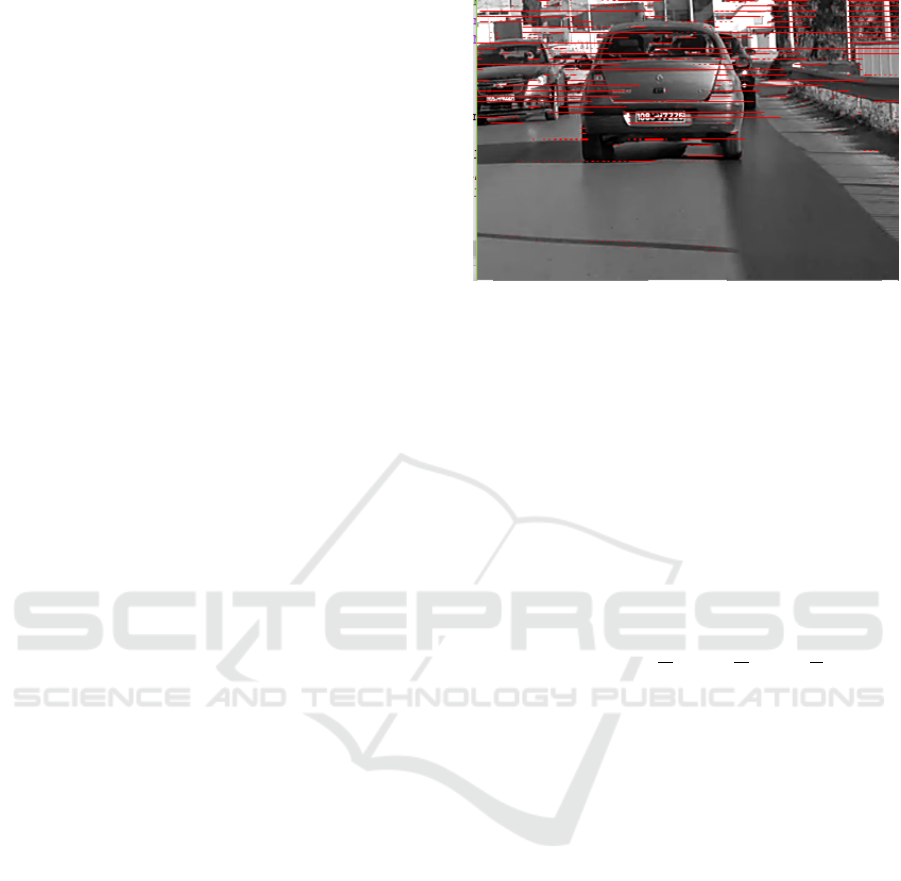
to a smoother flow. Figure 1 represents motion vec-
tors calculated using Horn and Schunck method for
video frames recorded with a static camera installed
on board a moving vehicle. Red lines represent opti-
cal flow vectors.
Figure 1: Optical flow vectors calculated with Horn and
Schunck Method.
The Lucas-Kanade approach assumes that the flow re-
mains constant in a local neighborhood of the pixel
under consideration, and solves the basic optical
flow equations for all the pixels in that neighbor-
hood by the least squares method. The Lucas-Kanade
algorithm computes the optical flow by calculating
the spatio-temporal derivatives of intensity of the im-
ages. This algorithm assumes that intensity of the im-
age remains constant between the frames of the se-
quence.
Using Taylor Series, the expression can be written as:
I(x, y, t) = I(x + dx, y + dy, t + dt)
I (x, y, t) = I (x, y, t) + (
∂I
dx
)dx + (
∂I
dy
)dy + (
∂I
dt
)dt
Ix × u + Iy × v + f t = 0 Optical flow equation
The optical flow equation can be assumed to be true
for all the pixels in a window centered at the point
p(x,y). Considering a window of [n × n] pixels:
Ix(p1)u + Iy(p1)v = −It(p1)
Ix(p2)u + Iy(p2)v = −It(p2)
.
.
.
Ix(pn)u + Iy(pn)v = −It(pn)
where p1, p2, ...., pn are pixels within the window,
and Ix(p1), Ix(p2), ..., Ix(pn) are the partial deriva-
tives of the image I according to the space variables
x,y and time t, measured at the point pi and the current
time.
Figure 2 represents motion vectors calculated us-
ing Lucas Kanade method for video frames recorded
with a static camera installed on board a moving ve-
hicle. Red lines represent optical flow vectors.
A New Trust Architecture for Smart Vehicular Systems
383
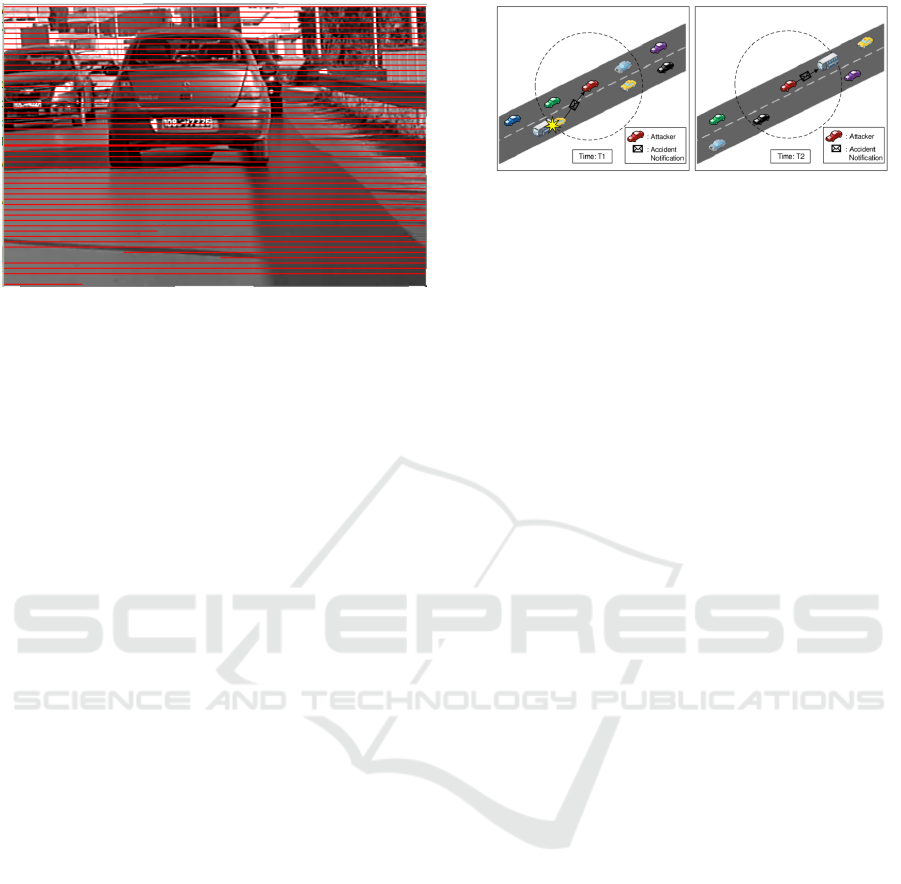
Figure 2: Optical flow vectors calculated with Lucas
Kanade Method.
3.2 Timestamping Architecture
VANETs are a key technology for enabling safety and
infotainment applications in the context of smart ve-
hicles. To connect smart vehicles, several issues must
be addressed. There are important issues related to
security. Various techniques are used to ensure se-
curity in VANETs, bellow we cite few cryptography
techniques:
• Public Key infrastructure (PKI): it is used for user
authentication. It is based on the use of a public
key, known by other users in the network and it
is used for message encryption, and a private key,
which is known only by the owner and is used for
message decryption. PKI is based on the use of
a Certification Authority (CA) that is charged of
issuing certificates, signing the messages digitally
and providing public and private keys to ensure
users authentication.
• Digital signature: Vehicle sends messages after
encrypting it using the receiver public key (to en-
sure data protection) then digitally signs it (to en-
sure data authentication)
• Timestamp series: This technique is used to pre-
vent Sybil attack in VANET. It is not possible
that two vehicles go through different RSUs at the
same time with the same timestamp. If a vehicle
sends a timestamp message that issued by passed
RSUs and this message has the same timestamps
series with other messages, Sybil attack will be
detected.
Generally, Timestamp is used in VANET to ensure the
message freshness. According to (Galaviz-Mosqueda
et al., 2017), packets sent in VANETs are commonly
composed by:
PACKET= (M, (sig
n
(M, T), Cert
n
)
sig
n
: Digital signature of node n over the concate-
Figure 3: Replay attack scenario.
nation of a message M and a timestamp T to ensure
message freshness to prevent replay attack.
Cert
n
: certification of node n.
Receiving node can verify packet authenticity by ver-
ifying the signature sig.
Figure 3 (Sakiz and Sen, 2017) illustrates a replay at-
tack, in which accident notification message gener-
ated and sent in T1 was sent a second time in T2.
4 PROPOSED APPROACH
(Wolfgang and Delp, 1998) presents an overview of
image security techniques with applications in multi-
media systems. Images can be protected againt illegal
uses using encryption, authentication and timestamps.
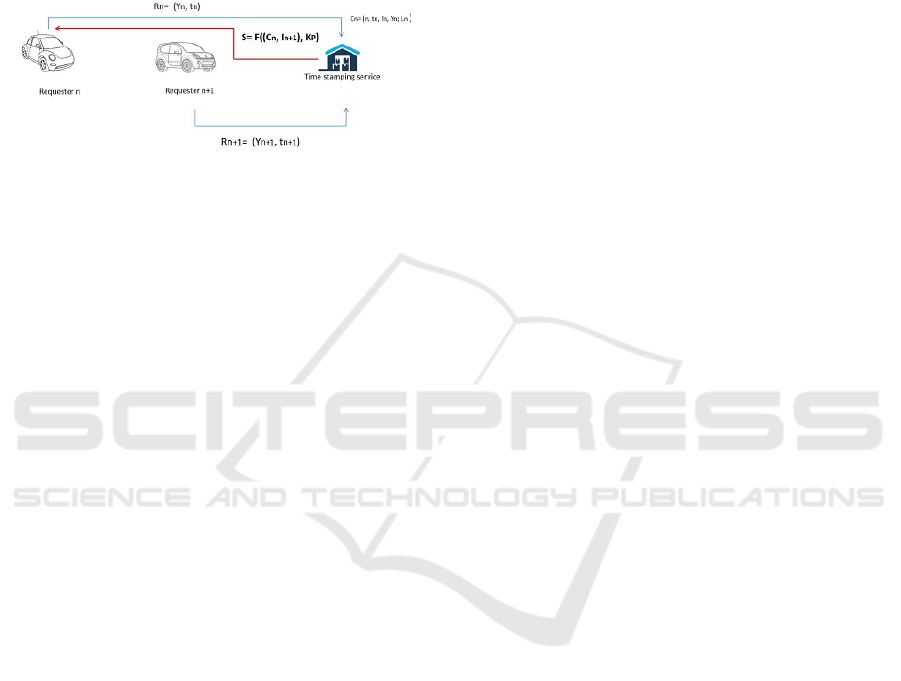
In this paper, we present a scheme for timestamping
optical flow matrix. Let OP be the data to be times-
tamped, and Y = H(OP) be the hash of OP. A request
named R, is sent to a third party timestamping service
(TSS) to ask for a timestamp. The syntax of the re-
quest is as follows:
(R
n
)= (Y
n
, t
n
)
The TSS then produces a certificate, C
n
:
C
n
= (n, t
n
, I
n
, Y
n
; L
n
)
L
n
= (t
n−1
, I
n−1
, Y
n−1
, H(L
n−1
))
• n: The request number
• I
n
: The owner’s identification string
• t
n
: the time of the request
• L
n
: The linking string, it is the concatenation of
the previous request time, the identity string, the
document hash and the linking string hash.
The TSS waits for the next request I
n+1
, then concate-
nates it to C
n
, the timestamp returned to the user is: S=
F((C
n
, I
n+1
), K
P
)
• F: The encryption function
• K
P
: The private key of the TSS
A requester for a timestamp authenticates in a first
step the TSS signature on the stamp. The requester
can then ask for I
n−1
(embedded in L
n
) to show her
timestamp. The quantities in L
n
must match those in
WINSYS 2019 - 16th International Conference on Wireless Networks and Mobile Systems
384
C
n−1
. The hash of L
n−1
must also match the value of
H(L
n−1
) present in L
n
. If any value does not match,
one of the two timestamps is false. In practice, the
linking string contains information from the last N re-
quests. This distributes the authentication responsi-
bility, since any one of the N requesters may verify
the timestamp. The proposed process is illustrated by
Figure 4.
Figure 4: Proposed process of timestamping optical flow.
5 CASE STUDY
Traffic accidents are confusing events. How they oc-
cur, who or what caused them, and why they occurred
are facts that police must determine. The accident
investigator plays an important role in the process of
investigation and reporting on the contributing factors
to an accident. His report is important to the police
services, traffic enforcement, vehicle owners and
insurance companies. The accident investigator uses
a wide variety of tools at the accident scene. There
are also vehicle technology that assist the investigator
in establishing the causes of the accident. Vehicle
blackbox can tell a lot of information concerning
the accident: Amount of travel prior to the accident,
driving style prior to the accident, speeds achieved
and maintained, unauthorised stops, speed, detail
prior to the accident, significant braking, . . . . It
tells also date, time, location, speed, distance and
engine Rpm. We take the example of an accident
that occurs and investigators use data saved in the
blackbox for investigation. The image with optical
flow vectors is used for marking the detected object
in the image/video frame. The ability to verify
the integrity of files is important for investigators.
Especially if files are to be used as evidence in court,
the ability to prove that a file existed in a certain state
at a specific time and was not altered since is crucial.
We propose the accident scenario illustrated by
Figure 5. The motorcycle tries to overtake the green
vehicle that changes direction and turn on the left.
(positions a and b). The result was a crash with the
red vehicle (position c) which captured the motorcy-
cle since it was trying to do the overtake operation.
Red vehicles uses blackbox system for recording
events that happen during the driving experience.
Mobile objects are tracked using the optical flow
technique. Optical flow matrix are stored in the
blackbox. Requests for timestamping are sent ac-
cording to the steps described in Section 4. Green
vehicle and red vehicle send the following requests
for timestamping:
(R
Gn
)= (Y
Gn
, t
n
)
(R
Rn+1
)= (Y
Rn+1
, t
n+1
)
Certificates are produced by Timestamping Service:
C
Gn
= (n, t
n
, I
Gn
, Y
Gn
; L
n
)
C
Rn+1
= (n+1, t
n+1
, I
Rn+1
, Y
Rn+1
; L
n+1
)
The timestamps returned to vehicles are:
SR= F((C
Gn
, I
Gn+1
), K
P
)
SG= F((C
Rn+1
, I
Rn+2
), K
P
)
• n: The request number sent by the green vehicle
• n+1: The request number sent by the red vehicle
• I
Rn+1
: The Red vehicle’s Identification string
• I
Gn
: The Green vehicle’s Identification string
• R
Gn
: Request sent by the Green vehicle
• R
Rn+1
: Request sent by the Red vehicle
• Y
Rn+1
: Hash of optical flow matrix recorded by
Red vehicle
• Y
Gn
: Hash of optical flow matrix recorded by
Green vehicle
• t
n
: the Time of the request sent by the green vehi-
cle
• t
n+1
: the Time of the request sent by the red vehi-
cle
• L
n
, L
n+1
: Linking strings
• C
Gn
: Certificate of Green vehicle
• C
Rn+1
: Certificate of Red vehicle
• SG: Timestamp returned to Green vehicle
• SR: Timestamp returned to Red vehicle
Motorcycle tracking is timestamped by TG and
TR described above. When analyzing saved data
in the red’s vehicle blackbox, investigator can
make sure that the crash occured after the green
vehicle tuns on the left and the motorcycle was
trying to overtake it, according to saved optical
flow in the red’s vehicle blackbox system that in-
dicates positions of the green vehicle and the mo-
torcycle.
A New Trust Architecture for Smart Vehicular Systems
385
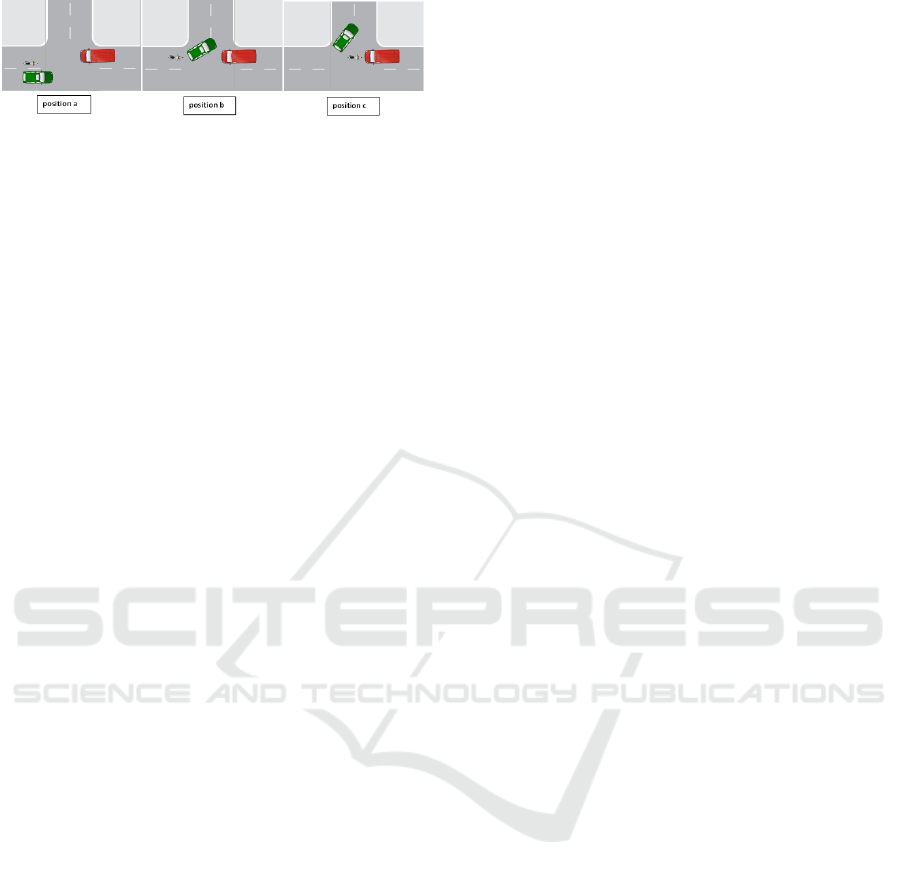
Figure 5: Accident scenario.
6 CONCLUSIONS
In this paper, we proposed to timestamp optical flow
used for mobile object tracking to be used as an au-
thentic trace for smart vehicle applications. We ex-
posed a timestamping process and we illustrate it by
a post-accident investigation use case.
REFERENCES
Agarwal, A., Gupta, S., and Singh, D. (2016). Review of
optical flow technique for moving object detection.
pages 409–413.
Broggi, A., Zelinsky, A., Parent, M., and E. Thorpe, C.
(2008). Intelligent Vehicles, pages 1175–1198.
DharaTrambadia, ChintanVarnagar, P. Moving object de-
tection and tracking using hybrid approach in real time
to improve accuracy. International Journal of In-
novative Research in Computer and Communication
Engineering, pages ISSN(Online): 2320–9801, ISSN
(Print): 2320–9798.
Galaviz-Mosqueda, A., Morales-Sandoval, M., Villarreal-
Reyes, S., Galeana-Zapi
´
en, H., Rivera-Rodr
´
ıguez,
R., and Alonso-Arevalo, M. A. (2017). Multi-
hop broadcast message dissemination in vehicular ad
hoc networks: A security perspective review. In-
ternational Journal of Distributed Sensor Networks,
13(11):1550147717741263.
Garcia-Dopico, A., Pedraza, J. L., Nieto, M., P
´
erez, A.,
Rodr
´
ıguez, S., and Osendi, L. (2014). Locating mov-
ing objects in car-driving sequences. EURASIP Jour-
nal on Image and Video Processing, 2014(1):24.
Guo-Wu Yuan, Jian Gong, M.-N. D. H. Z. D. X. (2014).
A moving objects detection algorithm based on three
frame difference and sparse optical flow. Information
Technology Journal, 13:1863–1867.
Gupta, T. P. (2015). Vehicle detention using high accuracy
edge detection. Int. J. Adv. Eng, 1(1):28–32.
Indu, S., Gupta, M., and Bhattacharyya, A. (2011). Vehi-
cle tracking and speed estimation using optical flow
method. Int. J. Engineering Science and Technology,
3(1):429–434.
Joshi, S. (2014). Vehicle speed determination using image
processing. In International Workshop on Computa-
tional Intelligence (IWCI).
N.Arun Prasath, G.Sivakumar, N. (2015). Vehicle speed
measurement and number plate detection using real
time embedded system. In Network and Complex Sys-
tems, ISSN 2224-610X (Paper) ISSN 2225-0603 (On-
line) Vol.5, No.3.
Sakiz, F. and Sen, S. (2017). A survey of attacks and de-
tection mechanisms on intelligent transportation sys-
tems: Vanets and iov. Ad Hoc Networks, 61:33–50.
Singh, T., Sanju, S., and Vijay, B. (2014). A new algorithm
designing for detection of moving objects in video. In-
ternational Journal of Computer Applications, 96(2).
Singla, N. (2014). Motion detection based on frame differ-
ence method. International Journal of Information &
Computation Technology, 4(15):1559–1565.
Wolfgang, R. B. and Delp, E. J. (1998). Overview of im-
age security techniques with applications in multime-
dia systems. In Multimedia Networks: Security, Dis-
plays, Terminals, and Gateways. Vol. 3228. Interna-
tional Society for Optics and Photonics.
WINSYS 2019 - 16th International Conference on Wireless Networks and Mobile Systems
386
