
A Method for Health Detection in Eureka Based on Load Forecasting
Chao Deng
1
, Xinming Tan
1
and Lang Li
1
1
School of Computer Science &Technology, Wuhan University of Technology
Wuhan, Hubei
Keywords: Microservice, Health detection, Time series, Load forecasting.
Abstract: Health detection relies on the heartbeat mechanism in Eureka. The heartbeat mechanism analyzes the status
of service by periodically detecting the running status of the service node. But it doesn't care whether the
service runs successfully, therefore reducing the success rate of service calls. In order to solve the problem,
this paper proposes a new method for load forecasting based on time series. The value of load forecasting is
used to measure the health of the service node quantitatively, and the number of available instances is
effectively reduced during load balancing and the load balancing efficiency was improved.
1 INTRODUCTION
With the rapid development of computer network, the
drawbacks of the traditional application architecture
become more and more obvious, which seriously
restrict the rapid innovation and agile delivery of the
business (Zheng Mingzhao et al. 2017). The
microservice architecture was proposed to solve the
problems in traditional application architectures
(Lewis et al. 2014).
Spring Cloud is an open source microservice
development tool based on Spring Boot. Spring
Cloud Eureka module has been used for service
governance, and providing services such as health
detection. At present, the health detection in Spring
Cloud Eureka relies on the heartbeat mechanism
(Smaoui et al. 2017). The mechanism gets the running
status of service by periodically detecting the running
status of the service node, regardless of whether the
service can run successfully. This approach will have
resulted in some failed service calls, which will
reduce the success rate of service calls. In order to
solve the above problem, a health detection method
based on load forecasting for quantitative analysis of
service health has been proposed. In this method,
while monitoring the performance indicators, the
health of the service node is measured quantitatively
by the load forecasting value.
Load balancing technology is the focus of
research in distributed architecture. The research
direction mainly focuses on the load balancing
algorithm, which is divided into static load balancing
algorithm and dynamic load balancing algorithm.
Static load balancing algorithm does not consider the
actual load status of the server generally. Although
the implementation of static load balancing algorithm
is simple, the effect is not good mostly. Dynamic load
balancing algorithm requires that service load
information can be sent in smaller time intervals, even
in real time, which results in significant consumption
of server resources. Therefore, some people proposed
some load forecasting algorithms. Li Qinghua and
Guo Zhixin (2002) proposed a BP forecasting
algorithm based on artificial neural network. Xu
Jianfeng f et al. (2000) proposed a forecasting
algorithm based on filtering theory. Meng Limin and
Xu Yang (2016) proposed a load forecasting
algorithm based on dynamic index. Wolski et al.
(2000) proposed a forecasting algorithm based on
CPU utilization in UNIX system. Yuan Gang (2015)
proposed a load forecasting algorithm based on
service classification. Yang Wei et al. (2006)
proposed a load forecasting algorithm based on time
series and so on.
The algorithms proposed in [4-6] are relatively
complicated. The algorithms did not consider the
resource consumption of the load forecasting, which
will have affected the execution efficiency of the
service node. The algorithms proposed in [7-8]
calculated the current load value of the service
quantitatively, and calculated the load forecasting
value comprehensively by monitoring the number of
service requests, without considering the relationship
between the load values at different time (Dinda
Deng, C., Tan, X. and Li, L.
A Method for Health Detection in Eureka Based on Load Forecasting.
DOI: 10.5220/0008098902270232
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 227-232
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
227

1998). Therefore the accuracy of the prediction could
not be guaranteed. The algorithm proposed by Yang
Wei et al. (2006) was based on the time series of the
load, but it did not provide a detailed measure of the
load value. Based on the above considerations, this
paper proposes a load forecasting method based on
the time series of the load, and considers the
dependence of different service nodes on host
resources, and gives a quantitative measure of load
value.
In summary, this paper proposes an improvement
measure for Eureka's health detection. It provides
more data support for system load balancing by
distinguishing between normal service and fault
service by running monitoring and load forecasting of
service node.
2 LOAD FORECASTING MODEL
2.1 The Calculation of Load
The load is a reflection of the current performance of
the server. In order to make full use of the resources
of all service nodes and improve resource utilization
and system execution efficiency, the performance
status of the server must be accurately measured.
Indicators such as CPU utilization, memory
utilization, disk I/O utilization, network bandwidth
utilization, and the count of server processes usually
affect the load on the server. Yang Mingji et al. (2016)
proposed a load calculation method based on CPU
utilization and memory utilization. The calculation of
the load in the method was not sufficient for the
utilization of performance indicators. This paper
proposes a load calculation method that
comprehensively considers CPU utilization, memory
utilization, disk I/O utilization, and network
bandwidth utilization.
The load on the server is highly correlated with its
own hardware utilization. These factors have
different effects on server performance. The
following two aspects should be noted when selecting
hardware load indicators:
(1) The indicator should be collected
conveniently, and the collection process is basically
non-intrusive to the load balancing process.
(2) Appropriate indicator is selected under
conditions of high accuracy and low computational
overhead.
The load of a service node usually includes two
aspects: hardware resource utilization and the number
of the service consumer. Hardware resources
determine the ability of a service node to process
service requests. The more threads in the service node,
the more resources are consumed. Therefore, the
change in hardware resource utilization can
intuitively reflect the actual load of the service node.
In summary, this paper selects CPU utilization,
memory utilization, I/O occupancy rate and network
bandwidth utilization to calculate the comprehensive
load of the server. These indicators can reflect the
actual load of the service load.
The calculation formula is shown in Equation 1.
100*)
4321
NkIkMkCkX (
(1)
Where X is the integrated load, C is the CPU
utilization, M is the memory utilization, I is the I/O
utilization, N is the network bandwidth utilization, k
i
is a coefficient, and the magnitude of k
i
represents the
degree of importance of the four indicators, and their
values satisfy the Equation 2.
1 2 3 4
+ + + =1k k k k
(2)
Different service nodes provide different services,
so the service nodes have different degrees of
dependence on various indicators. We assign
different values to different service nodes
dynamically.
2.2 Time Series Model
It can be seen from the characteristics of the load that
the load is a time series, and the load value shows a
strong correlation with time, so this paper proposes a
load forecasting algorithm based on the time series
model.
The theory of time series summarizes a number of
time series models describing stochastic processes.
Common models are AutoRegressive model (AR
model), Moving Average model (MA model), and
AutoRegressive Moving Average models (ARMA
model).
Generally, which model should be selected for
fitting needs to be distinguished according to the
tailing or truncation characteristics of the
autocorrelation coefficient and partial autocorrelation
coefficient of the time series.
If the autocorrelation coefficient is tailing and the
partial autocorrelation coefficient is truncation, the
AR model is suitable. If the autocorrelation
coefficient is truncation and the partial
autocorrelation coefficient is tailing, the MA model is
suitable. If the autocorrelation coefficient and the
partial autocorrelation coefficient are tailing, the
ARMA model is suitable.
Through the collection of multiple sets of data,
this paper finds that the time series of load obtained
through calculations all fluctuate randomly within a
certain range, and the series presents a certain degree
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
228

of stability. And the autocorrelation coefficient is
tailing, the partial autocorrelation coefficient is
truncation in most series. Therefore, the AR model is
used in this paper.
The AR model describes a simple autoregressive
stochastic process whose mathematical
representation is shown in Equation 3.
=a +a +a + +a
t 0 1 t-1 2 t-2 p t p t
x x x x
(3)
Where a
i
is a parameter,
{}
t
is white noise. The
time series value
t
x
can be expressed by the sequence
value of the previous p moments and the current noise.
The p order autoregressive model, abbreviated as
AR(p) model, is an AR model that predicts the next
sequence value based on the sequence values of the
previous p moments.
a = (a ,a , ,a )
T
0 1 p
is the
autoregressive coefficient in the AR(p) model, and
{}
t
obeys the distribution
2
(0, )N
.
For a time series
{}
t
x
, the modelling process of
the AR model is shown in Figure 1.
Figure 1: The modelling process of AR model.
2.3 Test for Stationary
If the mean of a time series is constant and the
variance does not exhibit a time-varying
characteristic, then it can be called a stationary
sequence. The autocorrelation coefficient and partial
autocorrelation coefficient of the stationary sequence
exhibit tailing or truncation characteristics. Therefore,
the stationarity test can be performed by the
autocorrelation coefficient and the partial
autocorrelation coefficient of the sequence. The
mathematical representation of the P-order
autocorrelation coefficient is shown in Equation 4.
2
1
( )( )
np
i i p
p
i
x u x u
(4)
Where u has the meaning shown in Equation 5,
and
2
has the meaning shown in Equation 6.
If the autocorrelation coefficient and partial
autocorrelation coefficient of sequence exhibit tailing
or truncation characteristics as the order increases,
then the sequence is a stationary sequence.
2.4 Parameter Estimation
The parameter estimation in the AR model is usually
the least square estimation.
For the load sequence
{}
t
x
, if its mean is not zero,
the sequence should be converted to a zero-sequence
{ | }
t t t
w w x u
.
For a time series
{}
t
w
, when
1ip
, the
estimation of
i
is represented by
ˆ
i
which has the
meaning shown in Equation 7.
ˆ ˆ ˆ ˆ
-(a +a + +a )
i i 1 i-1 2 i-2 p i p
w w w w
(7)
Where
ˆ
i
is residual. The goal of parameter
estimation is to minimize the sum of squared
residuals. We define a in Equation 8, define W in
Equation 9, and define Y in Equation 10.
1
2
a
a
a
a
p
(8)
11
12
12
=
pp
pp
n n n p
w w w
w w w
W
w w w
(9)
1
2
=
p
p
n
w
w
Y
w
(10)
Then the sum of squared residuals can be
expressed as Equation 11.
(a) ( a) ( a)
T
F Y W Y W
(11)
In the Equation 11, we obtain the derivation of
parameter a and then let the derivation equals 0. The
parameter a in Equation 12 is obtained. The parameter
estimation of the model was obtained.
1
a ( )
TT
W W W Y
(12)
2.5 Tests for Forecasting Model
After the model is fitted, it is necessary to test the
validity of the model to determine whether the fitting
model is sufficient to extract the information in the
sequence. A good fit model should be able to extract
almost all of the sample-related information in the
1
1
n
i
i
ux
n
(5)
22
1
1
= ( )
n
i
i
xu
n
(6)
Model
identification
Model
identification
Parameter
estimator
Parameter
estimator
Sequence
Sequence
Smoothing
Smoothing
Sequence
prediction
Sequence
prediction
End
End
White noise
test
White noise
test
Model
checking
Model
checking
Stationarity
test
Stationarity
test
Y
Y
Y
N
N
N
A Method for Health Detection in Eureka Based on Load Forecasting
229

sequence values. This paper proposes a method to test
the validity of the fitted model.
If
ˆ
{}
i
is white noise, the autocorrelation
coefficients of all its orders are theoretically zero.
Considering the deviation of the data, most
autocorrelation coefficients should be in the vicinity
of zero. This means that the model takes into account
relevant information for almost all samples.
Therefore, the validity of the model can be confirmed
by a white noise test of the
ˆ
{}
i
.
3 IMPLEMENT
Health detection is part of service governance in
Eureka. Service governance in Eureka includes three
core elements: service registry, service provider, and
service consumer. The entire calling process of the
service is shown in Figure 2.
Service provider 1
Service provider 1
Service provider N
Service provider N
Instances list
Instances list
Service consumer
Service consumer
Is the heartbeat
signal times out?
Is the heartbeat
signal times out?
Eureka Server
Eureka Server
register
register
register
register
register
register
Y
Y
N
N
Service eviction
Service eviction
Service renew
Service renew
.
.
.
.
.
.
service call
service call
obtain
instances
obtain
instances
heartbeat
signal
heartbeat
signal
heartbeat
signal
heartbeat
signal
Figure 2: The calling process of service in Eureka.
In Eureka, the registration center does not care
about the status of the service, but only records the
status of the service. In the heartbeat mechanism, as
long as the program is running, it is judged that the
service is healthy and available by default, which is
obviously not accurate enough. This paper proposes
an improved scheme based on the load forecasting
model. The entire calling process of the service is
shown in Figure 3.
Service
provider 1
Service
provider 1
Service
provider N
Service
provider N
Instances list
Instances list
Service consumer
Service consumer
Eureka Server
Eureka Server
register
register
register
register
register
register
service call
service call
obtain
instances
obtain
instances
Monitoring
component
Monitoring
component
Actuator
Actuator
monitoring
load
monitoring
load
service
renew
service
renew
Is the heartbeat
signal times out?
Is the heartbeat
signal times out?
Y
Y
N
N
service eviction
service eviction
service renew
service renew
Figure 3: The improved calling process of service in the
Eureka.
The load forecasting model works in the
monitoring component, and the workflow is as the
following:
The service provider registers the service
instance in the service registry;
The service provider starts the spring-boot-
actuator module and uses the Sigar monitoring
component to periodically obtain service
performance indicators;
Calculate the load value by the load value
calculation method, and save it in the Map;
Input the load sequence in the Map to the load
forecasting model, a load forecasting value of
the service instance will be outputted;
The service registry accesses the /health
endpoint of the spring-boot-actuator module
periodically;
The /health endpoint obtains the load
forecasting value of the service instance, and
returns the service running status according to
the monitoring result of the service, and
updates the load value of the service instance in
the registration center;
The service consumer obtains a list of service
instances, and completes instance selection and
invocation according to the load forecasting
value combined with the load balancing policy.
4 EXPERIMENTAL RESULTS
In order to verify the validity and feasibility of the
forecasting model, we carry out the following
experiments.
The parameter p of the time series model is larger,
the prediction cost is higher. In order to reduce the
complexity of the experimental evaluation, we choose
5, 10, 15 as the candidate parameters. The time
interval of the sequence value will have a certain
impact on the forecasting model. We choose 1s, 5s,
10s, 20s as the candidate parameters, and use the two
indicators in Equation 13 and Equation 14 to predict
and evaluate different parameters.
22
1
1
= ( )
N
t
t
err err
N
(13)
1
||
1
=
N
t
t
t
err
Nx
(14)
The meanings of
t
err
and
err
are shown in
Equation 15 and Equation 16.
ˆ
=
t t t
err x x
(15)
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
230
1
1
=
N
t
t
err err
N
(16)
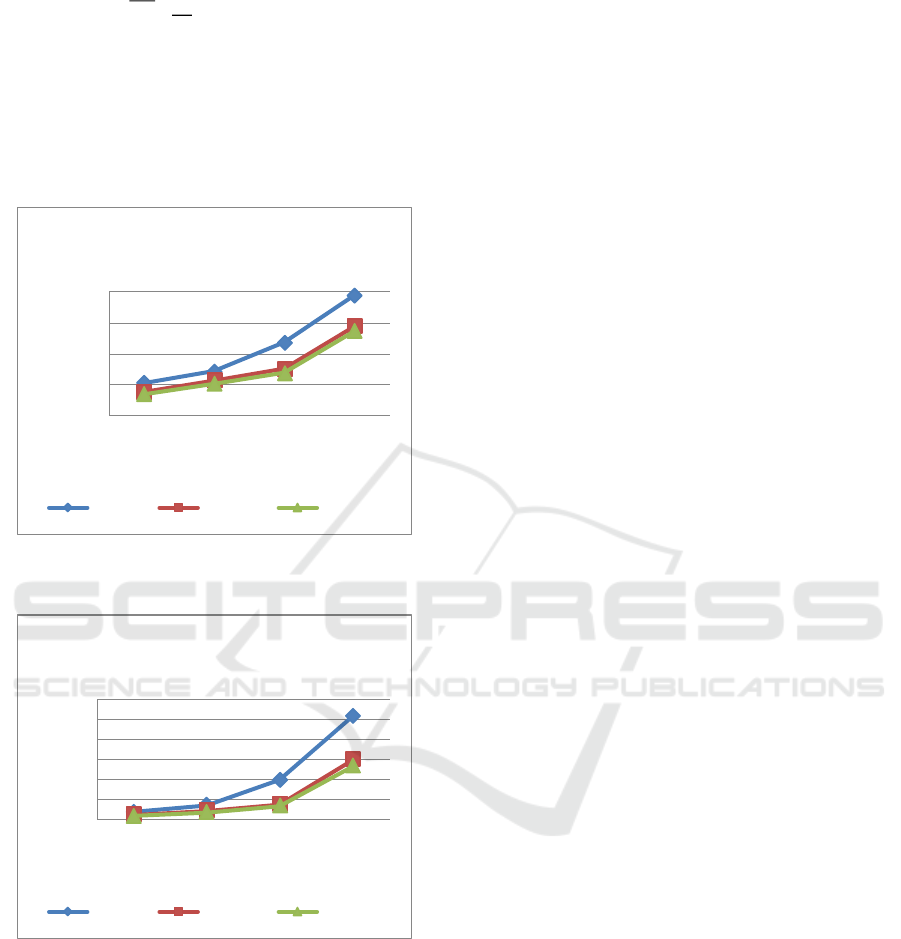
The average ratio λ and the variance δ
2
of the
prediction errors are used as indicators for evaluating
the forecasting model. The smaller the variance is, the
more stable and accurate the forecasting is. The
experimental results are shown in Figure 4 and Figure
5.
Figure 4: Comparison of the average ratio of prediction
errors.
Figure 5: Comparison of the variance of prediction
errors.
According to the above experimental results, as
the time interval increases, the average ratio and the
variance of the prediction error in model of each order
show an upward trend, which means the shorter the
time interval for monitoring the load value, the
smaller the error of the load forecasting value and the
smaller the error range. With the increase of the order,
the average ratio and the variance of the prediction
errors in model of each time interval show a
downward trend, which means the more load values
referenced in the model, the smaller the error of the
load forecasting value and the smaller the error range.
The 5th order model has fewer prediction
reference values, so the accuracy of the predicted
value changes relatively with the change of the time
interval. The evaluation index difference between the
10th order model and the 15th order model is small.
In order to reduce the complexity of the model, the
10th order model is selected. For the 10th order model,
when the time interval is less than 10 seconds, the
average of the prediction error is less than 8%, the
variance of the prediction error is less than 4. When
the time interval is 20 seconds, the average of the
prediction error is close to 15%. Since time is
required between transmitting the load forecasting
value and using the load forecasting value, the time
interval of 10 seconds is selected for modeling.
5 CONCLUSIONS
The current service health detection heartbeat
mechanism in Eureka can only detect whether the
service is online. And through the Spring-boot-
actuator module, the operating status can be
monitored before and after service registration. Based
on this, this paper adds the load information
monitoring component to monitor the load
information of the service node by means of the
Spring-boot-actuator module. Then the load
forecasting model is used to predict the load value
after a period of time and the load value will be fed
back to the registry. This method adds very little
overhead to the service provider, but the service
consumer can accurately obtain the load status of
each instance providing the same service from the
experimental results. Combined with the load
balancing algorithm, the consumer can call the
appropriate service instance more reasonably. Finally,
how the load balancing component in Ribbon client
combines the existed load balancing strategy with
load forecasting values in the service consumer will
be the direction of future research.
REFERENCES
Zheng M J, Zhang J Q. (2017), Discussion on the Evolution
of Big Platform System Architecture Based on
Microservice. Computer Engineering & Software,
38(12), p165-169.
0
0.05
0.1
0.15
0.2
1 5 10 20
Average error ratio
Time interval/second
Comparison of the average ratio of
prediction errors
5th order 10th order 15th order
0
5
10
15
20
25
30
1 5 10 20
variance
Time interval/second
Comparison of the variance of
prediction errors
5th order 10th order 15th order
A Method for Health Detection in Eureka Based on Load Forecasting
231

LEWIS J, FOWLER M. (2014), Microservices [online]. A
vailable at: http://martinfowler.com/articles/microservi
ces.html [Accessed 20 February 2019].
Smaoui G, Abid M. (2017), Development and
benchmarking of algorithm for heartbeat detection.
2017 International Conference on Smart, Monitored
and Controlled Cities (SM2C), p87-90.
Li Q H, Guo Z X. (2002), Approach to load prediction of
networks in workstations. Journal of Huazhong
University of Science and Technology(Natural Science
Edition), 30(06), p49-51.
Xu J F, Zhu Q B and Hu N. (2000), Predictive scheduling
algorithm in distributed real-time systems. Journal of
Software, 11(01), p95-103.
Meng L M, Xu Y. (2016), Load balancing algorithm based
on dynamic exponential smoothing prediction. Journal
of Zhejiang University of Technology, 44(04), p379-
382.
Wolski R , Spring N T and Hayes J. (2000), Predicting the
CPU Availability of Time-shared Unix Systems on the
Computational Grid. Cluster Computing, 03(04), p293-
301.
Yuan G. (2015), A Dynamic Load Balancing Scheduling
Algorithm Based on Service Differentiation and
Prediction. Computer Technology and Development,
25(06), p96-100.
Yang W, Zhu Q M and Li P F. (2006), Server Load
Prediction Based on Time Series. Computer
Engineering, 32(19), p143-145.
Dinda P. (1998), The statistical properties of host load.
Proceedings of the Fourth Workshop on Languages,
Compilers, and Run-time Systems for Scalable
Computers, p211-229.
Yang M J, Wang H and Zhao J F. (2016), Research on
Load Balance Algorithm Based on the Utilization Rate
of the CPU and Memory. Bulletin of Science and
Technology, 32(04), p160-164.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
232
