
Saliency Guided Depth Prediction from a Single Image
Yu Wang
1
and Lizhuang Ma
2
1,2
Department of Computing, Shanghai Jiao Tong University
Keywords: Single-image Depth Prediction, CNN.
Abstract: With the recent surge of deep neural networks, depth prediction from a single image has seen substantial
progress. Deep regression networks are typically learned from large data without much constraints about the
scene structure, thus often leading to uncertainties at discontinuous regions. In this paper, we propose a
structure-aware depth prediction method based on two observations: depth is relatively smooth within the
same objects, and it is usually easier to model relative depth than model the absolute depth from scratch.
Our network first predicts an initial depth map and takes an object saliency map as input, which helps to
teach the network to learn depth refinement. Specifically, a stable anchor depth is first estimated from the
detected salient objects, and the learning objective is to penalize the difference in relative depth versus the
estimated anchor. We show such saliency-guided relative depth constraint unveils helpful scene structures,
leading to significant gains on the RGB-D saliency dataset NLPR and depth prediction dataset NYU V2.
Furthermore, our method is appealing in that it is pluggable to any depth network and is trained end-to-end
with no overhead of time during testing.
1 INTRODUCTION
Depth prediction plays an essential role in
understanding the 3D geometry of a scene. It has
been shown that depth information can largely
facilitate other vision tasks such as reconstruction
(Silberman et al. 2012), recognition (Fox 2012) and
semantic segmentation (Cheng et al. 2017). Stereo
images (Kong and Black 2016) or image sequence
(Suwajanakorn, Hernandez, and Seitz 2015) usually
suffice for accurate depth prediction. While for
single-view depth prediction, it is an ill-posed
problem due to the lack of geometric information.
Ambiguities or uncertainties often happen at those
discontinuous regions between objects.
In this paper, we propose a structure-aware
depth prediction method based on two observations:
1) depth is relatively smooth within the same objects
when compared to within the full image; 2) and it is
often easier to model relative depth than model the
absolute depth value.
We incorporate such observations by learning
to refine depth map with the guidance of object
saliency (we use the saliency detector (Tong et al.
2015)). Generally, the saliency map of objects is a
simple way to reveal the scene structure in terms of
objects. Saliency map is also class-agnostic, thus can
cover a broad range of objects each with spatially
smooth depth values within its contour. As a result,
we are able to first estimate an anchor depth value of
the whole scene, from an initial depth map
reweighted by object saliency. Since almost all
object regions have small variance in depth values,
such anchor depth estimation can act as a reliable
reference. Then we take the anchor depth for depth
refinements of entire image in a relative way.
Previously (Chen et al. 2016) explored relative depth
estimation, but both their depth ground truth and
prediction are just ordinal, not real depth values.
Here we design a relative depth loss for our network
to learn the genuine relative depth of other pixels
versus the estimated anchor depth, and penalize the
deviation to correct relative depth.
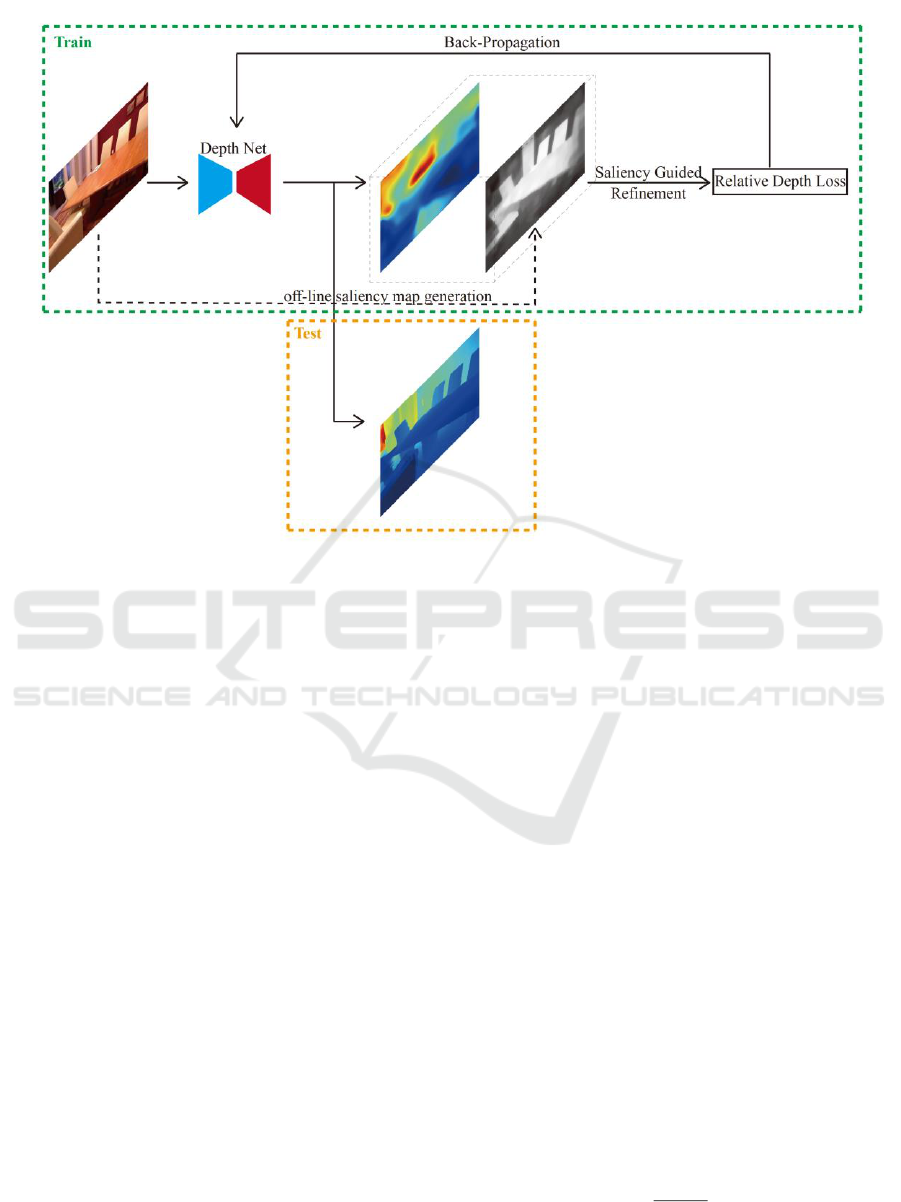
Fig. 1 demonstrates our overall learning
framework. During training, we propose two
formulations of relative depth constraints to
supervise the depth refinement process. At test time,
such finetuned network is simply applied for depth
prediction without any overhead. Obviously, our
method is pluggable to any depth network and can
be easily trained end-to-end. We show our saliency-
guided depth model does learn some scene structures,
leading to significant gains on the RGB-D saliency
dataset NLPR and depth prediction dataset NYU V2.
Wang, Y. and Ma, L.
Saliency Guided Depth Prediction from a Single Image.
DOI: 10.5220/0008099101530159
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 153-159
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
153
In summary, the contributions of our method
are as follows:
We propose the first single-image depth
prediction method guided by object saliency, to
the best of our knowledge.
A novel relative depth loss is proposed to learn
residuals versus salient anchor depth to
improve prediction.
Our method improves over state-of-the-art
depth networks at no time cost while being
pluggable to any type of depth prediction
networks.
2 METHOD
2.1 Training Initialization
For each training image, we need to get the initial
depth map prediction and a saliency map to improve
the former. Our method is applicable to any depth
network architecture, and we will show some
popular ones in our experiments. The saliency map
is acquired following the method in (Tong et al.
2015), which uses a bootstrap learning algorithm for
salient object detection where both weak and strong
models are exploited.
2.2 Anchor Depth Estimation
We already know that the depth is relatively smooth
within object regions, which means their depth
variance is pretty low compared to the variance in
the full image. Hence we rely on object saliency
detection to segment out all object regions with
consistent depth values. We also find it reasonable to
rely on the class-agnostic salient regions to obtain a
weighted average of depth value as a stable
reference in depth.
We consider the output depth map from the
network as
N
ii
d
1
}{
, and the input saliency map as
N
ii
p
1
}{
,
where
i
p
means the probability that i th pixel belongs
to the salient object. After that, we define the
saliency map as a weighting map and the normalized
weights
i
p
ˆ
as follows:
N
i
i
i
i
p
p
p
1
ˆ
(1)
Figure 1: Overview of our saliency-guided depth prediction framework. One base depth network first
generates an initial depth map and we take an extra saliency map by (Tong et al. 2015) to refine depth. We
first estimate a reliable anchor depth from object saliency-weighted depth values, and impose the relative
depth loss (versus anchor) as well as regular regression loss to finetune our network. This leads to improved
structure-aware predictions, which can be obtained by simply forwarding the network at test time.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
154

Then the depth conditional expectation of both
prediction
d
and ground truth
*
d
on
p
ˆ
can be
formulated as:
N
i
ii
N
i
ii
pdpdE
pdpdE
1
**
1
ˆ
*)
ˆ
|(
ˆ
*)
ˆ
|(
(2)
Through these calculations, we obtain the
baseline depth values of the prediction and the
ground truth, which are relatively more reliable than
the global mean values:
)()|(
*
dVarpdVar
.
2.3 Relative Depth Loss
To define the relative depth loss, we first normalize
the prediction and the ground truth with the anchor
depth value as shown in Figure 2. Here we design
two kinds of relative depth constraints,
corresponding to two common types of monocular
ambiguities. By means of these, the accurate
prediction can be propagated from the reliable
salient regions.
2.3.1 Absolute Difference Formulation
One representation of monocular ambiguity is that
the absolute difference of depth values between
different regions of a single image can be hardly
confirmed. To deal with this kind of ambiguity, we
define the depth absolute relation both over the
prediction and the ground truth as follows:
)
ˆ
|(
)
ˆ
|(
**
pdEdr
pdEdr
abs
abs
(3)
The depth absolute relation measures depth
differences as if both the prediction and the ground
truth values are shift along the optical line of sight
regardless of the bias between two expectations
calculated in Equation (2).
2.3.2 Relative Ratio Formulation
Another representation of monocular ambiguity is
that the depth ratio between different regions of a
single image can be hardly judged. Likewise we
define the depth ratio relation like this:
)
ˆ
|(/
)
ˆ
|(/
**
pdEdr
pdEdr
ratio
ratio
(4)
By the constraint towards depth ratio relations,
we can exact the depth scale between the prediction
and the ground truth as if the two depth maps are
projected and aligned with their salient regions.
2.4 Full Objective
Generally speaking, a standard loss function for non-
parametric regression problems is L norm loss
(usually MSE) or even some advantage regression
loss(i.e. BerHu from (Laina et al. 2016)) between the
prediction
d
and ground truth depth value
*
d
. We
record this loss as
d
L
.
Figure 2: Illustration of the Relative Depth Loss. After estimating the anchor depth value, we normalize
both the predicted and ground-truth depth maps by their absolute values within salient regions. We design two
approaches to constrain relative depth relation corresponding to two kinds of depth ambiguities.
Saliency Guided Depth Prediction from a Single Image
155

Besides the standard depth loss
d
L
above, we
choose L1 loss as the criterion over two kinds of
depth relations. That is:
|)(|
|)(|
*
*
ratioratioratio
absabsabs
rrEL
rrEL
(5)
And our final loss function can be formulated
as follows:
ratioratioabsabsd
LLLL **
(6)
Here
abs
and
ratio
act as the loss weights.
3 EXPERIMENTS
3.1 Datasets
To evaluate the effectiveness of our method, we
perform experiments over two datasets: the RGB-D
saliency dataset NLPR (Peng et al. 2014) and indoor
depth prediction benchmark dataset NYU depth v2
(Silberman et al. 2012).
3.1.1 NLPR Dataset
The NLPR dataset consists of 1000 RGB-D pairs
collected with Kinect, whose salient object is
already labeled out. The aspect ratios of data in this
dataset are not uniformed, with 698 horizontal and
302 vertical. To make a fair comparison, we
randomly choose a test set with 245 horizontal and
108 vertical, which shares almost the same
proportion between different aspect ratios.
3.1.2 NYU Dataset
The NYU depth dataset is one of the largest RGB-D
datasets for indoor scene reconstruction. The labeled
part contains 1449 RGB-D pairs with dense depth
maps. We perform this part of experiments on the
labeled part of this dataset and use the common test
subset of 654 images split by (Eigen, Puhrsch, and
Fergus 2014).
3.2 Metrics
We evaluate each method using several errors and
accuracy settings from previous depth prediction
works:
Abs Rel
i
i
ii
d
dd
N
*
*
||
1
log
10
i
dd
N
|loglog|
1
*
1010
RMSE
i
ii
dd
N
2*
||
1
Accuracy
% of
i
d
s.t.
),max(
*
*
i
i
i
i
d
d
d
d
3.3 Results
3.3.1 NLPR Dataset
Quantitative results for NLPR dataset are provided
in Table 1. It is illustrated that our method benefits
each baseline method both on accuracies and errors.
From the qualitative results shown in Figure 3, we
find that through our method the structure of the
salient region could be preserved compared to the
baseline method. And the performance of our
method would be limited by the accuracy of the
saliency map. The structure of salient object in the
vertical case are not so clear compared to the
horizontal case, as the quality of these two saliency
maps vary obviously. The effects by the accuracy of
saliency maps are further evaluated in the Ablation
Study subsection.
3.3.2 NYU Dataset
The quantitative results in Table 2 illustrate that our
method help each baseline method to gain an overall
boost in performance. Although the ability of pure-
learning baseline methods is relatively limited with
small amount of training data, our proposed method
cascading on baselines would be comparable with
Figure 3: Qualitative results of the NLPR
dataset. (a): input images. (b): ground truth
saliency labels. (c): saliency maps generated off-
line following the method in (Tong et al. 2015).
(d): output depth maps of the best baseline
method (Laina et al. 2016)
*
. (e): output depth
maps of our proposed method.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
156
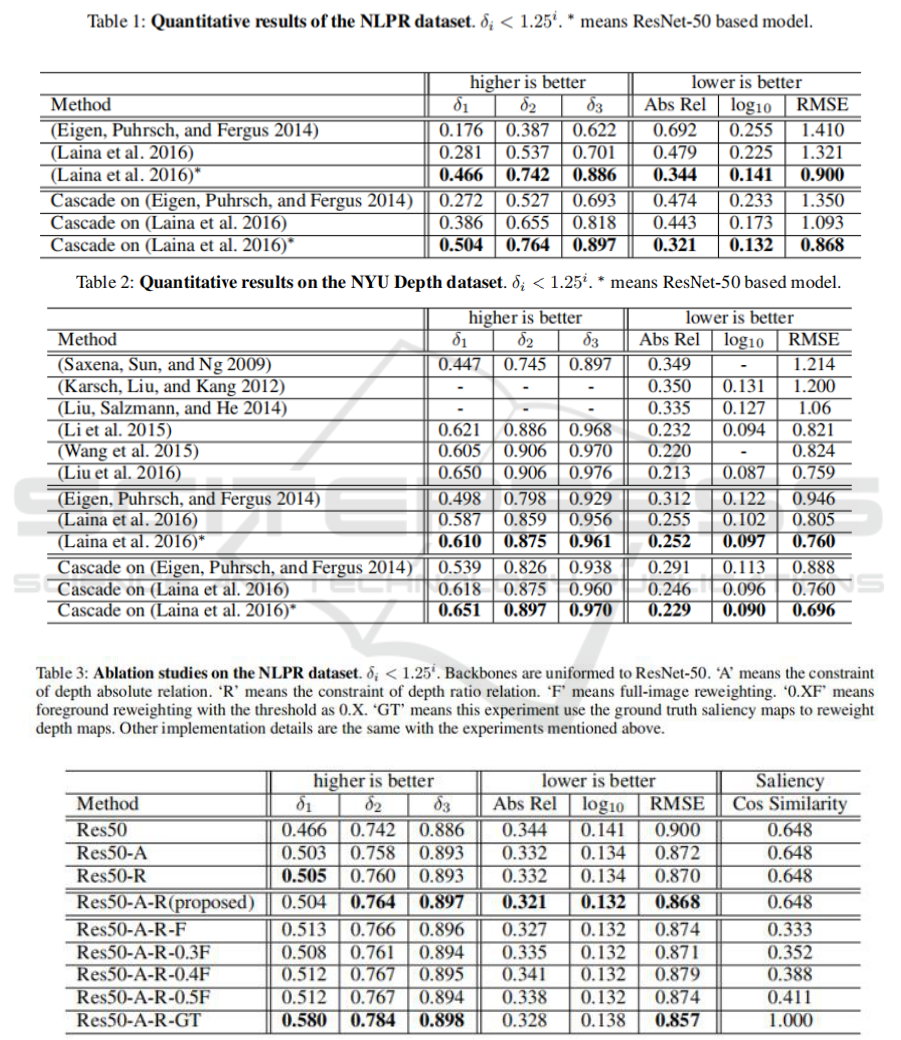
other state-of-the-art methods. Note that the NYU
Depth dataset actually does not contain salient object
label, but the saliency maps we obtained are still
meaningful.
Saliency Guided Depth Prediction from a Single Image
157

3.4 Ablation Study
We conduct a series of ablation studies to analyze
the details of our method on both datasets.
Quantitative results are shown in Table 3.
3.4.1 Mode of Anchor Depth Estimation
In our method we use the saliency map to reweight
both the prediction and ground truth to confirm the
anchor depth. To confirm the effects of this
reweighting, we design two other reweighting ways:
full-image reweighting and foreground reweighting.
Full-image reweighting makes the weight of every
pixel
i
p
equals to 1. Foreground reweighting makes
the weights equals to 1 on pixels whose depth value
ranks front within the threshold percentage and
leaves the rest to 0.
The results on both datasets indicate that
different reweighting ways have some effects but
our reweighting based on salient object detection is
more effective than alternative ways.
3.4.2 Constraints of Depth Relations
The two kinds of constraints towards depth relations
are designed for different representations of
monocular ambiguity. Thus we evaluate the gain of
each kind independently.
The results on both datasets show that two
kinds of constraints have their own positive effects
and would gain advance when performed together.
3.4.3 Accuracy of Saliency Map
The saliency maps used in our method are generated
off-line following (Tong et al. 2015). We explore the
effects of saliency accuracy for the saliency ground
truth is contained in the NLPR dataset. According to
Equation (1) in section 2.2, the saliency map only
have proportional meaning so we evaluate saliency
accuracy with cosine similarity.
Results in Table 3 show that the accuracy of
saliency would slightly contribute to lower RMSE
and higher
3
, but the overall effect is difficult to
evaluate. One possible reason is that the definition of
saliency is subjective so that the confidence of the
accuracy remains some doubt. However, this does
not fade the effectiveness of our method.
4 CONCLUSIONS
This paper proposes a structure-aware deep model
for depth prediction from single image. Our network
predicts an initial depth map and uses an extra object
saliency map to learn depth refinement. Concretely,
we estimate a stable anchor depth value from the
detected salient depth regions, and learn to penalize
the difference in relative depth versus the estimated
anchor. We show such relative depth constraint
significantly improves depth prediction accuracy,
and learns some helpful scene structures.
Furthermore, our method is pluggable to any depth
network and can be trained end-to-end without
inference overhead.
REFERENCES
Chen, W.; Fu, Z.; Yang, D.; and Deng, J. 2016. Single-
image depth perception in the wild. In Lee, D. D.;
Sugiyama, M.;Luxburg, U. V.; Guyon, I.; and Garnett,
R., eds., Advances in Neural Information Processing
Systems 29. Curran Associates, Inc. 730–738
Eigen, D., and Fergus, R. 2015. Predicting depth, surface
normals and semantic labels with a common multi-
scale convolutional architecture. In 2015 IEEE
International Conference on Computer Vision, ICCV
2015, Santiago, Chile, December 7-13, 2015, 2650–
2658.
Eigen, D.; Puhrsch, C.; and Fergus, R. 2014. Depth map
prediction from a single image using a multi-scale deep
network. In Ghahramani, Z.; Welling, M.; Cortes, C.;
Lawrence, N. D.; and Weinberger, K. Q., eds.,
Advances in Neural Information Processing Systems 27.
Curran Associates, Inc. 2366–2374.
Fox, D. 2012. Rgb-(d) scene labeling: Features and
algorithms. In IEEE Conference on Computer Vision
and Pattern Recognition, 2759–2766.
Godard, C.; Mac Aodha, O.; and Brostow, G. J. 2016.
Unsupervised monocular depth estimation with left-
right consistency. 6602–6611.
Karsch, K.; Liu, C.; and Kang, S. B. 2012. Depth
extraction from video using non-parametric sampling.
In Proceedings of the 12th European Conference on
Computer Vision - Volume Part V, ECCV’12, 775–
788. Berlin, Heidelberg: Springer-Verlag.
Kuznietsov, Y.; Stueckler, J.; and Leibe, B. 2017.
Semisupervised deep learning for monocular depth
map prediction. In cvpr.
Laina, I.; Rupprecht, C.; Belagiannis, V.; Tombari, F.; and
Navab, N. 2016. Deeper depth prediction with fully
convolutional residual networks. In 3D Vision (3DV),
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
158

2016 Fourth International Conference on, 239–248.
IEEE.
Li, B.; Shen, C.; Dai, Y.; van den Hengel, A.; and He, M.
2015. Depth and surface normal estimation from
monocular images using regression on deep features
and hierarchical crfs. In The IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Liu, M.; Salzmann, M.; and He, X. 2014.
Discretecontinuous depth estimation from a single
image. In IEEE Conference on Computer Vision and
Pattern Recognition, 716–723.
Peng, H.; Li, B.; Xiong, W.; Hu, W.; and Ji, R. 2014.
Rgbd salient object detection: a benchmark and
algorithms. In European Conference on Computer
Vision (ECCV), 92–109.
Saxena, A.; Sun, M.; and Ng, A. Y. 2009. Make3d:
Learning 3d scene structure from a single still image.
IEEE Trans. Pattern Anal. Mach. Intell. 31(5):824–840.
Silberman, N.; Hoiem, D.; Kohli, P.; and Fergus, R. 2012.
Indoor segmentation and support inference from rgbd
images. 7576(1):746–760.
Suwajanakorn, S.; Hernandez, C.; and Seitz, S. M. 2015.
Depth from focus with your mobile phone. In CVPR,
3497–3506. IEEE Computer Society.
Tong, N.; Lu, H.; Ruan, X.; and Yang, M. 2015. Salient
object detection via bootstrap learning. In 2015 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR), 1884–1892.
Wang, P.; Shen, X.; Lin, Z.; Cohen, S.; Price, B. L.; and
Yuille, A. L. 2015. Towards unified depth and
semantic prediction from a single image. In IEEE
Conference on Computer Vision and Pattern
Recognition, CVPR 2015, Boston, MA, USA, June 7-12,
2015, 2800–2809.
Saliency Guided Depth Prediction from a Single Image
159
