
FPGA-based Embedded System Designed for the Deployment in the
Compliant Robotic Leg CARL
Steffen Sch
¨
utz
a
, Atabak Nejadfard
b
, Max Reichardt and Karsten Berns
c
Robotics Research Lab, Department of Computer Science, TU Kaiserslautern, Kaiserslautern, Germany
Keywords:
Embedded Systems, Distributed Control, Compliant Actuation, Series Elastic Actuator, Bipedal Walking.
Abstract:
The embedded system that is distributed within a bipedal robot is a key component of such a highly inter-
woven mechatronic system. Generally, it has to handle two competing main tasks – executing the embedded
closed-loop control of the actuators and handling the communication with the higher-level control system. As
the restrictions on physical size and energy consumption limit its computational resources, the design of the
embedded nodes poses a potential bottleneck for the performance of the overall system. Hence, the following
presents an approach to mitigate the conflicting requirements by deploying FPGA-based embedded nodes. It
is illustrated how the additional flexibility at the logic level is used to implement the closed-loop force and
impedance control of a series elastic actuator. Furthermore, it is shown how the consequent hardware/software
co-design enables the deployment of a full featured robotic framework. To validate the concept, the properties
of the implementation are characterized.
1 INTRODUCTION
In an advanced bipedal robot, the distributed embed-
ded controllers should abstract the mechatronic sys-
tem for the higher-level control system – e.g., to act
like an ideal torque or position source (Radford et al.,
2015). This abstraction entails two main tasks at
the embedded level – the application specific tasks
such as executing the closed-loop control of the ac-
tuators and the handling of the communication with
the higher-level control. Depending on how much of
the closed-loop structure is distributed to the embed-
ded nodes determines how the criticality is distributed
between the communication and the application task.
If most of the closed-loop control cascades are exe-
cuted at the embedded nodes, the communication side
becomes less performance critical. In this scenario, a
high sampling rate and the deterministic execution of
the embedded control are the main determinant for the
achievable performance (Whitney, 1977; Shirai et al.,
2016). On the other hand, if a portion of the closed-
loop actuator structure is executed at the high-level
controller, the frequency and latency of the commu-
nication might limit the actuator performance (Zhao
a
https://orcid.org/0000-0001-7568-6439
b
https://orcid.org/0000-0001-9074-7519
c
https://orcid.org/0000-0002-9080-1404
et al., 2015). Thus, a deterministic execution with a
high frequency of the two main tasks is advantageous
for the performance of the overall biped.
Looking at the literature on the embedded solu-
tions deployed in current walking robots, it can be
noted that the degree of the distribution varies among
the systems. Table 1 summarizes the implementation
details as well as the main performance indicators
in form of various execution frequencies of several
legged machines. In all systems, with the exception
of the BioBiped, a dedicated controller handles the
current control of the electromagnetic motors. Thus,
the current control and – in case of BLDC motors the
commutation – is not mentioned explicitly in Table 1.
The embedded systems developed for Star-
lETH (Hutter, 2013) and BioBiped (Scholz, 2016) are
representatives of a centralized approach. As men-
tioned above, in case of the BioBiped, even the cur-
rent control is handled by the central high-level con-
troller. In StarlETH, the current and velocity con-
trol of the motors, are handled by the embedded con-
troller. Notably, the purpose of the latter is the lo-
cal and thereby high-frequent compensation of the
undesired motor and gearbox dynamics. Neverthe-
less, in both cases the actuator behavior desired by
the higher control layers are established by the high-
level controller. All other implementations that are
listed, namely DLR’s TORO, NASA’s Valkyrie, IIT’s
Schütz, S., Nejadfard, A., Reichardt, M. and Berns, K.
FPGA-based Embedded System Designed for the Deployment in the Compliant Robotic Leg CARL.
DOI: 10.5220/0007978205370543
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 537-543
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
537

Table 1: Overview of the control infrastructure deployed in existing walking machines presented in the literature.
Platform C/D EC f
EC
Bus f
Bus
HLC f
HLC
BioBiped (Scholz, 2016) C - - EtherCAT 1kHz Orocos/ROS 1 kHz
StarlETH (Hutter, 2013) C V 1 kHz CAN 400 Hz SL 400 Hz
TORO (Ott et al., 2010) D P/I/T 3 kHz Sercos-II 1 kHz Matlab 1 kHz
Valkyrie (Radford et al., 2015) D I/T 5 kHz Robonet - ROS < 3 kHz
WALK-MAN (Tsagarakis et al., 2017) D P/T 1 kHz EtherCAT 500Hz YARP 500Hz
ESCHER (Knabe et al., 2015) D I/T 2 kHz CAN 500 Hz Bitfrost/ROS 500 Hz
C – Centralized, D – Decentralized, EC – Embedded Control, HLC – High-Level Control
P – Position Control, V – Velocity Control, I – Impedance Control, T – Torque Control
WALK-MAN, and Virgnia Tech’s THOR/Escher –
implement at least the torque/force plus one further
control cascade at the embedded node.
Generally, it can be observed that the sampling
rate of closed-loop cascades that establish the final ab-
straction towards the higher control layers is limited
in centralized control approaches – mostly due to the
bandwidth of the communication bus (Hutter, 2013).
Furthermore, as mentioned above, the latency intro-
duced by the communication bus reduces the stabil-
ity margin of the control system. Nevertheless, even
in highly distributed control approaches, a high band-
width communication with the superimposed control
layers is desirable.
In addition to the pure performance related char-
acteristics of an embedded system, another aspect is
the ease of handling of such a complex mechatronic
system as a bipedal robot. Usually, there is a break in
the development process between the powerful PCs
that execute the high-level control and the distributed
embedded nodes that implement the actuator control.
As Table 1 shows the high-level control is usually im-
plemented using a framework that runs on top of a
full-featured OS. The embedded nodes in contrast are
mostly used bare-metal or at most with a slim real-
time OS. Nevertheless, a more unified approach to
software development and especially system debug-
ging is desirable and facilitates the system handling
tremendously.
Therefore, in prior work, we presented an ap-
proach for the decoupling of the two competing tasks
by using an FPGA-based embedded node that enabled
the deployment of the full-featured robotic framework
Finroc
1
to the bare-metal embedded nodes (Sch
¨
utz
et al., 2014; Reichardt et al., 2017). Following a
strict HW/SW co-design approach, the flexibility pro-
vided by FPGAs ensured this did not negatively im-
pact the performance characteristics of the embedded
nodes. The deployment of either task-specific pro-
cessing units or general-purpose soft-processors al-
1
https://www.finroc.org/
lows for parallel computation to mitigate computa-
tional bottlenecks.
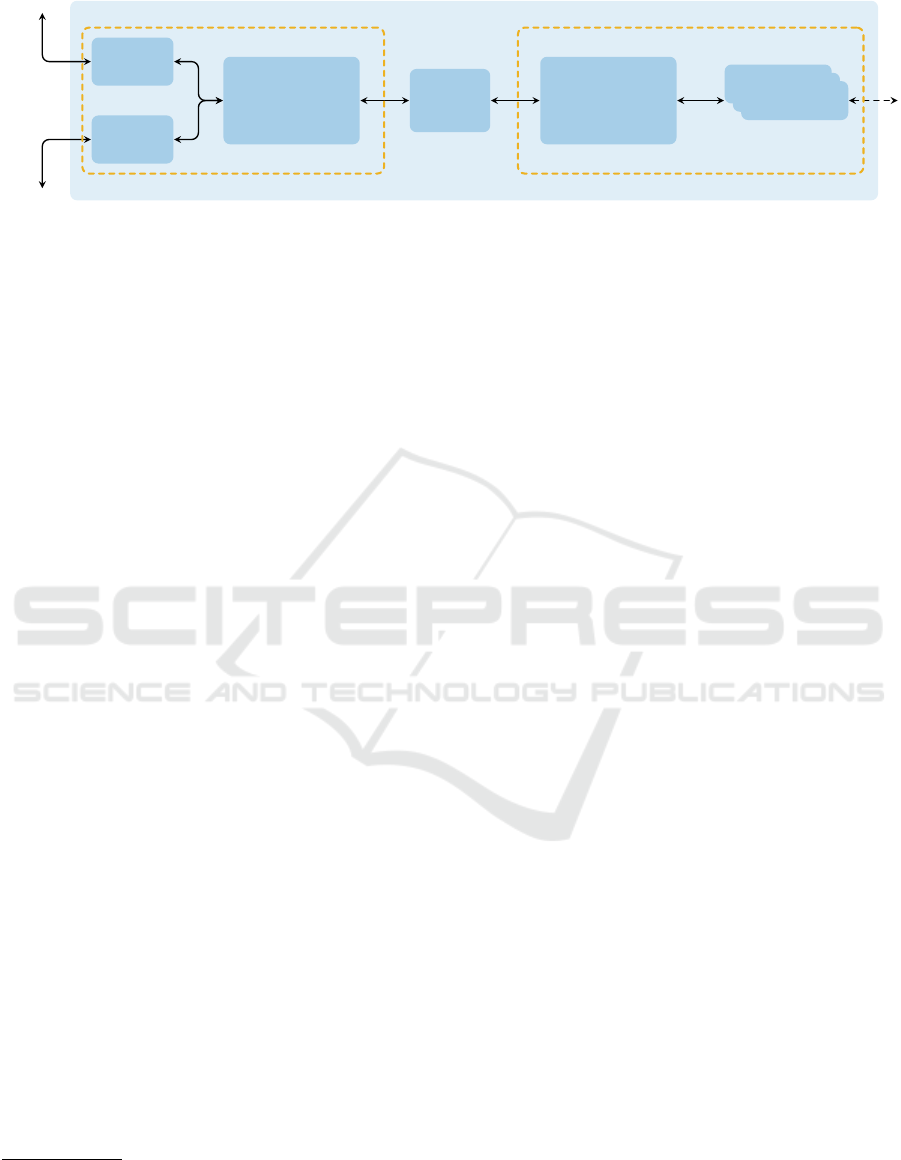
The concept for the FPGA system is illustrated
in Figure 1. At the center of each subsystem –
the communication side and the application side –
is a soft processor. The communication between
the two subsystems is handled via a block of Dual-
Port Ram. More details about the Ethernet-based
framework-integrated embedded protocol (FinEmbP)
and the data handling within the FPGA system are
provided in (Sch
¨
utz et al., 2014).
This system served as the basis for the devel-
opment of the embedded nodes that are deployed
within the compliant robotic leg Compliant Robotic
Leg (CARL) developed at the Robotics Research Lab
(RRLab) (Sch
¨
utz et al., 2017). It poses a first it-
eration, to bring the biologically-inspired behavior-
based bipedal locomotion control (B4LC)– also de-
veloped at the RRLab – from a simulation to a phys-
ical robotic system. Thus, CARL is a bio-inspired
system that – inspired by the morphology of humans
– integrates mono- as well as biarticular actuations.
The redundant drive system – five series elastic ac-
tuators (SEAs) that act on three joints – is imple-
mented using two scaled RRLab SEAs developed at
the RRLab (Sch
¨
utz et al., 2016).
Hence, the following is meant to give an insight
into the conceptual design and implementation of the
embedded nodes at the electronic as well as the FPGA
level. The purpose is to encapsulate the RRLab SEAs
towards B4LC as force and impedance sources while
exploiting the full actuator potential. Especially the
extensions to the HW/SW system at the application
side of the FPGA and the distribution of the closed-
loop tasks within that system are detailed.
2 ELECTRONIC SYSTEM
As a first design iteration, at the electronics level, a
modular approach has been adopted. Therefore, as
illustrated in Figure 2a, the functionalities are dis-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
538
FPGA
Communication
Processor
Dual-Port
RAM
Application
Processor
IP Cores
MAC
MAC
Ethernet
Figure 1: Task decomposition within the FPGA system. Adapted from (Sch
¨
utz et al., 2014).
tributed across several modules in form of separate
PCBs. One module contains the FPGA and the nec-
essary periphery. At the core of that module is the
eSM Board from elrest Automationssysteme GmbH
2
(for more information refer to (Sch
¨
utz et al., 2014)).
The second module contains the output stage that is
used for the commutation and the current control of
the BLDC motor. Currently, this is handled by the
Gold Twitter servo drive from Elmo Motion Control
3
.
Furthermore, that module contains an ADC to capture
the winding temperature via the PT1000 temperature
sensor. A third module implements the I/O interface
to the embedded sensory system. For electric stability
and robustness, all signals are differential driven us-
ing RS-485 transceiver. The connection between the
modules is established using a backplane. Figures 2b
and 2c shows the modular backplane system.
In a second iteration, once the exact requirements
are known and the functionality of the electronics is
ensured, the modular system can be integrated into
a compact dedicated embedded node. Especially the
commutation and the current control of the BLDC
motor can also be handled by the FPGA making the
Gold Twitter obsolete.
3 APPLICATION-SIDE HW/SW
IMPLEMENTATION
Figure 3 shows a detailed illustration of the FPGA
system that implements the application side. At the
heart of it is the application soft processor – in this
implementation a Intel Nios II
4
. It is extended by a
multitude of IP Cores that are accessible by the Nios
processor as memory-mapped slaves. They handle
the serial interfaces to the embedded iC-MU-based
sensors. One IP Core directly interfaces the sensor
that captures the spring deflection which serves as the
2
http://http://www.elrest-gmbh.com/
3
http://www.elmomc.com/
4
https://www.intel.com/content/www/us/en/products/
programmable/processor/nios-ii.html
feedback for the force control of the SEA. Through
the dedicated IP Core, the sensory information can be
obtained at the maximum sampling rate and subse-
quently filtered without causing any overhead at the
Nios. The filtered spring position can be obtained by
a single memory access.
The sensor that captures the position of the rotor is
interfaced by the Elmo Gold Twitter as it requires the
information for the commutation of the electromag-
netic field. Hence an IP Core within the FPGA taps
the SSI in which the Gold Twitter acts as the master.
Based on the obtained information another IP Core
calculates the absolute length of the ball screw. With
the rotational iC-MU being a single turn encoder, this
core detects the sensor overflows and hence – once
initialized – can calculate the absolute length of the
ball screw. After being filtered in HW, the ball screw
length can be summed with the spring deflection to
obtain the actuator length that forms the feedback for
the impedance control.
The interface to the Elmo Twitter is implemented
by two PWM signals and a single I/O. Due to the
flexibility of the FPGA, the properties of the PWM
signals could be exactly determined to fully exploit
the interface provided by the servo drive. Hence, the
PWM signal that encodes the desired current is modu-
lated with a base frequency of 160 MHz as this resem-
bles exactly the frequency at which the servo drive
logs the signal. The second PWM signal is the cur-
rent feedback. For safety reasons and in case of sys-
tem failure, a watchdog that monitors the Application
Nios can disable the servo drive via the I/O that trig-
gers its safe torque off (STO).
Another dedicated IP Core interfaces the serial in-
terface of the ADC that monitors the winding tem-
perature of the BLDC. This information is used in a
model of the actuators thermal dynamics that is im-
plemented in SW on the Application Nios. Further-
more, three of the five embedded nodes additionally
interface the sensors that are located at the joints.
Similar to the spring deflection, the sensor is sampled
at maximum frequency and subsequently filtered by
dedicated IP Core.
FPGA-based Embedded System Designed for the Deployment in the Compliant Robotic Leg CARL
539

FPGA
Board
elrest eSM
ETH1 ETH2
Interface
Board
RS485 Transceiver
Output
Stage
Elmo
Gold Twitter
ADC
Backplane
(a)
(b) (c)
Figure 2: Embedded electronics developed for CARL– (a) the underlying modular concept and the implementation of (b) the
FPGA module and (c) the Elmo based output stage. All the three boards are mounted on the backplane board.
4 IMPLEMENTATION RESULTS
Figure 4 depicts the distribution of the closed-loop
cascades, the relevant data flow, and the respective
sampling frequencies within the HW/SW system. The
current control and the commutation of the BLDC
motor are handled by Elmo Gold Twitter at a fre-
quency of 20 kHz. As mentioned above, this fre-
quency also dictates the sampling frequency of the
IP Cores that tap the rotor sensor, calculates the ball
screw length, and filter the respective data. The spring
deflection is sampled and filtered at 40 kHz.
Similar to Hutter (Hutter, 2013), the force control
is established by a PID control. As already indicated
in Figure 3, the PD-portion of the force control is im-
plemented as a dedicated IP Core. It is executed at
a frequency of 10 kHz and, as it is implemented in
logic, without any jitter. The integral part of the force
control is implemented in software. The combination
of a low I-gain and an anti-windup mechanism is used
to eliminate the steady-state force error. The force
control is complemented by a feed-forward term that
is based on the motor torque constant.
The outer impedance cascade is also implemented
in software. It relies both on the spring deflection
and the ball screw length as feedback signals to de-
termine the current actuator length. All application-
side software is implemented within the deployed
Finroc instance and are executed with a frequency of
5 kHz. Notably, the application-side software imple-
ments more functionality beyond the closed-loop con-
trol. It includes the thermal model of the BLDC mo-
tor, several safety mechanisms, and the conversion of
the raw sensor values to the SI values that are passed
to the higher control layers.
Comparing the achieved sampling rates to the
numbers summarized in Table 1, it becomes obvious
that the presented system outperforms the comparable
systems by at least a factor of two.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
540

FPGA
Elmo
Twitter
A/B/C
PD Control
Current
Feedback
Application
Nios
Filter
SSI Master
iC-MU Spring
SSI Master
iC-MU Joint
Filter
SSI Listener
iC-MU Rotor
Length
Calculation
Filter
Watchdog
ADC
SPI Master
ADC Pt1000
PWM
PWM
SSI
SSI
STO
SSI
SPI
Figure 3: IP Cores acting as coprocessors on the application side of the FPGA system.
FPGA
Nios
5 kHz
Elmo
I
PD
10 kHz
+
Current
Control
20 kHz
+
Impedance
Control
Filter
SSI Master
iC-MU Spring
40 kHz
Filter
Length
Calculation
SSI Listener
iC-MU Rotor
20 kHz
Force Control
Z
d
F
d
Figure 4: Distribution of the closed-loop cascades within the HW/SW system with the respective sampling frequencies.
4.1 Bare-metal Finroc Execution
Timing
Besides the raw sampling rates, the performance of
the application-side software has been analyzed re-
garding the execution timing and jitter (Reichardt
et al., 2017). A dedicated IP Core has been used for
the measurement of the exact timing in clock cycles
of the application soft processor. Within the Finroc
execution cycle, the maximum jitter was around 569.4
cycles. This equals a variation of the execution timing
by 2.29 % relative the overall cycle length. Thus, the
value is well below the desirable 10 % that are deter-
mined by Shirai et al. as performance critical (Shirai
et al., 2016).
Overall, the numbers validate that no performance
limitations regarding the closed-loop control of the
actuator originate from the deployment of the robotic
framework to the embedded nodes. On the other side
it entails the benefit that the nodes are seamlessly in-
tegrate into the tooling of the high-level control sys-
tem without a need to develop any additional tools.
Especially, it facilitates the task tremendously when
putting a complex system into operation.
FPGA-based Embedded System Designed for the Deployment in the Compliant Robotic Leg CARL
541
4.2 FinEmbP Timing
Although the presented system poses a highly dis-
tributed implementation of the actuator control that
reduces the requirements on the communication bus,
the timing of FinEmbP implementation is investigated
in a second experiment. The characteristics are eval-
uated using the FinEmbP network that is used for the
first walking experiments with CARL. It consists of
seven FinEmbP nodes – four standard SEA nodes as
described above; one SEA node that additionally in-
terfaces the sensory system in the foot to capture the
interaction with the ground; a node that controls the
test-rig (TR) that consists of a treadmill and a winch
mechanism to mimic the second leg; one AD node
that monitors the supply voltage and current of the
overall system.
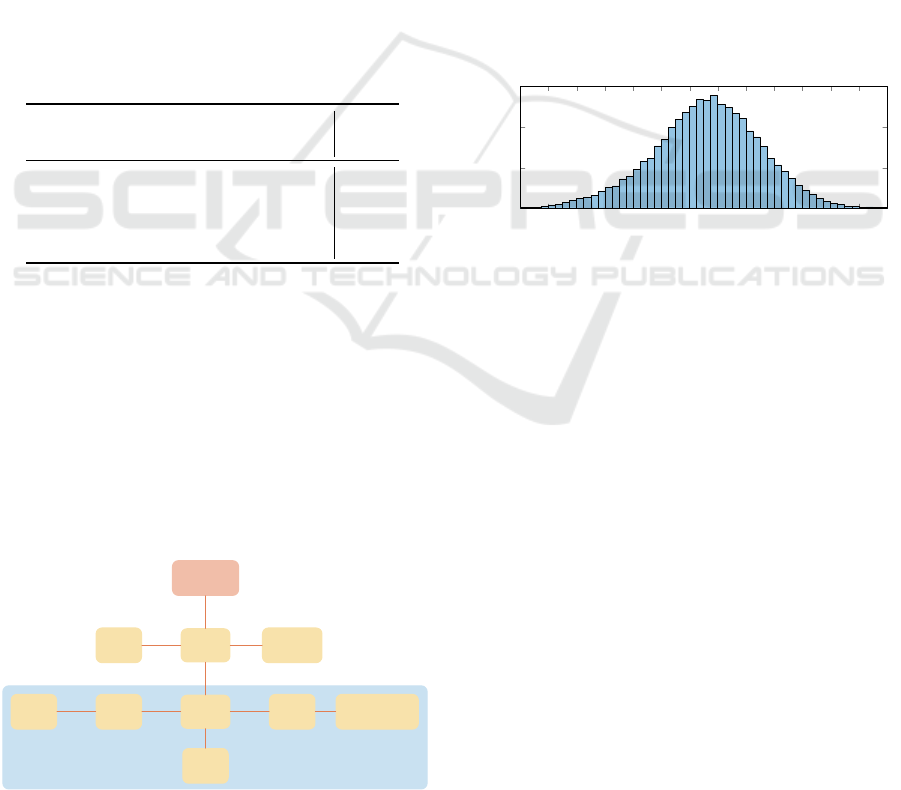
Table 2 gives the data that is transmitted and re-
ceived by the nodes. The table shows that the trans-
Table 2: Data sent and received by the FinEmbP nodes in
Byte [B].
SEA TR AD Total
Std Foot
Output 108 140 96 136 804
Input 56 56 4 60 344
Internal 332 368 108 328 -
Blobs 7 8 3 7
-
mitted data is relatively low – one of the benefits of
the actuator abstraction towards the higher control
layers. Besides the explicit input/output data, node
internal data is divided into blobs with a maximum
size of 48 B that are attached to the cyclic output data
frames (referred to as iSend in the FinEmbP context,
refer to (Sch
¨
utz et al., 2014)). Hence, this mechanism
poses a trade-off between the update rate of the inter-
nal data and the input/output data.
The seven nodes are arranged in a mixed star/line
topology as shown in Figure 5. It includes two
FinEmbP
Master
Switch
AD
Node
Test-Rig
Node
CARL
Switch
SEA
Node
SEA
Node
SEA
Node
SEA + Foot
Node
SEA
Node
Figure 5: Topology of the FinEmbP network used during
the experiment.
switches – one that is located within CARL and the
second between CARL and the PC that executes the
FinEmbP master.
For the experiments, the FinEmbP master is run-
ning on a standard PC (Intel Core i7-4790K at 4 GHz
and 16 GB RAM) with a headless Ubuntu 14.04. The
high-level walking control developed for CARL– a
subset of B4LC– is executed on top of the FinEmbP
master. Hence, the overall setup resembles the normal
operating conditions. Notably, the FinEmbP protocol
is running at maximum frequency. The idle phase that
is part of the protocol is set to zero.
To obtain a representative impression of the prop-
erties, 50000 FinEmbP cycles have been recorded.
The average cycle time is 736 µs (approximately
1.36 kHz) with a standard deviation of 53 µs (7 % of
the average cycle time). The jitter is mostly due to
the implementation at the master side. As aforemen-
tioned, it is executed on a standard OS using a POSIX
UDP socket. Figure 6 shows the histogram of the
50000 cycles.
600 620 640 660 680 700 720 740 760 780 800 820 840 860
0
1,000
2,000
3,000
FinEmbP Cycle Time [µs]
Cycles
Figure 6: Histogram of the FinEmbP timing. The data is
recorded with a network of seven nodes and the high-level
walking control of CARL running on the master PC.
The average bus frequency compares well to the
comparable systems listed in Table 1. As the actuator
control is completely executed at the embedded node,
the observed jitter is not critical.
5 CONCLUSIONS AND FUTURE
WORK
The paper at hand presents application specific archi-
tecture of the dedicated embedded system designed
for the use in CARL, a compliant bio-inspired robotic
leg. Following a strict HW/SW-codesign approach,
the deployment of a full-featured robotic framework
to the bare-metal soft processor running at 100 MHz
is achieved. This is formulated as an explicit design
goal for the development of Robot Operating Soft-
ware (ROS) 2.0 (Gerkey, 2017).
Besides the soft benefits that come with the ex-
tension of the robotic framework to the embedded
nodes, the performance critical properties are pre-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
542

served. This is achieved by implementing the sen-
sor sampling and filtering as well as parts of the force
closed-loop control as dedicated IP Core. Especially,
the latter removes any significant jitter from the con-
trol execution.
It has been validated experimentally that the exe-
cution characteristics of the software components im-
plemented within the robotic framework are adequate.
Overall, the achieved sampling frequencies and deter-
minism match or even exceed the properties of com-
parable systems. Similarly, the achieved frequency of
the FinEmbP communication bus with 1.36 kHz com-
pares well to other walking machines.
A potential next step would be the implementa-
tion of the commutation and the current control of
the BLDC within the FPGA fabric as a dedicated
co-processor. Thereby, the Elmo Gold Twitter servo
drive can be substituted by a bare output-stage that
features three half bridges and the appropriate facili-
ties for the current measurement. Subsequently, the
modular electronics can be composed to a highly-
integrated physically small single PCB. It could be
beneficial to integrate the electronics into the actua-
tor.
If the jitter of the communication bus proofs to be
critical, firstly a real-time operating system (OS) at
the master side poses a potential improvement. Fur-
thermore, the OS’s stack could be partially bypassed
using, e.g., by using libpcap.
ACKNOWLEDGEMENTS
This work was partly funded by the European Com-
mission 7th Framework Program under the project
H2R (no.60069).
REFERENCES
Gerkey, B. (2017). Why ROS 2.0? http://design.ros2.org/
articles/why ros2.html. Accessed: 2019-04-16.
Hutter, M. (2013). StarlETH & co-design and control of
legged robots with compliant actuation. PhD thesis,
Diss., Eidgen"ossische Technische Hochschule
ETH Z"urich, Nr. 21073, 2013.
Knabe, C., Griffin, R., Burton, J., Cantor-Cooke, G., Danta-
narayana, L., Day, G., Ebeling-Koning, O., Hahn, E.,
Hopkins, M., Neal, J., and others (2015). Designing
for Compliance: ESCHER, Team VALOR’s Compli-
ant Biped. Technical report, Terrestrial Robotics En-
gineering & Controls (TREC) Lab, Virginia Tech.
Ott, C., Baumg
¨
artner, C., Mayr, J., Fuchs, M., Burge, R.,
Lee, D., Eiberger, O., Albu-Sch
¨
affer, A., Grebenstein,
M., and Hirzinger, G. (2010). Development of a biped
robot with torque controlled joints. In Humanoid
Robots (Humanoids), 2010 10th IEEE-RAS Interna-
tional Conference on, pages 167–173. IEEE.
Radford, N. A., Strawser, P., Hambuchen, K., Mehling,
J. S., Verdeyen, W. K., Donnan, A. S., Holley, J.,
Sanchez, J., Nguyen, V., Bridgwater, L., et al. (2015).
Valkyrie: Nasa’s first bipedal humanoid robot. Jour-
nal of Field Robotics, 32(3):397–419.
Reichardt, M., Sch
¨
utz, S., and Berns, K. (2017). One
fits more - on highly modular quality-driven design
of robotic frameworks and middleware. Journal
of Software Engineering for Robotics (JOSER):
Special Issue on Robotic Computing, 8(1):141–
153. ISSN: 2035-3928; this publication is available at
http://joser.unibg.it/index.php?journal=joser&page=is
sue&op=view&path[]=9.
Scholz, D. (2016). On the Design and Development of Mus-
culoskeletal Bipedal Robots. PhD thesis, Technische
Universit
¨
at Darmstadt.
Sch
¨
utz, S., Mianowski, K., K
¨
otting, C., Nejadfard, A., Re-
ichardt, M., and Berns, K. (2016). RRLAB SEA – A
highly integrated compliant actuator with minimised
reflected inertia. In IEEE International Conference
on Advanced Intelligent Mechatronics (AIM).
Sch
¨
utz, S., Nejadfard, A., Mianowski, K., Vonwirth, P., and
Berns, K. (2017). CARL – A compliant robotic leg
featuring mono- and biarticular actuation. In IEEE-
RAS International Conference on Humanoid Robots,
pages 289–296.
Sch
¨
utz, S., Reichardt, M., Arndt, M., and Berns, K. (2014).
Seamless extension of a robot control framework to
bare metal embedded nodes. In Informatik 2014, Lec-
ture Notes in Informatics (LNI), pages 1307–1318,
Stuttgart, Germany.
Shirai, T., Osawa, K., Chishiro, H., Yamasaki, N., and
Inaba, M. (2016). Design and Implementation of
a High Power Robot Distributed Control System on
Dependable Responsive Multithreaded Processor (D-
RMTP). In IEEE 4th International Conference on
Cyber-Physical Systems, Networks, and Applications
(CPSNA), pages 19–24.
Tsagarakis, N. G., Caldwell, D. G., Negrello, F., Choi,
W., Baccelliere, L., Loc, V., Noorden, J., Muratore,
L., Margan, A., Cardellino, A., Natale, L., Hoffman,
E. M., Dallali, H., Kashiri, N., Malzahn, J., Lee, J.,
Kryczka, P., Kanoulas, D., Garabini, M., Catalano,
M., Ferrati, M., Varricchio, V., Pallottino, L., Pavan,
C., Bicchi, A., Settimi, A., Rocchi, A., and Ajoudani,
A. (2017). Walk-man: A high-performance humanoid
platform for realistic environments. Journal of Field
Robotics, 34(7):1225–1259.
Whitney, D. (1977). Force feedback control of manipulator
fine motions. Trans. ASME J. of Dynam. Syst., Mea-
sur. and Control, 99(2):91–97.
Zhao, Y., Paine, N., Kim, K. S., and Sentis, L. (2015). Sta-
bility and Performance Limits of Latency-Prone Dis-
tributed Feedback Controllers. IEEE Transactions on
Industrial Electronics, 62(11):7151–7162.
FPGA-based Embedded System Designed for the Deployment in the Compliant Robotic Leg CARL
543
