
An Hybrid Algorithm to Simulate Mice Following Residential Walls
Moussa Sall
1
, Jean-Marie Dembele
1
and Jean Le Fur
2
1
Dépt. Informatique, Univ. G. Berger/Saint-Louis, Senegal and Lab. IRD-BIOPASS, Campus Bel-Air, Dakar, Senegal
2
Institut de Recherche pour le Développement (IRD), Centre de Biologie pour la Gestion des Populations (CBGP),
Campus Baillarguet, CS 30016, F-34988 Montferrier-sur-Lez, France
Keywords: Agent-based Modelling, Commensal Rodent, Wall following, Hybrid Architecture.
Abstract: Commensal rodents such as mice that live in the proximity of human are well-known pests that can transmit
diseases to man. An agent-based model is presented to formalize the spread of rodents in human habitations.
We focus in this paper on the specific behaviour of mice consisting in walking along the walls (thigmotaxis).
In order to simulate this behaviour we combine a cognitive architecture with an algorithm simulating ro-
dents’ moves following residential walls. The cognitive model and the ‘wall following’ algorithm developed
are successively described. Simulation configurations are tested to evaluate the robustness of the ‘wall fol-
lowing’ algorithm alone. In a data poor context this simple combined algorithm, using a discrete space, ful-
fils the basic needs to simulate a plausible mouse activity, towards a detailed representation of mice moves
within a fluctuating environment.
1 INTRODUCTION
Commensal rodents that live in proximity to humans
are most often reservoirs of bacteria and viruses that
can be transmitted and cause epidemics. In epidemi-
ology, new approaches known as Eco-Health
(Lisitza and Wolbring, 2018) or One-Health (Men-
cke, 2013) suggest considering the whole set of
factors likely to facilitate the transmission of diseas-
es to humans. Among these factors, the risk of hu-
man-to-rodent contact is a key to the possible trig-
gering or not of a zoonotic epidemic. However, data
are not or are scarcely available about the details of
rodent fine behaviour in human habitats. In this
context, simulation tools may help providing a first
image of what could really be ongoing in the field.
Commensal rodents like domestic mice live in hu-
man-inhabited areas where access to shelter and
food is ensured. This preference however leads them
to live in very dynamic and at the same time danger-
ous environments. Commensal rodents have thus
developed survival behaviours such as staying close
to their nest, move in covered areas, avoid empty
spaces, increase their activity during calm hours and,
particularly, walk along the walls.
This way of moving along vertical surfaces and
avoid open habitats keep them in a relatively com-
fortable area with lower predation risk (Jensen,
2003). For this purpose they use their whiskers as
tactile sensors which enable them to stay permanent-
ly in contact with walls (Meyer et al, 2005), an abil-
ity known as thigmotaxis (Reid, 2005).
This study is a first step to simulate mice move-
ments in a complex residential environment. It aims
to account in a simple way for this foraging or wan-
dering particular behaviour by combining in simu-
lated agents a reactive “wall following" algorithm
with a cognitive search behaviour. The latter is used
to make mice agents interact with items of interest
such as food, relatives, predators, shelter, etc.
This article is first devoted to the presentation of
existing methods that could be used to implement a
“wall following” behaviour in a simulation context
as well as the perspectives offered by using hybrid
modelling. We then describe the general model of
cognitive behaviour along with the reactive “wall
following” algorithm plugged in this model. The
robustness of the algorithm is then tested using dif-
ferent space configurations. The results obtained and
the validity of the model are finally discussed in the
light of existing knowledge.
2 RELATED WORKS
2.1 Wall Following Algorithms
Exploring an unknown environment, avoiding ob-
368
Sall, M., Dembele, J. and Fur, J.
An Hybrid Algorithm to Simulate Mice Following Residential Walls.
DOI: 10.5220/0007978303680375
In Proceedings of the 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2019), pages 368-375
ISBN: 978-989-758-381-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

stacles met in a path or reaching targeted point ob-
jectives are common problems in simulation model-
ling of agents living in an unknown environment.
According to Mishra and Bande (2008), wall follow-
ing algorithm is one of several navigating algorithm
that simplifies the issue of autonomous movement of
agents in their environment. In this field Lin et al.
(2018) proposed a behaviour-based fuzzy controller
(BFC) to implement mobile robot wall-following
control. To detect the corners and edges Nepali et al
(2014) proposed a wall-following algorithm using
laser range finder. Purbarani et al. (2015) also pro-
posed a wall following algorithm on fire-fighting
robot using V-Rep ultrasonic sensors. To achieve an
adaptive controller for wall following mode, (Lin et
al., 2017) proposed an efficient recurrent fuzzy cer-
ebellar model articulation controller based on dy-
namic group artificial bee colony. Agiriga (2011)
also proposed a simple and efficient model to avoid
wall obstacles using Finite State Machine logic
(Gill, 1962). In the bio-inspired robotics domain,
thagmotaxis has been also explored in depth during
the building of the psikharpat robot (Meyer et al.,
2005). This model provides a sophisticated behav-
iour using for example strategies meta-controllers of
several navigation routes (Caluwaerts et al., 2012)
established by the robot. The latter shows the im-
portance of using various strategies for a rat robot
operating in a complex environment.
2.2 Hybrid Architectures
Agent-based model architectures are commonly
based on either a (i) reactive, a (ii) cognitive ap-
proach (Ferber 1999) or (iii) a combination of both
to formalize agents’ actions.
In the first one, agents react in response to inter-
nal or external influence following simple “Stimulus
- Response” schemes. Reactive architectures possess
several advantages such as simplicity, computational
tractability, robustness against failure (Komma,
2011). However, in this type of architecture agents
cannot learn from their experience to improve their
performance over time nor select the appropriate
reaction when stimuli are diverse. Cognitive archi-
tectures however allow agents to elaborate adapted
decision based on their relationships with a compo-
site environment (Ye, 2018). These architectures
permit to describe world objects, their state and
properties, elements of know-how, or meta-
knowledge (Müller, 2002). On the other side, the
cognitive approach aims to break down complex
problems into sub-problems, in order to reduce their
complexity, to treat them separately and combine
their results. However like the reactive architecture,
it presents some disadvantages such as complexity
and heaviness of algorithms needed to face the un-
foreseen of real world but also the simplicity of
some problems.
To tackle with these issues several works used
hybrid architecture for implementing their models.
Faghihi (2011) propose a Conscious Emotional
Learning Tutoring System (CELTS) for introduction
of transfer learning and memory with analogical
information. The Simulation of the Mental Appa-
ratus and Applications (SiMA) in (Schaat et al,
2015), tends to create plausible and reasonable mo-
tivation in human decision and behaviour. Connec-
tionist Learning with Adaptive Rule Induction
Online (CLARION) in (Sun et al., 1999) is a popular
hybrid architecture that aims to incorporate most
cognitive aspects that distinguishes abstract and
concrete knowledge, where concrete knowledge is
easier to obtain and gets more attention than the
abstract one.
To formalize a realistic overall behaviour of
mice wandering in habitations we therefore investi-
gated and developed an agent-based hybrid architec-
ture mixing reactive and cognitive behaviours and
focusing on the ability of these commensal rodents
to simultaneously (i) follow wall and (ii) interact
with things of interest perceived around them (part-
ner, food, children, shelter, etc.).
3 MODEL DESCRIPTION
The ‘wall following’ algorithm is integrated within a
general model described in Le Fur et al. (2017) and
coded in Java using the Repast Simphony Platform
(North et al, 2005).
Within this section we first present concepts and
modelling considerations required to formalize the
world of commensal rodent foraging using cognitive
interaction with relatives and their passive environ-
ment. We then describe the rodent agents reacting to
wall obstacles using the wall following algorithm.
3.1 General Cognitive Model
In this section we follow a simplified version of the
Overview, Design concept and Details (ODD) pro-
tocol proposed by Grimm et al (2006) for describing
agent-based models. According to this scheme, an
overview is first presented, explaining the purpose
of the model, the state variables and scales and final-
ly its process scheduling; the design concepts are
then described.
An Hybrid Algorithm to Simulate Mice Following Residential Walls
369
3.1.1 Purpose
This simulation model aims to explore commensal
rodent spread within an urban habitat. It particularly
focuses on the behaviour ability of rodents to forage
and explore habitations using cognitive search be-
haviour to interact with items of interest whether
attractive (e.g., food, nests, relatives) or repulsive
(e.g., cats, humans) in their surroundings.
3.1.2 State Variables and Scales
Two categories of object classes are defined in the
model: one formalizing the simulated world topolo-
gy and one describing the commensal rodent. A
supplementary class describing the biological char-
acteristics of the species is also implemented.
Habitat Units: city or village habitat is formalized
using two types of space, connected by conversion
factors. The first is a continuous Euclidian two-
dimensional space coded in meter units. It is used to
locate agents, express perception of their surround-
ings and precisely compute their moves. In the sec-
ond type of space, the simulated domain is discre-
tized using a matrix of square soil cells (raster
space). Each cell is characterized by a value describ-
ing its nature and the degree of affinity of a rodent
for this type of cell (wall, room, shop, enclosure,
etc.). Cells can support several rodents and things
(e.g., humans, cats, vehicles, nests, etc.).
In the model’s implementation presented, the
simulated domain is discretized into a matrix of soil
cells of 1m×1m sizes that is compatible with the
rodents perception and action scale.
The temporal scale is configurable in seconds,
minutes or hours even during the simulation (Le Fur
and Sall, 2018).
Rodent Agents: Each rodent agent of the model is
characterized with a unique ID, sex, birth date; its
location in the grid, perception radius of surround-
ings without obstacle, mean daily speed, mortality
risk, age at sexual maturity (different for males and
females), mating period, litter size, gestation length,
anoestrus duration and genetic profile (value of the
allele at each gene locus). It also has characteristics
that vary over time, such as age, physiological status
(maturity, pregnancy, and readiness to mate) and
geographic location. Rodent agents are mobile; they
can move in the landscape and therefore have to
account for a changing surrounding.
3.1.3 Process Overview and Scheduling
Commensal rodent agents are created either at ini-
tialization or when a pregnant female spawns. They
are placed in the model’ context and thus connected
with other objects and agents.
Time is formalized as discrete steps. Rodent
agents are triggered asynchronously at each time
step in an order defined by their internal ID numbers
following the scheme described on Figure 1.
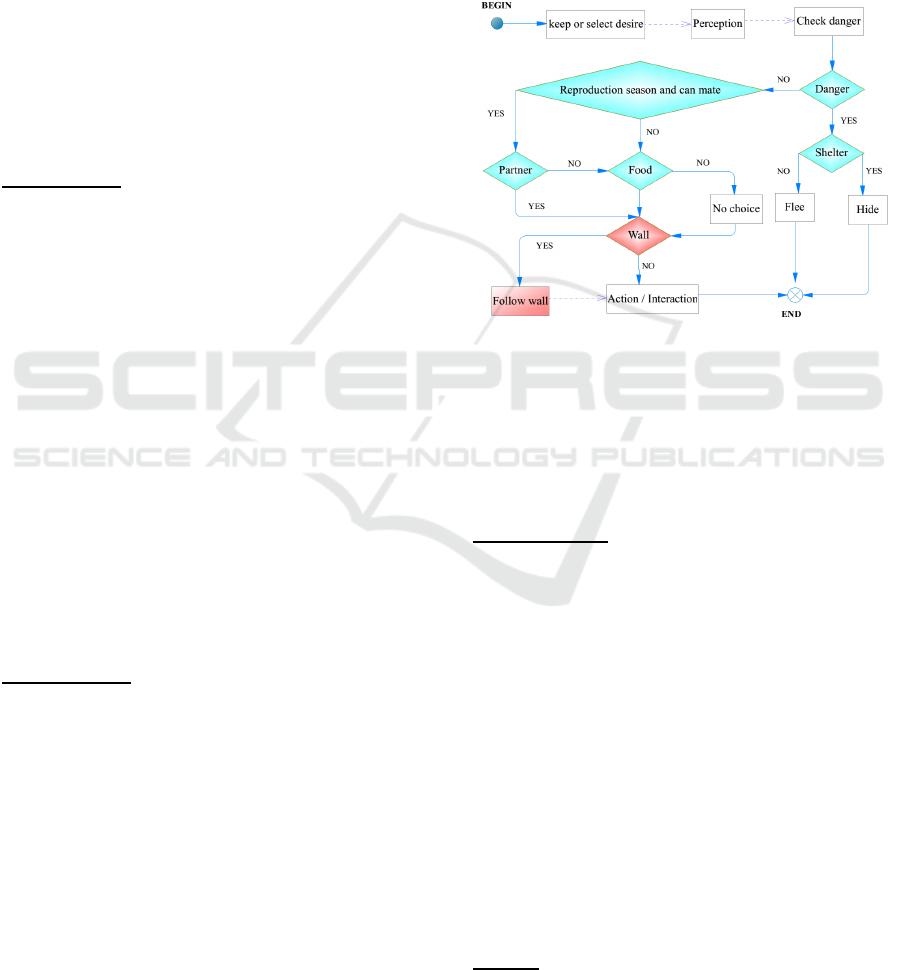
Figure 1: Simplified diagram of rodent agent activity at
each step. The nature of the Action/Interaction process
depends on the desire and target selected. Red shapes
correspond to the reactive architecture added to the gen-
eral model and describe in section 3.2.
3.1.4 Design Concepts
Basic Principle: Cognitive agents operate within
their environment using a scheme derived from (i)
PDE (perception / deliberation / execution; e.g.,
Macia Perez et al., 2014) and (ii) BDI
(Belief/Desire/Intention’; e.g., Caillou et al., 2015)
behavioural schemes (Le Fur and Sall, 2018).
Current desire (‘reproduction’, ‘suckling’,
‘spawning’, ‘foraging’, ‘none’) is first selected by
the agent depending on its physiological status. It
then proceeds to perception of its environment. De-
sire can here change into ‘flee’ or ‘hide’ if danger is
detected. Then, given the selected desire, the agent
chooses the most appropriate environment item to
interact with (deliberation) among the alternatives
corresponding to its desire. Once selected, the choice
is converted into a target (decision) and the next
move is computed (action).
Sensing: Rodent agents have a perception area en-
compassing object or agent within a circle defined
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
370
by a parameterized radius. The perception area
moves with the agent and is calculated precisely
from the continuous space coordinates.
Fitness: Rodent agents’ activity is driven by three
basic needs. The first is feeding, which is modelled
on the basis of optimal foraging in a patchy envi-
ronment (MacArthur and Pianka, 1966). The second
driving force is the need to maximize reproduction
rates which is formalized by systematic attempts at
mating whenever a rodent encounters a receptive (in
terms of reproduction season, maturity, etc.) indi-
vidual of the opposite sex. The agent’s third motiva-
tion is the need to remain as unnoticed as possible
when wandering, which is a key to its survival. This
led to the addition of the ‘wall following’ algorithm.
3.2 Wall Following Algorithm
In order to formalize this behaviour, we implement-
ed an algorithm composed of three component parts:
(i) modification of sensing to exclude perceived
objects hidden by walls, (ii) a process for reaching
the closest wall without entering in it and (iii) a
process for following the chosen wall according to
the direction (e.g., target position) selected by the
agent.
3.2.1 Filtering Perceived Objects
In the general model, agent perceive object within its
sensing disc area even if objects are beyond a wall.
We therefore introduced a filtering procedure that
scans all perceived objects and removes them from
the perceived objects’ list when a wall is detected
between the agent and the target.
3.2.2 Reaching Closest Wall
When aiming to any target, mice agents are here also
due to search for the closest wall and follow it to
perform their moves. For this purpose they follow
the general scheme described in Figure 2.
Figure 2: Sub-models involved in the process of reaching
the nearest wall.
The sub-model “compute nearest position” is
used by the agent to avoid positioning itself within
the wall cell. To do so, agent selects the interest cell
just before the selected wall cell.
In order to “compute movement direction”, the
agent records the vector formed by its position and
the nearest position targeted in front of wall cell.
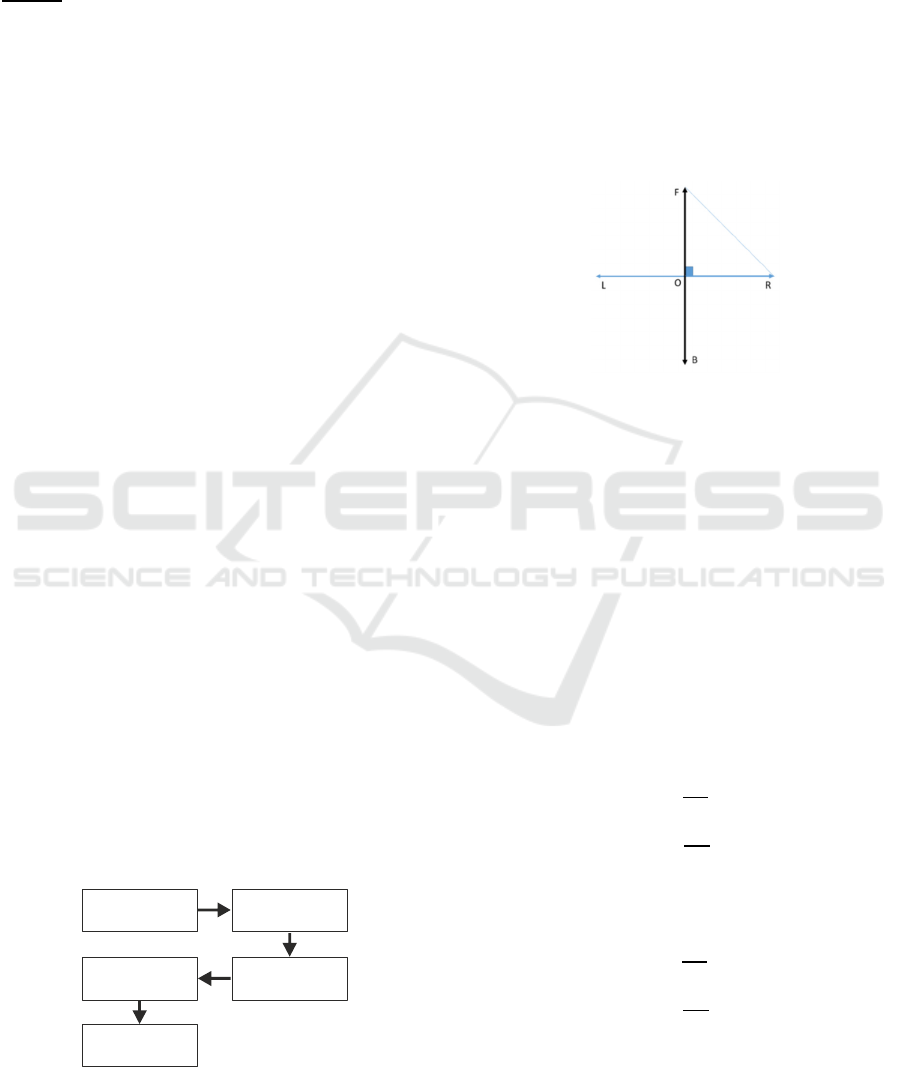
3.2.3 Wall Following
Once in front of the wall, the agent tries to skirt it by
choosing to go on its right or left. The notation used
for this computation is as described on Figure 3.
Figure 3: Representation of agent direction F(front),
R(right), L(left), B(back) and O(its current position).
For this purpose, the agent computes its new right
and left position using the perpendicular vectors
and
.
The Pythagorean Theorem and vector product leads
to:
²²²
.
||
||.||
||.cos
,
The right point R is then given by:
2
1
2
1
and the left point L with :
2
1
2
1
using N1 norm of the
and N2 norm of
.
The agent then starts to follow the wall according to
the scheme described in Figure 4.
compute nearest
position in front of
the selected wall cell
compute
movement
direction
get close to
the wall cell
select nearest
wall cell
perceive
environment
An Hybrid Algorithm to Simulate Mice Following Residential Walls
371
If wall position is forward then
Flag = random choose left or right
If Flag equals right then
If can go right then: select right aim
Else If can go back then: select back aim
Else select left aim
Else If can go left then: select left aim
Else If can go back then: select back aim
Else select right aim
Else If wall position is right then
If can go forward then: select forward
aim
Else If can go left then: select left aim
Else select back aim
Else If wall position is left then
If can go forward then: select forward
aim
Else If can go right then: select right aim
Else select back aim
Figure 4: Pseudo code for agent following the wall accord-
ing to its current direction (bold: sub-models not detailed
here).
At each step agent records its chosen aim and
recompute the new left, right, front and back accord-
ing to its new position.
4 RESULTS
We present in this section the simulation results of
(i) mice reactive behaviour in wall following algo-
rithm and (ii) the combination of this behaviour with
cognitive behaviour.
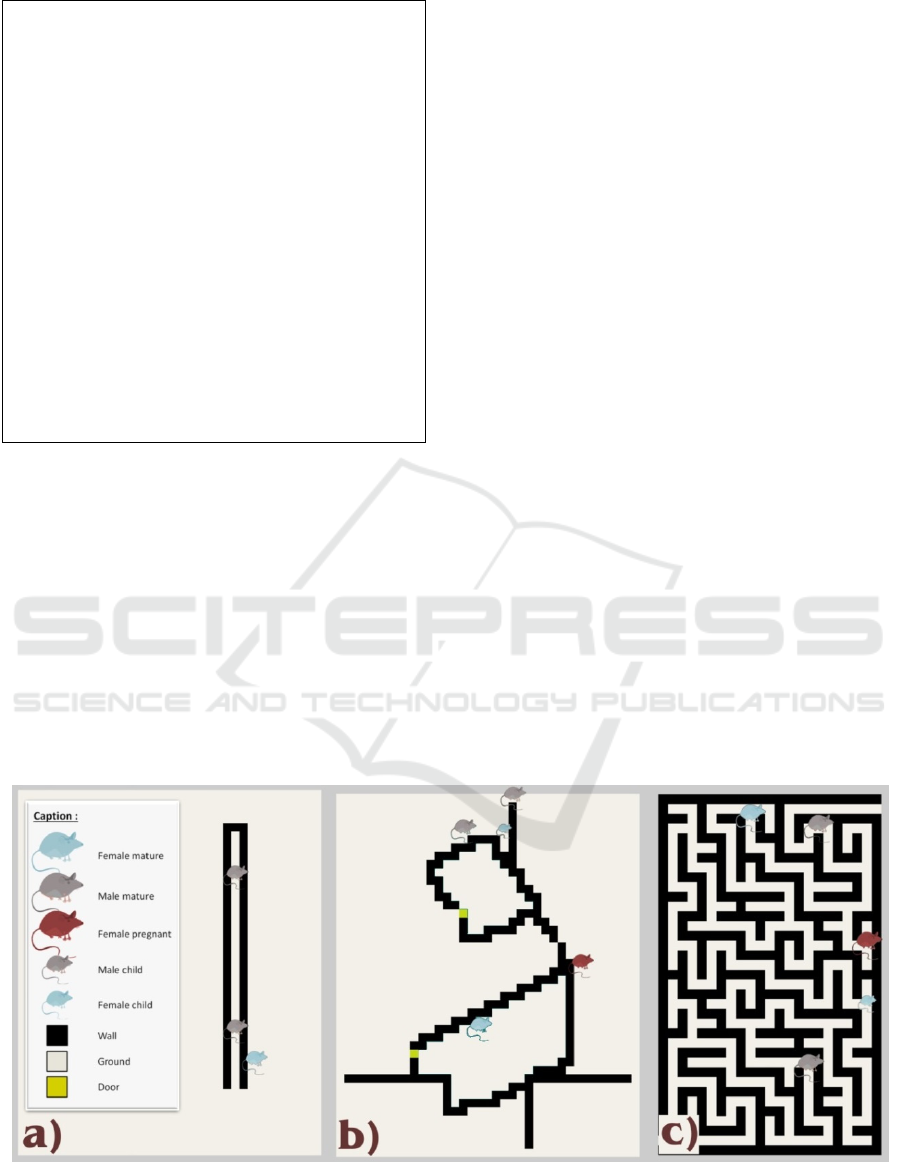
4.1 ‘Wall Following’ Algorithm
Robustness
To test the robustness of the ‘wall following’ algo-
rithm alone we used it in various space configura-
tions as presented on Figure 5. Using the algorithm,
agents proved able to enter and come out of a dead
end corridor without traversing walls or entering
wall cells. The second configuration confirmed that
the scheme described in Figure 5 was also efficient
to deal with the grid limits where one out of the four
directions is set to null. Finally a simulated maze
provided an overall satisfactory displacement of
agents whatever the walls configuration.
4.2 Reactive and Cognitive Behaviours
Combination
A second series of simulations was performed to
evaluate the realism of the hybrid algorithm. To this
end, we simulated an experimental concrete enclo-
sure and let agents evolve there. Only one cognitive
behaviour was selected for the test that is the en-
counter and mating process between relatives. These
simulation results were then presented to a biologist
specialized in these rodents (Granjon, L., pers.
comm. 2019). In the sequence (Figure 6) figured to
the expert: a) female slides along the upper wall
while male turn around a concrete block, b) male
perceives its relatives and aims toward it, c) mating
Figure 5: Three space configurations used to test the ‘wall following’ algorithm: a) dead end corridor. b) Domain extended
in the four directions minus one cell at the grid limit. c) Agents moving about in a simulated maze.
For better rendering, a dynamic representation of the simulation has been also uploaded on Youtube
™
and is available at
https://youtu.be/z5oS8elHD34.
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
372
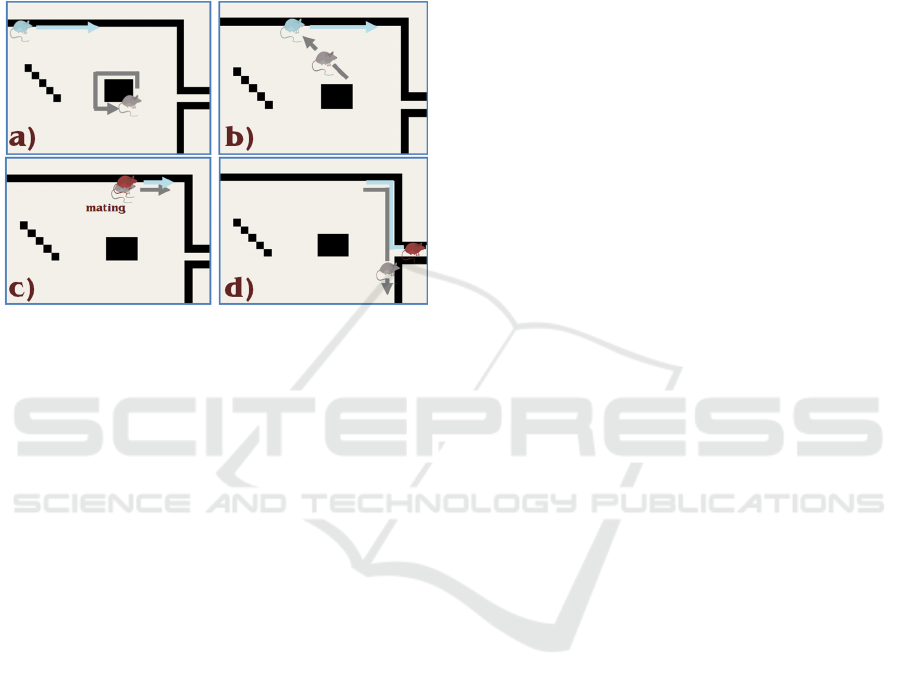
occurs then both agents switch back to wall follow-
ing d) rodent agents follow separate routes.
The biologist concluded to an overall satisfactory
rendering with the main characteristics to be taken
into account effectively expressed in the simulation:
basic foraging behaviour making use of thigmotaxis
as well as correct transition to mating behaviour at
the occurrence of a potential partner.
Figure 6: Simulation result (detail) of the combination of
‘wall following’ algorithm with the cognitive architecture
using a simulated experimental enclosure (see text for
sequence description). Same caption used as on Figure 5.
The simulated space in its entirety is featured on the
Youtube™ video. (ibid.).
5 DISCUSSION
The model developed here attempts to reproduce
rough mice behaviour in a residential habitat taking
into account their propensity to move along wall.
Using the hybrid architecture proposed, mice agents
are hence able to fulfil their three basic needs, i.e.,
feeding, reproducing and discrete wandering along
walls. Despite the mechanical computation used by
the agents, the ‘wall following’ algorithm proposed
cannot be considered as a genuine reactive architec-
ture since the process described implies that rodents
perceive the walls topology in their surroundings,
that is a cognitive process. However, the ‘wall fol-
lowing’ algorithm enables rodent agents to explore
their environment and follow walls without needing
a target.
The formalism used to represent space raises the
question of the grid resolution to be used. The cell
size scale chosen (1x1m) is suitable to formalize and
follow mice agents’ moves. However it may be
inadequate to formalize some components of the
environment (e.g., walls are at least one meter thick
that is unrealistic).
Given its simplicity, the algorithm has to be over-
loaded with several patches to account for particular
constraints:
1. To prevent agents from entering the walls,
agents have to target free cells contiguous to
wall cells.
2. To account for walls as obstacles for sensing,
agents' perception has to be filtered from invisi-
ble items beyond walls
3. To account for the simulated grid limits for
which one direction (left, right, front, back) is
missing, conditional tests have to be included in
the algorithm
4. To avoid infinite loops in which agents endless-
ly leave and return to the cell they just left, a di-
rection of movement has to be included in the
scheme.
The alternative modelling approaches described
in section 2 appear accurate and adapted to their
specific questions. They make use of various sophis-
ticated sensors and mechanisms to formalize moves
within a continuous environment. The method pro-
posed in this work results however in a model based
on a simple scheme mixing geometric calculations
and directional orientation within a discrete space. It
has been easily plugged with the general cognitive
behaviour architecture.
In a 2-D grid representation as it is used here, the
approach based on the concept of Finite State Ma-
chine applied in Agiriga (2011) model could also be
used. This method allows rodents to easily follow a
given direction and avoid vertical obstacles. Howev-
er, this method may not be relevant in large study
area like an entire city.
6 CONCLUSION
As a perspective, this algorithm can satisfactorily
fulfil the needs for a plausible simulation of mice
moves. It has to be embedded in a simulation model
encompassing a richer context including cats’ moves,
human activity rhythms, for more realistic simula-
tions. Encapsulating this model into a more compo-
site framework may there be straightforward, thanks
to its parsimony or simplicity.
At this position of this work and within a data poor
environment, the model can also be used as a simu-
lation tool helping to prepare the design of accurate
field protocols to tackle the question of mice wan-
dering in actual households.
An Hybrid Algorithm to Simulate Mice Following Residential Walls
373

ACKNOWLEDGEMENTS
We would like to thank Laurent Granjon for his help
as a rodent biologist expert to rodent behaviour
design and simulation outputs validation. We grate-
fully acknowledge support provided by CEA-MITIC
(The African Centre of Excellence in Mathematics,
Computer Science and ICT).
REFERENCES
Agiriga, E., Coenen, F., Hurst, J., Beynon, R., Kowalski,
D., 2011. Towards large-scale multi-agent based ro-
dent simulation: the “mice in a box” scenario. In In-
ternational Conference on Innovative Techniques and
Applications of Artificial Intelligence. pp. 369-382.
Springer, London.
Caillou, P., Gaudou, B., Grignard, A., Truong, C. Q.,
Taillandier, P., 2017. A Simple-to-use BDI architec-
ture for Agent-based Modeling and Simulation. Ad-
vances in Social Simulation. 2015:15-28.
Caluwaerts, K., Staffa, M., N’Guyen, S., Grand, C.,
Doll’e, L., Favre-Felix, A., Girard, B., 2012. A biolog-
ically inspired meta-control navigation system for the
Psikharpax rat robot. Bioinspir. Biomim. 7(2). Doi:
10.1088/1748-3182/7/2/025009
Faghihi, U., Poirier, P., Larue O., 2011. Emotional cogni-
tive architectures. In Proc. 4th Int. Conf. Affective
Comput. Intell. Interact. 487–496.
Ferber, J. 1999. Multi-agent systems: an introduction to
distributed artificial intelligence, Addison-Wesley
Reading.
Gill, A., 1962. Introduction to the Theory of Finite-state
Machines. McGraw-Hill.
Grimm, V., Berger, U., Bastiansen, F., Eliassen, S., Ginot,
V., Giske, J., … ., Huth, A., 2006. A standard protocol
for describing individual-based and agent-based mod-
els. Ecological modelling. 198(1-2), 115-126.
Jensen, S. P., Gray, S. J., Hurst, J. L., 2003. How does
habitat structure affect activity and use of space among
house mice?. Animal Behaviour. 66(2), 239-250.
Komma, V. R., Jain, P. K., Mehta, N. K., 2011. An ap-
proach for agent modeling in manufacturing on
JADE™ reactive architecture. The International Jour-
nal of Advanced Manufacturing Technology. 52(9-12),
1079-1090.
Le Fur, J., Sall, M., 2018. Using Flexible Time Scale to
Explore the Validity of Agent-Based Models of Eco-
system Dynamics: Application to Simulation of a Wild
Rodent Population in a Changing Agricultural Land-
scape.Proc. 8th Internat. Conf. Simul. And Mod-
el.Method., Technol.and Applic. (Simultech). Porto, ju-
ly 2018. DOI: 10.5220/0006912702970304
Le Fur, J., Mboup, P. A., Sall, M., 2017. A Simulation
Model for Integrating Multidisciplinary Knowledge in
Natural Sciences. Heuristic and Application to Wild
Rodent Studies. Proc. 7th Internat. Conf. Simul. And
Model.Method., Technol.and Applic. (Simultech), Ma-
drid. july 2017. 340-347.
Lin, T. C., Lin, H. Y., Lin, C. J., Chen, C. C., 2017. Mo-
bile robot wall-following control using a behavior-
based fuzzy controller in unknown environments. Ira-
nian Journal of Fuzzy Systems. DOI: 10.22111/ijfs.
2018.4108.
Lin, T. C., Chen, C. C., Lin, C. J., 2018. Wall-following
and Navigation Control of Mobile Robot Using Rein-
forcement Learning Based on Dynamic Group Artifi-
cial Bee Colony. Journal of Intelligent & Robotic Sys-
tems. 92(2), 343-357.
Lisitza A., Wolbring G., 2018. EcoHealth and the Deter-
minants of Health: Perspectives of a Small Subset of
Canadian Academics in the EcoHealth Community.
Internat. J. Environ. Res. Public Health.
15(8): 1688.
21p.
MacArthur, R. H., Pianka, E. R., 1966. On optimal use of
a patchy environment. The American Naturalist.
100(916), 603-609.
Macia-Perez, F., Lorenzo-Fonseca, I., Berna-Martinez,
J.V., 2014. A formal framework for modelling com-
plex network management systems. Journal of Net-
work and Computer Applications. 40:255-269.
Mencke N., 2013. Future challenges for parasitology:
vector control and ‘One-health’ in Europe: the veteri-
nary medicinal view on CVBDs such as tick borrelio-
sis, rickettsiosis and canine leishmaniosis. Veterinary
Parasit. 195: 256–271
Meyer, J. A., Guillot, A., Girard, B., Khamassi, M., Pirim,
P., Berthoz, A., 2005. The Psikharpax project: towards
building an artificial rat. Robotics and autonomous
systems. 50(4), 211-223.
Mishra, S., Bande, P., 2008. Maze solving algorithms for
micro mouse. In 2008 IEEE International Conference
on Signal Image Technology and Internet Based Sys-
tems. pp. 86-93.
Müller, J. P., 2002. Des systemes autonomes aux systemes
multi-agents: Interaction, émergence et systemes com-
plexes. Mémoire pour l’habilitation à diriger les re-
cherches. Université de Montpellier II. 46, 51-66.
Nepali, M. R., Yadav, N., Prasad, D. A. H.,
Balasubramaniam, S., 2014. A novel wall following
Algorithm for mobile robots. International Journal of
Robotics and Automation (IJRA). 5(2), 15.
North,M. J., Howe,T. R., Collier,N. T., Vos, J. R., 2005.
The Repast Simphony Development Environment. In,
Proc.Agent 2005 Conference on Generative Social
Processes, Models, and Mechanisms. 13-15.
Purbarani, S. C., Aâ, Q., Maâ, M. A., Rachmadi, M. F.,
2015. Simulation of landmark approach for wall fol-
lowing algorithm on fire-fighting robot using v-rep.
Jurnal Ilmu Komputer dan Informasi. 8(2), 100-110.
Reid, R. A., Reid, A. K., 2005. Route finding by rats in an
open arena. Behavioural Processes, 68(1), 51-67.
Schaat, S., Wendt, A., Kollmann, S., Gelbard, F., Jakubec,
M., 2015. Interdisciplinary development and evalua-
tion of cognitive architectures exemplified with the
SiMA approach. In Proc. EuroAsianPacific Joint
Conf. Cognit. Sci. pp. 515–520.
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
374

Sun, R., Peterson, T., Merrill, E., 1999. A hybrid architec-
ture for situated learning of reactive sequential deci-
sion making. Applied Intelligence. 11(1), 109-127.
Ye, P., Wang, T., Wang, F. Y., 2018. A survey of cogni-
tive architectures in the past 20 years. IEEE transac-
tions on cybernetics. (99), 1-11.
An Hybrid Algorithm to Simulate Mice Following Residential Walls
375
