
A Terminal Sliding Mode Control using EMG Signal:
Application to an Exoskeleton- Upper Limb System
Sana Bembli, Nahla Khraief Haddad and Safya Belghith
RISC Laboratory, National Engineering School of Tunis, University of Tunis El-Manar, Tunis, Tunisia
Keywords: Exoskeleton- Upper Limb System, Terminal Sliding Mode, EMG Signal, Robustness Analysis, Monte Carlo
Simulation, Uncertainties.
Abstract: This paper presents a robust terminal sliding mode control using the EMG signal. The application deals with
an exoskeleton- upper limb system, used for rehabilitation. The considered system is a robot with one
degree of freedom controlling the flexion/ extension movement of the elbow. The different stages of the
EMG signal extraction were presented. Then, a second order terminal sliding mode algorithm has been
developed to control the exoskeleton- upper limb system. A Stability study is realized and a robustness
analysis is done using Monte Carlo simulation in presence of parametric uncertainties. Simulation results
are provided to prove performance and effectiveness of the second order terminal sliding mode algorithm
when tracking the EMG signal extracted from the human arm.
1 INTRODUCTION
Muscle signals are biomedical signals that measure
the electrical currents generated in muscles when
they contract and represent their neuromuscular
activities. These acquired muscle signals require
state-of-the-art methods for detection,
decomposition, and processing to control a
mechanical system (Teena et al., 2011), (Satoshi et
al., 2001).
Electromyography is a technique used to capture
signals produced by the nerves in the target muscles.
The field of electromyography is studied in
biomedical engineering. The instrument from which
the EMG signal is obtained is known as
electromyography and the resulting record is known
as electromyogram.
The electrical signal produced during muscle
activation, known as the myoelectric signal, is
produced from small electrical currents generated by
ion exchange across muscle membranes and
detected with the aid of electrodes.
EMG signal is present in different areas of
applications (Reaz, et al., 2006). It is used clinically
for the diagnosis of neurological, neuromuscular
disorders and for biofeedback diagnosis or
ergonomic assessment by laboratories and clinicians.
EMG is also used in many types of research
laboratories, including those involved in
biomechanics, neuromuscular physiology,
movement disorders, postural control (Christian et
al., 2006), and physiotherapy.
In this context, we will use this signal to control
an exoskeleton system.
Exoskeleton is defined as a mechatronic system
placed on the user’s arm and acts as amplifier that
augments, reinforces or restores human
performances (Sana et al., 2017), (Sana et al., 2018).
The objective of controlling an exoskeleton is to
follow the movements of a healthy human, to
increase his physical abilities for specific tasks in a
relatively safe and transparent manner. To achieve
this, it is necessary to apply a suitable controller.
The complexity of the exoskeleton-upper limb
dynamic system has led researchers to develop
different control laws.
In the literature and referring to (Frank et al.,
2017), a sliding mode was used to control the
exoskeleton of the upper limbs. A mixed force and
position controller which mixes, for the same degree
of freedom, the force and position information is
used by the author in (Nathanael, 2011). Pre-
calculated torque control (using the PID corrector) is
a simple nonlinear control method and is often used
for the control of exoskeletons developed by the
authors in (Sana et al., 2018), (Thierry, 2012).
Robotic systems, in general, suffer from two
main components of uncertainties. The first is that of
Bembli, S., Haddad, N. and Belghith, S.
A Terminal Sliding Mode Control using EMG Signal: Application to an Exoskeleton-Upper Limb System.
DOI: 10.5220/0008071905590565
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 559-565
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
559

parameter variations. The second major source of
uncertainty is the external interaction forces on the
suspended body, which are generally unknown. So,
robustness analysis becomes important for such
systems.
The different developed controllers used in
literature are obtained at the cost of certain
disadvantages like the performance when tracking
the desired trajectories and the robustness in
presence of uncertainties and disturbances.
The contribution of this paper is to control an
exoskeleton- upper limb system using a terminal
sliding mode algorithm and the EMG signal as
desired trajectories. In presence of parametric
uncertainties and to study the robustness as well as
the performance of the proposed controller, a Monte
Carlo simulation was used.
The paper is organized as follows: section 2,
deals with the different stages of EMG signal
extraction. Section 3 describes the modeling of the
exoskeleton- upper limb system, the control and the
stability study using the terminal sliding mode as
well as the robustness analysis using Monte Carlo
simulation. In section 4, simulation results and
discussions are given. Finally, section 5 is reserved
for the conclusion and future work.
2 EMG SIGNAL EXTRACTION
As a control signal, the EMG muscle signal is sensitive
to electrical noise since it is at the mV scale. This
produces interference during the measurements, for this
reason it must be highly transformed.
The muscle signal is acquired and amplified in a
first stage and then filtered in a second stage in order
to remove the DC component, it will be sent to a
third stage where the high frequency noise will be
eliminated (Reaz et al., 2006).
The extraction of the EMG muscular signal is
done through three stages (Abolfazl and Pourmin,
2016). These different stages (Fig. 1) are:
- Acquisition and differential amplification of the
muscular signal: The EMG signal is acquired
thanks to the differential amplification technique.
The differential amplifier must have a high input
impedance and a very low output impedance.
Ideally, the differential amplifier has infinite
input and zero output impedance.
Indeed, the differential amplification is obtained
using an instrumentation amplifier. The latter
performs the differential amplification by
subtracting the voltages V1 and V2. In this way,
the noise signal which is common to V1 and V2
(potentials collected by the input electrodes) for
example the disturbance of the supply line will
be eliminated.
- Remove the DC component: an active high-pass
first order filter will be used to get rid of any DC
offset. The use of the active component can
isolate the filtering from the rest of the circuit.
We need a high-pass filter to remove low
frequencies. In fact, the cutoff frequency of the
filter is the frequency below which all
frequencies are eliminated. All frequencies above
this value are reported.
- High Frequency Noise Suppression: This stage
uses a low pass filter to smooth our signal and
remove high frequency noise. In this floor we
will use a low-pass filter. The concept of low-
pass filters is quite opposite to that of high-pass
filters. In these filters, only the frequencies that
are lower than the cutoff frequency are
transmitted.
G
1
and G
2
presented respectively the amplification
gain of the first and the second stages.
The EMG signal (Fig.2) was recorded during flexion
movement of the elbow.
This signal will be used in the next
section as a desired trajectory to control
the elbow articulation of the exoskeleton- upper limb
system.
3 EXOSKELETON- UPPER LIMB
SYSTEM CONTROL
In this section, we aim to control the exoskeleton-
upper limb system by the terminal sliding mode in
order to track the desired trajectories defined by the
EMG signal extracted from the human arm during
the flexion movement of the elbow joint.
The considered system is presented by figure 3.
The modeled system is a robot with two degrees of
freedom (controlling the shoulder and the elbow). We
will be interested only in the articulation of the elbow.
So the other articulation will be fixed in the next part.
Based on Euler Lagrange equation, the dynamic
model of the system having two degrees of freedom
(DoF) given by Fig.1 in the presence of friction can
be expressed using the following second-order
nonlinear differential equation:
M(q)
+ C(q,
)
+G(q)+F(q,
) = τ
exo
+ τ
arm
+τ
ex
(1)
Where:
F (q, q) = f
v
q + k
i
sign (q
i
)
(2)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
560
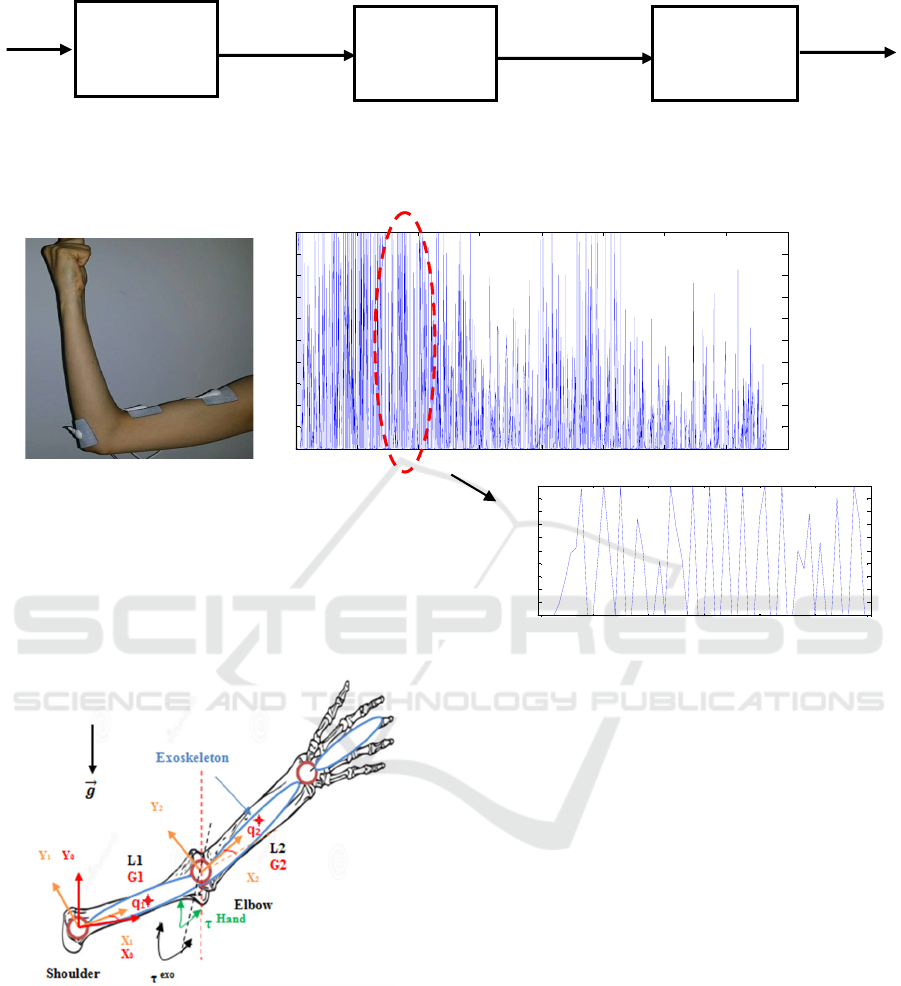
Figure 1: Different stages of the muscular signal extraction.
Figure 2: EMG signal obtained for a contraction movement of the elbow.
Figure 3: General configuration of a 2 DoF exoskeleton.
With:
- q ∈
2
is the vector of joint positions;
- q ∈
2
is the vector of joint velocities;
- q∈
2
is the vector of joint accelerations;
- M(q)∈
2x 2
is the inertia matrix;
- C(q,q)∈
2x2
is the Coriolis matrix;
- G(q) ∈
2
is the gravitational vector;
- F(q,q) ∈
2
is the force generated by friction;
- τ
exo
∈
2
is the control vector applied by
exoskeleton;
- τ
arm
∈
2
is the torque applied by the human;
- τ
ext
∈
2
is the external torque.
a. A Terminal Sliding Mode Control.
Instead of using a linear sliding surface, the
Terminal Sliding Mode Control (TSMC) with a
nonlinear sliding surface has been proposed
(Behnamgol and Vali, 2015), (Chaoxu and Haibo,
2018), (Yuqiang et al., 1998).The terminal sliding
mode was developed by adding the nonlinear
fractional power element to the sliding phase to
provide some superior properties, such as finite state
convergence of state variables, faster and better
tracking accuracy.
A nonlinear sliding variable in TSMC can also
improve static performances.
Terminal Sliding mode control adds non-linear
functions to the design of the sliding top plane
(Yong and Zhihong, 2002). Thus, a terminal sliding
surface is constructed and tracking errors on the
sliding surface converge to zero in a finite time.
For the terminal sliding mode control, the sliding
surface is defined by:
S
t
=x
2
+
λ
x
1
q/p
(3)
EMG V
out1
= (V
2
-V
1
)*G
1
V
out2
= (V
out1
-DC)*G
2
EMG
signal
E
lectrodes filtered and
amplified
Signal acquisition stage Signal conditioning stage Second amplification
And first am
p
lification sta
g
e
0 200 400 600 800 1000 1200 1400 1600
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0 10 20 30 40 50 60
0
0
.5
1
1.5
2
2
.5
3
3
.5
4
4
.5
5
Acquisition and
differential
amplification
Removal of the
continuous
component
High frequency
noise
suppression
A Terminal Sliding Mode Control using EMG Signal: Application to an Exoskeleton-Upper Limb System
561

With: λ > 0 ; q and p > 0 ; 0< q< p.
We consider the following system:
1
= x
2
2
= f(x) + g(x) u
We have:
2
= f(x) + g(x) u u = - g
–1
[f(x) -
2
]
(4)
For S
t
= 0, we get:
x
2
=‐λx
1
q/p
(5)
2
= -λ
x
1
q/p-1
1
=
-λ
x
1
q/p-1
2
(6)
We have:
u = - g
–1
[f(x) -
2
]
(7)
u = - g
–1
[f(x) + λ
x
1
q/p-1
2
]
(8)
u
t
= - g
–1
[f(x) +λ
x
1
q/p-1
2
+ k sign(S
t
)]
(9)
b. Stability Proof.
Consider the Lyapunov candidate function:
V=
S
t
2
(10)
V
= S
t
S
t
(11)
We calculate S
t :
S
t = x2 + λ
x1 (q/p)-1x2
(12)
S
t
= f(x) + g(x) u + λ
x
1
(q/p)-1
x
2
(13)
With:
g(x u = x
2
– f(x) = - λ
x
1
(q/p)-1
x
2
–f(x) – k
sign(S
t)
(14)
So:
S
t
= f(x) - λ
x
1
q/p-1
x
2
–f(x) + λ
x
1
(q/p)-1
x
2
– k sign (S
t
)
(15)
S
t
= – k sign (S
t
)
(16)
We get:
V
= S
t
S
t
= – S
t
k sign (S
t
) < 0
(17)
As:
- The term -kS
t
sign (S
t
) is negative because: k ≥
0 and since the sign function is constant in
pieces so S
t,
sign (S
t
) = +1, ∀S
t
.
Then V
is semi-definite negative.
Like V ≥ 0 and V
≤ 0, the system is asymptotically
stable.
Applying this command to our system, we obtain:
u
t
= - g
–1
[f(x) +λ
x
1
(q/p)-1
x
2
+ k sign(S
t
)]
(18)
The system is presented by:
q
= f(q, q) + g(q , q) u
(19)
With:
- f(q, q)= - M
-1
(q , q) (C(q , q) q + G(q))
- g(q , q)= M
-1
(q , q)
We get:
u
t
= C(q q
) q
+ G(q) - M
-1
[λ
(q
d
- q
(q/p)-1
q
d
+ k sign(S
t
)]
(20)
c. Robustness Analysis.
To study the performance and the robustness of the
proposed controller face to parametric uncertainties,
we used the Monte Carlo method which is a
probabilistic technique based on the use of a large
number of random disturbances.
The Monte Carlo method (Gersende, 2009)
refers
to any calculation technique that involves successive
resolutions of a deterministic system incorporating
uncertain parameters modeled by random variables
(Laura and Robert, 1993). It is a powerful and very
general mathematical tool which has earned it a wide
range of applications.
To conduct a Monte Carlo simulation, it is
necessary to identify the type of distribution of the
uncertainties applied to the input system.
In this case, an uniform random distribution is
applied to the system which will have the following
form in presence of parametric uncertainties:
q
= (f (q, q, t) + ∆
f
) + (g (q) + ∆
g
) u(t)
(21)
4 SIMULATION AND RESULTS
Simulation results are provided to prove the
efficiency of the proposed controller law.
In a first time, the EMG signal extraction of the
elbow flexion movement is done from a healthy
person. Then this signal was used as a desired
trajectory.
The measured and the desired trajectories of the
released tests as well as the tracking errors
trajectories are given in Figs. 4 and 5.
Figs. 6 and 7 present the velocities tracking and
errors of the tested algorithm.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
562

From these figures, we can clearly note that
using the second order terminal sliding mode
controller, we get a good position as well as
velocity tracking of the desired trajectories defined
by the EMG signal in presence of parametric
uncertainties.
In order to prove the robustness and the
performance of the tested controller, we applied
some disturbances and we calculate the Root-Mean-
Square (RMS), the mean (Mean) and the standard
deviation (Std).
The RMS is calculated using the following
expression:
q
RMS
=
∑
|q
n|
2
(22)
The Std can be expressed by:
Σ
q
=
EqE
q
2
] =
Eq
Eq
2
(23)
And the sample mean is defined as:
q
=
∑
q
i
(24)
Figure 4: Simulation results of the desired EMG signal and the measured signal during the flexion movement of the elbow
in position.
Figure 5: Measured error simulation when the tracking desired trajectories in position.
200 300 400 500 600 700 800 900 1000
0
1
2
3
4
5
390 400 410 420 430 440 450 460 470
0
1
2
3
4
5
0 200 400 600 800 1000 1200 1400 1600
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
error
340 360 380 400 420 440 460 480 500 520
-0.2
-0.1
0
0.1
error
:Desired EMG
: Measured signal
A Terminal Sliding Mode Control using EMG Signal: Application to an Exoskeleton-Upper Limb System
563
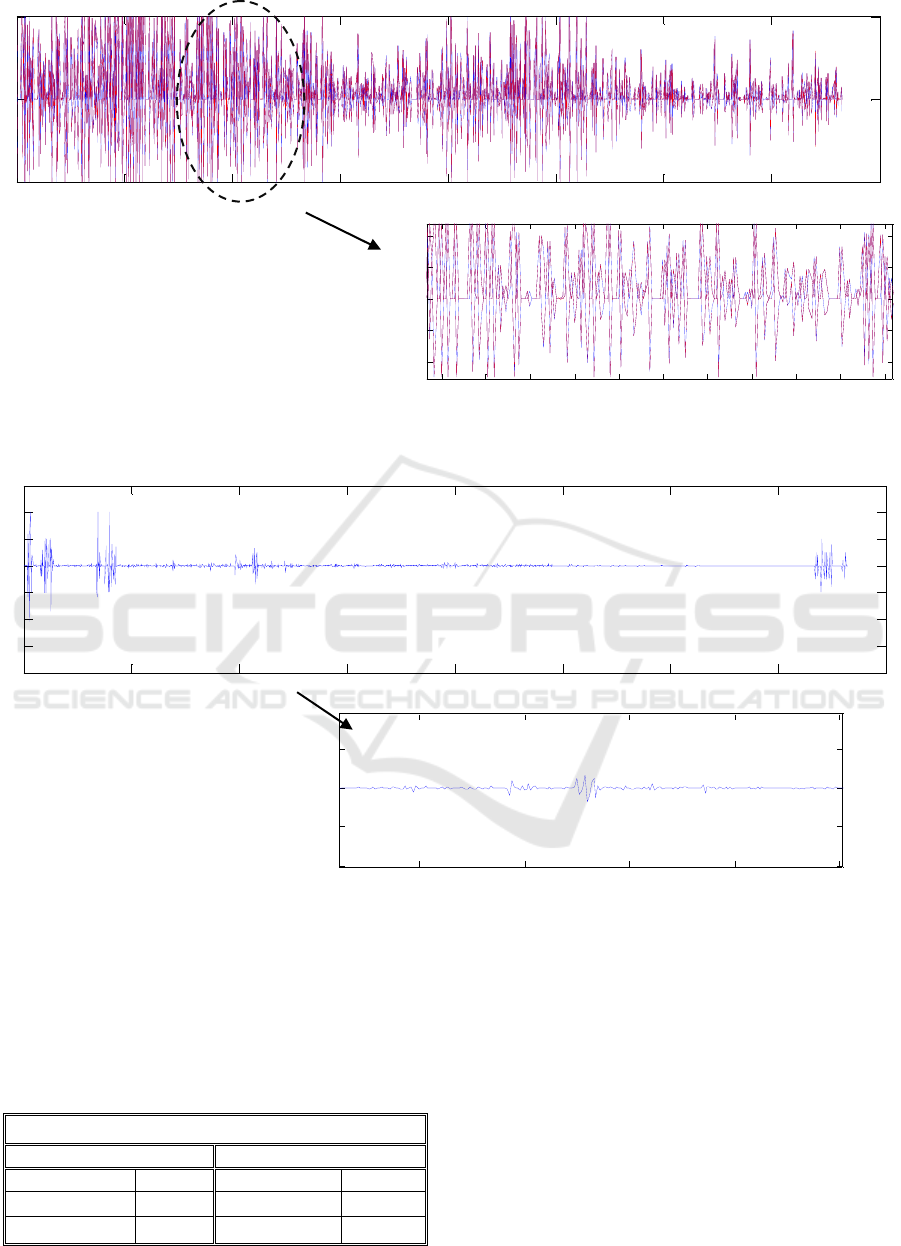
Figure 6: Simulation results of the desired EMG signal and the measured signal during the flexion movement of the elbow
in velocity.
Figure 7: Measured error simulation when the tracking desired trajectories in velocity.
The uncertainties applied to the exoskeleton-
upper limb system are uniform random distributions
with ∆
f
and ∆
g
∈ [0; 0.005] at t= 0.2s.
Table 1: Calculation of RMS, Mean and Std of the elbow
joint of the exoskeleton- upper limb system during the
elbow flexion movement.
Terminal Sliding Mode Control
Position simulation Velocity simulation
RMS [rad]
0.0043
RMS [rad/s]
0.0037
Mean [rad]
0.0037
Mean [rad/s]
0.0028
Std [rad]
0.0021
Std [rad/s]
0.0012
The results (Table.I) are given when controlling
the exoskeleton-upper limb system in the presence of
parametric uncertainties.
We can clearly see from this table that the
proposed algorithm gave a good tracking of the
desired trajectories (RMS in order of 10
-3
).
5 CONCLUSION
This paper deals with the control, the stability study
and the robustness analysis of an exoskeleton-upper
limb system, used for rehabilitation, in presence of
0 200 400 600 800 1000 1200 1400 1600
-5
0
5
340 360 380 400 420 440 460 480 500 520 540
-4
-2
0
2
4
0 200 400 600 800 1000 1200 1400 1600
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
350 400 450 500 550
-0.4
-0.2
0
0.2
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
564

uncertainties using the EMG signal. The different
stages of the EMG signal extraction were presented.
Then, a terminal sliding mode algorithm is used to
control the system. A robustness study using Monte
Carlo simulation was done to analyse the
performance of the exoskeleton in presence of
parametric uncertainties. Simulation results are
provided to prove the performance and the
robustness of the proposed algorithm when tracking
the desired trajectories. As a future work,
experimental results will be given when the
exoskeleton is worn by the human upper limb.
REFERENCES
Abolfazl, Sh. and Pourmina, M. A., 2016, Study and
Analysis of EMG Signal and its Application in
Controlling the Movement of a Prosthetic Limb.
Christian, Fl., et al., 2006, Application of EMG Signals for
Controlling Exoskeleton Robots, Biomed Tech.
Frank, B., et al., 2017, Enhancing Feedforward Controller
Tuning via Instrumental Variables: with Application to
Nanopositioning.
Nathanael, J., 2011, Contributions à l'exploitation
d'exosquelettes actifs pour la rééducation
neuromatrice, pp. 17- 26.
Thierry, K.O., 2012, Commande d’un bras exosquelette
robotique à sept degrés de liberté, Montréal, pp 1-5.
Teena, G., et al., 2011, Sensing, Processing and
Application of EMG signals for HAL (Hybrid
Assistive Limb), Second International Conference on
Sustainable Energy and Intelligent System (SEISCON
2011), India.
Satoshi, Mo., et al., 2001, Estimation of Forearm
Movement from EMG Signal and Application to
Prosthetic hand Control, International Conference on
Robotics 8 Automation, Seoul, Korea.
Reaz, M. B. I, et al., 2006, Techniques of EMG Signal
Analysis: Detection, Processing, Classification and
Applications.
Laura, R. R., and Robert, F.St, 1993, A Monte Carlo
Approach to the Analysis of Control System
Robustness, Automatica, Vol. 29, No. 1, pp. 229-236.
Gersende, F., 2009, Méthodes de Monte Carlo Et Chaînes
de Markov pour la simulation , Mémoire présenté pour
l’obtention de l’Habilitation à Diriger les Recherches.
F. Adelhedi, A. Jribi, Y. Bouteraa and N. Derbel, 2015,
Adaptive Sliding Mode Control Design of a SCARA
Robot Manipulator System Under Parametric
Variations, University of Sfax, Sfax Engineering
School, Control and Energy Management Laboratory
(CEM-Lab), Tunisia.
Znidi, A., et al., 2014, Adaptive sliding mode control for
discrete uncertain systems using matrix RLS
algorithm, Sciences and Techniques of Automatic
Control and Computer Engineering (STA), 15th
International Conference on Sciences and Techniques
of Automatic Control and Computer Engineering
(STA).
Sana, B. et al., 2017, Robustness analysis of an upper limb
exoskeleton controlled by sliding mode algorithm, The
1st International Congress for the Advancement of
Mechanism, Machine, Robotics and Mechatronics
Sciences (ICAMMRMS-2017), Beirut LEBANON.
Sana, B. et al., 2017, Robustness analysis of an upper-limb
exoskeleton controlled by an adaptive sliding mode.
The 5th International Conference on Control
Engineering &Information Technology (CEIT-2017),
Sousse – Tunisia.
Sana, B. et al., 2018, Robustness analysis of an upper-limb
exoskeleton using Monte Carlo simulation, The 2nd
International Conference on Advanced Systems and
Electrical Technologies (IC_ASET), Hammamet,
Tunisia.
Sana, B. et al., 2018, Adaptive sliding mode control with
gravity compensation: Application to an upper-limb
exoskeleton system, The Fifth International
Francophone Congress of Advanced Mechanics
(IFCAM 2018), Faculty of Engineering - Lebanese
University, Lebanon.
Behnamgol. V. and Vali, A. R., 2015, Terminal Sliding
Mode Control for Nonlinear Systems with Both
Matched and Unmatched Uncertainties, Iranian
Journal of Electrical & Electronic Engineering, Vol.
11, No. 2.
Chaoxu, Mu. and Haibo, He., 2018, Dynamic Behavior of
Terminal Sliding Mode Control, IEEE Transactions
On Industrial Electronics, Vol. 65, NO. 4.
Yuqiang, W. et al., 1998, Terminal sliding mode control
design for uncertain dynamic systems, Systems &
Control Letters 281–287.
Yong, F.X.Yu and Zhihong, M., 2002, Non-singular
terminal sliding mode control of rigid manipulators,
Automatica 38, 2159–2167.
A Terminal Sliding Mode Control using EMG Signal: Application to an Exoskeleton-Upper Limb System
565
