
Modular and Domain-guided Multi-robot Planning
for Assembly Processes
Ludwig N
¨
agele, Andreas Schierl, Alwin Hoffmann and Wolfgang Reif
Institute for Software & Systems Engineering, University of Augsburg, 86159 Augsburg, Germany
Keywords:
Multi-robot Systems, Robotic Assembly, Process Planning.
Abstract:
Smart factories of the future will be equipped with dynamic and task-specific teams of robots in order to
manufacture custom-tailored products. For this, it is necessary to facilitate the planning of appropriate task se-
quences for cooperating robots. In this paper, we introduce a modular and domain-guided planning approach
for multiple robots. Due to its modularity, the approach can be adapted to different assembly problems. More-
over, domain knowledge is used to guide the planning towards feasible solutions. We evaluate the approach
with different examples from the blocks world domain (i. e. LEGO
R
DUPLO
R
). This evaluation shows that
this domain-guided approach outperforms classical planning based on state space search such as A
∗
.
1 INTRODUCTION
Industrial robots offer high mechanical flexibility,
speed and precision as unique features compared to
other automation devices. Hence, they play an im-
portant part in the efficient automation of mass prod-
ucts with relatively low variability, e. g., in the auto-
motive industry. In order to make industrial robots
efficiently usable in small-lot production, a lot of re-
search has been performed, e. g., on increasing the
inherent flexibility of robots by sensor systems and
associated control algorithms (Albu-Sch
¨
affer et al.,
2007; Finkemeyer et al., 2010) or on new methods
for efficiently bringing robots into operation (Malec
et al., 2007; Andersen et al., 2015).
According to the ideas of Industry 4.0 (Kager-
mann et al., 2013), smart factories of the future are re-
quired to manufacture custom-tailored products with
high variability in small lot sizes. As a matter of
fact, the requirements of a smart factory can only
be fulfilled by dynamic and task-specific coopera-
tion of several robots (Gl
¨
uck et al., 2018). Building
robot teams with appropriate, possibly exchangeable
tools leads to multi-functional robot cells with dras-
tically increased flexibility, performance and robust-
ness (Angerer et al., 2015).
However, further steps have to be taken to har-
ness the flexibility and adaptability of multiple robots
for smart factories. Especially, the development of
control software for the robot team working together
on manufacturing a specific product must be facil-
itated. Hence, we present a modular and domain-
guided planning approach for multiple robots in this
paper. As a result of this planning, a control software
for the robot team is synthesized.
The main contribution of our planning approach
is that it is both modular and domain-guided. This
means that the product to manufacture is analysed by
domain-specific modules and is broken down into ba-
sic components and their relationship. Based on that,
possible sequences of domain-specific tasks are found
by the planning algorithm. In a further step, these do-
main tasks are used to find appropriate sequences of
automation tasks based on the available robots and au-
tomation devices as well as their skills. Hence, the
search space can be reduced and possible planning
problems such as deadlocks can be avoided.
The paper is structured as follows: In Section 2,
related planning approaches are introduced, followed
by Section 3 which outlines the domain that will be
used for describing and evaluating our approach. Sec-
tion 4 introduces the idea of our modular planning ap-
proach, whereas the algorithms are explained in Sec-
tion 5. The approach is evaluated in Section 6. Fi-
nally, a conclusion and outlook is given in Section 7.
2 RELATED WORK
Almost since its beginning, planning has been a topic
of great interest in computer science. Back in 1971, at
Nägele, L., Schierl, A., Hoffmann, A. and Reif, W.
Modular and Domain-guided Multi-robot Planning for Assembly Processes.
DOI: 10.5220/0007977205950604
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 595-604
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
595

SRI International the STRIPS formalism has been de-
veloped (Fikes and Nilsson, 1971), describing states
of the environment and the prerequisites and results of
actions. This formalism has been the base for many
planning systems that work by searching the state
space. To simplify transferring planning problems
between different planners, the PDDL language has
been developed (McDermott et al., 1998) that serves
as input language to many current planners.
However, this kind of planning suffers high time
complexity due to the large branching factor caused
by the great amount of possible actions. To im-
prove performance, different optimizations have been
introduced. One way is to use heuristics to guide
the search, such as in the A
∗
algorithm (Hart et al.,
1968), which however require fine-tuning for certain
domains. Another way has been to automatically de-
rive levels of abstractions to be used for planning,
as with ABSTRIPS (Knoblock, 1990; Giunchiglia,
1999). When working with multiple robots, the num-
ber of possible actions is vastly improved, so mecha-
nisms using constraints and resources to guide paral-
lel tasks have been proposed (Wilkins, 1984). How-
ever, these approaches still fail for large planning
problems, while not using the abstractions that nat-
urally exist in the planning domain that could help
solve the problem in a more directed manner.
Planning is sometimes performed through task
decomposition, where complex tasks are decom-
posed into (alternative) sequences of simpler tasks.
Here, the formalism of Hierarchical Tasks Networks
(HTNs) has found widespread use (Nau et al., 2003).
In contrast to search-based planning, HTNs need
more domain-specific knowledge but scale better for
larger problems because they can use levels of ab-
straction present in the planning domain.
In the field of manipulation and assembly plan-
ning, different approaches have been described, in-
cluding topics such as handing over objects from one
robot to another (Koga and Latombe, 1994) and find-
ing appropriate assembly sequences to build desired
structures (Thomas and Wahl, 2001). Additionally,
such topics have been addressed with mobile robots,
where task allocation based on spatial deliberations
play an important role (Stein et al., 2011; Schoen and
Figure 1: Specialized gripper clamps have been developed
to enable process-reliable grasping of duplo bricks.
Rus, 2013; Knepper et al., 2013).
When looking at current planning systems for
multi-robot environments, task decomposition is of-
ten performed manually or through HTNs, while task
allocation is performed in a search based manner (Yan
et al., 2013). The same aspect can be found in the
field of combined task and motion planning, where
planning is performed on two levels of abstraction,
mixing HTNs for task planning with search based ap-
proaches for collision-free motion planning (Wolfe
et al., 2010).
This paper extends previous work of the authors
(N
¨
agele et al., 2015; Macho et al., 2016; N
¨
agele
et al., 2018) in the field of automatic assembly plan-
ning, using concepts from the aforementioned pa-
pers while making the previous solutions applicable
to more complex assembly problems.
3 CASE STUDY
One main research goal of the authors is to fully
automatize planning and manufacturing of large
plane parts made of carbon-fibre reinforced polymers
(CFRP) with industrial robots (Gl
¨
uck et al., 2018).
However, this domain makes it hard to clearly show
the contributions and benefits of the presented con-
cepts to a wider range of non-experts. For this rea-
son, use-cases have been developed in the well-known
and properly defined blocks world domain of LEGO
R
DUPLO
R
. Here, it is possible to construct scenarios
with intuitive problem definitions that show specific
planning challenges. Since problem definitions are
similar throughout most domains of assembly, con-
cepts to solve duplo problems can be transferred to
more complex domains of assembly such as the one
of CFRP.
For the case study with duplo, a robot cell with
two robots (KUKA LBR iiwa and KUKA LWR 4) is
used, each equipped with a Schunk WSG 50 gripper.
For reliably handling duplo bricks with these grip-
pers, specialized clamp extensions have been devel-
Figure 2: Virtual model of the robot cell containing two
robots equipped with grippers, a duplo ground plate and an
additional plate for supplying bricks.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
596

(a) Duplo house structure (b) Deadlock scenario
Figure 3: A duplo house as an example for assembly plan-
ning (a). A missing cornerstone as cause for deadlocks (b).
oped and manufactured using 3D printing (see Fig-
ure 1). The clamps are designed to perfectly match
the contour of duplo bricks and have rubber pads act-
ing as anti-slip contact surface. A duplo ground plate
and an additional plate for supplying bricks are also
part of the robot cell.
For automated planning with robots, spatial infor-
mation about actuators and objects in the robot cell
can be used to obtain additional data such as colli-
sions, reachability by robots or expected movement
distances (and durations) to specific targets. The vir-
tual model of the robot cell used for the case study is
shown in Figure 2. To illustratively show represen-
tative difficulties for the planning of assembly tasks,
two duplo structures are used which are presented in
the next two sections.
3.1 Duplo House Structure
Figure 3a shows a house made of duplo bricks, having
a lower part forming a door and windows, and a roof
constituted by stacked bricks aligned as a pyramid.
Assuming a cornerstone not yet placed as depicted
in Figure 3b, placement by a parallel gripper will re-
sult in a collision between the gripper’s clamps and
one of the bricks placed next to it. Grippers with an-
other grasp strategy may however be able to place this
brick though, for example by holding it with vacuum
from top. Nevertheless, the available grippers cannot
place this brick in the given scenario. Although fur-
ther bricks can still be placed on top, it will inevitably
lead to a deadlock.
Such deadlock causes, which are not yet obvious
at the time they occur, can still allow a huge num-
ber of subsequent planning steps until each of them is
finally stuck later on. The duplo house scenario de-
notes a general planning problem which is not only
dependent on the current setup and the domain but
also on the actuators’ capabilities and their charac-
teristics, such as their reachability. Efficient planners
must address the challenge of deadlock detection in
an early stage.
(a) Duplo stairway structure (b) Supporting the structure
Figure 4: A duplo stairway (a) as an example for the need
of cooperation between robots with different skills (b).
3.2 Duplo Stairway Structure
As a second example for planning challenges, a stair-
way made of duplo bricks has been designed as shown
in Figure 4a. When it comes to overhanging struc-
tures, the entire structure may tend to become increas-
ingly unstable. Not only the intrinsic stability of the
structure but especially the increased force when plac-
ing a brick on top needs to be considered in order to
guarantee a reliable, non-collapsing assembly.
In both cases some kind of external help is needed
at a certain point. This can for example be achieved
by cooperating robots: a supporting robot with its
gripper clamps positioned below the brick on which
the other robot places the new brick (see Figure 4b).
To continue assembly, robots need to seamlessly sup-
port the stairway in a coordinated alternating manner
to avoid the construction collapse while further bricks
are added.
For assembly planning in general, this scenario
illustrates a couple of different challenges. Besides
the identification of invalid states (i. e. unstable struc-
ture), adequate helper tasks need to be scheduled at
suitable points to ensure a successful assembly pro-
cess. Based on that, the key task is to coordinate
actuators to manage execution of both, tasks making
progress as well as pure supporting tasks, and to ar-
range this kind of implicit cooperation. Furthermore,
it has to be considered that during the time robots per-
form supporting tasks, they are temporarily occupied
and cannot perform other tasks. All in all, this en-
ables a huge opportunity of optimization possibilities
a planner can incorporate.
4 MODULAR PLANNING
When planning the assembly of products with robots,
there are mainly two steps to be considered: First, ac-
tions required to build the final artefact must be de-
rived from a construction plan (e. g. CAD). This de-
cides ”what to do” with the single parts of the artefact
(products), i. e. which abstract processes have to be
Modular and Domain-guided Multi-robot Planning for Assembly Processes
597
applied to the products, and possibly even which par-
tial order of such actions is must be respected. Com-
pared to a human who is building a duplo house, it
means looking at the cover picture showing the fi-
nal house and planning a mental strategy about which
bricks may be placed in which order. In industrial ap-
plications, such construction decompositions are done
by domain experts who know about all special char-
acteristics and restrictions of the respective domain.
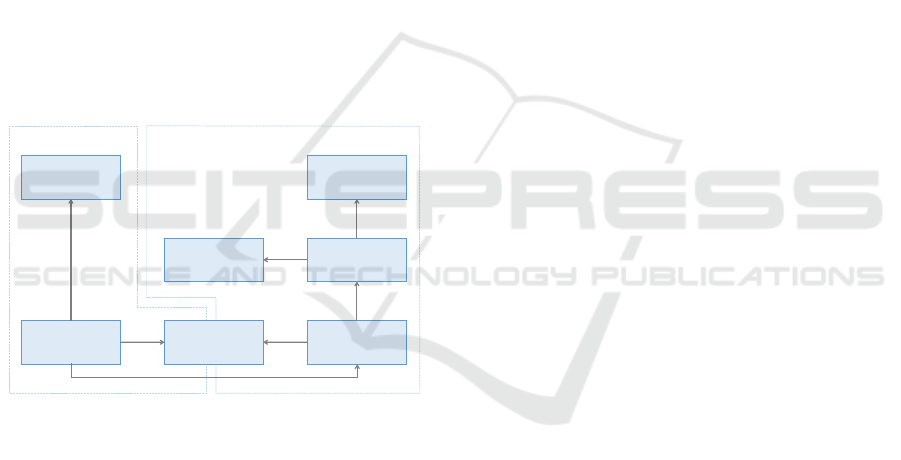
Figure 5 describes such a Domain Task as a relation-
ship between a Domain Process, which is the type of
task, and a set of Products on which the process is
applied (e. g. “Stick together” and “brick1, brick2”).
So far, this process is completely independent
from any robotic device yet. But in a second step,
the question ”how to do” all such actions in practice
has to be answered. In the duplo example, it is the
human searching for the next brick, grasping it with
his fingers, moving it close to the underlying brick
and carefully sticking them together. In industrial
applications, these actions are usually performed by
robots which have been programmed by process and
automation experts.
Domain
Process
Domain Task
Automation
Process
Automation
Task
SkillResource
Product
1
1..n
*
*
1
1
1..n
Domain
Automation
Figure 5: Overview of the different conceptual parts in both
fields domain and automation.
In analogy to the domain field in Figure 5, a
concrete action in the automation field performed by
robots and affecting particular products is called Au-
tomation Task. Also here, the task is a specific im-
plementation of a process – in this case an Automa-
tion Processes – applied on specific products. But
since automation processes, in contrast to domain
processes, are to be performed by some actuating el-
ements (called Resources), an additional indirection
step named Skill is introduced, which represents the
capability of a given set of resources to perform a
certain automation process. A skill, in turn, can be
used to derive specific automation tasks when applied
to products. A robot that can perform an automa-
tion processes “Grasp”, for example, is capable of a
skill “Grasp by robot” and may lead to a specific task
“Grasp product x by robot”. This nomenclature used
for the automation field is widely based on the defini-
tion of PPRS (Pfrommer et al., 2013).
Different mechanisms are required to retrieve a
valid assembly program from a construction plan.
While domain, process and automation experts usu-
ally define process flow and robot programs by hand,
the presented approach aims at experts transferring
their knowledge into different kinds of modules in-
stead. Such modules are meant to be independent
from each other and are capable of bringing additional
information about either the domain or automation
into the planning process. Some are responsible for
providing valid domain tasks for a construction plan,
others allow to derive appropriate automation tasks
for them, and others may validate the structural com-
position of products, for example. In the following
sections, after a short introduction to modeling, three
kinds of modules are presented which are used in the
planning algorithm described in Section 5.
4.1 Modeling with Attributes and
Situations
In recent work, the authors presented their idea of how
to describe the spatial model of robots and products
by Attributes and how this description can be derived
from a construction plan (N
¨
agele et al., 2018). In a
nutshell, for the area of assembly these attributes are
either a spatial position of one or a spatial relation-
ship between several products and may also contain
additional information about a specific type of rela-
tionship. An attribute describing two duplo bricks be-
ing stacked holds their position relative to each other,
but also gives an idea about how the attribute needs to
be performed when established: an orthogonal move-
ment of the bricks and applying light pressure.
All attributes which are present at a specific point
of time form a common set called Situation. Besides
a goal situation, which represents the finished con-
struction plan, each assembly process also has an ini-
tial situation, in which the assembly starts, as well as
many intermediate situations during assembly.
The authors introduced Analyzer Modules which
convert a construction plan to a corresponding goal
situation (N
¨
agele et al., 2018). The construction plan
is analyzed for contained products, and their related
attributes are detected, e. g. by spatial investigation.
The concept of analyzer modules is a prerequisite and
implicit part to the overall concept presented here.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
598

4.2 Identifying Domain Tasks
When automatically planning the assembly of prod-
ucts, one element essential to the planning mechanism
is knowledge about the domain. This includes a suf-
ficient specification of domain processes, which are
relevant in order to describe an entire assembly pro-
cess. They are to be specified by experts of the re-
spective domain. They are more like a unique name
and do not contain any logic. From a set of available
domain processes and a given goal, appropriate do-
main tasks are to be retrieved which are applied on
specified products.
Each domain task has an impact on the previous
situation on which it is performed, and finally results
in a new situation being valid afterwards. This in-
volves attributes which are established, but also at-
tributes which are potentially removed. Since domain
tasks only focus on related products but do not take
robotic devices into account, their actual impact is
rather idealized and inside the domain perspective.
The discovery of domain tasks is the key purpose
of domain-task identifier modules. Implemented by
domain experts, they analyse the given construction
plan (in detail the difference between initial and goal
situation) and identify suitable domain tasks needed
for the assembly, and maybe even potential alterna-
tive. Domain-task identifier modules furthermore can
determine constraints such as temporal dependencies
among them. From another perspective, this gives a
definition of alternatives to reach the goal with a qual-
ified set of degrees of freedom. It is important to keep
these alternatives in this stage. In a later planning step
it might be necessary to fall back on alternatives if one
of them does not lead to a valid result. Considering
the partial order of all found domain tasks, the over-
all resulting attribute change must be a valid transfer
from the given initial situation to the goal situation.
For the examples with duplo, one domain process
“process a brick” has been specified which means as
much as everything that has to be done in order to
bring a brick to its target position. This may include
collecting it from a magazine, pick up, move and
place. Additionally, a domain-task identifier module
has been developed which constructs a domain task of
this type for each single brick. As domain-specific or-
der for assembly, dependencies between the tasks are
added in a way that underlying bricks are enforced to
be built before.
4.3 Identifying Automation Tasks
For each identified domain task, corresponding au-
tomation tasks have to be found which map the de-
sired behaviour of the domain task to specific automa-
tion programs. This is where automation-task identi-
fier modules come into play. There are two options
for experts to provide such modules:
The first type of module is a predefined mapping
between a domain process and an equivalent graph
of automation processes. This more or less hard-
coded correlation is commonly specified by experts
of both fields, domain and automation. In the duplo
example, the domain process “process a brick” could
be translated to a sequence of automation processes
“supply a brick”, “grasp a brick” and “place a brick”,
for example, all designated to be performed on the
respective brick. For each robot capable of perform-
ing such automation processes, appropriate skills are
offered by automation experts. From all skills avail-
able, automation processes are then translated to con-
crete tasks which can actually execute the processes.
Of course, different skills may apply for the same au-
tomation processes and thus different options are eli-
gible to choose from, such as different robotic devices
or the concrete process representation. Even a skill it-
self may provide multiple tasks with different process
parameters each. The proper selection of possible and
valid variants is a challenge faced by the planning al-
gorithm described in Section 5.
The second type of automation-task identifier
modules works rather dynamically instead of using a
fixed mapping. Given a domain task and the current
situation in which the task is to be applied, its impact,
i. e. the attributes being established or removed, can
be used to derive an ideal resulting situation (goal)
valid after the domain task. The same can be done
with automation tasks: applied to the current situa-
tion, their resulting situation can be tested whether it
approaches to the domain task’s goal. This way, a
sequence of automation tasks may be a valid substi-
tute for the domain task. But even then, due to the
inclusion of actuator attributes, the overall attribute
change of automation tasks is more specific than the
ideal one from the domain’s task. Thus, when check-
ing suitability of automation tasks for a domain task,
resulting situations have to be compared without con-
sidering attributes related to any resource. For the
general approach, all possible tasks have to be consid-
ered by all skills for all resources and for all products
for each situation. Because a complete computation
of the entire set of possibilities would be very expen-
sive, a rather promising strategy for finding eligible
and optimal tasks is preferable. Since the behavior
of general automation-task identifier modules is the
same for all domain tasks having no applicable fixed-
mapping module, it has a default implementation as
part of the planning algorithm.
Modular and Domain-guided Multi-robot Planning for Assembly Processes
599

4.4 Verifying Situations
During planning of assembly processes, many dif-
ferent tasks and situations are identified and investi-
gated. When skills are used to provide new automa-
tion tasks, several checks regarding resources and
processed products may be performed in order to re-
ject invalid tasks, for example when a grasp target is
outside of the range of a robot. However, the effect
of automation tasks on raw domain-specific proper-
ties of the product-structure are not necessarily con-
sidered by all skills. While the placement of a fur-
ther brick on top of a duplo stairway may be a valid
automation task, the bridge itself might collapse sub-
sequently due to its own overhanging weight. The
very same task, however, would be valid in a situa-
tion where another robot is supporting an underlying
brick. To prevent invalid programs and to enforce
domain-specific preconditions such as implicit sup-
port assistance, automation tasks and their resulting
situations need to be checked for these domain-only
properties.
For this purpose, situation verifier modules can be
contributed to the planning algorithm to validate re-
sulting situations of tasks and to reject them where
applicable. The main purpose of situation verifier
modules is to enable global domain-specific checks.
One or more modules can be contributed by domain
experts. But also checks regarding automation can be
performed by these modules, such as collision checks.
An implementation of a respective situation verifier
module by an automation expert makes an equivalent
consideration in every single skill obsolete.
In the duplo example, a situation verifier module
performs statics analysis on duplo structures in order
to detect fragile constructions. Since a realistic
physics simulation would vastly extend the planning
time – it has to be performed on every single situation
found – a rather lightweight approximation has been
chosen which at least suits our case studies. The goal
is to investigate all bricks from a top view and deter-
mine if their underlying support is sufficient. Straight
towers are easy to identify as stable constructions, but
also unobvious constructions like bridges with bricks
hanging in between shall be classifiable. For this
approach, the single pins of bricks are classified as
stable if they are capable of carrying another brick on
top. If every single brick has at least one stable pin,
the entire structure is assumed to be stable. Algo-
rithm 1 illustrates how the check is being performed.
First of all, bricks are marked as fixed if they have an
attribute to any base plate or a support attribute to a
robot (line 3). Then, each brick laying on a cycle-free
Algorithm 1: Duplo stability check.
Result: Whether a structure is stable
Input : B: set containing all bricks
P: set containing all pins
pinsO f (b ∈ B) ⊆ P: pins of a brick
Output: Whether every brick has at least one
stable pin
1 F
B
⊆ B: bricks marked as fixed;
2 F
B
←
/
0;
3 foreach b ∈ B do
4 if b has attribute to baseplate or b has
support attribute then
5 F
B
← F
B
∪ {b};
6 foreach b ∈ B, b /∈ F
B
do
7 if b on cycle-free path between b
1
and b
2
,
b
1
,b
2
∈ F
B
and b within convex top-view
hull of b
1
and b
2
then
8 F
B
← F
B
∪ {b};
9 Function stablePinsOf(b):
10 if b ∈ F
B
then
11 return pinsO f (b);
12 else
13 S
P
⊆ P: stable pins of lower bricks;
14 S
P
←
/
0;
15 foreach lower brick as b
1
do
16 S
P
← S
P
∪ stablePinsO f (b
1
);
17 hull = convexHullXY (S
P
);
18 pins = pinsO f (b);
19 return pinsWithinXY (pins, hull);
20 return ∀b ∈ B. ∃p ∈ stablePinsO f (b);
path of attributes between any two fixed bricks is also
marked as fixed if it is within the convex hull of these
from a top-view perspective (line 6). This enables
spanning constructions like bridges. Based on the
identified fixed bricks, stable pins are identified in a
second step (line 9). Pins of fixed bricks are all in-
herent stable. For other bricks, a convex hull from
top-perspective containing all stable pins of their im-
mediately underlying bricks is spanned. All pins of
the brick covered by this convex hull are also classi-
fied as stable.
A second module discovers collisions between du-
plo bricks, which can mainly occur after placements.
One would expect that this check is performed by the
place skill itself, and that tasks with collisions are di-
rectly rejected. However, the chosen design allows to
clearly divide the responsibilities of different experts,
in this case an expert in maths and collision computa-
tion without knowing anything about robots or duplo.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
600

5 MULTI-ROBOT PLANNING
ALGORITHM
Using these kinds of modules, automatic planning for
the corresponding domain can be performed. After
analyzing the goal situation, corresponding domain
tasks are identified on an abstract level. For each do-
main task, automation tasks are derived that reach the
goal given by the domain task.
5.1 Robot Cooperation Planning
In the proposed approach, three different types of
robot cooperation can occur:
(1) Two robots can explicitly cooperate by execut-
ing one automation task together, e. g. when grasping
one part on two sides and cooperatively carrying it
using two robots. In this case, cooperation is handled
within one skill, while planning only has to make sure
that in the meantime none of the robots has to perform
another task.
(2) As a more implicit type of cooperation, one
robot skill may depend on another robot executing or
having executed a certain other task. For example, a
placement operation can require another robot to sup-
port the existing structure to make sure it can with-
stand the pressure exerted by placing a brick. This
type of cooperation becomes visible to the planning
algorithm because it spans multiple unrelated tasks.
(3) Independent tasks of multiple robots can be
performed at the same time, thus reducing the over-
all execution time. This type of cooperation has to
be considered when comparing the cost for different
solutions, and has to consider aspects such as colli-
sion avoidance when working in tight spaces. In this
field, the implementation described in this paper uses
a simple form of resource-based parallelization, how-
ever this aspect is not central to the topic of this paper
and will not be explained in detail.
When performing planning with multiple robots,
these aspects cause long planning times in algorithms
performing state space search: on the one hand, many
tasks can be performed by different robots, so that the
branching factor grows with the number of capable
robots. Besides, multi-step sequences can be inter-
leaved, so that deadlocks in one multi-step sequence
can only be detected after ending all parallel tasks. On
the other hand, when optimizing for plan duration, ac-
tions that can be executed in parallel may not require
any further time because the corresponding robot is
idle at that time. In this case, many plans with the
same execution duration exist to choose from.
5.2 Domain Task Planning
To overcome these specific difficulties, a two-level
planning mechanism is used. First, planning is per-
formed on the level of domain tasks (that are later re-
solved into multi-step sequences of automation tasks).
Therefor, domain-task identification modules enu-
merate the domain tasks possible for a given situa-
tion and proceeding towards the global planning goal.
For one of these domain tasks, the algorithm estab-
lishes an optimal automation task decomposition as
described in Section 5.3. Using this domain task and
automation task decomposition, search is continued.
If no domain task is possible in a situation, the algo-
rithm backtracks and continues with another domain
task possible in the previous planning step.
As a further improvement towards assembly tasks
(that only build up structures but do not disassemble
parts), a special variant of backtracking is applied:
whenever the search for an automation task decompo-
sition of a domain task that should be possible fails,
the algorithm assumes that the domain task has be-
come impossible by one of the previously executed
domain tasks (that now blocks the way). Thus, it
backtracks the plan, and after each step checks if this
specific domain task has become possible again, omit-
ting all other tasks that might also be executed at that
specific step. This way, the algorithm shortens the
plan until either the domain task becomes possible –
where it continues – or the domain task is no longer
identified as possible by the domain-task identifica-
tion module – then the other possible domain tasks
are evaluated. This kind of backtracking helps in early
detection and prevention of the corner stone deadlock
seen in the house structure, where the algorithm re-
moves bricks until the corner stone can be placed.
5.3 Automation Task Planning
After choosing a domain task, either a predefined de-
composition is used, or state space search is applied to
find a corresponding automation task sequence. For
this, an implementation of the A
∗
algorithm is used,
using plan execution duration and task quality as cost
function. However, search is not performed in the full
state space, instead only actions relevant to the chosen
domain task are allowed. The corridor of relevant ac-
tions for a domain task is based on two aspects: first,
the automation task has to affect at least one product
mentioned in the domain task. The notion of affected
products is clear for product-related tasks such as pro-
viding, picking or placing a brick, but less clear for
support actions (that are defined to affect any brick
above). Additionally, automation tasks affecting at-
Modular and Domain-guided Multi-robot Planning for Assembly Processes
601

tributes that are defined to be key of another domain
task are forbidden. For the type of domain tasks used
here, these mainly include placement attributes be-
tween bricks, so that valid automation tasks may not
assemble or disassemble other parts of the structure.
In detail, for a situation all possible skills are
asked to provide tasks with specific process param-
eters. For picking and placing, the skill for one robot
provides individual tasks for different grasp positions.
On this level, for tasks that have same result (e. g.
placing a brick that has been picked up at different
grasp positions) only the one with lowest cost is con-
sidered, whereas tasks that have different results (e. g.
supporting a specific brick from different sides) are
considered independently. This optimiziation helps
to reduce the search space, while still allowing to find
solutions that are only possible when using the right
kind of support. Additionally, situation verifier mod-
ules are applied after each step to reject invalid situa-
tions, e. g. if the structure built is not statically stable.
Planning for a given domain task, state space
search finishes once a sequence of automation tasks
has been found that fulfills the requirements defined
by the domain task (e. g. the chosen brick has been
placed at the desired position). This sequence may es-
tablish further environment changes (e. g. robots still
supporting the structure), but only if they do not inter-
fere with other domain tasks (e. g. placing or remov-
ing another brick from the structure is forbidden).
Using this corridor of allowed actions, the plan-
ning algorithm makes sure that all planned steps be-
long to the task at hand, so that no irrelevant inter-
leaving of multiple domain tasks has to be considered.
This effectively reduces the search space, allows to ef-
ficiently detect impossible domain tasks, and makes it
possible to handle parallel execution of independent
domain tasks at a later planning (or execution) stage.
6 EXPERIMENTAL RESULTS
To evaluate the presented approach for planning as-
sembly processes, a classical A
∗
solving approach is
used as baseline to compare the results of the pre-
sented multi-robot planning algorithm (MRPA) with.
Both case studies, the duplo house and the stairway,
are planned with an A
∗
solver and the MRPA con-
cepts each. The A
∗
implementation uses domain task
and automation task options as transitions whereas
situations represent states. It chooses from available
domain tasks provided by the domain-task identifier
module and further repeats choosing from possible
automation tasks within the scope of the respective
domain task to solve it. Once the goal of a domain
task is reached, again all possible next domain tasks
are eligible for the next step in A
∗
.
All situation verifier modules are used in both ap-
proaches similarly to detect invalid solutions. The
cost of automation tasks is determined by their quality
and in a secondary role by their execution time. For
A
∗
, also an estimator is required which gives a guess
about expected future cost from a given state. The
cost of all previous tasks and the estimation is used as
expected cost. For duplo, the implementation of the
cost estimator is rather domain- and robotic-specific
and estimates future cost by the number of bricks still
to be provided or pick-and-placed and slightly under-
estimated average cost of respective tasks.
Both solver approaches base on cost for selection
of solution paths. In case of cost equivalences, both
algorithms are free which one to select next to inves-
tigate. The freedom of choice combined with random
decision-making inherently bears indeterminism for
the solution found as well as for the overall planning
time. One evaluation running into a series of dead-
locks owing to “unlucky” random decisions might be
far worse than another run with only “lucky” deci-
sions. For this reason, each case study is evaluated
100 times on each algorithm to retrieve statistically
meaningful results. Once a solution is found which
represents a valid result, the run is terminated. For A
∗
this can mean that the very optimal solution is not de-
termined early enough in some cases, especially when
cost-equal options are being evaluated. Thus, A
∗
is
expected to finish with only a close-to-the-best solu-
tion in favor of shorter planning times, which is al-
right for this evaluation. This explains a possible stan-
dard deviation other than zero for the execution time
of identified solutions. In general, evaluation runs
lasting longer than 300 seconds usually lead to even-
tual heap memory problems without returning valid
results. These runs are canceled and not considered
in the statistical results.
To satisfy the multi-robot purpose, the robot cell
as described in Section 3 is used for the evaluation.
All evaluation runs, completely implemented in Java,
have been executed on a Windows machine with an
Intel(R) Core(TM) i7-7600U (2.80GHz) and 24 GB
RAM. Table 1 gives a summary of all measured val-
ues, each with an average value, min and max occur-
rences, and a computed standard deviation.
6.1 Deadlock Detection And Prevention
The purpose of the duplo house case study is to
illustrate deadlocks which can not be identified in
the moment they arise. Additionally, a light form
of multi-robot cooperation is addressed with assign-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
602

Table 1: Evaluation runs for duplo house and stairway, each applied to A
∗
and the multi-robot planning algorithm (MRPA).
Duplo house Duplo stairway
A
∗
MRPA A
∗
MRPA
Evaluation runs
Successful 73 100 100 100
Timeout (>5min) 27 0 0 0
Planning time
Average 3.957 s 0.314 s 7.653 s 0.332 s
Min - Max 0.299 - 81.004 s 0.204 - 1.361 s 7.340 - 8.685 s 0.270 - 0.671 s
Std. deviation 12,425 s 0.101 s 0.101 s 0.000 s
Investigated
automation tasks
Average 1109 209 16840 610
Min - Max 246 - 21642 179 - 567 16810 - 16912 610 - 610
Std. deviation 3368 47 19 0
Observed
unique situations
Average 533 62 2013 66
Min - Max 59 - 10822 52 - 217 2010 - 2017 66 - 66
Std. deviation 1659 20 1 0
Solution length
(automation tasks)
Average 52 52 45 45
Min - Max 52 - 52 52 - 52 45 - 45 45 - 45
Std. deviation 0 0 0 0
Solution
execution time
Average 107.000 s 106.722 s 114.679 s 115.624 s
Min - Max 104.533 - 109.536 s 103.843 - 109.998 s 114.472 - 114.861 s 115.423 - 115.810 s
Std. deviation 0.993 s 0.980 s 0.000 s 0.000 s
ment of tasks and coordination of exclusively allocat-
able workspaces and thus basic collision avoidance.
Collision-free motion planning for transfer tasks is
not considered in this stage. Table 1 shows the results
of planning the house with A
∗
. 27% of all runs did not
terminate within the first 300 seconds because they
run into the cornerstone-deadlock problem too often
and waste time with planning on wrong premises. The
other 73% had a fairly good planning time of almost
4 seconds. However, the random occurrence of time-
waste within deadlocks causes a high standard devi-
ation of more than 12 seconds. Compared to this,
MRPA states a better average planning time and a far
smaller standard deviation of it due to the detection
and prevention of deadlocks. Both approaches result
a solution with the same amount of automation tasks.
Although MRPA seems to find a better solution with
a shorter execution time compared to A
∗
, the solution
may contain more sidewards offset grasps of bricks
which is considered to cause bad cost.
6.2 Multi-robot Cooperation
In order to assemble the duplo stairway, a robot is
needed supporting before a brick can be placed. This
use case mainly exemplifies the capability of com-
posing independent skills to perform tasks neither of
the skills could execute solely. One difficulty here is
that selecting a support task does not involve an im-
mediate profit in fitness. Only in a later state, e. g.
when a placement is now possible, the profit appears.
This results in a kind of temporary blind search for
both, A
∗
and MRPA. Since MRPA does not optimize
globally (on domain task layer), such cooperations
by independent skills might not be solved optimal.
While A
∗
finds solutions with better execution times
for the stairway, MRPA however investigates far less
automation tasks and situations and thus saves plan-
ning time. Because all domain tasks need to be se-
lected sooner or later, a prioritization of cheap ones
and thus the finding of slightly better solutions might
not seem worth the far worse planning time and thus
is left out in MRPA. However, rare cases exist where
omitting global optimization may lead to significantly
worse solution results. Finally, a support is not needed
in all cases, which is however unknown in advance.
Such uncertainties make cost estimation really diffi-
cult and especially the development of correspond-
ing modules. As A
∗
is based on cost estimation, this
forms a disadvantage compared to MRPA.
7 CONCLUSION
In this work, an approach for modular and domain-
guided multi-robot planning for assembly processes
has been presented. Modular concepts are introduced
for separately contributing expert knowledge from
different areas such as domain and automation. Gen-
eral planning difficulties regarding coping with dead-
locks and planning multi-robot tasks are identified
and respective possible algorithmic solving strategies
are proposed. Based on these results, two examples
in the domain of LEGO
R
DUPLO
R
containing the
identified difficulties are introduced: one containing
several situations eventually leading to deadlocks, and
one requiring implicit cooperation of two robots. The
proposed multi-robot planning algorithm (MRPA) is
Modular and Domain-guided Multi-robot Planning for Assembly Processes
603

applied to both, and the results are evaluated statis-
tically and compared to the results of a classical A
∗
implementation. MRPA performs well with the mod-
ular concepts and finds good solutions without run-
ning into huge state-space explosions. However, it is
not yet capable of global optimization, which will be
addressed in ongoing work. Besides, also improved
handling of robot cooperation based on independent
skills is planned to be investigated in future research.
ACKNOWLEDGEMENTS
This work is partly funded by the German Research
Foundation (DFG) under the TeamBotS grant.
REFERENCES
Albu-Sch
¨
affer, A., Ott, C., and Hirzinger, G. (2007). A uni-
fied passivity-based control framework for position,
torque and impedance control of flexible joint robots.
Intl. J. Rob. Research, 26(1):23–39.
Andersen, R. H., Dalgaard, L., Beck, A. B., and Hallam, J.
(2015). An architecture for efficient reuse in flexible
production scenarios. In 2015 IEEE Conf. on Autom.
Science and Engineering, pages 151–157.
Angerer, A., Vistein, M., Hoffmann, A., Reif, W., Krebs, F.,
and Sch
¨
onheits, M. (2015). Towards multi-functional
robot-based automation systems. In 12th Intl. Conf. on
Inform. in Control, Autom. & Robot., pages 438–443.
Fikes, R. and Nilsson, N. J. (1971). STRIPS: A new ap-
proach to the application of theorem proving to prob-
lem solving. Artif. Intell., 2(3/4):189–208.
Finkemeyer, B., Kr
¨
oger, T., and Wahl, F. (2010). The adap-
tive selection matrix - a key component for sensor-
based control of robotic manipulators. In 2010 IEEE
Intl. Conf. on Robotics and Autom., pages 3855–3862.
Giunchiglia, F. (1999). Using abstrips abstractions –
where do we stand? Artificial Intelligence Review,
13(3):201–213.
Gl
¨
uck, R., Hoffmann, A., N
¨
agele, L., Schierl, A., Reif,
W., and Voggenreiter, H. (2018). Towards a tool-
based methodology for developing software for dy-
namic robot teams. In 15th Intl. Conf. on Inform. in
Control, Autom. & Robot., pages 615–622.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. IEEE Trans. on Systems Science and Cybernet-
ics, 4(2):100–107.
Kagermann, H., Wahlster, W., and Helbig, J., editors
(2013). Umsetzungsempfehlungen f
¨
ur das Zukunft-
sprojekt Industrie 4.0. acatech.
Knepper, R. A., Layton, T., Romanishin, J., and Rus, D.
(2013). Ikeabot: An autonomous multi-robot coordi-
nated furniture assembly system. In 2013 IEEE Intl.
Conf. on Robot. & Autom., pages 855–862.
Knoblock, C. A. (1990). Learning abstraction hierarchies
for problem solving. In 8
th
Nat. Conf. on Artificial
Intelligence, pages 923–928. AAAI Press.
Koga, Y. and Latombe, J. . (1994). On multi-arm manipu-
lation planning. In 1994 IEEE Intl. Conf. on Robot. &
Autom., pages 945–952.
Macho, M., N
¨
agele, L., Hoffmann, A., Angerer, A., and
Reif, W. (2016). A flexible architecture for automat-
ically generating robot applications based on expert
knowledge. In 47
th
Intl. Symp. on Robotics.
Malec, J., Nilsson, A., Nilsson, K., and Nowaczyk, S.
(2007). Knowledge-based reconfiguration of automa-
tion systems. In 2007 IEEE Intl. Conf. on Autom. Sci-
ence and Engineering, pages 170–175.
McDermott, D., Ghallab, M., Howe, A., Knoblock, C.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL — the planning domain definition lan-
guage. Technical Report TR 98 003/DCS TR 1165,
Yale Center for Computational Vision and Control.
N
¨
agele, L., Macho, M., Angerer, A., Hoffmann, A., Vistein,
M., Sch
¨
onheits, M., and Reif, W. (2015). A backward-
oriented approach for offline programming of com-
plex manufacturing tasks. In 6
th
Intl. Conf. on Autom.,
Robotics & Applications, pages 124–130. IEEE.
N
¨
agele, L., Schierl, A., Hoffmann, A., and Reif, W. (2018).
Automatic planning of manufacturing processes us-
ing spatial construction plan analysis and extensible
heuristic search. In 15
th
Intl. Conf. on Inform. in Con-
trol, Autom. and Robot., pages 576–583.
Nau, D., Au, T.-C., Ilghami, O., Kuter, U., Murdock, J. W.,
Wu, D., and Yaman, F. (2003). Shop2: An htn plan-
ning system. J. Artif. Int. Res., 20(1):379–404.
Pfrommer, J., Schleipen, M., and Beyerer, J. (2013). PPRS:
production skills and their relation to product, process,
and resource. In 18
th
IEEE Conf. on Emerging Techn.
& Factory Autom. IEEE.
Schoen, T. R. and Rus, D. (2013). Decentralized robotic as-
sembly with physical ordering and timing constraints.
In 2013 IEEE/RSJ Intl. Conf. on Intell. Robots and
Systems, pages 5764–5771.
Stein, D., Schoen, T. R., and Rus, D. (2011). Constraint-
aware coordinated construction of generic structures.
In 2011 IEEE/RSJ Intl. Conf. on Intell. Robots and
Systems, pages 4803–4810.
Thomas, U. and Wahl, F. M. (2001). A system for auto-
matic planning, evaluation and execution of assembly
sequences for industrial robots. In 2001 IEEE/RSJ
IEEE/RSJ Intl. Conf. on Intell. Robots and Systems,
pages 1458–1464.
Wilkins, D. E. (1984). Domain-independent planning repre-
sentation and plan generation. Artificial Intelligence,
22(3):269–301.
Wolfe, J., Marthi, B., and Russell, S. (2010). Combined
task and motion planning for mobile manipulation. In
20
th
Intl. Conf. on Automated Planning and Schedul-
ing, pages 254–257. AAAI Press.
Yan, Z., Jouandeau, N., and Cherif, A. A. (2013). A survey
and analysis of multi-robot coordination. Intl. J. of
Advanced Robotic Systems, 10(12):399.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
604
