Understanding Behavioural Conflict between the Drivers and
Adaptive Cruise Control (ACC) System in Cut-in Scenario
Jing Gong
1
, Fang You
1
, Jian-min Wang
1
and Xiao-long Zhang
2
1
Car Interaction Design Lab, Tongji University, Caoan Highway, Shanghai, China
2
College of Information Science and Technology, Pennsylvania State University, University Park, PA, U.S.A.
Keywords: Adaptive Cruise Control (ACC), Human-Machine Interface Design, Human-Machine Cooperation,
Human-Machine Conflict.
Abstract: In the cut-in scenario of the ACC system, there is often a lack of harmony between people and cars due to the
limitations of sensors and control strategies. Finding and solving the conflict between the driver and the
machine is essential to achieve harmonious Human-Machine Cooperation. This research is to understand the
conflict between the driver and ACC system in the cut-in scenario based on the previous work of driver trust
experiment. The research selected eight drivers for in-depth interview, and the results showed that the biggest
conflict between the driver and ACC was that the driver's cognitive and behavioural patterns were
significantly different from the ACC system. It is mainly reflected on three aspects: the different definition of
the cut-in scenario, the risk perception and the stress of the impending danger, and the perceptual process of
cut-in scenario. In order to reduce human-machine conflict, the research proposed three design strategies: (1)
Redefine the cut-in scenario based on the driver's cognition. (2) Keep the ACC human-machine interface
consistent with the driver's psychological perception. (3) Help drivers cope with dangerous scenario with three
levels of warning signals: guidance information, warning information and takeover information.
1 INTRODUCTION
The Advanced Driving Assistant System (ADAS) can
help drivers reduce burdens and improve safety,
comfort and convenience in driving, and has been
widely used in recent years. With the development of
sensor technology and data acquisition and
processing technology, sensory deficits of the driver
are compensated by technical sensors; for example,
the limited vision at night of drivers is enhanced by
night vision systems. These domains are commonly
referred to Human-Machine Cooperation (HMC) and
Cooperative Systems (COS) (Bengler K et al., 2012).
Hoc (Hoc, 2001) has detailed a precise definition of
cooperation that is consistent with most of the
literature:
Two agents are in a cooperative situation if they
meet two minimal conditions. (1) Each one strives
towards goals and can interfere with the other on
goals, resources, procedures, etc. (2) Each one tries to
manage the interference to facilitate the individual
activities and/or the common task when it exists. The
symmetric nature of this definition can be only partly
satisfied (Hoc, 2001).
The Adaptive Cruise Control (ACC) is a
comfortable, intelligent driving assist that can
maintain a steady state of driving depending on the
driver's pre-set speed and pre-set distance. But in
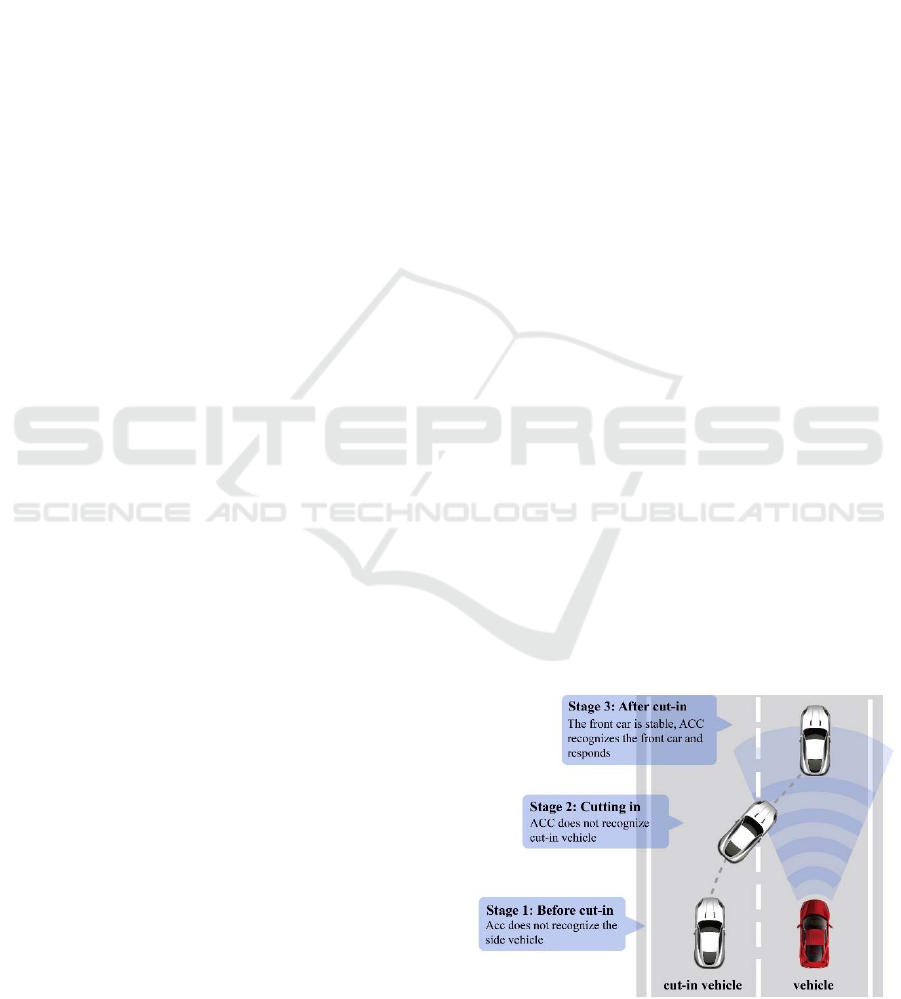
some scenarios, there are still limitations. As shown
in Fig.1, the cut-in vehicle changes lane and becomes
the new front vehicle for the ACC system, but the
ACC is not always quick to identify and lock the front
Figure 1: The response of ACC in cut-in scenario.
Gong, J., You, F., Wang, J. and Zhang, X.
Understanding Behavioural Conflict between the Drivers and Adaptive Cruise Control (ACC) System in Cut-in Scenario.
DOI: 10.5220/0008053600970103
In Proceedings of the 3rd International Conference on Computer-Human Interaction Research and Applications (CHIRA 2019), pages 97-103
ISBN: 978-989-758-376-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
97
vehicle. If the speed at which the ACC system is set
faster than the current speed of the vehicle, the
vehicle will continue to accelerate until one of the
following events occurs: the system reaches its set
speed; the system recognizes and catches the new
guided vehicle; the driver takes over the ACC system
(Larsson et al., 2014).
The driver takes over ACC without being
prompted, which means that the disruption of human-
machine cooperation of controling the vehicle. The
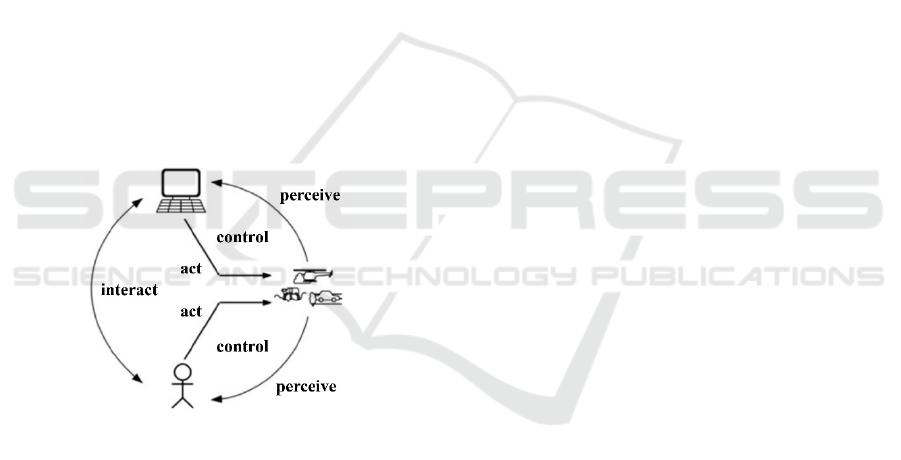
study by Frank et al., (2012) suggests that the
dynamic balance of the human-machine system must
have a cycle of perception, decision-making, and
action (Fig.2). In the perceptual stage, the difference
between the driver and the human-machine system is
the greatest. Firstly, the two are different to the
perception of the environment and the judgement of
the danger. Secondly, the cut-in scenario is a short
dynamic process, which may increase the cognitive
load of drivers, and requires the driver to have
sufficient situational awareness and reaction ability.
Thirdly, the takeover itself is a behaviour that requires
high perception load, which leads to a longer reaction
time (Tsang-Wei Lin, 2009). All of these has
implications for drivers taking over ACC.
Figure 2: The response of ACC in cut-in scenario.
In previous studies. Pengjun et al., (2005) showed
that the degree to which drivers take over ACC
manually depends on a number of factors, and an
important one is the difference between the ACC's
performance and the driver's expectations. This is
consistent with Wouter (Wouter et al., 2017) and
Bobbie (Bobbie et al., 2015). In Brian's research
(Brian et al., 2012), it is pointed out that how drivers
make decisions is not based on external
circumstances, but based on perceived mental
representations. In the cut-in scenario, the driver's
mental representation is consistent with the ACC's
control strategy, which directly leads to the driver
taking over the vehicle to avoid risk. Because the
psychological model of different drivers is different,
their mental representations will be changed
according to the degree of familiarity and degree of
trust of the ACC system. It is almost impossible to get
the ACC system's control strategy exactly the same as
the driver's mental model, but it can reduce the
difference between the perceptual stage in the human-
machine interface: not only should the driver be
notified of the behaviour and state of the ACC
system, but also the driver should be guided by the
driver's perception of the cut-in scenario.
In recent years, scholars have come up with new
ideas about how to design Intelligent Manufacturing
Systems (IMS), replacing techno-centered design
with human-centered design. Some scholars have
worked on Human-Machine Cooperation, Levels of
Automation and Situation Awareness, and Human-
Automation Symbiosis (May et al., 2014; Millot,
2014; Romero et al., 2015.) (Pacaux-Lemoine et al.,
2017). In order to improve the efficiency of human-
computer interaction, the study of Bjørn Solvang et
al., (2012) discusses the cooperative mode and
interaction between human operators and machines,
and presents an open control system for new and old
equipments. The study by Oborski (Oborski et al.,
2004) suggests that the whole system performance
depends on human decisions, and the significant
stress should be put on the problem of human-
machine and human-computer systems co-operation.
In Pacaux’ study (Pacaux et al., 2017) proposed a
principle to retain humans in the process control loop
with different levels of involvement identified by the
levels of automation.
This research is also based on the idea of human-
centered design, studying how people and machines
can collaborate better and improve people's
productivity.
2 RESEARCH METHOD
2.1 ACC Cut-in Scenario Analysis
This study discusses the human-machine relationship
and driving condition of the driver and ACC system
in the cut-in scenario. It is pointed out that the human-
machine collaborative control is the ideal state of
human-machine interaction, which provides the basic
theoretical guidance for in-depth interview and
human-machine interface design.
The state of human-machine driving can be
divided into four types according to the role of driver
and machine in driving a vehicle: both of them leave
it alone; the vehicle is driven by the intelligent driving
CHIRA 2019 - 3rd International Conference on Computer-Human Interaction Research and Applications
98

Figure 3: Human-Machine cooperative driving status of ACC in cut-in scenario.
system (ACC); driver controls the vehicle; driver and
intelligent driving system (ACC) work together to
control vehicles through human-machine interface.
As shown in Fig.3, in the ACC cut-in scenario,
these four conditions are:
(1) The machine is left unattended: because of the
shortcomings of the ACC sensor, it was unable to
identify the side vehicles. And because of the driver's
trust in ACC, the driver may not have noticed the side
vehicle during the side car's cutting-in.
(2) Intelligent driving system (ACC) controls the
vehicle: the vehicle senses the cut-in vehicle and
processes it before the driver intervenes. The premise
of this is that the ACC is fully trusted, but this leads to
two results: the ACC's steady and safe completion of
the vehicle task; and the ACC's delay in the driver's
expectation, which reduces the driver's trust in the
ACC system.
(3) The driver controls the vehicle: the vehicle senses
the cut-in vehicle, but the brake time is later than the
driver's expectation, or the two vehicles’ distance is
less than the driver's safety expectation, and the driver
takes over vehicle initiatively. Another is when the
car and the side car driving normally. However, people
have the ability to predict and feel that the side car want
to cut in, then he takes over in advance when the side
car gets closer and closer to the side lane line.
(4) Human-machine cooperative control: the vehicle
will perceive information such as the current state and
behaviour of ACC, current environment information,
etc., through the interactive interface to the driver.
ACC system can actively decelerate, and human
interface can warn the driver in advance, so that the
driver can take over in time.
2.2 Experimental Design and In-depth
Interview
The interview was based on a previous work that
researches the driver's trust in the ACC in cut-in
scenario. The experiment uses v-box to capture the
actual driving video (the dashboard interface and the
external environment, both in sync) when the Volvo
XC90 turns on the ACC and cuts in. As shown in fig.4,
the experiment simulated real-life road scenes on a
driving simulator, and placed the dashboard video on
the iPad in front of the steering wheel to simulate the
real dashboard. The experiment has set up six
conditions, respectively, the speed of the car was
V=30km/h, 50km/h, 60km/h, and the distance between
the two vehicles was THW=0.7s, 1.2s. By evaluating
drivers ' trust in ACC to understand the relationship
between drivers and ACC, the results showed that the
speed and THW values had a definite effect on the
level of trust that the driver had when he started the
ACC: at the same speed, the lower the value of THW,
the lower the level of trust the driver is.
Although it is possible to quantify human-
machine relationships through trust evaluation, it is
difficult to understand the deep information, such as
the driver's distrust of ACC. What is the driver’s real
concern? What is the cause of the conflict between
the driver and ACC? Based on the above questions,
this study uses a in-depth interview method to get a
better understanding of the behaviour and thoughts of
the driver in the cut-in scenario, providing in-depth
analysis of the driver’s behaviour in this experiment.
The in-depth interview is a qualitative research
method. Researchers with specialized access skill to
Understanding Behavioural Conflict between the Drivers and Adaptive Cruise Control (ACC) System in Cut-in Scenario
99

Figure 4: Experimental environment.
to treat a certain condition to the access object, uses the
unstructured method to carry on the personal
conversation type visit, in order to reveal the hidden
secret about the specific behaviour, the motive, the
purpose, the attitude, the feeling report and discovers
its inner connection (Yuan Yue et al., 2006). The
conclusion of this study is based on this method.
The interview outline is designed to focus on the
driver's experience in cut-in scenario when driving
simulator, and interview the driver's subjective feelings
and objective behaviour during the experience. The
subjective experience includes the feeling of response
during the process of cut-in, the time and influence of
the danger consciousness, and the situational
awareness of the ACC human-machine interface.
Objective behaviour refers to the braking response of
the driver in the ACC cut-in scenario.
The selection of the participants mainly considered
the degree of understanding of the ACC system, the
experience of using ACC system, the driving
experience and several factors of age. The study
selected 8 participants, 4 males and 4 females, aged 20
to 30 years old, who had some knowledge of the ACC
system and had a 1-2year driving experience. The
selection of younger users is mainly due to the fact that
the cut-in scenario has high level requirements for the
user's situational awareness and responsiveness. The
younger users can respond faster, so that we can get
more detailed interview data.
The interview is about 30-40 minutes, a week in
length and is visited in the Automotive Media Lab of
Tongji University. During the interview, first, the
participants were introduced to the driving simulator
and the ACC. Then, the main interview purpose was
explained, and the participants were allowed to
practice driving for 10 minutes. Afterward, each
participant was shown a video of the ACC's cut-in
scenario in six different conditions, and during the
experience, the participants were able to turn the
steering wheel or brake based on their perceptions of
the driving scene, and the observers recorded their
behaviour. Finally, after the experience was over. In
the form of access, a semi-structured outline was
adopted, and the participants were able to say how they
felt in the cut-in scenario, and the facilitator pursued
the key questions based on the actions and thoughts of
the interviewees. In order to ensure the authenticity and
correctness of the interview, this study used a recording
pen to record the interview contents, and then collated
the documents and send it to the participants to
confirm.
3 RESULTS
3.1 In-depth Interview Results Analysis
The driver's prediction of the behaviour of the cut-in
vehicle’s driver in the cut-in scenario affects the take-
over behaviour. In all conditions, the driver is always
more likely to choose to brake than to feel the danger.
Of the 8 participants, 5 said that they were still taking
the brake when they were not feeling the danger
because of the predicting driver's behaviour of the side
car during driving. If the side car was too close to the
side lane, the driver might have an idea of the cutting-
in. So when the side car was near the side lane line, the
participants were already alert and ready to brake. In
one typical case, in one of the test scenarios, the car's
speed V = 50km / h, THW = 1.2s, only one of the
participants felt dangerous, but the number of people
taking the brake was 4. The reason for this is that in the
cut-in scenario, the side car continued to drive for 1-2
seconds near the side line before cutting in, which
causes the drivers to take the brake. From this we can
recognize that the driver and ACC are different in their
definition of the cut-in scenario.
Figure 5: Different definitions of driver and ACC for cut-in
scenario.
CHIRA 2019 - 3rd International Conference on Computer-Human Interaction Research and Applications
100
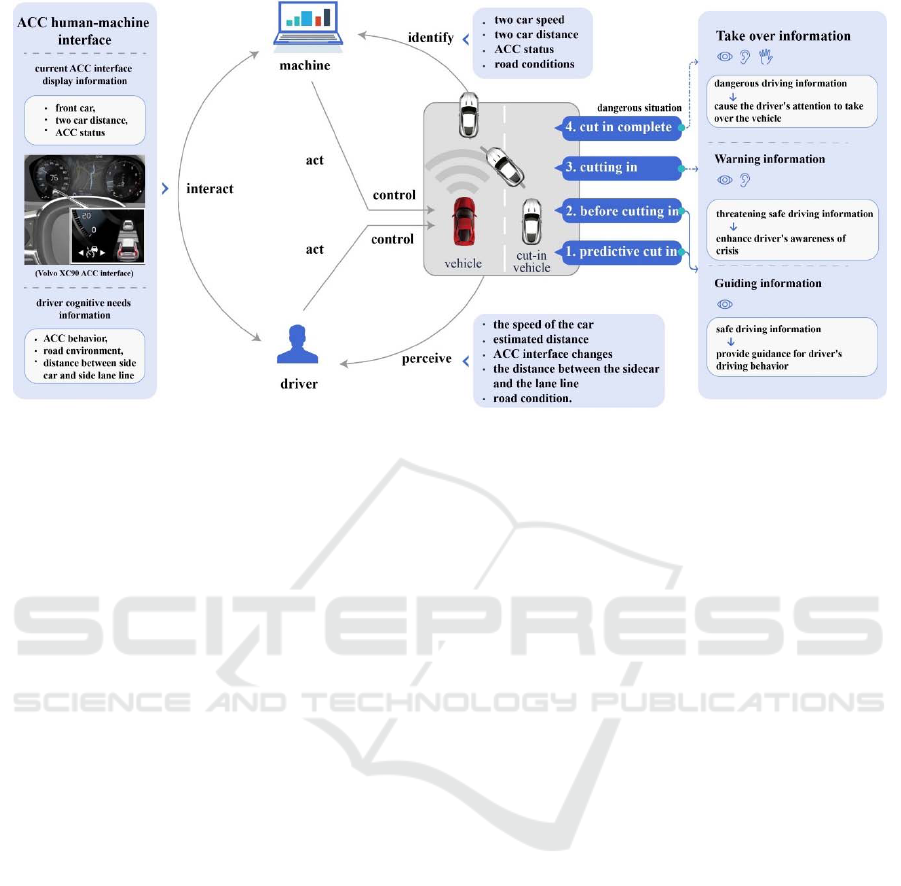
Figure 6: Human-machine interface design strategy in ACC cut-in scenario.
As shown in Fig. 5, for the driver, the cut-in scenario
is more than just the vehicle's cutting-in process, but
also the stage where the pre-sensing side car is about
to cut.
In the cut-in scenario, the driver focuses more on
the actual distance between the two cars ( the actual
distance = V THW ) than the speed or THW.
According to the researcher's observation, when the
THW is constant, the lower the speed (V=30km/h),
the greater the driver feels dangerous and brakes,
which seems to contradict the common sense that we
generally believe that the speed is higher and more
dangerous. For example, in the cut-in scenario, when
THW=1.2s, V=60km/h, the distance between the two
vehicles is 20.00m, 1 participants brake; when
V=50km/h, the distance between the two vehicles is
16.67m, 2 participants brake; and V=30km/h, the
distance between the two vehicles is 10.00m, and 5
people brake. As the two cars get closer and closer,
the more dangerous the driver is feeling. According
to the in-depth interview, two participants said that as
they got closer and closer to the front car, there was a
looming pressure, heightened awareness of the
danger, and therefore braking.
The ACC human-machine interface is less helpful
to the driver in the cut-in scenario. Of the 6
conditions, 4 of them have 2 respondents who thought
that the ACC human-machine interface was helpful,
and the remaining 2 conditions were 3 and 4
respectively. One participants said the reason why the
ACC human-machine interface wasn't helpful was: "
when I (focus) drive, and I can look out for
information. "According to the researcher's further
confirmation, the interviewee's priority in the process
was the external environment in the process of cutting
in. According to the interview, all the participants
said they were in a situation where they felt the
danger, the moment when the side car cut-in, focused
on the environment outside the car and the distance
between the car and the cut-in car. After the side car
cut-in and had been steadily moving, they would pay
attention to the ACC system and understand its status
display.
3.2 Human Machine Interface Design
Strategy
In the cut-in scenario, the performance of the ACC
human-machine interface is not satisfactory to the
driver. The main reason for the conflict is that the
driver is considering are very different from the ACC,
which is mainly reflected in three aspects: the
different definitions of the cut-in scenario, the
different between the perceived risk factors and the
stress, and the perception of the cut-in scenario.
In order to achieve a harmonious human-machine
interaction and reduce the conflict between the driver
and ACC, the ACC human-machine interface should
be designed according to the driver's cognition and
thinking model, as shown in Fig.6.
(1) Firstly, it is important to redefine the cut-in
scenario, to expand the concept of the cut-in process
to four stages: anticipative cut-in, before cut-in,
cutting in, and after cut-in. The predictive behaviour
of the side vehicle’s driver can be judged by the
distance between the side car to the side lane line.
When the side car is closer and closer to the side lane
line, the side driver is considered to have the intention
Understanding Behavioural Conflict between the Drivers and Adaptive Cruise Control (ACC) System in Cut-in Scenario
101

of cutting, and the driver should be informed of the
human-machine interface.
(2) Secondly, in view of the driver's perception of
danger and pressure, the ACC human-machine
interface can be combined with the multi-sensory
channels such as interface display, sound, vibration,
etc. to convey the situational pressure when the
distance between the two cars is reducing. So that
ACC human-machine interface is consistent with the
driver's psychological cognition. In the design study
of Bobbie et al., (2007), changes in size and shape
(trapezoid and triangle) was used to show the
behaviour of the ACC and the danger of the current
driving scenario, so as to consistent with the driver's
perception of the dangerous scene.
(3) Finally, in response to the driver's perception of
the ACC cut-in scenario, the ACC human-machine
interface should not only inform the driver of the
status and behaviour of the ACC, the road condition,
the driving environment, etc (Bobbie et al., 2015). but
also the driver should be warned in advance to help
the drivers deal with unexpected situations.
In the study of Bako (Bako et al., 2006), the
researchers also noted that ACC's early warning of
drivers could help drivers cope with dangerous
scenarios. The early warning should be gradual and
hierarchical. According to the importance of the
information and the degree of impact to safe driving,
it is divided into three levels: the first is the guide
information which about safe driving. This level uses
only the visual perception channel, displays on the
interface, plays the guiding role for the driver's
driving behaviour. In the cut-in scenario, the guidance
information should be displayed in the first two
stages: perception cut-in and before cut-in, giving the
driver an understanding of the current road conditions
and trends.
The second level is the warning information for
the possible threat of safe driving. In order to enhance
the driver's awareness of crisis, using both visual and
auditory channels. In the cut-in scenario, it
corresponds to the cut-in phase. When the cut-in
vehicle threatens to safe driving, a note is sounded,
and the warning interface is displayed on the dash
board, causing the driver to be alert. The third level is
to take over information which may cause a traffic
accident and need an emergency take over. In this
level, three sensing channels are used to attract the
attention of the driver to take over the vehicle: vision,
hearing and touch. In the cut-in scenario, when the
vehicle is cut-in completely and threatens to safe
driving, the user will be prompted to take over the
vehicle by displaying the danger information,
prompting the sound and shaking the steering wheel.
4 CONCLUSION
In order for the driver and ACC to achieve a
harmonious human-machine cooperation and
improve efficiency and safety of driving, we should
clearly recognize the differences and conflicts
between drivers and ACC in the cut-in scenario. The
biggest conflict is that drivers and ACC have different
definitions of the cut-in scenario, the perceptions of
danger and abilities to afford pressure of impending
danger, and the context-aware content and processes
of environmental perceptions. There are two ways to
reduce this divergence. One is to make the ACC
system's sensor performance enhanced, the control
strategy more humane, and have the ability to learn
and record the driver's driving habits and driving
behaviour, making the ACC system more and more
consistent with the driver's expectations. The second
way in which the vehicle and the ACC can detect
information and convey to the driver through the
human-machine interface by using different sensory
channels based on the degree of danger, and allow the
driver to use the strength of ACC to expand his
abilities as much as possible.
At present, the second approach, it seems, is easier
to implement and less costly. The human-machine
interface design, which is designed to reduce the
conflict between the driver and the machine, is crucial
to understanding the conflict between the two. Based
on this purpose, this research obtains first-hand
information through in-depth interviews, analyzes the
behaviour and thoughts of drivers in the cut-in
scenario, and proposes three design strategies for the
cut-in scenario, which has certain practical
significance. However, this study still has limitations.
One of the most important is the inability to fully
respond to all ages, and the behaviours and thoughts
of other drivers in the process of cut-in scenario will
enrich our understanding of this problem.
The method human-machine interface design
proposed in this study is mainly aimed at the ACC
cut-in scenario, which can be used in other driving
scenarios, and even provides some ideas for the
design of intelligent human-machine system to help
drivers better cope with various driving situations and
achieve harmonious human-machine cooperation.
These questions will be further explored in future
studies.
ACKNOWLEDGEMENTS
Thank you to the teachers and students of the Institute
CHIRA 2019 - 3rd International Conference on Computer-Human Interaction Research and Applications
102

of Safety Technology of Tongji University
Automobile Institute for assisting in the safety test of
ACC function.
REFERENCES
Bengler K, Zimmermann M, Bortot D, et al. Interaction
principles for cooperative human-machine systems[J].
it-Information Technology Methoden und innovative
Anwendungen der Informatik und Informationstechnik,
2012, 54(4): 157-164.
Hoc J M. Towards a cognitive approach to human–machine
cooperation in dynamic situations[J]. International
journal of human-computer studies, 2001, 54(4): 509-
540.
Annika F.L. Larsson, Katja Kircher, Jonas Andersson
Hultgren. Learning from experience: Familiarity with
ACC and responding to a cut-in situation in automated
driving. Transportation Research Part F 27 (2014) 229–
237.
Frank Flemisch, Matthias Heesen, Tobias Hesse, Johann
Kelsch, Anna Schieben, Johannes Beller. Towards a
dynamic balance between humans and automation:
authority, ability, responsibility and control in
sharedand cooperative control situations. Cogn Tech
Work (2012) 14:3–18.
Tsang-Wei Lin, Sheue-Ling Hwang, Paul A. Green. Effects
of time-gap settings of adaptive cruise control (ACC)
on driving performance and subjective acceptance in a
bus driving simulator. Safety Science 47 (2009) 620–
625.
Pengjun Zheng, Mike McDonald. Manual vs. adaptive
cruise control – Can driver’s expectation be matched?
Transportation Research Part C 13 (2005) 421–431.
Wouter J. Schakel, Cornelis M. Gorter, Joost C.F. de
Winter, Bart van Arem. Driving Characteristics and
Adaptive Cruise Control – A Naturalistic Driving
Study. IEEE intelligent transportation systems
magazine, summer 2017,17-24.
Bobbie D. Seppelt, John D. Lee. Modeling driver response
to imperfect vehicle control automation. Procedia
Manufacturing 3 (2015) 2621 – 2628.
Brian Tsang-Wei Lin, Sheue-Ling Hwang. Effect
prediction of time-gaps for adaptive cruise control
(ACC) and in-vehicle tasks on bus driver performance.
Safety Science 50 (2012) 68–75.
Pacaux-Lemoine M P, Trentesaux D, Rey G Z, et al.
Designing intelligent manufacturing systems through
Human-Machine Cooperation principles: A human-
centered approach[J]. Computers & Industrial
Engineering, 2017, 111: 581-595.
Solvang B, Sziebig G, Korondi P. Shop-floor architecture
for effective human-machine and inter-machine
interaction[J]. Acta Polytechnica Hungarica, 2012, 9(1):
183-201.
Oborski P. Man-machine interactions in advanced
manufacturing systems[J]. The International Journal of
Advanced Manufacturing Technology, 2004, 23(3-4):
227-232.
Pacaux-Lemoine M P, Trentesaux D, Rey G Z, et al.
Designing intelligent manufacturing systems through
Human-Machine Cooperation principles: A human-
centered approach[J]. Computers & Industrial
Engineering, 2017, 111: 581-595.
Yuan Yue, Fan Wen, Chen Xiao-Li. Deep communication:
How to Make Friends with Strangers. Beijing: China
Machine PRESS,2006.
Bobbie D. Seppelt, John D. Lee. Making adaptive cruise
control (ACC) limits visible. Int. J. Human-Computer
Studies 65 (2007) 192–205.
Bobbie D. Seppelt, John D. Lee. Modeling driver response
to imperfect vehicle control automation. Procedia
Manufacturing 3 (2015) 2621 – 2628.
Bako Rajaonah, Franoise Anceaux, Nicolas Tricot, Marie-
Pierre Pacaux-Lemoine. Trust, cognitive control, and
control: the case of drivers using an Auto-Adaptive
Cruise Control. Proceedings of the 13th Eurpoean
conference on Cognitive ergonomics: trust and control
in complex socio-technical systems. Zurich,
Switzerland, 2006:17-24.
Understanding Behavioural Conflict between the Drivers and Adaptive Cruise Control (ACC) System in Cut-in Scenario
103
