
Sensing as a Service- A Service-Oriented Collaborative Sensing
Framework for Detecting Composite Events in Industrial Cyber-
Physical System
Tao Wang
1
, Hong Xiao
2
and Lianglun Cheng
2
1
Faculty of Automation, Guangdong University of technology, Guangzhou, China
2
Faculty of Computer, Guangdong University of technology, Guangzhou, China
Keywords: Sensing as a service, RESTful sensing service, Collaborative sensing, Composite event, Service composition,
Industrial cyber-physical system.
Abstract: The widespread deployment of sensors in Industrial Cyber-Physical System (ICPS) enables real-time
monitoring kinds of composite events occurring in the industrial process. However, due to the high degree of
heterogeneity of the sensing nodes in ICPSs, it is very hard to effectively composing the platform-specific
functionalities provided by heterogeneous sensor nodes for detecting various composite events. In this article,
by exploiting REST framework and expanding the basic architecture of S2aaS, we propose a service-oriented
and lightweight collaborative sensing framework for detecting multiple composite events in ICPSs. Further,
the specific implementation details about the process of RESTful service registry of sensing node, sensing
service discovery and service composition is presented. We develop an application prototype to test the
feasibility and scalability of the system, and the experiment results show that RESTful-based sensing service
collaboration outperforms SOAP-based one with more lightweight communication and less power
consumption as expected. Based on our proposed collaborative sensing framework with Restful sensing
services, it is very convenient to provide a sensor web services for various requirements of composite event
detection.
1 INTRODUCTION
Recently, the widespread deployment of RFIDs,
sensors, wireless sensor networks, and embedded
systems has fostered the rise of industrial Cyber-
Physical Systems (ICPS), which is considered as
transformative technologies for managing
interconnected systems between industrial physical
assets and computational capabilities. ICPS is the
basic premise for the implementation of industry 4.0.
By integrating the emerging information and network
technologies (e.g., data sensing, network
transmission, high-performance computing, big data,
intelligent decision-making and controlling), ICPS is
able to greatly improves the performance on real-time
interaction, efficient collaboration and dynamic
optimization for the industrial system, and create a
new industrial manufacturing and information service
mode.
With the sensing devices deployed in industrial
lines, it is able to monitor the real-time status of the
industrial process for high quality. Specially, we are
very concerned about the composite events occurring
in the industrial process, e.g., abnormal changes in the
industrial production environment, abnormal
working status of mechanical equipment, and the
detection of such composite events is very helpful for
realizing dynamic feedback controlling and
scheduling on the industrial process. Unlike an
atomic event which depends on single-mode sensing
data, a composite event is a combination of several
atomic events and its occurrence is jointly determined
by collaborative sensing with heterogeneous sensors
(Chen, 2015). For example, in order to identify an
abnormal working status of mechanical equipment,
maybe it is necessary to collect the following multi-
modal sensing data from video sensors,
temperature/moisture sensors, displacement sensors,
vibration sensors, etc.
In general, with the widespread deployment of
RFIDs/ RFID readers and sensors in ICPSs, it is able
to detect kinds of composite events for obtaining
more meaningful information within a factory. On the
264
Wang, T., Xiao, H. and Cheng, L.
Sensing as a Service- A Service-Oriented Collaborative Sensing Framework for Detecting Composite Events in Industrial Cyber-Physical System.
DOI: 10.5220/0008099402640271
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 264-271
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

one hand, each composite event is determined with
the data from a set of heterogeneous sensing devices,
in the other hand some sensing devices could be
exploited simultaneously for detecting multiple
composite events. Various different types of
composite events are the consumers of sensor data, so
we need easy and feasible mechanisms to access the
large-scale distributed sensor devices in ICPSs.
However, in such environments, due to the device
heterogeneity and differing accompanying protocols,
integrating diverse sensing devices into observation
systems for detecting multiple composite events is not
straightforward (Guinard, 2010). Therefore, it is
crucial to build a coherent infrastructure which treats
sensors in an interoperable, platform-independent
way.
In recent years, several efforts have been invested
in order to handle the challenges related to the
integration of large-scale heterogeneous sensing
devices in an interoperable and uniform way. Sensing
as a service (S
2
aaS) is introduced to provide sensing
services using kinds of sensors via a cloud computing
system (Sheng, 2013). In the S
2
aaS cloud,
heterogeneous sensing devices are abstracted as
services and expose their functionalities with
common accessing interfaces and encodings. Web
Services
(Hoang, 2012) are proposed to provide a
standard and interoperable accessing means for
heterogeneous sensing devices. Because of the
constrained resources in the context of the ICPS, the
RESTful Web Services (Garriga, 2016)
have been
exploited in some studies for many advantages over
arbitrary Web Services (i.e., SOAP), such as less
overhead, less parsing complexity, statelessness, and
tighter integration with HTTP. Therefore, with the
architecture of S
2
aaS and RESTful Web Services, it
is able to provide high-level abstraction for the
development of detecting multiple composite events
in ICPSs.
There are some related researches on building
lightweight REST framework for wireless sensor
networks. In the study of environmental sensor
monitoring (Lee, 2014), Restful Web Service is used
for communication with the Arduino-based sensors.
To address the constrained resources in sensor nodes,
Rouached et al. (Rouached, 2012) propose a
lightweight RESTful approach based on Restful SWE
services for interacting with the constrained WSNs.
Taherkordi et al.
(Taherkordi, 2011) apply REST
concepts to develop Web services for WSNs and
smartphones as two representative resource-
constrained platform. The above studies have
provided a framework for developing Restful web
services for sensor nodes, however, there are also few
researches on how to efficiently combine kinds of
Restful sensing services for detecting various
composite events.
In this paper, by exploiting REST framework and
expanding the basic architecture of S
2
aaS, we study
to present a service-oriented and lightweight
collaborative sensing framework with more specific
implementation details for detecting multiple
composite events in ICPSs. Each sensing device
register its service in the sensing cloud platform.
When a user initiates a request of detecting a
composite event, the proposed framework will
automatically resolve the request into a set of sensing
tasks and then push it to a subset of sensing devices
that happen to be in the area of interest. Based on our
proposed collaborative sensing framework with
Restful sensing services, it is very convenient to
provide a sensor web services for various
requirements of composite event detection, enable
users to connect and share the heterogeneous sensor
resources more efficiently.
The rest of this paper is organized as follows. The
Restful sensing services and composite event model
are described in Section 2. In Section 3, we present
the service-oriented collaborative sensing framework.
In Section 4, an automatic sensing service
composition process for detecting a composite events
is introduced. We provide the experimental results in
Section 5 and conclude the paper in Section 6.
2 RESTFUL SENSING SERVICES
2.1 Restful Web Service for Sensing
Nodes
Representational State Transfer (REST) is an
architectural model for building distributed
applications flexibly (Pautasso, 2008). It exploits the
natural structure of the Web and is efficiently
implemented with the Hypertext Transfer Protocol
(HTTP). Considering the constrained resources of
sensing nodes in ICPS, RESTful web service is
suitable to be used in ICPS due to its lightweightness
and its resource-oriented conception. In RESTful
architecture, every sensing sources can be uniquely
identified as a URI, for example, a URI for a vibration
sensor on a sensing node which monitors the status of
the equipment m located in workshop n is shown as
follows:
/{Location}/sensingnode/{n_id}/sensor/vibration,
here, location= /workshop_n/equipment_m.
Based on the unique identification through URIs,
a node is able to provide a RESTful Web service with
Sensing as a Service- A Service-Oriented Collaborative Sensing Framework for Detecting Composite Events in Industrial Cyber-Physical
System
265

a uniform interface by using standard HTTP methods
(GET, PUT, POST, DELETE).The sensing node is
embedded with a lightweight web server with basic
HTTP functionality, e.g., NanoHTTPD (Elonen,
2018), a tiny web server which has been proven to be
suitable for the resource constrained environment.
We can obtain the data from the light sensor by the
following HTTP GET request:
GET /{Location}/sensingnode/{n_id}/sensor/light
HTTP/ 1.1
Content-type: application/json
Although the whole set of standard HTTP
methods could be used, there are some resources
which don’t offer all of them. Some HTTP methods
is not able to be matched to any functionality of the
corresponding resources, e.g., no functionality of the
temperature sensor that could be matched on a
DELETE action.
As shown in Figure 1, for a sensing node deployed
with several sensors, we present a hierarchical
organization of the sensing resources, which are in
turn helpful for generating the URIs of sensing
resources. We can notice that a sensing node may
generally contain the following resources: some
sensors for provide sensing data, LEDs that offers
pulling and changing its state, battery, and tasks that
can be created, supervised, altered and deleted.
Unlike sensors and LEDs which are physical entities,
a task is a logical resource. Given the parameters of
execution frequency, threshold and target sensor, a
task is able to periodically check the corresponding
sensor value against a certain threshold and then alert
if the threshold is exceeded.
Sensing node
{id}
sensor
temperature
vibration
humidity
pressure
led
{id}
battery
task
Equipment m
{id}
actuator node
{id}
Workshop n
Figure 1: Hierarchical organization of sensing
resources.
Therefore, each service provide by a sensing node
can be addressed and accessed with a unique URI.
URIs provide a global naming scheme which allows
lightweight service discovery. With the URIs, kinds
of resources can be organized more effectively and
helpful for building an automatic service discovery
and composition framework.
2.2 The Composite Event Model
Events are classified into atomic events and
composite events. An atomic event denotes an
observable occurrence of a phenomenon or an object
reflected by a single sensing value, e.g., the
temperature of the workshop exceeds a warning
threshold. An atomic event can be represented by e(t,
l, R), where t is the occurrence time of the event and
it could be a time-interval or a time point, l is the
occurrence location which could be a specific point
or field in the workshop, R is expressed by a logic
expression which denotes the condition of the event
occurring. For example, e(14/06/2017, /workshop_n/
equipment_m, temperature>60℃) expresses that the
temperature of the equipment m on 14/06/2017 is
greater than 60℃.
A composite event characterizes an observable
occurrence of a complex phenomenon or an object,
and it is composed by several atomic events with the
specific temporal and spatial constraints. Given an
atomic event e
i
(t
i
, l
i
, R
i
), a model of the composite
event can be described as follows (Gao, 2015).
12
1 1 2 2
( ... , )
(( , ),( , ),...,( , ), , , )
k t l
k k t l
E R R R C C
E e e e C C
(1)
where
i
(0≤
i
≤1) is the confidence of an atomic
event e
i
which indicates the occurrence probability of
the composite event E when e
i
is occurring. C
t
and C
l
respectively represent the temporal and location
constraints on the atomic events. R
i
defines the
occurrence conditions of the atomic events. The
parameter
could be computed from
12
{ , ,..., }
k
,
and it denotes the occurrence confidence of the
composite event E when all the related atomic events
happen. Therefore, based on the formula (1), each
composite event can be parsed to be several atomic
events with the same temporal and location
constraints and different event occurring conditions.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
266

3 SERVICE-ORIENTED
COLLABORATIVE SENSING
FRAMEWORK
In this section, in order to provide a flexible platform
for building the applications for detecting composite
events, we introduce a service-oriented collaborative
sensing framework based on the RESTful web
services of sensing nodes. The framework shown in
Figure 2 consists of several subsystems and modules.
The first subsystem Rest-Based Sensing Node is
composed by kinds of heterogeneous sensing devices
with different operation systems (e.g., Z-Stack, Tiny
OS, Contiki) and communication methods (e.g., WiFi,
IEEE 802.15.4). These sensing devices are equipped
with a tiny web server supporting the basic web
service interface, and then provide lightweight
RESTful web services with HTTP methods. Each
sensing node registers its services with the following
root URI: /{Location}/sensingnode/{n_id}.
Rest-based
sensing node
Restful Service
URI Publish
Restful Service Registry
Root URI
Registry
URI Resolution
Service
Repository
Service Discovery
Context
Matching
Instance
Searching
Instance
Ranking
Service Composition
Service Query
Candidate services
and their URIs
Composition
Broker
Service Selector
Service Binder
Service
Executor and
Subscriber
Restful Service
Subscribe
Composite Event Detection
Temporal and
Spatial Context
Extract
Composition
Plan Creator
Z-Stack Tiny OS
Andriod
Contiki Z-Stack
WinCE
Restful
service URI
crawler
Figure 2: A service-oriented collaborative sensing
framework based on the RESTful web services.
Service Registry is the second subsystem which is
responsible for handling the register requests of each
node, and then gets all the service URIs with a web
service crawler. The URI Resolution module in this
subsystem resolves the URIs of RESTful web
services and then obtains its functionality and spatial
property, which are helpful for the implementation of
service discovery. The third subsystem Service
Discovery has three main modules including Context
Matching, Instance Search and Instance Ranking, and
finds out candidate services and their URIs from
Service Cache according to kinds of service queries
from the subsystem of Service Composition.
The fourth and central subsystem Service
Composition is mainly responsible for providing
composition services in the framework. The
Composition Broker receives a request with
composition plan of a composite event detection tasks,
and then deliver an appropriate composition service
by calling three functional modules including Service
Selector, Service Binder, Service Executor and
Subscriber. The fifth subsystem Composition Event
Resolution is also an important part, which is playing
as a link between the service composition subsystem
and the user who launches the detection request of
composite event. This subsystem is functionally
divided into two main modules including
Composition Plan Creator, Temporal and Spatial
Context Extractor.
3.1 Service Registry
All the Rest-based sensing nodes publish the services
with their root URIs, e.g., /{Location}/sensingnode/{id}.
With the root URIs of sensing nodes, the Restful
service URI crawler sends a request for obtain the
specific service description of each sensing node with
the hRESTS microformat. Then, by using
MicroWSMO, which is a lightweight semantic
service description approach based on WSMO-Lite
service ontology, the service resolution module is
able to add semantic information on top of hRESTS
service document. With the WSMO-Lite service
ontology, a sensing service can be described with the
following four types of service semantics:
information semantics, functional semantics, non-
functional semantics and behavioral semantics.
We can then extract RDF data from the
MicroWSMO semantic descriptions for the RESTful
services. The RDF data could be mapped with the
four types of semantics (functional, nonfunctional,
behavioral and information) defined by WSMO-Lite,
and then a RESTful service can be described with
RDF data as follows.
RESTful Service
Functional semantics:
Has_ServiceId: onto:restws#ServiceId
Has_ServiceLabel: onto:restws#Label
Has_Provider: onto:restws#NodeId
Nonfunctional semantics:
Has_ServiceLocation: onto:restws#ServLocation
Has_ServiceTime: onto:restws#ServTime
Has_BatteryLevel: onto:restws#BatteryLevel
Has_cost: onto:restws#Cost
Behavioral semantics:
Has_OperationId: onto:restws#OpId
Has_OperationLabel: onto:restws#OpLabel
Has_OpMethod: onto:restws#OpMethod
Has_URI: onto:restws#URI
Information semantics:
Has_input: onto:restws#OpInput
Has_output: onto:restws#OpOutput
Sensing as a Service- A Service-Oriented Collaborative Sensing Framework for Detecting Composite Events in Industrial Cyber-Physical
System
267

3.2 Service Discovery
Given a service query SQ={FQ,NQ,IQ} from the
service composition module, the service discovery
module returns an appropriate service instance
SI={FI,NI,BI,II} by matching the query with the huge
amount of candidate service instances. As shown in
Figure 3, we present a multi-stage semantic service
discovery process, which includes the following steps:
1) service type lookup based on functional and
information semantics; 2) service filtering by context
matching with nonfunctional semantics (mainly with
spatial and temporal contexts); 3) service ranking
with some key factors from the service nonfunctional
semantics (e.g., cost, residual battery level), and
service monitor module collects the dynamic
nonfunctional information.
Service
query
Service
instance
1. Service
type lookup
3. Service
instance ranking
2. Service filtering
by context matching
Service Discovery
Service Repository Service Monitor
Service Composition Module
S
Q
={F
Q
,N
Q
,I
Q
}
S
I
={F
I
,N
I
,B
I
,I
I
}
Figure 3: A multi-stage service discovery process.
3.2.1 Service Type Lookup
This the first stage of service discovery process. The
service type lookup module matches the service query
and the service instances based on the functional and
information semantics, and it selects out a set of
appropriate RESTful services with the same service
type of the service query. However, because the
process of matching semantic ontology concepts
among all the individual service instances has
typically been time and resource intensive, some
efficient service organization model and matching
algorithms should be adopted.
As shown in Figure 4, a service organization and
Matching with Dynamic Bloom Filter (DBF) is
exploited. Firstly, the RESTful semantic services in
the service cache is categorized with different service
types, and each service type is mapped into a bloom
filter with m bits which manages kinds of service
types. With a number of j hash functions h
j
( ), the
functional and information semantics of a service
instance are hashed into random numbers between 1
and m, and plus one to the numerical numbers of
corresponding bits. Then, the service instances which
have the same hash operation results are clustered
together.
Secondly, each cluster of service instances with
the same service type is managed with a dynamic
bloom filter including multiple static bloom filters
with m bits. The service instances which have the
same contexts (mainly refer to spatial and temporal
contexts) are managed with a static bloom filter.
Service
Cluster1
Service Type 2 Service Type 3
0
2
0
0
2
0
2
0
2
0
2
0
0
0
2
0
SBF
1
SBF
2
h
1
(s
a
)
h
1
(s
b
)
h
2
(s
b
)
h
2
(s
a
)
h
j
(s
a
)
h
j
(s
b
)
h
1
(s
c
)
h
1
(s
d
)
h
2
(s
d
)
h
2
(s
c
)
h
j
(s
c
)
h
j
(s
d
)
m bit vector
SBF
1
SBF
2
DBF
Service Type 1
Service
Cluster2
Service
Cluster3
DBF DBF
Context1
Context2
1 1 1 2 0 1 1 0 2
Bloom Filter
for service type lookup
h
1
(s
c1
) h
j
(s
c1
) h
1
(s
c2
) h
j
(s
c2
)
Figure 4: Service organization and Matching with
Dynamic Bloom Filter.
3.2.2 Service Filtering by Context Matching
This module is helpful for reducing the service
exploration space greatly, and it is a lightweight
service filtering process based on a small set of
contexts (mainly on spatial and temporal contexts,
e.g., service location, service time) which are
extracted from the service nonfunctional semantics.
In order to improve the efficiency and success ratio of
service discovery, the context matching module
filters out the RESTful semantic services of which the
spatial and temporal contexts do not match the
contexts of the service query apparently. For example,
in order to monitor a dangerous gas leakage which
may happen at workshop A, the services provided by
the sensors far away from workshop A should be
filtered out first.
Besides, depending on their value types, the
contexts are generally classified into numeric and
instance contexts. For example, the service location
“workshop A” is an instance and spatial context, and
the service time “14/06/2017” is a numeric and
temporal context. As shown in Figure 5, the service
instances with the same spatial and temporal contexts
are managed by the same static bloom filter. Then, the
service location and service time of a service query
and service instances are matched by the static bloom
filters contained by a DBF with the same service type.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
268
After service type lookup and service filtering by
context matching, we can obtain a set of service
instances that match the functionality and context
requirements of a service query.
3.2.3 Instance Ranking
In order to get a most appropriate service instance
from the candidate service instances selected out by
the above steps, this module ranks the candidate
service instances based on their service cost, quality
of service, residual battery level, etc. The output of
the ranking process is an ordered list of service
instances corresponding to the non-functional
requirements expressed by the service query.
Generally, those service instances that have high
battery level and low service cost get higher rankings.
4 AUTOMATIC SENSING
SERVICE COMPOSITION FOR
DETECTING A COMPOSITE
EVENTS
4.1 Composition Plan Description
Language (CPDL) for Composite
Event
For a composite event detection request, we need
make a composition plan for it. As described in
section 3.2, a composite event is denoted as
12
( ... , )
k t l
E R R R C C
, and R
i
denotes the
condition of an event occurring which is monitored
by a sensing service S
i
. For example, an atomic event
temperature>60℃ should be monitored by a
temperature sensor with its service SensingTemperature.
In order to distribute a composite event detection request
to kinds of sensing services, here, the language called
Composition Plan Description Language (CPDL)
(Han, 2014)
has been designed to describe
composition plans.
An example of a CPDL document for a fire event
detection is shown in Listing 1. This document
describes a composition plan with the context
requirements including a specific location and a
specific data acquisition frequency. It also describes
the composite service consisting of three component
services SensingTemperature, SensingLight and
SensingHumidity which detect the related atomic
events.
Listing 1. Composition Plan Description Language
(CPDL) for a fire event detection
4.2 Automatic Sensing Service
Composition
The service composition plan of a composite event
detection is then transferred to the service broker
module in the Service Composition subsystem. The
service broker invokes three functional modules to
accomplish the task of service composition, and the
specific process is described as follows:
1) Service Query: The service broker resolves the
CPDL for a composite event detection request,
and extracts the specific contexts and component
services defined by the CPDL. For example, the
location workshop_n and the required component
service SensingLight can be extracted. Then, the
service queries are sent to the service discovery
subsystem and then waiting for the returned
candidate service instances and their URIs.
2) Service Selection: With the candidate service
instances for each required component service,
this module selects the appropriate combination
according to the overall non-functional
requirements of the composite event detection,
such as available battery level, service cost.
Therefore, there will be a combinatorial
optimization problem for selecting service
instances for detecting multiple atomic events,
and the intelligent particle swarm optimization
algorithm is exploited to handle this problem.
3) Service Binding: This module binds the selected
service instances to their operations. For example,
the service SensingLight provided by a sensor
node 1 in workshop 1 is bound to the following
operation:
GET http://workshop_1/sensingnode/{1}/sensor/light
4) Service Executor and Subscriber: This module is
responsible for executing the whole process of
service composition, and sends the requests
according to the defined operations. Generally,
there are two ways to get sensor data: the
request/response mode is always used to get
sensor data once, and the subscription/
1. <CSDL xmlns:xsi=http://xxxx/SaaS>
2. <context location=workshop_n, data_freq=5
seconds>
3. <service> SensingTemperature</service>
4. <service>SensingLight</service>
5. <service>SensingHumidity</service>
6. </context>
7. </CSDL>
Sensing as a Service- A Service-Oriented Collaborative Sensing Framework for Detecting Composite Events in Industrial Cyber-Physical
System
269
publishing mode is always suitable for gathering
data periodically.
5 PROTOTYPE AND
EXPERIMENTS
As shown in Figure 5, a system prototype was
developed to illustrate the operation of the service-
oriented collaborative sensing system and to test the
feasibility and scalability of the system. There are
kinds of sensor nodes which are deployed in two
workshops, and the sensor nodes includes
temperature and humidity sensor node, light sensor
node, smoke sensor node, CO2 sensor node, CCD
node, and so on. The sink node is responsible for
forwarding the sensing data from the sensor nodes to
the platform and the operation commands from the
platform to the sensor nodes. All the sensor nodes are
equipped with a lightweight web server NanoHTTPD
[11]
, and respond kinds of HTTP requests in JSON
format. The sensor nodes register their ID and service
capabilities at the platform. The gateway is mainly
responsible for data forwarding and network protocol
conversion. The platform of SaaS (Sensing as a
service) in Figure 5 implements the subsystems
defined in Figure 3, including service registry, service
discovery and service composition. The platform
receives various requests of composite event
detection from web clients and returns the related
messages when the composite events happen and
have been detected.
Temperature/Humi
dity sensor node
Platform of
Sensing as a Service
Event
Detection
Request
Event
Detection
Response
Sink
Node
Sink
Node
Light sensor
node
Smoke
sensor node
CO2 sensor node CCD node
WSN Sink
node
workshop 1
workshop 2
Gateway
Web
Client
Figure 5: A system prototype for verifying the
proposed service-oriented collaborative sensing
framework.
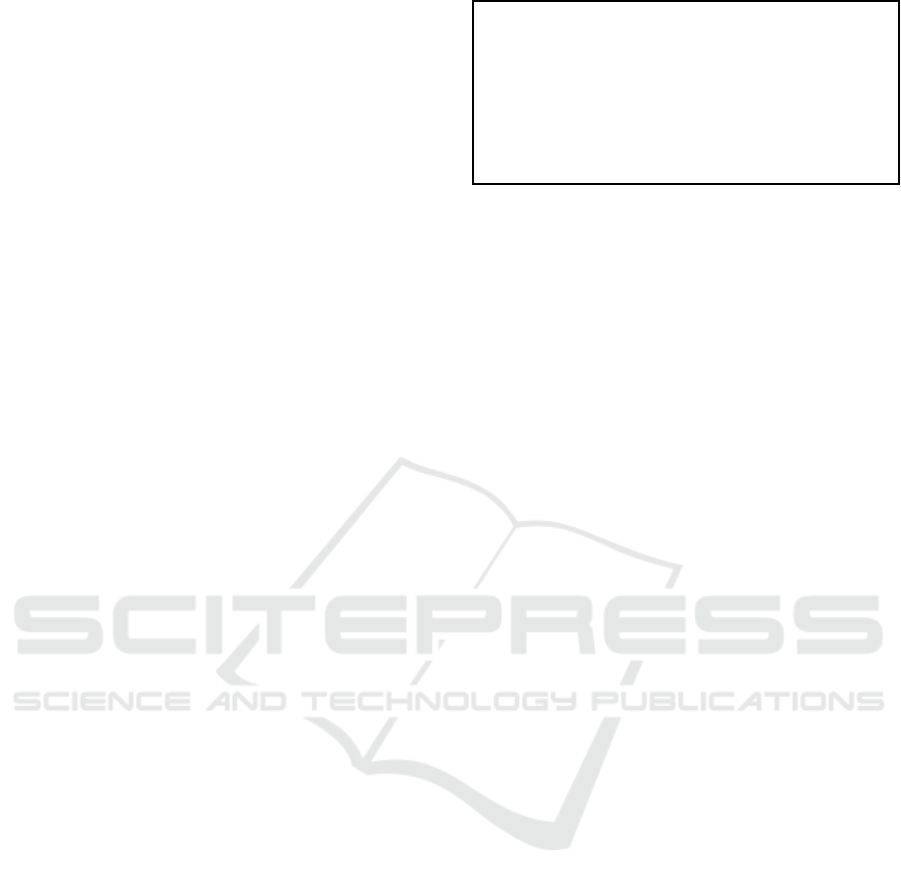
In order to evaluate the feasibility and scalability
of the proposed system, the following experiments
were carried out to verify the service discovery,
service selection as well as service composition and
execution processes. Firstly, we measure the cost of
data transmission for the proposed Restful service
composition method. For the request/response
process of the same component service (e.g.,
SensingLight), we study the performance on data
transmission duration by comparing different
technologies of web services including REST/JSON,
SOAP/XML and REST/XML, and the experiment
results are shown in Figure 6. It is clear that the
reduction of the transmission time is more obvious by
using REST instead of SOAP. Even for REST, with
JSON format the results are better than with XML
since XML is verbose.
Figure 6: Data transmission duration – REST/JSON
vs REST/XML vs SOAP/XML.
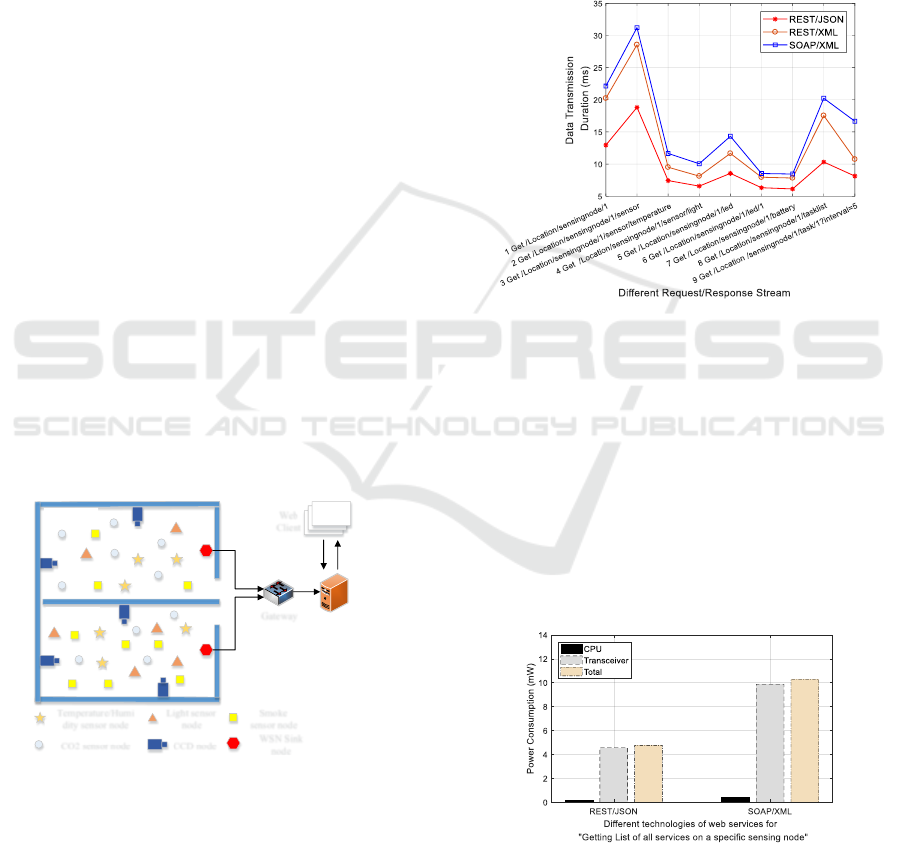
As shown in Figure 7, we also evaluate the power
consumption of getting list of all services on a
specific sensing node when using different
technologies of web services including REST/JSON
with SOAP/XML. As it is expected, SOAP/XML-
based Web service consumes much more energy,
especially for data communication. The CPU power
consumption due to parsing and processing SOAP
messages is ignorable when compared with the power
usage of radio.
Figure 7: Power consumption for different
technologies of web services.
The service discovery and selection process is the
most time-consuming part in the whole service
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
270

composition process. Therefore, the second set of
experiments aims to measure the time performance of
service discovery and selection as the number of
sensor nodes increases from 50 to 500, and the results
are shown in Figure 8. We can find that the time of
service composition keeps under 150ms even in a
critical situation with the participation of 500 devices,
and the stability of the system has been well
guaranteed with the proposed service discovery and
selection method.
Figure 8: Duration of service composition process vs
the number of sensor nodes increase from 50 to 500.
6 CONCLUSION AND FUTURE
WORK
In this paper, by exploiting the technology of
RESTful web service, we have proposed a loosely-
coupled, lightweight and service-oriented
collaborative sensing framework for detecting
multiple composite events in ICPSs, and provides
more specific implementation details about RESTful
service registry, service discovery, service
composition. We also present an application
prototype and evaluate the performance of
REST/JSON based web service by comparing with
other technologies of web services including
SOAP/XML and REST/XML. The experiment
results show that RESTful-based sensing service
collaboration outperforms SOAP-based one with
more lightweight communication and less power
consumption as expected. The future work will focus
on how to optimize the process of service
composition when handling concurrent requests of
composite event detection.
ACKNOWLEDGEMENT
Our work is supported by Guangdong Provincial Key
Laboratory of Cyber-Physical System as well as
multiple funds in china, including the National
Natural Science Foundation of China (61502110,
61672170), the Key Program of NSFC-Guangdong
Joint Funds (U1801263, U1701262), Major projects
of science and technology plan of Guangdong
Province (2015B090922013, 2017A010101017,
2017B090901019,2016B090918045,2016B0909180
17).
REFERENCES
C. L. Chen, J. Yan, N. Lu, et al., 2015. Ubiquitous
Monitoring for Industrial Cyber-Physical Systems Over
Relay Assisted Wireless Sensor Networks. IEEE
Transactions on emerging topics in computing, vol 3,
no. 3, pp. 352-362.
D. Guinard, Vlad Trifa, et al., 2010. Interacting with the
SOA-Based Internet of Things: Discovery, Query,
Selection, and On-Demand Provisioning of Web
Services. IEEE Transactions on services computing,
vol. 3, no. 3, pp. 223-235.
X. Sheng, J. Tang, X. J. Xiao, et al., 2013. Sensing as a
Service: Challenges, Solutions and Future Directions.
IEEE Sensors Journal, Vol. 13, No. 10, pp. 3733- 3741.
D. D. Hoang, H. Y. Paik, 2012. Service-Oriented
Middleware Architectures for Cyber-Physical Systems.
IJCSNS International Journal of Computer Science and
Network Security, Vol.12 No.1, pp.79-87.
M. Garriga, C. Mateos, Andres Flores, et al., 2016.
RESTful service composition at a glance: A survey.
Journal of Network and Computer Applications, 60, pp.
32-53.
S. C. Lee, J. Y. Jo, et al., 2014. Environmental Sensor
Monitoring With Secure Restful Web Service.
International Journal of Services Computing, Vol. 2,
No. 3.
M. Rouached, S. Baccar, et al., 2012. RESTful Sensor Web
Enablement Services for Wireless Sensor Networks,
IEEE Eighth World Congress on Services, pp. 65-72.
A. Taherkordi, F. Eliassen, et al., 2011. Chapter 9: RESTful
Service Development for Resource-Constrained
Environments. REST: From Research to Practice.
C. Pautasso, O. Zimmermann, et al., 2008. Restful web
services vs. "big" web services: making the right
architectural decision. In Proceedings of the 17th
international conference on World Wide Web, pp. 805-
814, NY, USA.
J. Elonen. Nanohttpd. https://github.com/NanoHttpd/
nanohttpd. (last accessed 24 Nov 2018)
J. Gao, J. Z. Li, Z. P. Cai, et al., 2015. Composite Event
Coverage in Wireless Sensor Networks with
Heterogeneous Sensors. INFOCOM, pp.217-225.
S. N. Han, G. M. Lee and N. Crespi, 2014. Semantic
Context-aware Service Composition for Building
Automation System. IEEE Transactions on industrial
informatics, vol.10, no.1, pp.752-761.
Sensing as a Service- A Service-Oriented Collaborative Sensing Framework for Detecting Composite Events in Industrial Cyber-Physical
System
271
