
Towards Continuous Sensor Operation: Modelling a Secured Smart
Sensor in a Sparse Network Operated by Energy Harvesting
Thomas W. Pieber, Benjamin M
¨
oßlang, Thomas Ulz and Christian Steger
Institute for Technical Informatics, Graz University of Technology, Inffeldgasse 16/I, Graz, Austria
Keywords:
Energy Harvesting, NFC, Robotics, Smart Factory, Smart Home, Smart Sensors, Sparse Networks.
Abstract:
In modern society sensors are omnipresent. They gather information about their environment in order to
optimize production flows, minimize energy usage, learn about the environment, or maximize the owner’s
comfort. To achieve the desired goal in already existing buildings, sensors are introduced afterwards. These
sensors might not be able to connect to a sensor network because of obstacles or user policies. If this happens,
other mechanisms to create a network to gather the data need to be found. Additionally, these sensors should
last for a long period and are therefore probably powered using energy harvesting methods. In this paper we
present an approach for simulating the charging process of such sensors and connecting them to a network
using mobile communication partners.
1 INTRODUCTION
In our society we use sensors to automatically gather
data for almost every aspect of our environment. In
some applications the sensors cannot connect to a net-
work, either it is not feasible to build infrastructure to
connect the sensors (1) or they are not allowed to join
an existing network (2).
The first use case is most likely to arise in a sparse
sensor network such as when monitoring a wide area
or if obstacles such as buildings influence the com-
munication channel. Furthermore, this can arise in
an Industry 4.0 setting where sensors can be added at
any time and due to insufficient wireless coverage, in-
terferences, obstacles, or policies the sensors cannot
connect to the local network.
In the second case the sensors can collect data that
needs to be handled confidentially and are therefore
not allowed to be transmitted over a long-range wire-
less communication channel. This can also happen in
an Industry 4.0 scenario.
For these use cases mobile communication part-
ners (nodes) with additional computational power and
further capabilities can be introduced to connect the
sensor nodes to the data sink. These mobile partners
can be a worker or robot in a factory, a home owner
in his house, or an employee of the city. These com-
munication partners then need to estimate the urgency
of the collected data, the memory usage of the sensor,
and the energy level of the sensor nodes they should
connect to the network. This results in periodical vis-
its from the mobile node at any sensor. These visits
can furthermore be used to prolong the sensor’s oper-
ational time without much effort.
Additionally, when the nodes are visited and their
data is collected by the mobile node it may also be
possible to configure the sensors behaviour to account
for changing needs of the owner. To mitigate possible
threats that come from unauthorized personnel chang-
ing the configurations, the sensors need to be secured.
There are many proposed solutions that connect
the sensors to mobile nodes (eg. (Marta and Cardei,
2009; Ye et al., 2002; Kim et al., 2003)). Most
of these use traditional radio frequency communica-
tion to communicate the distance to the mobile node.
Transporting energy in addition to the data requires
other communication technologies such as Near Field
Communication (NFC). In this work we examine the
possibility of using NFC-enabled robots, or NFC-
enabled smartphones to charge, read out, and con-
figure sensor nodes which cannot be connected in a
traditional way. This should happen while the data is
gathered reliably and secured.
The design of such sensor nodes poses many com-
plex questions such as: “Where is the energy needed
the most?”, “How much energy can be saved by re-
ducing the sample frequency?”, or “How can the en-
ergy be used more effectively?”. To answer these
questions, simulations can be used to gain insights in
this complex topic. These simulations focus on the
Pieber, T., Mößlang, B., Ulz, T. and Steger, C.
Towards Continuous Sensor Operation: Modelling a Secured Smart Sensor in a Sparse Network Operated by Energy Harvesting.
DOI: 10.5220/0008053000570064
In Proceedings of the 9th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2019), pages 57-64
ISBN: 978-989-758-385-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
57

detailed description of the sensor system and try to
give detailed answers. This however neglects other
major questions such as: “How does the designed en-
ergy harvesting system perform?” or “How does the
environment affect the sensor communication?”.
This publication focuses on the creation of a sim-
ulation that is also able to answer questions like these.
To do this we created a simulation that focuses on
the gathering of time insensitive information using
sensor nodes in an environment that does not allow
long range wireless communication. Such scenario
might arise when measuring the temperature in an au-
tomated warehouse, the air humidity of a basement,
or the air quality in a city. In these scenarios, some
agents (robots or humans) constantly move through
the environment performing operations. We propose
that they can also collect the information from the
sensor nodes, keep them operational and adapt the
sensor nodes behaviour while these agents are per-
forming their jobs.
To effectively use such a method requires the prior
knowledge of the sensors energy consumption. This
is necessary as the sensors operational lifetime is lim-
ited by the stored energy. The periodic visits should
happen shortly before the internal memory is full or
the energy level drops below a certain level to opti-
mally use the mobile agent’s time. Thus, this publi-
cation explores a method to estimate the energy con-
sumption of a smart sensor and the possibilities that
energy harvesting offers to prolong the sensors life-
time.
The remainder of this paper is structured as fol-
lows: In Section II related work is described. This
section is split to emphasize the energy harvesting, the
energy usage estimation and the mobile data collec-
tion. The theory and approach of our experiments can
be found in Section III. Here we describe the hard-
ware prototypes, experiments and the performed sim-
ulations. Section IV is dedicated to the measurements
taken with the prototypes and compares it to the re-
sults of the simulations. Section V contains ideas on
how to improve on the findings of this paper. This
paper concludes in Section VI.
2 RELATED WORK
2.1 Energy Harvesting
Prolonging a battery powered sensor’s lifetime is the
goal of many publications. Most of the publications
include mechanisms for harvesting energy from the
surrounding. These harvesting methods include the
use of solar cells (Chen et al., 2010) or antennas
(Pinuela et al., 2013) to use electromagnetic radia-
tion, devices to convert heat gradients (Dziurdzia and
Stepien, 2011) to electrical energy, and mechanisms
to utilize mechanical energy (Choi et al., 2006).
All those methods are built to support the sensor
with a steady (or at least calculable) amount of en-
ergy. Thus, the sensors need only small energy stor-
age capacities to dampen energy fluctuations. (Kansal
and Srivastava, 2003; Kansal et al., 2007; Chen et al.,
2010; Tan and Panda, 2011).
J. Gummeson et al. (Gummeson et al., 2014) de-
veloped a small worn sensory device. This device is
embedded inside a ring which limits the size available
for energy storage. In their solution to this problem
they used NFC to recharge the internal storage when-
ever the user reaches for an NFC-enabled smartphone.
A similar approach can be used to operate larger de-
vices. In the case of a smart sensor the energy storage
can be made significantly larger, allowing for longer
operation between the recharging occurs. At the same
time larger antennas and more powerful NFC-readers
can reduce the time needed for recharging the sensor.
We also plan to use NFC to charge the sensor. In
contrast to the work of Gummeson et al. we want
to power a system that requires more energy.
A study from M. Rahimi et al. (Rahimi et al.,
2003) investigates the feasibility of mobile nodes in
order to provide energy to a sensor network. In this
study the authors show promising results of their pro-
totypical tests. This work focuses on the mechanisms
for searching for energy in an environment and how
the robots split the servicing (charging) of the sensor
nodes. They focus their research on quantifying the
power consumption of the network and specifying if
the network is sustainable.
In contrast to this research we focus on the com-
bination of energy transfer to the sensor nodes and
the simultaneous data collection performed by mobile
nodes.
Chen et al. (Chen et al., 2010) proposed and
demonstrated a nearly self sustaining micro sen-
sor that uses solar cells to generate the needed en-
ergy for sensing capacitance and temperature . This
approach to build a self-sustaining sensor network
seems promising but induces the need that the sensors
are subject to a sufficient light source which might not
be given in many scenarios. The work of Kansal et al.
(Kansal et al., 2007) described power management
techniques that can be used and they described how
such mechanism can be implemented with respect to
a known model of the desired energy source. That
can be used to improve the work of Chen et al. (Chen
et al., 2010). Additionally, such a model can be used
in the proposed model to optimize the sensor usage.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
58

In this paper we try to use NFC as communica-
tion technique to transmit data between a sensor and
a mobile node. In this approach a robot is acting as
the mobile node. This robot creates the connection to
the infrastructure, thus acting as a slow and random
link. The use of NFC furthermore allows us to trans-
mit power to the sensor supporting it for high power
operations and keeping it operational.
2.2 Energy Usage Estimation
The estimation of the energy consumption of sensors
is an ongoing research. There are approaches to min-
imize the energy consumption of sensor nodes based
on their specific energy levels and that take into ac-
count the energy levels of the surrounding nodes (Yan
et al., 2013).
Other researchers such as Halgamuge et al. (Hal-
gamuge et al., 2009) generated a model of a sensor’s
behaviour and try to estimate the energy consump-
tion of the sensor based on the information of the be-
haviour.
To get better results than pure estimation of the
energy consumption, we decided to create a research
prototype of a low-power sensor on which the energy
consumption can be measured.
2.3 Mobile Communication Partners
The idea of using mobile nodes in order to connect a
wide spread sensor network has been explored widely
in the existing literature. Most of these solutions use
erratic moving partners (such as animals in their habi-
tat who are equipped with a sensor node) to try to con-
nect all of the stationary nodes(Shah et al., 2003; Ulz
et al., 2017a; Rahimi et al., 2003).
The approach developed by Ulz et al. (Ulz et al.,
2017a) to connect industrial machines using robots as
links can be used to calculate the sensor node that
should be visited next.
In the work of Shah et. al. (Shah et al., 2003)
a multi-layer network with mobile nodes to connect
sensors with each other and with the data sinks was
proposed and explained. One of their main goals was
to minimize the sensors memory to decrease energy
demand. In their studies they proposed to mount the
mobile nodes on animals, roaming through their habi-
tat. In their assumption the mobile nodes (MULEs)
are performing a random walk and stumble upon the
sensors is not applicable to our use case. With that
we can simplify many of the calculations done in or-
der to get a reasonable memory size. Furthermore, as
the mobile partner can directly communicate with the
sensor, the sensor can suggest a return time for the
mobile partner to improve memory usage and sensor
lifetime.
Rahimi et. al. (Rahimi et al., 2003) describe an
approach for energy harvesting and distributing the
energy in a wireless sensor network (WSN) with the
help of mobile autonomous robots. In their approach
the robot moves through the observed area and finds
a spot with enough available solar energy to charge
the battery. The robot then moves towards the sensor
nodes which need the energy and charges them. With
this approach also sensors that can not harvest enough
energy to sustain themselves can be operated using
the delivered energy. This approach furthermore in-
creases the lifespan of the rest of the sensors as they
are provided with more energy than they could harvest
on their own. In our approach the sensors are not only
sustained by the mobile robot, but also their data is
collected. This cuts the energy demand for transmit-
ting the gathered data, allowing the sensors to operate
longer.
In our presented approach we use controllable
means of transportation in order to efficiently collect
all gathered data, update configurations of the sensors,
and charge the batteries. This controlled data collec-
tion can also provide means to predict the arrival of
new data and the possibility to have information on
the timeliness of the data.
3 APPROACH
Many systems, designed to be used as a sensor for
a sensor network, use batteries, wired electrical con-
nections, or continuous energy harvesting methods as
their main power source. To utilize short bursts of
energy as power source, the energy must be received
and the excess must be stored in a usable manner. To
do this, the energy is stored using accumulators or ca-
pacities. As we try to combine the transport of data
and the delivery of energy, NFC technology, and thus
energy bursts, are examined.
To use NFC as means of energy transport, the cir-
cuitry of the smart sensor must allow the extraction
of excess energy of the NFC field. Furthermore, the
excess energy must be directed to charge either a ca-
pacitor or an accumulator. This is done by extract-
ing electrical energy from the electromagnetic field.
The generated AC (alternating current) voltage is then
rectified and the voltage and current are controlled to
protect the sensor. To be more efficient, the circuitry
can include means of distinguishing between operat-
ing the sensor from the stored energy and operating
it from the NFC field and storing the excess energy.
This switching of operation mode can be performed
Towards Continuous Sensor Operation: Modelling a Secured Smart Sensor in a Sparse Network Operated by Energy Harvesting
59

by the sensor’s main controller.
To store the energy different solutions can be used.
For this domain the most useful solutions are accumu-
lators or capacitors. The energy density of capacitors
is lower in comparison to accumulators. This means
that capacitors can hold less energy. In contrast to that
the power density of capacitors is larger. This allows
capacitors to store and draw energy faster than equally
sized accumulators (Zhang et al., 2013).
We decided to use a super-capacitor based devel-
opment board as basis for the research prototype mea-
suring the energy provisioning system (henceforth
Prototype A).In addition to the prototype to measure
the energy provisioning system, we created a research
prototype on which the energy consumption of the
sensor components can be measured (henceforth Pro-
totype B).
Using these research prototypes, we gather data to
set up simulations that can represent the interactions
between the sensors and the mobile agents, as well as
help in gathering data to optimize the agent’s visiting
schedule. Here a simulation approach by Pieber et al.
(Pieber et al., 2017a; Pieber et al., 2017b) can be used
to connect the simulation of a smart sensor system to
a simulation that is more capable of simulating the
interaction between an agent and the sensor.
3.1 Research Prototypes
3.1.1 Prototype Overview
An MSP430FR5969 development board (TI, 2014) is
chosen as a basis for Prototype A. This board includes
a super-capacitor as energy source, a microcontroller
tailored for low power use, and a temperature sen-
sor. It is then extended with a custom made PCB to
connect an NFC interface (ams AG, 2006), capable
of handing energy to the host system. The extension
PCB can be configured using jumpers to allow differ-
ent communication channels. This PCB furthermore
features a simple power management system that lim-
its the power that can reach the super-capacitor and
can switch between the available power sources such
that the capacitor can be charged when an NFC field
is present. A circuit plan of the prototypical PCB is
shown in Figure 1.
Prototype B consists of three parts. The Energy
Measurement Unit (EMU, Testbench), a control com-
puter, and the Smart Sensor itself. As basis for the
EMU another PCB was designed. This is fitted to
an MSP340FR5969 board that gathers the data and
acts as a bridge between the measurement unit and
the control computer.
The smart sensor consists of a microcontroller, inter-
face ports, additional memory, an NFC interface, and
a security co-processor. Each of these components is
supplied by an energy channel coming from the mea-
suring testbench. Additionally, most components can
be cut from the power supply to reduce the energy de-
mand of the sensor.
The testbench is controlled by a LabVIEW computer
simulating the energy provisioning system. This is
done by reading the energy demand of the sensor and
setting the supply voltage according to the capabili-
ties of the simulated provisioning system. In addition
to the supply voltage the LabVIEW script also sets
the digital potentiometers to adapt the gain of the cur-
rent sensors. Using the information about the current
drawn by the sensor components and the voltage of
the system, an energy profile can be created that can
be used to create simulations describing similar sen-
sors. The design for Prototype B is shown in Figure
2.
3.1.2 Prototype Details
When the NFC antenna of Prototype A is subjected to
an NFC field, a DC (direct current) voltage is gener-
ated. This voltage is represented as NFC DC in Fig-
ure 1. If this voltage is larger than the voltage at the
capacitor C connected to CHARGE+ the controller
switches the analog-switch connected to GPIO such
that the capacitor is connected to the voltage source
via the resistor (723 Ω). This controls the current
that can pass through the capacitor. If the voltage
difference between CHARGE+ and VCC is smaller
than a threshold, the switch is flipped and the resis-
tor is short-circuited. This leaves the capacitor con-
nected to VCC via the Schottky diode D. With this
the current can not flow to the capacitor and it will
not be charged any more. If the voltage of NFC DC is
smaller than the voltage of the capacitor at VCC, the
controller is powered from the capacitor. Should the
voltage at VCC drop below a threshold, the controller
switches in a low-power mode and waits for a voltage
increase at VCC to start the charging again.
The voltages and currents that are present in the sys-
tem can be measured at the jumper pins on the PCB.
The most interesting values are the voltage at the ca-
pacitor, the voltage that reaches the sensor and the
current that is drawn by the sensor.
The three parts of Prototype B are shown in Fig-
ure 2. The Smart Sensor, the Testbench, and the Com-
puter/Control are represented as the boxes that com-
bine the necessary elements.
The Control is located at a LabVIEW computer. This
computer receives the measurements of the testbench
and sets the control signals for the testbench such that
a specified energy provisioning behaviour is reached.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
60

Figure 1: Circuit of the energy provisioning system of Pro-
totype A.
The Testbench receives these signals and controls the
variable voltage source and the digital potentiometers
according to the control signals. It furthermore relays
the measurement values of the current sensors to the
Control computer. The Testbench has seven variable
gain current sensors that can be used to observe the
behaviour of the device under test.
The device under test - in this case the Smart Sensor
- consists of six components, and therefore uses six
measurement channels. The control unit of the sensor
is an Ambiq Micro Appollo 2 MCU. This controller
is connected via an I
2
C bus to an Optiga Trust X Se-
curity Co-Processor. Another separate I
2
C bus con-
nects to an additional FRAM module as well as to an
NFC Interface. Additionally, two External Ports are
connected via IO pins. At these interfaces, different
expansion modules can be connected. Using the IO
pins, I
2
C or SPI buses can be simulated to communi-
cate with sensors, actuators, or other controllers.
Using Load Switches, the controller is able to cut dif-
ferent components off the energy supply to reduce the
energy demand of the smart sensor as far as possible.
This setup allows the measurement of the energy de-
mand of each component of a smart sensor in a flexi-
ble way.
3.2 Simulation
The data generated from the prototypes is fed into
simulations describing similar sensor systems. These
simulations are necessary, as we are interested in the
behaviour of the sensor in combination with different
systems.
To get a more abstract system description of a smart
sensor the gathered data needs to be generalized.
Thus deviations in the results of the simulations from
the measurements are expected.
To describe the sensor system electrically, a simula-
tion using a SPICE program is created that represents
the smart sensor. Here simplified but usable param-
eters can be extracted that are used in the calcula-
tions for the energy consumption of the smart sensor.
The gathered parameters are then used to describe the
electrical behaviour of the sensor is subsequent simu-
Figure 2: Design of Prototype B.
lations.
The simulation of the sensor itself is written in
SystemC as it allows the description of the entire sys-
tem at different levels of abstraction. This is espe-
cially useful as the accurate simulation of a complex
system impedes the simulation performance. This is
counteracted by performing simulations on a more ab-
stract level.
The environment is simulated using the Gazebo sim-
ulator, a simulation tool commonly used for robotic
purposes. These two simulations are connected us-
ing a method developed by Pieber et al. (Pieber et al.,
2017a). In Figure 3 such a simulation run can be seen.
The robot interacts with the sensor, charging it, col-
lecting data, and possibly reconfiguring it to alter the
sensors behaviour. Using this simulation technique,
the sensor simulation gets the stimuli from the envi-
ronment and reacts according to it. This allows the
quick creation of new test cases and stimuli, as well
as the automatic evaluation of sensor responses.
Within the Gazebo environment, it is possible to
align the antennas in various orientations to each
other. Additionally, it is possible to introduce extra
noise (such as noise from nearby communications or
multi-path signal propagation) to the communication.
This allows to find the answers to the questions asked
in Section 1.
Summarized, this means that the measurements of
the prototypes are used to generate a SPICE simula-
tion. Parameters are extracted from this simulation
that can be used to describe the electrical behaviour
of the sensor. This description is done in SystemC. To
subject the SystemC simulation to stimuli, the Gazebo
simulator is used. This is done in order to quickly
change the alignment of the NFC antennas and to in-
Towards Continuous Sensor Operation: Modelling a Secured Smart Sensor in a Sparse Network Operated by Energy Harvesting
61

Figure 3: Simulation of an interaction between robot and
sensor.
troduce additional noise to the system.
This simulation yields data about the interaction
of the smart sensor with the environment in differ-
ent situations. Furthermore, information about the
energy usage during operation as well as information
about the memory usage of the stored values are cre-
ated. This information, in connection with informa-
tion about the type of generated data, can then be used
by a mobile node to calculate the need to visit the sen-
sor node to collect data and recharge it.
If multiple sensors are connected in this way, a sen-
sor network is created using the robots as links be-
tween themselves and the infrastructure. This method
was described by Ulz et al. (Ulz et al., 2017a) as a
“Sneakernet on Wheels”.
4 MEASUREMENTS AND
RESULTS
Prototype A is designed to measure the energy har-
vesting capabilities of the NFC connection. A typi-
cal measurement of this prototype can be seen in Fig-
ure 4. In this measurement the capacitor was charged
for approximately 120 sec. During this time the volt-
age at the capacitor (middle line) reached the nom-
inal voltage. After that the NFC field was switched
off and the voltage at the rail (bold line) drops be-
low the voltage at the capacitor. The current through
the sensor (fine line) also drops significantly as the
controller switches to a low-power mode. After that
the controller awakes every 60 sec to take a measure-
ment. At this times the current rises and the voltage at
the rail drops as the capacitor and diode pose a resis-
tance to the current. Again at 360 sec the NFC field is
switched on briefly.
The operation of the smart sensor is measured us-
ing Prototype B. In Figure 5 a sample measurement is
shown. In this example the controller switches on an
Figure 4: Measurement of the charging of Prototype A.
Figure 5: Current flow during measurements at Prototype
B.
external sensor at port EXT-1. After that, it waits un-
til the sensor has initialized itself and starts the mea-
surement. In this test, the controller finally saves the
gathered data and shuts down the sensor.
The microcontroller (uC) current rises at the start of
the measurement as the sensor module starts its op-
eration. During the communication with the sensor
and the subsequent storing of the gathered values the
power consumption and therefore the needed current
rises further.
The continuous high current at EXT2 is generated by
other sensor hardware. Furthermore, the current us-
age by the Security Controller (SC), and the FRAM
and NFC modules are increased at the start of the
measurement routine.
Using the available data and the data from the
SPICE simulations, a model can be created that shows
the energy consumption of a generic smart sensor.
Figure 6 shows the results of a simulation using the
sensor model. In this simulation the charging be-
haviour of the sensor was simulated. This behaviour
is comparable to the measurements of Prototype A,
thus a valid simulation has been created this way.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
62
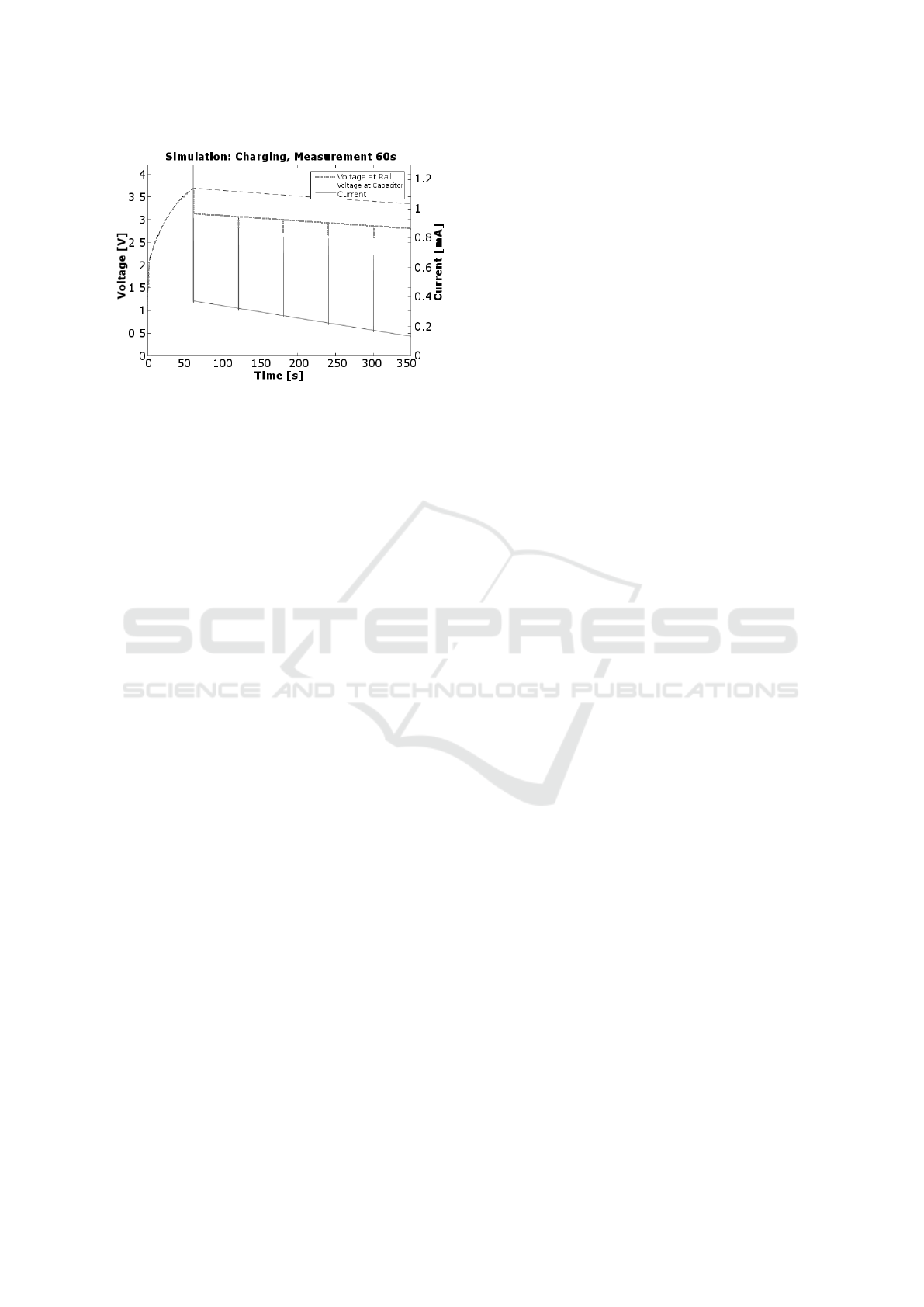
Figure 6: Simulation of the sensor charging.
These results help in predicting the time it takes to
charge one sensor using NFC energy harvesting and
can furthermore help in estimating the time it needs
to discharge the smart sensors energy storage.
In summary these results show that the charging
of a smart sensor using NFC is possible. To charge
the 0.5 F capacity approx. 2 minutes are needed. This
also depends on external parameters such as the align-
ment of the antennas. The simulation of the sensor
furthermore shows that the sensors operational time
primarily depends on its duty cycle. While the sensor
can be operated for approximately one day when per-
forming measurements every hour, the lifetime is cut
to about seven hours when measuring every minute.
5 FUTURE WORK
Using the prototypes we can perform measurements
of security relevant operations. As Prototype B also
features a security coprocessor, we want to perform
experiments determining the difference in energy us-
age during cryptographic operations. These experi-
ments can show the requirements smart sensors and
the energy provisioning systems need to fulfil to en-
able secured data handling. We are planning to take
measurements of user authentication algorithms on
smart sensors such as the one proposed by Pieber et
al. (Pieber et al., 2017c), and testing data transmis-
sion protocols that secure the transmitted data using
encryption and forward error correction such as the
one proposed by Ulz et al. (Ulz et al., 2017b).
6 CONCLUSION
In this paper we showed the development of secured
smart sensor platforms. Two prototypes are used to
evaluate (1) the energy harvesting possibilities that
arise when using NFC technology, and (2) the energy
consumption of the main components of a smart sen-
sor. These results are then used to implement simula-
tions of the sensors. The simulations are able to not
only simulate the smart sensor but also the environ-
ment. This is then used to answer crucial questions
about the efficiency of the energy harvesting possi-
bilities and the influence the environment has on the
communication.
ACKNOWLEDGEMENTS
This project has received funding from the Electronic
Component Systems for European Leadership Joint
Undertaking under grant agreement No 692480. This
Joint Undertaking receives support from the European
Union’s Horizon 2020 research and innovation pro-
gramme and Germany, Netherlands, Spain, Austria,
Belgium, Slovakia.
IoSense is funded by the Austrian Federal Ministry
of Transport, Innovation and Technology (BMVIT)
under the program ”ICT of the Future” between
May 2016 and May 2019. More information
https://iktderzukunft.at/en/.
REFERENCES
ams AG (2006). ams AS3955 NFC Interface Tag.
http://ams.com/eng/Products/Wireless-Connectivity/
Sensor-Tags-Interfaces/AS3955.
Chen, G., Fojtik, M., Kim, D., Fick, D., Park, J., Seok,
M., Chen, M.-T., Foo, Z., Sylvester, D., and Blaauw,
D. (2010). Millimeter-Scale Nearly Perpetual Sensor
System with Stacked Battery and Solar Cells. In 2010
IEEE International Solid-State Circuits Conference -
(ISSCC). IEEE.
Choi, W. J., Jeon, Y., Jeong, J.-H., Sood, R., and Kim, S. G.
(2006). Energy harvesting MEMS device based on
thin film piezoelectric cantilevers. Journal of Electro-
ceramics, 17(2-4):543–548.
Dziurdzia, P. and Stepien, J. (2011). Autonomous wire-
less link powered with harvested heat energy. In
2011 IEEE International Conference on Microwaves,
Communications, Antennas and Electronic Systems
(COMCAS 2011). IEEE.
Gummeson, J., Priyantha, B., and Liu, J. (2014). An En-
ergy Harvesting Wearable Ring Platform for Gesture
Input on Surfaces. In Proceedings of the 12th Annual
International Conference on Mobile Systems, Appli-
cations, and Services, MobiSys ’14, pages 162–175,
New York, NY, USA. ACM.
Halgamuge, M. N., Zukerman, M., Ramamohanarao, K.,
and Vu, H. L. (2009). An Estimation of Sensor En-
Towards Continuous Sensor Operation: Modelling a Secured Smart Sensor in a Sparse Network Operated by Energy Harvesting
63

ergy Consumption. Progress in Electromagnetics Re-
search, 12:259–295.
Kansal, A., Hsu, J., Zahedi, S., and Srivastava, M. B.
(2007). Power Management in Energy Harvesting
Sensor Networks. ACM Trans. Embed. Comput. Syst.,
6(4).
Kansal, A. and Srivastava, M. (2003). An Environmental
Energy Harvesting Framework for Sensor Networks.
In Proceedings of the 2003 International Symposium
on Low Power Electronics and Design, 2003. ISLPED
2003. ACM.
Kim, H. S., Abdelzaher, T. F., and Kwon, W. H. (2003).
Minimum-Energy Asynchronous Dissemination to
Mobile Sinks in Wireless Sensor Networks. In Pro-
ceedings of the first international conference on Em-
bedded networked sensor systems - SenSys 2003.
ACM Press.
Marta, M. and Cardei, M. (2009). Improved sensor network
lifetime with multiple mobile sinks. Pervasive and
Mobile Computing, 5(5):542–555.
Pieber, T. W., Ulz, T., and Steger, C. (2017a). SystemC Test
Case Generation with the Gazebo Simulator. In Pro-
ceedings of the 7th International Conference on Sim-
ulation and Modeling Methodologies, Technologies
and Applications - Volume 1: SIMULTECH,, pages
65–72. INSTICC, SciTePress.
Pieber, T. W., Ulz, T., and Steger, C. (2017b). Using Gazebo
to Generate Use Case Based Stimuli for SystemC. In
International Conference on Simulation and Modeling
Methodologies, Technologies and Applications, pages
241–256. Springer.
Pieber, T. W., Ulz, T., Steger, C., and Matischek, R.
(2017c). Hardware Secured, Password-based Authen-
tication for Smart Sensors for the Industrial Internet of
Things. In International Conference on Network and
System Security, pages 632–642. Springer.
Pinuela, M., Mitcheson, P. D., and Lucyszyn, S. (2013).
Ambient RF energy harvesting in urban and semi-
urban environments. IEEE Transactions on Mi-
crowave Theory and Techniques, 61(7):2715–2726.
Rahimi, M., Shah, H., Sukhatme, G., Heideman, J., and
Estrin, D. (2003). Studying the Feasibility of En-
ergy Harvesting in a Mobile Sensor Network. In 2003
IEEE International Conference on Robotics and Au-
tomation (Cat. No.03CH37422). IEEE.
Shah, R. C., Roy, S., Jain, S., and Brunette, W. (2003). Data
MULEs: Modeling and Analysis of a Three-tier Ar-
chitecture for Sparse Sensor Networks. Ad Hoc Net-
works, 1(2-3):215–233.
Tan, Y. K. and Panda, S. K. (2011). Energy Harvesting
From Hybrid Indoor Ambient Light and Thermal En-
ergy Sources for Enhanced Performance of Wireless
Sensor Nodes. IEEE Transactions on Industrial Elec-
tronics, 58(9):4424–4435.
TI (2014). MSP430FR5969 LaunchPad (TM) Devel-
opment Kit User’s Guide. http://www.ti.com/lit/
ug/slau535b/slau535b.pdf.
Ulz, T., Haas, S., Pieber, T., Steger, C., and Matischek, R.
(2017a). Sneakernet on Wheels: Trustworthy NFC-
based Robot to Machine Communication. In 2017
IEEE International Conference on RFID Technology
& Application (RFID-TA), pages 260–265. IEEE.
Ulz, T., Pieber, T., Steger, C., Matischek, R., and Bock, H.
(2017b). Towards trustworthy data in networked con-
trol systems: A hardware-based approach. In Emerg-
ing Technologies and Factory Automation (ETFA),
2017 22nd IEEE International Conference on, pages
1–8. IEEE.
Yan, R., Sun, H., and Qian, Y. (2013). Energy-aware sen-
sor node design with its application in wireless sensor
networks. IEEE Transactions on Instrumentation and
Measurement, 62(5):1183–1191.
Ye, F., Luo, H., Cheng, J., Lu, S., and Zhang, L. (2002). A
Two-Tier Data Dissemination Model for Large-scale
Wireless Sensor Networks. In Proceedings of the 8th
annual international conference on Mobile computing
and networking - MobiCom 2002. ACM Press.
Zhang, F., Zhang, T., Yang, X., Zhang, L., Leng, K.,
Huang, Y., and Chen, Y. (2013). A high-performance
supercapacitor-battery hybrid energy storage device
based on graphene-enhanced electrode materials with
ultrahigh energy density. Energy & Environmental
Science, 6(5):1623.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
64
